










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
La biodiversidad albergada en los ecosistemas forestales produce una serie de servicios ambientales tangibles e intangibles para la sociedad. Su preservación es fundamental para el mantenimiento de sus servicios, como la producción de alimentos, captura de carbono, mitigación del calentamiento global, captación y filtración de agua entre otros (Martínez-Garza, et al., 2021). El papel de la cobertura forestal mundial es crucial para mitigar los efectos del calentamiento global. En este sentido, el Panel Intergubernamental sobre el Cambio Climático (IPCC, por sus siglas en inglés), establece que la cobertura forestal mundial tiene la capacidad de absorber el 25% del CO2 atmosférico necesario para limitar el calentamiento global (Rogelj, et al., 2018).
Desafortunadamente, las estrategias de conservación no han logrado ser efectivas para evitar la deforestación y degradación de la cobertura forestal. A nivel mundial se estima que las tasas de deforestación van desde 365,000 hasta más de 1,500,000 ha por año (Organización de las Naciones Unidas para la Alimentación y la Agricultura, 2020). Parte de este fracaso es causado por la inadecuada ubicación de áreas destinadas para la protección de ecosistemas y especies en riesgo, puesto que su diseño es una parte fundamental para lograr que la conservación sea efectiva y eficiente (Johnson, et al., 2017). Sin embargo, los procesos de diseño y selección de sitios de protección de la naturaleza se han caracterizado por carecer de una planificación sistemática. En México y a nivel mundial se ha utilizado principalmente el criterio ad hoc para establecer áreas de protección. Esta práctica consiste en seleccionar sitios no aptos para la agricultura, el desarrollo urbano o de poco valor comercial para decretarlos como sitios de conservación (Ceballos, 2007). En el corto plazo funcionan para alcanzar objetivos de la agenda político-ambiental. Aunque en realidad son sitios que no tienen importancia para la conservación de la biodiversidad.
El establecimiento de áreas de protección en México se define legalmente como Áreas Naturales Protegidas (ANP) y en las últimas dos décadas han aumentado considerablemente. Actualmente, existen 183 ANP con diferentes categorías de manejo que en su conjunto conservan el 10.93% del territorio terrestre nacional (México. Comisión Nacional de Áreas Naturales Protegidas, 2022). Para el estado de Puebla se tienen 19 ANP, siete con decreto federal y 12 estatal, que en total conservan el 10% de la superficie estatal. A pesar de contar con cifras de más del 10% de superficie conservada, tanto a nivel nacional como estatal, en su mayoría no existe evidencia documentada del proceso de diseño y de los criterios utilizados para definir los sitios donde se establecieron las ANP. Esto ocurre a pesar de existir metodologías y herramientas especializadas con gran potencial para el diseño de áreas de conservación eficientes (Cantú et al., 2003; Watts et al., 2017).
Desde un enfoque geográfico se han desarrollado herramientas y metodologías con gran potencial para el diseño y evaluación de sitios de conservación eficientes, incluidos en el enfoque de planeación sistemática de la conservación. El algoritmo MARXAN (Watts et al., 2017) y la metodología del análisis gap (Urquiza-Haas, et al., 2009) se han desarrollado dentro de este enfoque para identificar y evaluar áreas de protección respectivamente. En cuanto a la identificación de sitios potenciales para la conservación, el algoritmo de selección funciona bajo el principio de complementariedad. Es decir, toma en cuenta las áreas destinadas a la conservación y ubica nuevas áreas prioritarias de conservación, con el objetivo de alcanzar las metas de conservación en una red de reservas. Por otra parte, el análisis GAP se utiliza para evaluar la representatividad ecológica de una red de áreas de conservación. Esta evaluación usa como parámetro de referencia la distribución geográfica de una especie o ecosistema que se ubica dentro de una red de sitios de conservación. Frecuentemente, se considera adecuado que entre el 12% y el 17% del total de su distribución se ubique dentro de un sistema de ANP (Neri-Suárez, et al., 2015; Chowdhury, et al., 2022). De acuerdo con las nuevas metas globales de conservación proyectadas por el Convenio sobre la Diversidad Biológica (CBD) se pretende que para 2030 se cubra el 30% de las zonas terrestres y marinas del mundo. Esto implica que se deberán decretar sistemas ecológicamente representativos y bien conectados de áreas protegidas.
