










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Las cajas de engranajes son ampliamente utilizadas en la industria. Estas, por lo general, están sometidas a un régimen de operación desgastante debido a que operarán a velocidad variable, tienen que hacer cambios de sentido de giro o realizar grandes torques para vencer la carga inercial y pueden estar expuestas a condiciones medio ambientales adversas (por ejemplo, cerca del mar) [1]. Por tal razón, las cajas de engranajes tienden a deteriorarse con más rapidez y frecuencia que otros elementos dentro de un sistema mecánico [2].
Un ejemplo de lo anterior lo revela el estudio realizado en el parque eólico ubicado en Egmondaan Zee, Holanda, donde se puede apreciar que el 55% del tiempo de parada de los aerogeneradores del parque fue causado por fallos en sus cajas de engranajes [2]. Por tanto, se hace necesario disponer de sistemas de monitoreo de la condición (SMC) que permitan detectar defectosen la fase inicial de su formación [3]. Los SMC basados en el análisis de vibraciones son los preferidos para el diagnóstico de las cajas de engranajes porque permiten monitorear la mayoría de los componentes de las cajas de engranajes (ejes, engranes, rodamientos) [4].
Las señales de vibración generadas por los engranajes se pueden analizar por medio de diferentes técnicas. Por una parte, están las técnicas basadas en la obtención de indicadores de la condición (IC) en el dominio del tiempo o la frecuencia. En el dominio del tiempo se han desarrollado IC que estudian las características estadísticas de las vibraciones, como son el valor RMS, el factor de cresta, la razón de energía y los factores FM0, FM4, NA4, M6A y NB4 [4,5]. En el dominio de la frecuencia están el factor de potencia de las bandas laterales [2] y la relación de energía de las bandas laterales [6]. Estos IC no muestran la misma sensibilidad para los diferentes defectosde los pares engranados. Los IC estadísticos en el tiempo tienen una alta dependencia deltorque, la velocidad del sistema y la magnitud del defecto [5]. Los IC espectrales son menos dependientes de la carga y tienen un mejor desempeño siempre que los niveles de interferencia y/o ruido sean bajos. Pero la efectividad de todos estos indicadores disminuye cuando la velocidad de rotación es variable.
En [7] se propone un método sincrónico para detectar automáticamente defectos en pares engranados. A este método en lo adelante se le llamará método automático con tacómetro (MACT). El MACT estima un IC llamado índice
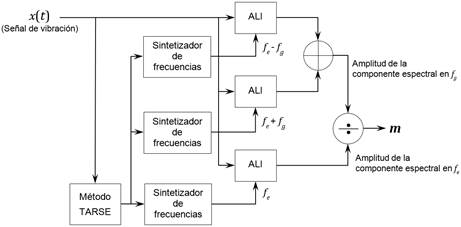
Estos métodos para extraer la velocidad de rotación pudieran ser usados para sustituir el tacómetro utilizado en el MACT. Pero en la implementación de estos métodos es necesario el conocimiento de la velocidad de rotación promedio a priori, lo cual no siempre es posible. Por esta razón, este trabajo tiene como objetivo desarrollar un método para detectar automáticamente defectos en pares engranados cuando la velocidad de rotación es desconocida y variable, sin usar tacómetro. Para alcanzar este objetivo seintegrará elMACTcon un métodopara estimar automáticamente la velocidad de rotación a partir de la señal de vibración generada por un par engranado, el cual se propone en este trabajo.Con esta integración se obtiene un método sincrónico para detectar automáticamente defectos en pares engranados en condiciones de velocidad desconocida yvariable.A este método en lo adelante se le llamará método automático sin tacómetro (MAST).
La clave de este nuevo método es el seguimiento sincrónico de las componentes espectrales características de los pares engranados, lo cual se realiza a través de los ALI. Por otra parte, la estimación automática de la velocidad de rotación se basa en la descomposición en señales monocomponentes de la señal de vibración y el análisis del acoplamiento de fase no cuadrático, el cual, también, se realiza con la ayuda de los ALI.
