










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. - INTRODUCCIÓN
El desarrollo de nuevas tecnologías y aplicaciones de radio durante los últimos años ha traído consigo el agotamiento de las bandas de frecuencia de interés práctico para las comunicaciones de radio. El espectro radioeléctrico es asignado mediante licencias otorgadas por agencias reguladoras que destinan diferentes bandas de frecuencia para tecnologías o servicios específicos. Esta asignación es realizada de manera fija, solo se exceptúan un pequeño conjunto de bandas de frecuencias como la banda ISM (Industrial Scientific and Medical) en la cual los dispositivos no deben causar interferencia perjudicial a otros usuarios y deben aceptar cualquier interferencia recibida. En adición, estudios recientes demuestran que el uso del espectro no es homogéneo ni eficiente [1]; aunque algunas bandas como las de radiodifusión celular están congestionadas en la mayoría de las regiones, otras como las de radioaficionados y las de televisión quedan subutilizadas.
La actual insuficiencia de las políticas de asignación de espectro sugiere el uso de una tecnología de comunicación que permita utilizar el espectro de radio de un modo más exhaustivo, inteligente y flexible. Propuesta por Mitola en [2], la radio cognitiva es una tecnología que representa un paradigma en la evolución de la forma en que es explotado actualmente el espectro radioeléctrico en aras de mejorar la disponibilidad del mismo.
En una red radio cognitiva (CRN, Cognitive Radio Networks) hay dos tipos de usuarios: usuarios primarios (UP), que poseen licencias para disponer exclusivamente de las bandas del espectro asignadas, y usuarios secundarios (US) que exploran las bandas de frecuencia en busca de canales sin actividad de UP para hacer un uso oportuno de los mismos. El proceso en el que los radios de dos o más US se encuentran y establecen un vínculo de comunicación en un mismo canal reconocido como disponible, es llamado rendezvous [3].
Numerosas estrategias han sido elaboradas para lograr el rendezvous entre dos US, algunas de ellas [4-6] proponen la utilización de un canal de control común (CCC, Common Control Channel). Aunque esta propuesta es la más simple es muy susceptible a la congestión [7], por ello en los últimos años han sido desarrollados algoritmos de rendezvous sin el empleo del CCC, que son conocidos como algoritmos de rendezvous ciego [8]. Una solución típica al problema del rendezvous ciego es el uso de secuencias de salto de canal (CH, Channel Hopping) [6]. En este caso cada usuario cognitivo identifica el conjunto de canales disponibles y salta a través de los mismos hasta coincidir con alguno de sus vecinos.
Para completar el rendezvous, además de seleccionar un canal comúnmente disponible e informar mutuamente que van a utilizar este canal para la comunicación [9], los US deben intercambiar información de control. La duración necesaria del intercambio de los mensajes de control depende de la estrategia de señalización que implementen los US y se define por la variable τ [10] (por ejemplo en el estándar 802.22 que norma el uso de las CRN se propone τ=10 ms). En este tiempo los US reservan un intervalo para la detección y así descubren los canales que no están siendo utilizados por los UP. Basado en los resultados de la detección los US acceden a dichos canales de manera oportuna sin interferir con los UP. Al final, el receptor envía un reconocimiento (ACK, Acknowledgement) al transmisor si la transmisión de paquetes en el canal tiene éxito [11]. Considerando como τ el tiempo necesario para completar el rendezvous y teniendo en cuenta que el sincronismo entre los usuarios secundarios no es factible, se demuestra en [12] que la duración de cada ranura de tiempo debe ser 2τ para garantizar que la superposición entre dos ranuras de tiempo sea suficiente para completar el rendezvous. Así, después de seleccionado un canal disponible e intercambiada la información de señalización, los US pueden enviar datos entre sí.