El incremento de la red de áreas naturales protegidas debe ser un proceso sistemático de configuración territorial, que evite asignar zonas de poca relevancia para la biodiversidad y contribuya a evitar conflictos socioambientales (Luna-Nemecio, 2021; Pressey, et al., 2021). En este sentido, es frecuente que las áreas de conservación sean decretadas bajo criterios arbitrarios que se sobreponen a otros usos del suelo. Esta situación puede ser mitigada a través de procesos de consulta ciudadana y criterios científicos de selección, que aporte elementos a los agentes tomadores de decisiones para el correcto establecimiento de áreas de conservación, ya sean ANP u otras estrategias de conservación in situ. Una ventaja que se obtiene al aplicar un proceso de planeación sistemática de la conservación, es que se opera bajo criterios de selección transparentes, integrales y bien argumentados para que la conservación in situ sea efectiva y eficiente (Adams, et al., 2019).
En este contexto, el presente estudio muestra la aplicación de algoritmos de optimización especializados en la selección eficiente de sitios potenciales para ser incluidos en la red de áreas protegidas del estado de Puebla, México. Se utilizan a los ecosistemas forestales presentes en el estado como indicadores de biodiversidad para evaluar e identificar áreas de conservación desde un enfoque geográfico. Este método resulta útil, en términos de costo, sobre todo cuando existe un vacío de conocimiento sobre el estado de la biodiversidad de un área determinada.
Materiales y métodos
El algoritmo de selección de reservas MARXAN, utiliza un identificador numérico para clasificar cada tipo de uso de suelo. A partir de esta clasificación selecciona las áreas que se consideran disponibles para la conservación. Con este fin, la superficie del estado de Puebla se clasificó en: a) áreas disponibles para la conservación, definidas como unidades de planificación hexagonales (UP); b) áreas con protección actual (ANP); y c) áreas perturbadas donde se incluyen las zonas urbanas y agricultura de riego. Además de las carreteras de dos carriles, con un buffer de 25 metros, carreteras de cuatro, cinco y seis carriles, con un buffer de 50 m (Figura 1).
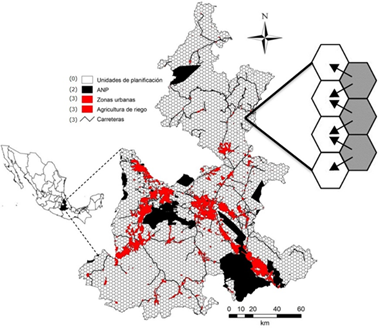
Fig. 1 - Configuración de la superficie del estado de Puebla de acuerdo al tipo de uso de suelo para la ejecución del algoritmo MARXAN. Se asignó un identificador numérico a cada tipo de uso: unidades de planificación = 0; red de ANP actual = 2; y áreas perturbadas.
La configuración de unidades de planificación de forma hexagonal dentro del territorio, permite obtener un perímetro inferior a la proporción de área y un número mayor de bordes en cada unidad de planificación. En conjunto con un valor óptimo de BLM, ayuda a encontrar soluciones eficientes y menos fragmentadas para una red de sitios de conservación. Por tal motivo se dividió el territorio del estado de Puebla en 3,489 unidades de planificación de forma hexagonal de 10 km2, lo que representa el 82.02% del territorio del estado. Este arreglo de las UP dentro del territorio en conjunto con un valor óptimo de BLM, ayuda a obtener soluciones con un adecuado balance entre costo y longitud de frontera.
