










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkINTRODUCCIÓN
El crecimiento de la población a nivel mundial y la necesidad de satisfacer los requerimientos energéticos que dicha población requiere para tener una buena calidad de vida, está ocasionando que los métodos tradicionales de suministro de energía eléctrica que consisten en generadores de corriente alterna CA, de muy alta potencia de manera centralizada, empiecen a ser desplazados por un sistema de generación distribuida con un número extremadamente grande de plantas de generación de corriente directa CD de potencia pequeña-media y generadores de corriente alterna alimentados por fuentes de energía renovable conectadas a la red a través de convertidores electrónicos de potencia, este último adaptando la energía producida a las especificaciones de la red [1,2].
Lo anteriormente mencionado, se debe principalmente a la gran preocupación a nivel mundial sobre el cambio climático ya que la energía eléctrica generada actualmente es principalmente a partir de petróleo, carbón y gas. Estas formas de producción de energía son altamente contaminantes y esparcen a la atmósfera gran cantidad de partículas de CO2 lo que ocasiona se acentúe todavía más el efecto invernadero causa principal de las modificaciones en el clima terrestre. De ahí que países como los que integran la comunidad económica europea UE y otros tienen metas de satisfacer sus necesidades energéticas con fuentes de energía limpias como son las renovables, hasta en un 30 % de su total para el 2030 [1,3].
Como los inversores pueden permitir la operación de una gran cantidad de plantas de generación fotovoltaicas, turbinas eólicas, celdas de combustible, etc. Además de poder funcionar como sistema aislado. Estos sistemas están conectados a la red eléctrica a bajo voltaje (<=13.8 kV) que se ven afectados por cargas no lineales. Por lo que estos sistemas deben ser controlados considerando armónicas, resonancias y otros problemas de calidad de la energía. En el caso de sistemas monofásicos (generación de energía residencial), la atención a estas perturbaciones debe ser mayor[3-6].
Actualmente, la investigación se enfoca en desarrollar topologías que permitan al inversor reconfigurarse, evitando que éste deje de funcionar y deba salir de la red eléctrica. Además de trabajar con algoritmos de control que lo permitan [3-7]. Como una de las aplicaciones principales es la generación distribuida de energía eléctrica cuya característica más importante es su intermitencia [6], por lo que se trabaja en aprovechar el alto desarrollo tecnológico para dotar al convertidor de dispositivos de potencia que conmuten a altas velocidades [2-8], de una arquitectura digital que tenga la capacidad de comunicación bidireccional [9-13], una robusta infraestructura de software que le permita cambiar sus características de operación (reconfiguración) basado en condiciones de la red eléctrica al ser adaptable [9-12]. Puede y debe ser capaz de enviar y recibir mensajes de forma rápida, así como clasificar los datos, compartirlos con el propietario, los responsables de la red eléctrica pública y otras partes interesadas, diagnosticar problemas de operación y mantenimiento incluyendo la predicción de posibles problemas del inversor, actualizar de manera remota algunos parámetros [13,14], etc.
Por lo mencionado anteriormente, se realiza el análisis de los resultados experimentales del comportamiento de un inversor monofásico de puentes H en cascada de siete niveles, aplicando control PWM multicarrier. El control aplicado al inversor permite modificar el índice de modulación en frecuencia, índice de modulación en amplitud y con un analizador de la calidad de la energía capturar la información del contenido armónico y determinar la calidad de la energía generada para comparar con los estándares internacionales al respecto.
MATERIALES Y MÉTODOS
Los convertidores multinivel con aplicaciones industriales poseen diferentes topologías: convertidor de sujeción por punto neutro, convertidor de sujeción con capacitores flotantes, convertidor de puentes H completos, convertidor de sujeción de punto neutro activo [7,14,15].