Métodos y Materiales
A continuación, se mostrarán los métodos usados en este trabajo. Así, como el modelo matemático que se utilizará para simular las señales de vibración.
Señal de vibración de un par engranado
La señal de vibración de un par engranado se puede modelar por la siguiente ecuación 1[7]:
donde
La función de la modulación de amplitud,
donde
La ecuación 1 muestra que la señal de vibración está compuesta por una suma de señales monocomponentes, las cuales están asociadas con los armónicos de la
Aplicación de los ALI en la detección de defectos en engranajes
Los engranajes que presentan defectos en sus dientes tales como escamado, rayado, agrietamiento, fractura, rotura, desgaste corrosivo y picado generan una señal de vibración que se caracteriza por presentar una modulación de amplitud y de frecuencia. Además, se aprecia un aumento en el número y la amplitud de las bandas laterales alrededor de la frecuencia de engranaje [7]. Por tal razón, en [7] se propuso el índice
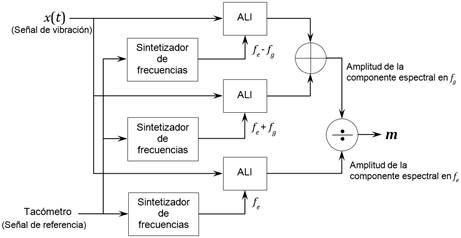
Fig. 1 MACT,donde
El índice
Método para la estimación automática de la velocidad de rotación
El conocimiento de la velocidad de rotación es clave para la detección de defectos en pares engranados, principalmente cuando la velocidad de rotación varía en el tiempo [13]. Por esta razón, se propone un método para estimar la velocidad de rotación de la señal de vibración,generada por un par engranado, de forma automática y sin el uso de tacómetros. Este método solamente requiere la información de los engranajes contenidos en la caja de engranajes.
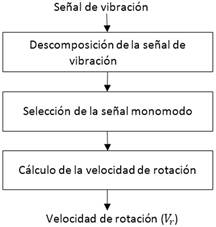
Al método para estimar automáticamente la velocidad de rotación sin tacómetro se le llamó TARSE (Tacholess Automatic Rotational Speed Estimation). Este método consiste en la descomposición de la señal de vibración en señales monocomponentes. Estas señales son analizadas para identificar cuál de ellas presenta una modulación de amplitud cuya portadora sea el armónico fundamental o el segundo armónico de la frecuencia de engranaje del par engranado bajo estudio. Por último, la señal identificada se utiliza para estimar la velocidad de rotación. Este algoritmo consta de tres etapas: una etapa de descomposición, una etapa de selección de la señal monocomponente y una etapa para estimar la velocidad de rotación, como se ilustra en la figura 2.
En la primera etapa del método TARSE se descompone la señal de vibración en señales monocomponentes a través de la Descomposición Singular del Espectro [14]. Entonces, como el sistema incorpora engranajes, algunos de los componentes pueden tener la siguiente forma, ecuación 3 (según la ecuación 1):
El número de componentes obtenidos en esta etapa va a depender del umbral seleccionado para detener el proceso de descomposición y el espectro de frecuencias de la señal de vibración. Por tanto, para diferentes valores del umbral se puede obtener un número diferente de componentes, según el contenido espectral de frecuencias. En este trabajo, se usa un valor inicial de umbral igual a 0.5.
En la segunda etapa se identifica el componente que presenta una modulación de amplitud cuya portadora es la frecuencia de engranaje o su segundo armónico. Para realizar esta identificación, en este trabajo se propone la normalización del coeficiente
donde
Como la velocidad de rotación puede variar en el tiempo no se puede usar la transformada de Fourier para calcular el coeficiente
El nuevo coeficiente toma valores entre 0 y 1. Cuando existe modulación de amplitud el valor calculado tiende a 1 y cuando no existe modulación tiende a 0. Por tanto, la señal monocomponente seleccionada será la que se corresponda con el coeficiente de mayor valor dentro del rango de aceptación
El componente seleccionado se utilizará para estimar la velocidad de rotación, tercera etapa, lo cual se realiza de la siguiente forma:
Primeramente, se demodula en fase la señal monocomponente de la siguiente forma, ecuación 5:
donde
Entonces, la velocidad de rotación (
Detección automática de defectos en pares engranados sin tacómetro
Para calcular el índice
El método TARSE es usado para obtener el ángulo de rotación, el cual se obtiene por medio de la ecuación 5. Así, el ángulo de rotación estimado pertenece a la portadora del componente seleccionado. En esta aplicación del método TARSE no es necesario el uso de las ecuaciones 6 y 7.