Se utilizó la cartografía digital de 17 tipos de vegetación (México. Instituto Nacional de Estadística y Geografía, 2021) a escala 1:250,000 para identificar y delimitar los ecosistemas forestales presentes en el estado de Puebla. Esta información cartográfica se generó a partir de criterios biológicos e imágenes de percepción remota con verificaciones de campo para su clasificación. El sistema de ANP analizado en este estudio está constituido por siete ANP con decreto federal y 12 con decreto estatal. Este sistema de ANP se integró a partir de la información cartográfica digital obtenida de la Comisión Nacional de Áreas Naturales Protegidas (México. Comisión Nacional de Áreas Naturales Protegidas, 2022).
Se utilizó la metodología del análisis gap para determinar los vacíos y omisiones de conservación de los ecosistemas forestales en el sistema de ANP (Urquiza-Hass, et al., 2009). Este análisis se desarrolló en el Sistema de Información Geográfica ArcMap 10.1 donde, para calcular las superficies presentes de los ecosistemas forestales en ANP, se realizó una superposición de mapas digitales de los tipos de vegetación y el sistema de ANP. Se definió como vacío de conservación a todos los ecosistemas forestales no presentes en el sistema de ANP. En las omisiones de conservación, se empleó esta definición para los elementos de conservación presentes en ANP por debajo de su meta de conservación. Estas metas de conservación se determinaron a partir del promedio de las metas individuales de conservación de los tipos de vegetación en condición primaria y secundaria, generadas por Urquiza-Haas, et al. (2009), basadas en su importancia ecológica a nivel nacional.
La selección de nuevas áreas para la conservación es una etapa importante dentro del proceso de planificación sistemática de la conservación. Para este fin, existen diversos métodos y herramientas que orientan a los tomadores de decisiones a elegir sitios eficientes y efectivos para la conservación. Una de las herramientas más usadas es el programa MARXAN v1.8 (Watts et al., 2017), que ejecuta algoritmos heurísticos de optimización que minimizan una función objetivo para identificar conjuntos de áreas que cumplan con las metas cuantitativas de conservación. Esta herramienta utiliza, en primera instancia, el algoritmo templado simulado seguido del algoritmo de mejoramiento iterativo. Ambos procesan la información de la distribución de los 17 tipos de vegetación con sus respectivas restricciones definidas por el usuario. Su objetivo es identificar conjuntos de áreas potenciales para la conservación y seleccionar el conjunto más eficiente, en términos de costo, y efectivo para la conservación.
El algoritmo MARXAN consiste en una función matemática que calcula el valor de un conjunto de unidades de planificación (UP) seleccionadas en una solución espacial (Ecuación 1). A través de un proceso iterativo, el programa busca minimizar la función objetivo, considerando tres factores: 1) penalidad por omisión de tipos de vegetación (SPF, por sus siglas en inglés); 2) el modificador de frontera (BLM, por sus siglas en inglés); y 3) el umbral de costo.

El costo total y el umbral de costo son variables medidas en área (km2), y la longitud de frontera en kilómetros. El factor de penalidad por omisión se otorga cuando un tipo de vegetación no alcanza la meta de conservación. Este factor de penalidad se estableció en 1 000, un valor relativamente alto para garantizar que se cumplan las metas de la mayoría de los objetos de conservación. Así mismo, sucede con el umbral de costo, al que se le asigna una penalidad cuando excede el área preestablecida. En este estudio se planteó un escenario sin restricción de costo (tiempo), por lo tanto, la penalidad del umbral no fue considerada.
Para encontrar el punto óptimo del valor de BLM, se procedió realizar una calibración en el programa “Zonae Cogito” (Watts et al., 2017) en un rango de 25 valores entre cero y 100. Además, se utilizaron los parámetros del algoritmo templado simulado fijado en 1,000 ejecuciones con 1,000,000 de iteraciones para cada una de las corridas. Se determinó que el valor apropiado de BLM está en el punto de 12.50, donde se encuentre un balance entre la longitud de frontera y su área total (Figura 2).