Tradicionalmente el tiempo de rendezvous (TTR, Time To Rendezvous) ha sido la principal métrica empleada para evaluar el desempeño de los algoritmos de rendezvous. Gran parte de los trabajos enfocados en el diseño de estos algoritmos [7,13-15] consideran el TTR como el número de ranuras de tiempo necesarias para que dos US coincidan en un mismo canal. Otros autores [16,17] han evaluado el TTR en unidades de tiempo, con lo cual también consideran la efectividad del mecanismo de señalización empleado. En esta investigación no se hace distinción con relación a los mecanismos de señalización, en consecuencia el TTR será evaluado según la definición presentada en [7] como el número de ranuras de tiempo necesarias para encontrar un canal común después que todos los US han comenzado su secuencia de CH.
El TTR tiene un comportamiento aleatorio debido a que las secuencias de CH en la mayoría de los sistemas prácticos no se inician simultáneamente. Además, el conjunto de posibles valores que puede tomar el TTR está estrechamente relacionado con el algoritmo seleccionado para generar la secuencia de CH. En adición, la variable aleatoria TTR se caracteriza por su valor esperado (ETTR, Expected TTR) y su valor máximo (MTTR, Maximum TTR). Estas son métricas comúnmente empleadas para evaluar el desempeño de los algoritmos de rendezvous y expresan el número de ranuras de tiempo promedio o máximo que los US necesitan saltar antes de que puedan encontrarse en un canal común que se encuentre disponible [18].
Otro aspecto a tener en cuenta para caracterizar estos algoritmos es la posibilidad de establecer el rendezvous entre más de dos usuarios secundarios. En [7,15] se considera que una vez que dos US consiguen el rendezvous intercambian la información necesaria para sincronizar sus secuencias de CH y a partir de este momento generan las mismas secuencias de salto de canal. Este proceso se repite hasta conseguir el rendezvous entre todos los usuarios de la CRN.
La ocurrencia de errores en la exploración del espectro y las diferencias en la posición geográfica de cada US con respecto a los UP trae consigo que el conjunto de canales disponibles identificados por cada US pueda ser diferente. Esto, unido a la operación de reemplazo, hace que esta estrategia de rendezvous por pares falle bajo determinadas condiciones. La operación de reemplazo hace que en algunas ranuras de tiempo los US visiten canales que no están comúnmente disponibles y se pueda producir el rendezvous en los canales reemplazados, así, la sincronización de las secuencias de CH entre estos rompe el sincronismo previo con otros usuarios. En [19,20] se propone que cuando dos US coincidan en un canal sincronicen sus secuencias y actualicen el conjunto de canales potenciales para el rendezvous. De esta forma se garantiza que la sincronización de parámetros se produzca solo en los canales disponibles comunes para todos los usuarios de la CRN y por tanto evitar el problema de la ruptura del sincronismo de secuencia.
Cuando dos US sincronizan sus secuencias al menos uno de estos modifica su secuencia de CH y por consiguiente los TTR restantes con los demás US de la red. En dependencia de la estrategia de sincronización seguida es la repercusión de la renovación del TTR en las métricas de la red. En [21] se proponen estrategias que solucionan el problema de la ruptura del sincronismo e impiden, después de un rendezvous por pares, la renovación de los TTR restantes. Estas estrategias minimizan el MTTRM (MTTR de la red, donde el subíndice M denota la cantidad de US de la CRN), y por consiguiente se espera una reducción del ETTRM (ETTR de la red). Una manera de evitar el proceso de renovación del TTR es mediante el uso de múltiples radios [21]. El uso de múltiples radios también se ha considerado en [20,22-24], y tal como se esperaba, los resultados obtenidos mostraron una significativa reducción del TTR.
Este trabajo se centra en los algoritmos de rendezvous ciego en redes multiusuario. Evalúa el MTTRM y ETTRM mediante el empleo de distintas estrategias de sincronización y valora distintos métodos para adaptar los algoritmos de rendezvous al uso de más de un radio por US en escenarios multiusuario. Los resultados muestran la capacidad de estas estrategias y métodos para lograr el establecimiento de las comunicaciones en redes con un gran número de usuarios y diversas topologías en un tiempo relativamente corto. Aun así el desempeño de la red, dependiendo de la distribución de los nodos, puede verse afectado con el aumento del número de US. Por ello, en la Sección 3, se propone una nueva estrategia de sincronización en escenarios multiusuario en la cual cada US cuenta con dos radios, uno para sincronizar las secuencias de CH una vez alcanzado el rendezvous mientras, el otro continúa con su secuencia de CH. Como consecuencia el TTR restante de los enlaces nunca cambia por lo que no ocurre renovación de los TTR.