El sintetizador de frecuencias que genera la frecuencia de engranaje (frecuencia portadora,
donde
Para la implementación del MASTsolamente es necesario conocer las características mecánicas de los engranes que serán analizados.
Experimentos
El MAST fue validado a través de varios experimentos. En un primer momento se realizaron dos grupos de experimentos usando señales simuladas de vibración y, por último, se realizó un experimento donde se utilizó señales de vibración medidas en dos cajas de engranajes, las cuales son usadas en aerogenerador de 3 MW.
El primer grupo de experimentos con señales simuladas de vibración estuvo orientado a verificar la influencia que tienen la amplitud de las bandas laterales y el ∆v en la estimación del índice
Las nueve señales de vibración se generaron a través de la ecuación 1. Estas señales están compuestas por tres armónicos de la frecuencia de engranaje,
El engrane analizado tiene 32 dientes,
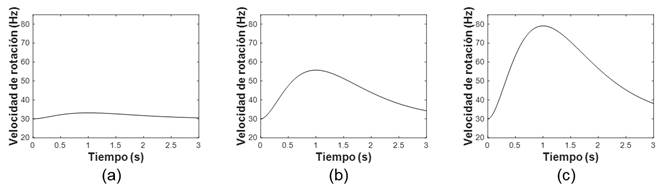
Fig. 4 Perfiles de velocidad de rotación para el primer grupo de experimentos. a) con ∆v del 5 %, b) con ∆v del 30 %, c) con ∆v del 45 %
En la figura 5 se muestran los espectros de frecuencias de la señal de vibración generada para un valor del índice
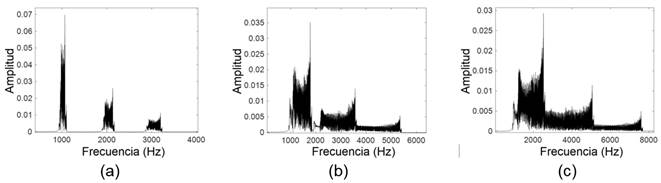
Fig. 5 Espectros de las señales de vibración simuladas para
En ambos grupos de experimentos el índice
Por otra parte, para el experimento con señales reales de vibración se utilizaron dos señales. Una señal de vibración fue mediada en una caja de engranajes, perteneciente a un aerogenerador de 3 MW, que tenía un engrane con un diente roto y la otra fue medida en una caja de engranaje, igual a la anterior, que tenía todos sus engranes en buen estado.
Las mediciones de las señales de vibración se realizaron a una velocidad de rotación nominal de 1800 RPM (30 Hz). La frecuencia de muestreo usada fue de 97656 Hz, con una duración de la señal de 3 s. Además, se obtuvo la velocidad de rotación de la señal de un tacómetro, el cual genera 8 pulsos por vueltas [16]. El engrane defectuoso (engrane de entrada) tiene 32 dientes, por tanto, la frecuencia de engranaje nominal es 960 Hz (32X30 Hz).
En la figura 6a se muestra el espectro de la señal de vibración generada por la caja de engranajes sin defecto (Señal sin Defecto) y en la figura 6b se muestra el espectro de la señal de vibración generada por la caja de engranajes con defecto (Señal con Defecto). En ambas figuras no se puede definir con claridad la componente espectral asociada a la frecuencia de engranaje, ni las componentes espectrales a las frecuencias asociadas a la velocidad de rotación (bandas laterales) debido a la ∆v.