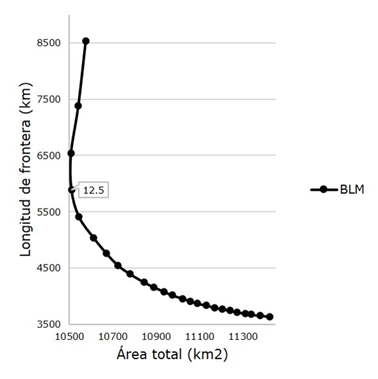
Fig. 2 - El punto óptimo del valor de BLM entre área total y longitud de frontera se obtuvo en 12.50. En el gráfico se observa que a medida que aumenta el valor de BLM se tiene un incremento en el área total y una disminución en la longitud de frontera.
Al minimizar la función objetivo y el valor de BLM se obtiene como resultado una selección de unidades de planificación con un costo mínimo, en términos de área, que cumplen con las metas de conservación de los tipos de vegetación.
La configuración del algoritmo templado simulado se fijó en 1,000 ejecuciones, el cual inicialmente genera de forma aleatoria una red de áreas potenciales para la conservación, a la que posteriormente se ejecuta el algoritmo de mejoramiento iterativo, con 1,000,000 de iteraciones. Este algoritmo hace cambios aleatorios de manera iterativa, agregando o eliminando unidades de planificación.
De tal modo que cada solución nueva es evaluada con la solución previa y solo se mantiene la mejor de acuerdo a la minimización de la función objetivo. Este proceso continúa de forma iterativa hasta encontrar una solución óptima o sub-óptima. El primer resultado del algoritmo de selección es una clasificación de prioridades (media, alta y muy alta) de cada unidad de planificación en la conservación de ecosistemas forestales. En el segundo resultado se obtiene una selección de la menor área y la mayor conectividad ecológica estructural, con la que se alcanzan todas las metas de conservación para cada ecosistema. Los sitios con uso de suelo agrícola, urbano y carreteras fueron excluidos por el algoritmo de selección (Figura 1).
Resultados y discusión
En el análisis gap se obtuvo que, de los 17 ecosistemas forestales presentes en el estado de Puebla, en cuatro se cumple la meta de conservación en el sistema de ANP. Así mismo, se encontró que 13 ecosistemas presentaron un déficit de conservación; nueve son omisión de conservación y cuatro son vacíos de conservación (Tabla 1).
Tabla 1 - Estatus de la representatividad ecológica en el actual sistema de Áreas Naturales Protegidas del Estado de Puebla.
| Ecosistema forestal | Superficie en Puebla (ha) | Superficie en ANP (%) | Meta de conservación (%)1 | Estatus actual de conservación |
|---|---|---|---|---|
| Bosque de mezquite | 2,428 | 70 | 35 | Representado |
| Bosque de oyamel | 17,054 | 8 | 95 | Omisión |
| Bosque de pino | 173,887 | 11 | 15 | Omisión |
| Bosque de táscate | 14,672 | 31 | 95 | Omisión |
| Bosque encino | 144,529 | 24 | 15 | Representado |
| Bosque encino pino | 18,460 | 5 | 38 | Omisión |
| Bosque mesófilo de montaña | 98,091 | 6 | 95 | Omisión |
| Bosque pino encino | 123,714 | 2 | 15 | Omisión |
| Chaparral | 37,312 | 27 | 90 | Omisión |
| Matorral crasicaule | 85,076 | 60 | 80 | Omisión |
| Matorral desértico rosetófilo | 127,639 | 29 | 5 | Representado |
| Pastizal halófilo | 21,344 | 0 | 70 | Vacío |
| Pradera de alta montaña | 4,797 | 100 | 99 | Representado |
| Selva alta perennifolia | 49,743 | 0 | 65 | Vacío |
| Selva baja caducifolia | 564,253 | 8 | 15 | Omisión |
| Selva baja espinosa caducifolia | 68 | 0 | 90 | Vacío |
| Selva mediana subcaducifolia | 1 | 0 | 90 | Vacío |