El MTTRM constante con el aumento del número de US e igual al MTTR de un rendezvous por pares es una de las más fuertes y prometedoras características de la estrategia de sincronización propuesta. Una implicación directa es que se puede acotar el ETTRM a dicho valor aunque la cantidad de US aumente. Como resultado se obtiene la correspondiente expresión matemática para el cálculo del ETTRM, extendiendo el estudio realizado en [21]. Esta propuesta es aplicable a los distintos algoritmos de rendezvous existentes, independientemente de la cantidad de US y la topología de red.
2. - RENDEZVOUS MULTIUSUARIO
La mayoría de los análisis presentados para evaluar el comportamiento del TTR consideran el rendezvous entre dos usuarios secundarios. Debido a la necesidad de escalabilidad en las CRN el presente trabajo se centra en extender algoritmos ya existentes a escenarios multiusuario mediante el uso de diferentes estrategias.
La idea básica que predomina es aplicar el rendezvous por pares entre los US hasta lograr el rendezvous entre todos los usuarios de la red [7,20]. Una vez que dos US han logrado el rendezvous de manera exitosa sus parámetros pueden ser sincronizados, de esta forma los dos US generarán una misma secuencia de salto de canal y continúan la búsqueda hasta haberse encontrado con todos los US de la red. Según [21] el número de rendezvous por pares necesario para que todos los usuarios de la red se encuentren en el mismo canal sería M-1, donde M es la cantidad de US de la CRN.
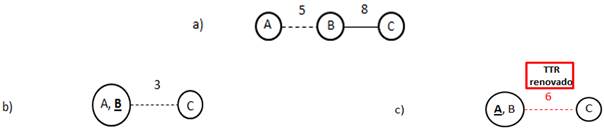
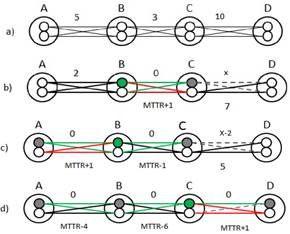
En la Figura 1 a) se muestra un ejemplo donde tres US intentan rendezvous, los TTR para que los US A y B y US B y C encuentren un canal común es 5 y 8 respectivamente. Transcurridos 5 ranuras de tiempo el US A y el B se encuentran en un canal y sincronizan sus secuencias de CH. Si el US A al sincronizarse con B toma su secuencia de CH el TTR restante para que el US C se encuentre con los US A y B es 3 ranuras de tiempo (como en la Figura 1 b), resultando 8 el MTTRM). Si por el contrario, al sincronizarse el US A y B, el US B toma la secuencia del A o deciden adoptar una nueva secuencia diferente a la que venían siguiendo entonces puede ocurrir un cambio del TTR restante con respecto al US C, como se muestra en la Figura 1 c). Esta modificación del TTR es denominada proceso de renovación del TTR y puede dar lugar a un aumento del MTTRM si su valor es mayor que el original, a modo de ejemplo en la Figura 1 c) el TTR renovado es 6, resultando 11 el MTTRM. Es fácil percatarse que si se evitan procesos de renovación durante el sincronismo el TTR de la red no sufrirá cambios y en el peor de los casos nunca podrá superar el MTTR de un rendezvous por pares.
Como es de esperar las estrategias de sincronización de secuencias de CH están llamadas a minimizar el TTR restante después de un proceso de renovación del TTR tanto como sea posible. En [21] son enunciadas tres estrategias fundamentales de sincronización de secuencias de CH y se considera que todos los usuarios de la red utilizan el mismo algoritmo para generar las secuencias de salto:
Reinicio aleatorio (RR, Random Restart): Los US que logran el rendezvous reinician sus secuencias de CH en un punto común seleccionado aleatoriamente.
Reinicio inherente (IR, Inherited Restart): Uno de los US que logra el rendezvous mantiene su secuencia de CH, el otro US se sincroniza con este y asume su patrón de salto.