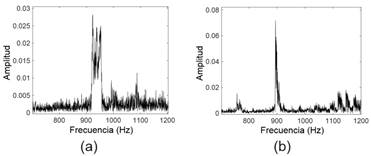
Fig. 6 Espectros de las señales de vibración obtenidas de las cajas de engranajes alrededor de la frecuencia de engranaje. a) sin defecto, b) con defecto
En este experimento, el índice
El procedimiento para la estimación manual del ángulo de rotación consiste en filtrar manualmenteuno de los armónicos de la frecuencia de engranaje y su posterior demodulación en fase. En este trabajo se filtró el primer armónico de la frecuencia de engranaje.
Para todos los experimentos losALIs se implementaron con un filtro paso-bajo del tipo Butterworth de orden 2 y una frecuencia de corte de 0,25 Hz. Los polos del filtro se proyectaron sobre una parábola para reducir la duración de la respuesta transitoria del filtro [7].
Resultados y Discusión
En la tabla 1 se recogen los resultados obtenidosen el primer grupo de experimentos usando señales simuladas de vibración.Estos resultados indican que el MAST logró estimar el índice
Tabla 1 Resultados alcanzados por el MACT y el MAST en el primer grupo de experimentos
| ∆v (%) | Error de estimación del MACT (%) | Error de estimación del MAST (%) | Error de estimación del MAST con respecto al MACT (%) | |||
|---|---|---|---|---|---|---|
| 5 | 0,1 | 0,099 | 0,09891 | 1,0043 | 1,0894 | 0,086 |
| 0,2 | 0,19978 | 0,199795 | 0,1107 | 0,1021 | 0,0066 | |
| 0,5 | 0,49945 | 0,49949 | 0,1102 | 0,1018 | 0,0085 | |
| 30 | 0,1 | 0,10000 | 0,10003 | 0,0003 | 0,0270 | 0,0267 |
| 0,2 | 0,2000 | 0,2001 | 0,00009 | 0,0266 | 0,0265 | |
| 0,5 | 0,5000 | 0,5001 | 0,00008 | 0,0268 | 0,0267 | |
| 45 | 0,1 | 0,0999 | 0,1000 | -0,0005 | 0,0185 | 0,0190 |
| 0,2 | 0,1999 | 0,2000 | -0,0003 | 0,0199 | 0,0202 | |
| 0,5 | 0,4999 | 0,5001 | -0,00005 | 0,0211 | 0,0212 |
Posteriormente, se realizó el segundo grupo de experimentos. En este grupo de experimentos se añadió ruido a las señales de vibración generadas en el primer grupo de experimentos, para lograr SNR de 25 dB, 15 dB, 5 dB y 0 dB. En este grupo de experimentos, el índice
La primera prueba fue realizada para una SNR= 25 dB. En este experimento se logró estimar el índice
Tabla 2 Resultados alcanzados por el MACT y el MAST en el segundo grupo de experimentos con SNR= 25 dB
| ∆v (%) | Error de estimación del MACT (%) | Error de estimación del MAST (%) | Error de estimación del MAST con respecto al MACT (%) | |||
|---|---|---|---|---|---|---|
| 5 | 0,1 | 0,0999 | 0,0998 | -0,0641 | -0,1638 | -0,0998 |
| 0,2 | 0,20005 | 0,19999 | 0,0238 | -0,0072 | -0,0310 | |
| 0,5 | 0,49995 | 0,49974 | -0,0094 | -0,0525 | -0,0432 | |
| 30 | 0,1 | 0,1000 | 0,0999 | 0,000085 | -0,0535 | -0,0535 |
| 0,2 | 0,2000 | 0,1999 | 0,0063 | -0,0471 | -0,0535 | |
| 0,5 | 0,5000 | 0,4996 | 0,0048 | -0,0721 | -0,0769 | |
| 45 | 0,1 | 0,1000 | 0,0998 | -0,0457 | -0,1908 | -0,1450 |
| 0,2 | 0,2001 | 0,1998 | 0,0297 | -0,1186 | -0,1482 | |