En relación con las metas de conservación establecidas para los ecosistemas forestales, en las ANP del estado de Puebla, a pesar de cubrir un área del 9.7% de su territorio, se tiene importantes vacíos y omisiones de conservación. Esto indica que la efectividad de la red de ANP en la representación de los tipos de vegetación relevantes para la conservación es deficiente. Otros estudios realizados en México, a nivel estatal, donde utilizaron la vegetación como indicador de biodiversidad reportaron considerables vacíos y omisiones de conservación de ecosistemas forestales similares a los encontrados en este estudio (Cantú et al., 2003; Neri-Suárez, et al., 2018). Entre ellos se destacan los bosques de coníferas, selvas caducifolias, el pastizal halófilo y el matorral desértico rosetófilo. Esto se atribuye a que, en su mayoría, el establecimiento de ANP tiene un sesgo hacia zonas montañosas, de baja productividad agrícola, no aptas para el desarrollo urbano y sitios que no contribuyen a la conservación de la biodiversidad (Cantú, et al., 2003; Ceballos, 2007). Este resultado sugiere que las ANP del estado, en su mayoría, se han establecido con criterios Ad hoc (Pressey, et al., 2021), más que utilizando métodos de diseño de áreas de conservación eficientes, los cuales son poco utilizados por los planeadores de la conservación a nivel estatal y nacional.
En la definición de las metas de conservación en este estudio se utilizó el enfoque metodológico utilizado por Urquiza-Haas, et al. (2009), basado en la importancia ecológica de la vegetación. Lo anterior se debe a que las metas de conservación del 10% y 12% utilizadas a menudo como umbral para evaluar la representatividad en ANP han sido desestimadas por considerarse metas de conservación arbitrarias. Si bien, se desconoce la contribución en este estudio de las metas de conservación en el mantenimiento de poblaciones viables, estas pueden ser una aproximación para garantizar la conservación a largo plazo de los objetos analizados, más aún en un escenario con escasa información sobre la biodiversidad.
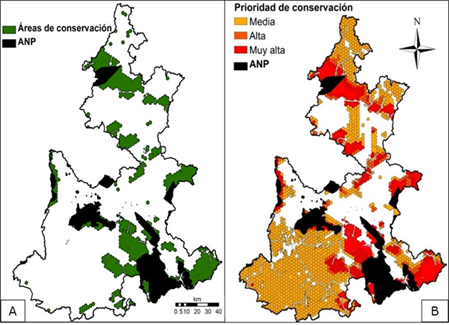
Fig. 3 - Distribución espacial de las prioridades de conservación para los ecosistemas forestales del estado de Puebla (A); y la ubicación de áreas prioritarias para la conservación de ecosistemas forestales (B).
Durante el proceso de selección de unidades de planificación, realizado por el algoritmo de optimización, en cada corrida se eligen las unidades que contribuyen a obtener un diseño de reservas eficiente, es decir, que alcance las metas de conservación para cada elemento bajo las restricciones establecidas. Un valor relativamente alto de iteraciones contribuirá a obtener un patrón espacial consistente de la frecuencia de selección de cada unidad de planificación, es por ello que se utilizaron 1,000 ejecuciones. Al finalizar este procedimiento ejecutado en MARXAN, se obtienen dos resultados. El primero es el resultado de la minimización de la función objetivo ejecutada por los algoritmos de optimización. Se muestra en un mapa el conjunto de UP seleccionados, las cuales representan un escenario potencial para la extensión y ubicación de áreas de conservación (Figura 3-A). En este escenario se obtuvo la mayor eficiencia en términos de área y efectivo para las metas de conservación de cada objeto.
El segundo resultado es la frecuencia de selección, donde se representa las veces que se eligió una unidad de planificación en el proceso de iterativo. La frecuencia de selección, es utilizada en este escenario, para el establecimiento de prioridades de cada UP en la conservación, que en su conjunto muestran las áreas prioritarias para la conservación. Los valores de la frecuencia de selección oscilan entre un rango de uno a 1,000. Partiendo de este rango en un orden ascendente, se realiza una clasificación de las UP en medio, alto y muy alto de acuerdo a su contribución en la conservación (Figura 3-B). Las UP seleccionadas frecuentemente, de valor alto, tienen mayor probabilidad de ser requeridas en una red de reservas eficientes, mientras que las de menor frecuencia son de menor prioridad, ya que los objetos de conservación que contienen pueden encontrarse en otras UP.