Reinicio estimado (ER, Estimated Restart): El punto común de reinicio es seleccionado en base a datos disponibles de los US, como las configuraciones internas de las secuencias de salto, la trayectoria pasada de los US que hacen rendezvous, la topología de la red y otros.
En este trabajo para extender los algoritmos seleccionados al escenario multiusuario se hace uso de las estrategias RR e IR; esta última presenta muy buenos resultados en las topologías a utilizar como quedará señalado posteriormente.
2.1. - IMPACTO DEL DIÁMETRO DE LA RED
Para analizar matemáticamente los tiempos de rendezvous en una CRN con múltiples US es importante considerar la topología y el diámetro de la red. La Figura 2 muestra dos escenarios multiusuario de interés, las líneas entre los US indican que los mismos se pueden comunicar directamente, es decir uno está dentro del rango de cobertura del otro.
La Figura 2 a) ilustra un escenario con cuatro US, cada uno de ellos se puede comunicar con el resto de los US de la CRN y en la Figura 2 b) cada US solo se puede comunicar con algunos de los US. El análisis matemático del MTTR en estos escenarios fue realizado en [7,13]. Como resultado el MTTRM puede calcularse como MTTR M =H∙MTTR 2 donde H∈N es el diámetro de la red, denotando el número máximo de saltos entre dos US [12]; y MTTR 2 el MTTR entre dos US. No obstante, en [12] se discierne que esta es una apreciación demasiado general y se realiza un análisis más exhaustivo.
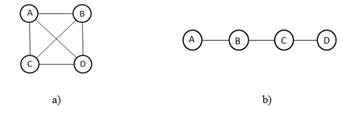
Figura 2 Ejemplo de escenarios multiusuario. a) Escenario multiusuario con un solo salto. b) Escenario multiusuario multisalto.
En la Figura 2 a) se tiene H=1 ya que todos los US se encuentran directamente interconectados entre sí. Los análisis matemáticos llevados a cabo [12,15,21] coinciden en que las redes con H=1 (topología malla) presentan un MTTRM independiente de la cantidad de US e igual al MTTR entre dos US siempre que es utilizada la estrategia de sincronización IR entre todos los US de la CRN. Por lo tanto, el MTTR de una red con estas características se puede calcular como MTTR M_1 =MTTR 2, donde MTTR M_1 es el MTTRM de una red con M US y diámetro 1.
En la Figura 2 b) los US más distantes (en número de saltos) son el A y el D, entonces H=3. Cada usuario secundario está conectado a dos US, excepto los de los extremos que solo están conectados a un US (topología lineal). Cuando la estrategia de sincronización IR es utilizada el TTR restante para uno de los enlaces (el perteneciente al US que actualiza su secuencia de salto) es renovado cada vez que ocurre un rendezvous por pares. Entonces, en el peor de los casos, se tiene exactamente un TTR renovado después de cada rendezvous por pares [21]. En [12] se llega a la conclusión que el MTTRM para este tipo de redes no depende solo del MTTR entre dos US y de la cantidad de saltos, sino que también está fuertemente influenciado por el número de rendezvous no simultáneos. Como resultado el MTTRM se encuentra acotado por la expresión MTTR M_H <∑ i R-1 (MTTR 2-i) donde MTTR M_H es el MTTRM de una red con M US y diámetro H (H≥2) y R el número de rendezvous no simultáneos necesarios para lograr el rendezvous entre todos los US.
2.2. - COMPARACIÓN DE ESTRATEGIAS DE SINCRONIZACIÓN DE SECUENCIAS
Con el objetivo de evaluar las métricas de desempeño en una CRN con múltiples US se simula una red con M≥2 US que intentan el rendezvous. Se asume que el tiempo se divide en ranuras de igual longitud y el espectro en N>1 canales sin solapamiento; cada canal presenta un identificador único conocido por todos los usuarios de la red. Los US tienen la misma disponibilidad de canales ya que se considera que sus ubicaciones geográficas están cerca, además los UP permanecen por largos períodos de tiempo en inactividad. El TTR será evaluado a partir del número de ranuras de tiempo necesarias para establecer el rendezvous una vez que todos los US han comenzado a intentarlo.