| 0,5 | 0,5000 | 0,4991 | 0,0019 | -0,1747 | -0,1767 |
Nuevamente, el experimento se repitió con una SNR= 15 dB. En este experimento, también, se logró estimar el índice
Tabla 3 Resultados alcanzados por el MACT y el MAST en el segundo grupo de experimentos con SNR= 15 dB
| ∆v (%) | Error de estimación del MACT (%) | Error de estimación del MAST (%) | Error de estimación del MAST con respecto al MACT (%) | |||
|---|---|---|---|---|---|---|
| 5 | 0,1 | 0,1000 | 0,0997 | 0,0488 | -0,2854 | -0,3342 |
| 0,2 | 0,2001 | 0,1993 | 0,0615 | -0,3487 | -0,4098 | |
| 0,5 | 0,5004 | 0,4976 | 0,0830 | -0,4810 | -0,5635 | |
| 30 | 0,1 | 0,1001 | 0,0993 | 0,0660 | -0,7269 | -0,7912 |
| 0,2 | 0,1999 | 0,1984 | -0,0494 | -0,8243 | -0,7751 | |
| 0,5 | 0,4999 | 0,4948 | -0,0290 | -1,0400 | -1,0113 | |
| 45 | 0,1 | 0,0999 | 0,0983 | -0,1481 | -1,6542 | -1,5073 |
| 0,2 | 0,2005 | 0,1974 | 0,2430 | -1,2735 | -1,5124 | |
| 0,5 | 0,4998 | 0,4899 | -0,0443 | -2,0254 | -1,9818 |
El experimento se repitió con una SNR= 5 dB, bajo esta nueva condición se logró estimar el valor de
Tabla 4 Resultados alcanzados por el MACT y el MAST en el segundo grupo de experimentos con SNR = 5 dB
| ∆v (%) | Error de estimación del MACT (%) | Error de estimación del MAST (%) | Error de estimación del MAST con respecto al MACT (%) | |||
|---|---|---|---|---|---|---|
| 5 | 0,1 | 0,0995 | 0,0968 | -0,5000 | -3,1837 | -2,7136 |
| 0,2 | 0,1994 | 0,1939 | -0,3245 | -3,0572 | -2,7461 | |
| 0,5 | 0,4996 | 0,4785 | -0,0788 | -4,2904 | -4,2139 | |
| 30 | 0,1 | 0,1011 | 0,0939 | 1,1439 | -6,0808 | -7,1342 |
| 0,2 | 0,2004 | 0,1847 | 0,1952 | -7,6631 | -7,8429 |
El último experimento del segundo grupo de experimentos se realizó con una SNR de 0 dB. En esta prueba solamente se logró estimar el índice
Tabla 5 Resultados alcanzados por el MACT y el MAST en el segundo grupo de experimentos con SNR = 0 dB
| ∆v (%) | Error de estimación del MACT (%) | Error de estimación del MAST (%) | Error de estimación del MST con respecto al MACT (%) | |||
|---|---|---|---|---|---|---|
| 5 | 0,1 | 0,1004 | 0,09008 | 0,3754 | -9,1964 | -9,5209 |
| 0,2 | 0,2012 | 0,1822 | 0,6151 | -8,8907 | -9,4120 | |
| 0,5 | 0,5048 | 0,4303 | 0,1614 | -13,9388 | -14,0533 |
Finalmente, se muestran los resultados obtenidos en el experimento con señales reales de vibración. Los resultados obtenidos por los diferentes métodos se muestran en la tabla 6. En esta tabla se puede observar que los tres métodos logran identificar el defecto, debido a que el valor de
Conclusiones
El método propuesto puede ser usado para detectar eficazmente defectos en pares engranados cuando la velocidad de rotación es desconocida y presenta variaciones de hasta un 30 % aproximadamente,incluso cuando la señal de vibración tiene una SNR baja. El método también se muestra efectivo en presencia de defectos incipientes, es decir, cuando el índice