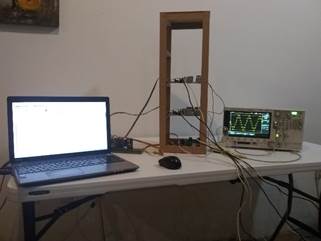
En este trabajo, se utilizó puentes H completos en cascada para generar el convertidor multinivel. El inversor y equipo de experimentación se muestran en la figura 1. Las características más importantes en esta topología son las siguientes: cada módulo maneja parte del total de la energía suministrada al convertidor; además, la eficiencia del convertidor de potencia es constante dentro de todos sus rangos de operación.
Un aspecto crucial a considerar en el diseño de este convertidor es analizar la eficiencia global de cada módulo. Al considerar dicho aspecto; se hace énfasis en la importancia de seleccionar los componentes, frecuencias de conmutación, y el número adecuado de módulos para obtener el mejor funcionamiento, eficiencia, y menor costo posible [6].
Para generar las señales de control del inversor de 2k+1 niveles, en este caso k=3 (número de puentes H); se empleó la modulación de multiportadoras [16-18]. Se usa la señal moduladora descrita por la ecuación (1):
Donde: h calcula una señal senoidal; v m , f m y t son la amplitud pico de la señal, la frecuencia moduladora y el tiempo, respectivamente. Además, se usa 2k señales portadoras descritas por la ecuación (2):
donde: g calcula una señal triangular con offset; v c , f c , φ c , n, k y t son la amplitud pico, frecuencia portadora, fase, nivel que se calcula, parámetro del número de niveles del inversor y el tiempo, respectivamente. Para compararlas y así, obtener los estados encendido y apagado que generan cada nivel del inversor.
Los estados de encendido y apagado para los niveles i<k+1; es decir, niveles i=1, 2,…, k, se calculan con la ecuación (3):
los estados para los demás niveles i>k+1; es decir, niveles i=k+2, k+3, …,2k+1 se calculan con la ecuación (4):
La modulación de multiportadoras, permite controlar dos parámetros; el primero, se calcula mediante la ecuación (5):
Donde: mf es el índice de modulación de frecuencia. El segundo parámetro se calcula mediante la ecuación (6):
Donde: ma es el índice de modulación. Por último, el valor de φ c que se elige al calcular los estados de cada nivel se elige acorde a los esquemas:
(i) En disposición de fase IPD: Cada nivel del inversor se calcula con φ c =0. El esquema se muestra en la figura 2.

(ii) Disposición de oposición de fase alternada APOD: Los niveles i<k+1 impares y los niveles i>k+1 impares, se calculan con φ c =180°; los demás con φ c =0°. El esquema se muestra en la figura 3.

(iii) Disposición de oposición de fase POD: Los niveles i<k+1, se calculan con φ c =180°; los demás, con φ c =0 [17,18]. El esquema se muestra en la figura 4.

La implementación del método de modulación, es embebida en el conjunto experimental TMS320F28379D, de Texas Instruments. Se realizó mediante el software SolidThinking Embed 2017.2. El programa trabaja a una frecuencia de muestreo de 120 (kHz). Además, cada valor se representa por una palabra tipo int o scaled int de 32 bits. Se fija los valores v c =1/3 y fm =60. El programa permite cambiar los parámetros de control y esquema de modulación; aún el inversor se encuentre en funcionamiento. La interfaz se muestra en la figura 5.
El inversor de 7 niveles, se compone de tres módulos; cada uno es un puente H y se alimenta con una batería de automóvil de 12 (V).
Se analizó la respuesta del inversor con el analizador de calidad de la energía eléctrica Fluke 43B. El análisis comprende los armónicos desde el 0° hasta el 49°, la forma de onda y la distorsión armónica total THD para múltiples combinaciones de parámetros dadas; i. e. esquema de modulación, mf y ma. Se utilizó FlukeView 3.34 para guardar las mediciones en el ordenador y se desarrolló un programa en Python para procesar, comparar y presentar los datos, para realizar el estudio.