El resultado del algoritmo muestra un escenario donde se incrementaría la superficie de conservación en el estado del 10% al 18% (Figura 2-A). Además, su diseño favorece la conectividad estructural entre el actual sistema de ANP y las áreas de conservación seleccionadas. Este diseño puede favorecer las dinámicas ecológicas entre hábitats, incluso en la disminución de los efectos borde y de desplazamiento derivados de la fragmentación.
En estudios previos se ha sugerido el aumento de las áreas de conservación en Puebla debido a la presencia de especies endémicas y/o en categoría de riesgo en el territorio. Es plausible que la concentración de biodiversidad se debe a la convergencia de tres provincias fisiográficas: la Llanura Costera del Golfo de México, la Sierra Madre Oriental y el Eje Neovolcánico Transversal (Tenorio-Mendoza, et al., 2019). Por ejemplo, Sánchez-Cordero, et al. (2005), utilizaron un algoritmo basado en los principios de rareza y complementariedad con el cual ubicaron en la zona central del estado de Puebla áreas prioritarias de conservación y corredores biológicos trazados de este a oeste en la zona. Otra propuesta de corredor biológico se ha diseñado con base a la distribución potencial de Panthera onca como especie sombrilla, donde Puebla es el punto estratégico para la conectividad ecológica entre la Sierra Madre Oriental y la Sierra del Norte de Oaxaca-Mixe (Rodríguez-Soto, et al., 2013). Por otro lado, Ceballos (2007), en su estudio destaca la importancia de implementar ANP para la conservación de mamíferos endémicos en la zona oriental del estado de Puebla. Además, otros estudios de escala regional han propuesto el establecimiento de áreas de conservación. En los estados colindantes de Veracruz y Oaxaca, se identificaron áreas de conservación, adicionales a las existentes, de aproximadamente el 30% de la superficie en cada estado (México. Comisión Nacional para el Conocimiento y Uso de la Biodiversidad, 2020). Las áreas seleccionadas por el algoritmo de optimización muestran que son aptas para la protección de ecosistemas forestales y, por ende, el hábitat de diversas especies que se distribuyen en el territorio.
Conclusiones
En el análisis de las áreas de conservación del estado de Puebla, se encontró que se requiere incrementar la superficie actual de conservación en el estado, del 10% al 18% para lograr que los 13 ecosistemas forestales estén ubicados en sitios destinados a la conservación. Con el uso del algoritmo de optimización se logró seleccionar la menor superficie posible, a pesar de que el 64% del territorio estatal resultó ser relevante para la conservación. De tal forma se demostró que la utilización de algoritmos de optimización espaciales, permite ubicar de forma eficiente, explícita y transparente las áreas que son importantes para la conservación.
Se espera que la política ambiental, nacional e internacional, se dirija hacia el aumento en la superficie de áreas de conservación, ya que son fundamentales para el desarrollo sustentable. En consecuencia, se requerirá emplear metodologías y herramientas de la planeación sistemática de la conservación para garantizar que la conservación in situ sea eficiente y efectiva. Así mismo, se deberá valorar estrategias de conservación que han surgido a partir del consenso y participación de los pobladores locales. Por ejemplo, las unidades de manejo para la conservación de la vida silvestre (UMA) y el pago por servicios ambientales (PSA). Otros esquemas alternativos de conservación son el manejo forestal comunitario y las áreas de conservación comunitarias. Son opciones basadas en la valoración económica que fomentan la conservación. Su implementación rompe con los esquemas de las políticas top-down usadas tradicionalmente para el establecimiento de ANP y favorecen en el éxito de los proyectos de conservación de ecosistemas y sus servicios ambientales.