En los experimentos realizados se consideran 25 canales disponibles (N=25) y el número de US varía de 2 a 11. Para estimar el MTTRM se toma el máximo TTR de 105 simulaciones independientes y para el ETTRM se halla el TTR promedio. Los US son ubicados inicialmente en un canal aleatoriamente seleccionado y siguen un algoritmo de rendezvous determinado. Para la simulación y comparación en este escenario se han elegido los algoritmos SSB (Short Secuence Based) y EJS (Enhanced Jump Stay). Estos se desenvuelven con eficiencia en los modelos simétrico y asimétrico sin necesidad de sincronismo entre US y poseen mejores valores de ETTR y MTTR para el escenario con el modelo ideal que la mayoría de los algoritmos existentes.
El algoritmo SSB, presentado en [9], considera un conjunto de N canales ubicados en un segmento discreto. Los US comienzan las secuencias de salto en un extremo del segmento y progresivamente se mueven al otro extremo, una vez alcanzado el final regresan en sentido contrario hacia el inicio. En un segmento continuo cualquier par de US se encontrará antes de que el último que comenzó a transmitir alcance el extremo inicial del segmento en el regreso. Debido a que los US saltan sobre puntos discretos, hay casos en que la posición se cambia sin que ocurra rendezvous. Para evitar esto, una vez que los usuarios retornan al inicio permanecen allí por una ranura de tiempo más. En [9] se demostró para el algoritmo SSB que MTTR 2=2N-2 y ETTR 2=2(N-1)2/(2N-1).
El algoritmo EJS, presentado en [14], genera secuencias de salto en rondas donde emplea patrones de salto y patrones de estancia. Para generar los patrones en un ciclo el usuario debe seleccionar tres parámetros con anterioridad: P (menor número primo mayor que N); r (número entero acotado en [1, N]) y un índice i (número entero acotado en [1, P]). En cada ronda la secuencia de salto dura 3P ranuras de tiempo y la subsiguiente secuencia de permanencia se extiende por P ranuras de manera que cada ciclo dura 4P ranuras de tiempo en total. En la secuencia de salto el usuario comienza a saltar en el canal con índice i y continúa de esta forma sobre [1, P] con una longitud en cada paso igual a r usando el módulo de operaciones P. En la subsiguiente secuencia de permanencia, el usuario solo salta en el canal r. El índice i es cambiado en cada ronda. En [14] se demostró para el algoritmo EJS que MTTR 2=4P y ETTR 2=(3P⁄2)+3.
En un primer experimento se evalúa el algoritmo SSB en las topologías de red malla y lineal usando las estrategias de sincronización RR e IR, cada usuario está equipado con un único radio. Como se observa en la Figura 3, tanto en la topología malla como lineal el resultado es mejor cuando se usa la estrategia de sincronización IR ya que en el resto de los enlaces, después de un rendezvous por pares, no hay renovación en el caso de la topología malla; y en la topología lineal, en el peor de los casos, solo se renueva un enlace.
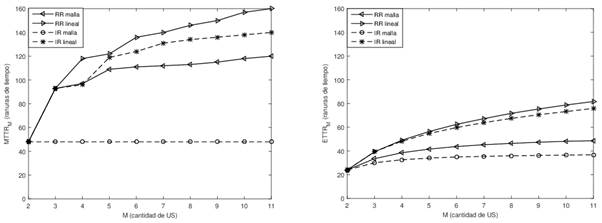
Figura 3 MTTRM y ETTRM, algoritmo SSB con N=25. Topologías malla y lineal, sincronización de secuencias con IR y RR.
En el algoritmo SSB el MTTRM para la topología malla con IR permanece invariable con el aumento del número de US e igual a MTTR 2=2N-2=48 ranuras de tiempo, no siendo así para la topología lineal donde la métrica empeora con el aumento del número de US. Se aprecia que el ETTRM de la CRN comienza a crecer con el aumento del número de US a partir de ETTR 2=2(N-1)2/(2N-1)≈23.5. Para la topología malla crece de manera lenta, de hecho, se mantiene prácticamente constante a partir de M=5, en la topología lineal crece de manera más acelerada, sin embargo, tampoco presenta una curva demasiado pronunciada en su comportamiento. En correspondencia con los resultados anteriores, para extender otros algoritmos al escenario multiusuario sólo se hace uso de la estrategia de sincronización de secuencia con reinicio inherente que es la que mejor resultados presenta.