RESULTADOS Y DISCUSIÓN
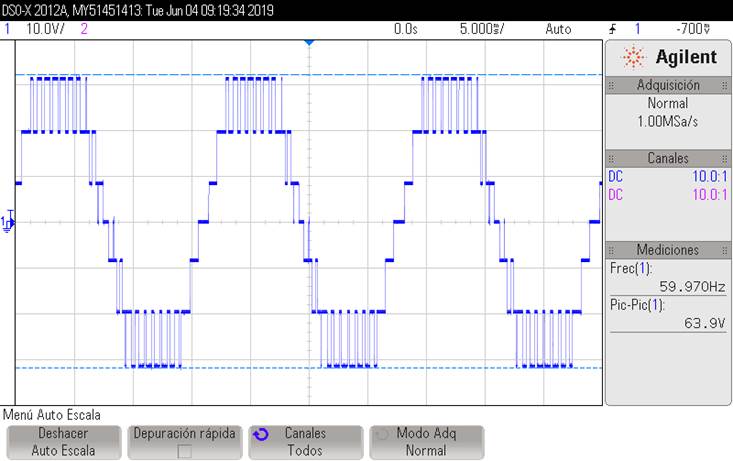
Los resultados experimentales obtenidos para las técnicas de control SPWM descritas, las frecuencias de la señal triangular que se utilizan varían para índices de modulación en frecuencia de mf = (15, 17,……,45) (un conjunto de 16) y el índice de modulación de 0.75 a 0.99. El estudio implica la forma de onda de voltaje obtenido y el contenido armónico. En la figura 6, se muestra la forma de onda del voltaje de salida del inversor visto en el osciloscopio Agilent DSO-X 2012A.
La información obtenida con la herramienta Fluke 43B, se procesa en el programa realizado en Python y comparando los resultados con los mostrados en la pantalla del medidor se observa que son idénticos, con la diferencia de que el programa muestra las condiciones utilizadas para las pruebas realizadas.
Análisis del contenido armónico de los voltajes generados para los métodos SPWM de control utilizados
En esta sección se presentan las gráficas del contenido armónico presente en la señal de voltaje de salida del inversor para los tres métodos de control utilizados.
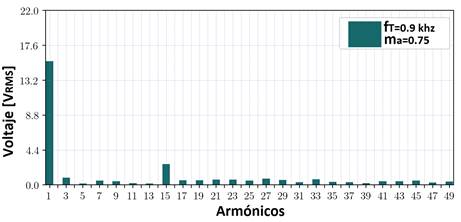
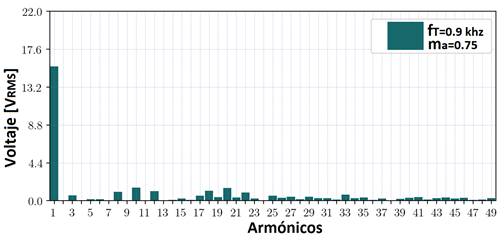
Utilizando la información capturada para el método IPD-PWM, en la figura 7, se muestra el resultado para un índice de mf = 15 que corresponde a una frecuencia portadora de 900 Hz e índice de modulación ma = 0.75. Como puede observarse en el espectro, el armónico más significativo corresponde a 900 Hz para mf = 15 y la distribución de los armónicos muestra que el
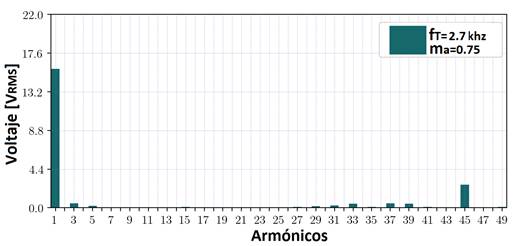
Para el método IPD-PWM, en la figura 8, se muestra el resultado obtenido para un índice de mf = 45 e índice de modulación ma = 0.75 Como puede observarse en el espectro, el armónico más significativo corresponde a 2700 Hz y la distribución de los armónicos muestra que el
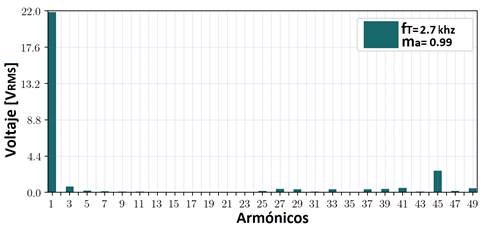
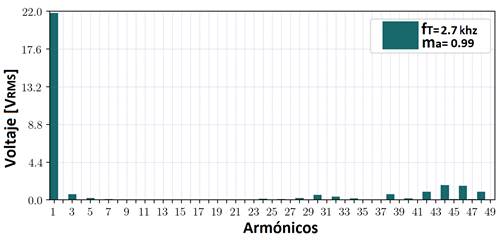
Para el mismo método IPD-PWM y ahora con un índice de modulación en frecuencia de mf = 45 con frecuencia portadora de 2700 Hz e índice de modulación en amplitud ma = 0.99, el resultado se muestra en la figura 9, en donde se puede ver como el resultado de la distribución del contenido de armónicos es consistente ya que están desplazados hacia alta frecuencia, y el primer armónico alcanza su valor más alto, y el armónico correspondiente al índice de modulación en frecuencia es el más significativo.
El procedimiento se repitió para procesar los resultados obtenidos mediante del método de control APOD-PWM. En la figura 10, se muestran los resultados para mf = 15, e índice de modulación ma = 0.75. Con este método se puede observar como el contenido ahora es de armónicos pares y de los impares presentes el tercer armónico es el más significativo. Y estos están distribuidos alrededor de la frecuencia portadora.
Conservando la misma frecuencia de carrier mf = 45 y modificando el índice de modulación ma = 0.99, se realiza el procesamiento de los resultados del contenido de armónico de los voltajes obtenidos. En la figura 11, se muestran los resultados. Con la característica de que los armónicos están distribuidos alrededor de la frecuencia portadora. Similar a los resultados con el método IPD-PWM.
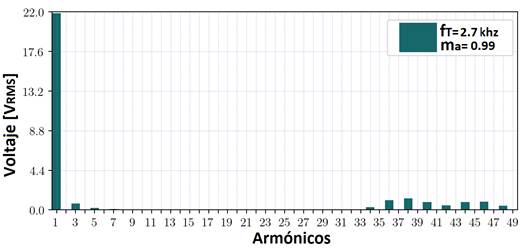
Para el método de generación de las señales de control de disparo POD-PWM se realizaron las pruebas y procesamiento de la información obtenida. En la figura 12, se puede ver el resultado para frecuencia portadora de 900 Hz e índice de modulación ma = 0.75. El contenido de armónicos es par e impar, predominando por su valor los pares.

Finalmente se modifica el índice de modulación ma = 0.99 y al realizar el procesamiento de la información se obtienen los resultados mostrados en la figura 13, En donde se puede observar que la distribución de los armónicos es consistente y aparecen alrededor de la frecuencia portadora.
Al modificar la frecuencia de portadora e índice de modulación, los resultados muestran un comportamiento similar al mostrado para cada método en particular, es decir para IPD-PWM el armónico de mayor magnitud corresponde al de la frecuencia de la portadora utilizada, mientras que para los métodos APOD-PWM y PD-PWM los armónicos más significativos se encuentran alrededor de la portadora.
Distorsión armónica total de los voltajes generados para los métodos SPWM de control utilizados
Para calcular la distorsión armónica total THD, se procesó las mediciones realizadas y se calculó su valor usando la ecuación (7):
Donde V2, V3 son los voltajes armónicos y Vn es el voltaje RMS del armónico n. A partir de lo anterior se realizó el análisis del contenido armónico total, considerando cada frecuencia de portadora e índice de modulación en amplitud utilizado.
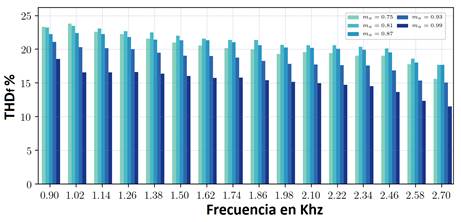
En la figura 14, se muestra el contenido armónico total de la señal de voltaje generado por el inversor al utilizar el método de control por disposición de fase alternada APOD-PWM. En donde se puede observar como el porcentaje del contenido armónico total cambia de acuerdo con los cambios de la frecuencia de la portadora (eje x) y con los cambios del índice de modulación. En las gráficas de resultados individuales se observa que los armónicos más significativos se encuentran cerca de las frecuencias del carrier.
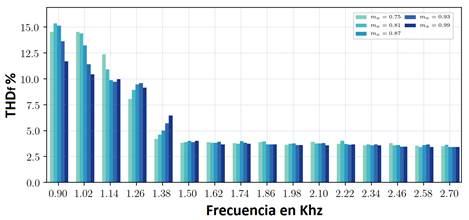
El análisis realizado muestra que a frecuencias portadoras bajas en el espectro utilizado el contenido armónico es mayor con cualquiera de los métodos y que al incrementar la frecuencia del carrier los armónicos se desplazan hacia dicha frecuencia y además disminuyen conforme ésta se va incrementando a la par con el índice de modulación. Si se diseña un filtro pasa altos, que permita eliminar los armónicos de alta frecuencia es posible reducir el contenido armónico total a límites aceptables. Por ejemplo, en la figura 15, se muestra el resultado de filtrar los armónicos de alta frecuencia para el método IPD-PWM mostrando distorsión armónica total aceptable sobre todo para frecuencias de portadora e índices de modulación en amplitud altos.
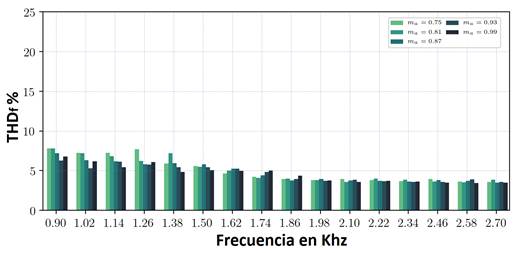
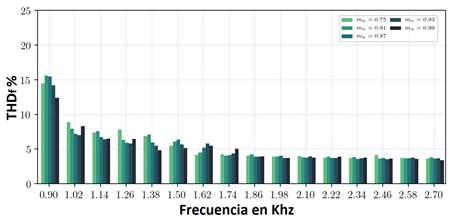
Utilizando el mismo criterio para determinar el contenido de armónico total con los datos obtenidos mediante el método APOD-PWM, utilizando filtro de armónicos de alta frecuencia, en la figura 16, se muestra como el contenido armónico al utilizar un filtro se reduce. En este caso hay que clarificar que se consideraron los armónicos pares en la THD.
Finalmente, para el método POD-PWM se utiliza un filtro de armónicos de alta frecuencia, dando el resultado mostrado en la figura 17. En donde puede observarse como el contenido armónico se reduce a valores aceptables. Además, en el análisis están considerados los armónicos pares.
CONCLUSIONES
De acuerdo con las pruebas realizadas con y para cada método de control SPWM utilizado, se puede concluir lo siguiente: el programa de control aplicado al inversor permite el funcionamiento de conmutación de los dispositivos de potencia de manera adecuada. Los resultados de los análisis muestran que a frecuencias altas de portadora los armónicos más significativos se distribuyen alrededor de dichas frecuencias, a la vez que el valor de los armónicos disminuye tanto para frecuencia como para índices de modulación en amplitud altos. Los tres métodos muestran desempeños aceptables similares a partir de frecuencias portadoras de 1260Hz. Si al sistema se le añade un filtro pasa altos que permita eliminar los armónicos de alta frecuencia, la distorsión armónica total disminuye a valores cercanos al 3% cumpliendo con las normas establecidas, por la IEEE al respecto. Incrementando el número de niveles del convertidor mejora la distorsión armónica. Sin embargo, el procesador digital de señales utilizado debe ser capaz de manejar una gran cantidad de información y finalmente el sistema debe contar con fuentes de corriente directa aisladas con voltaje y número de estas adecuados.