Considerando los algoritmos que no necesitan de la asignación previa de roles y emplean un solo radio, se compara en un segundo experimento el algoritmo SSB con el EJS, usando la estrategia de sincronización IR, tanto para la topología malla como lineal. Como se muestra en la Figura 4 el algoritmo SSB es superior con respecto al EJS en cuanto al MTTRM, esto es consecuencia directa del empleo de una secuencia de CH con período más corto en el algoritmo SSB; pero no influye de igual forma en el ETTRM.
En el algoritmo EJS el MTTRM para la topología malla con IR también es constante e igual a 114, muy cercano a su valor teórico MTTR 2=4P=116. En la topología lineal la métrica empeora con el aumento del número de US. El ETTRM de la CRN comienza a crecer aproximadamente a partir de 17 con el aumento del número de US, este valor es menor que el valor teórico ETTR 2=(3P⁄2)+3=46.5.
2.3. - IMPACTO DEL USO DE MÚLTIPLES RADIOS
La mayoría de los algoritmos diseñados actualmente asumen que cada US está equipado con un solo radio. A medida que avanza la tecnología, los costos de fabricación se hacen cada vez menores, y los dispositivos de radio son más fáciles de adquirir. Esta característica puede influenciar directamente en la mejora del proceso de rendezvous. Cuando un US está equipado con varios radios, el TTR puede ser reducido significativamente ya que los US pueden acceder a más canales en la misma ranura de tiempo.
En [22] se consideran dos estrategias para generalizar algoritmos en función de capacitarlos para el uso de múltiples radios, estas son el método de secuencia independiente y el de secuencia paralela. El método de secuencia independiente aplica una secuencia de CH diferente en cada radio, estas son generadas por alguno de los algoritmos existentes. Con esta estrategia cada radio es tratado como un usuario virtual independiente intentando el rendezvous, lo cual implica una mejora en el TTR. Según [22] mediante esta estrategia si dos usuarios actúan bajo un algoritmo determinado, el MTTR con múltiples radios será igual al MTTR bajo la acción de un solo radio, por tanto aunque se alcanza a mejorar el ETTR, el MTTR no cuenta con mejoras apreciables. En el método de secuencia paralela cada usuario aplica un algoritmo existente para generar una secuencia de salto. Entonces, esta secuencia se ejecuta en paralelo en todos los radios del usuario. Bajo este método, si se supone que todos los usuarios están equipados con k cantidad de radios, dos usuarios cualesquiera actuando bajo el mismo algoritmo reducirán el MTTR, según [22], en k veces con respecto al MTTR de dicho algoritmo con un solo radio.
2.4. - COMPARACIÓN DE ESTRATEGIAS QUE EMPLEAN MÚLTIPLES RADIOS EN CRN MULTIUSUARIO
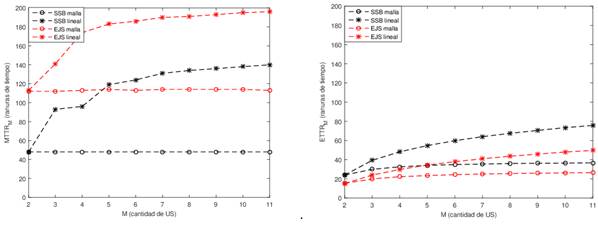
En [12] se generalizan diferentes algoritmos de rendezvous para el empleo de múltiples radios y se concluye que el por ciento de mejora introducida al MTTR y ETTR en esta situación disminuye con el aumento de la cantidad de radios. Estos resultados sugieren que las mejoras son apreciables en cuantía con el uso de dos o tres radios por US, a partir de ahí los porcientos de mejora son similares y la relación desempeño-costo no sería apropiada. De esta manera, en un tercer experimento, se aplican los métodos expuestos en la sección anterior para generalizar los algoritmos SSB y EJS para el empleo de múltiples radios (secuencia paralela y secuencia independiente) en una CRN similar a la de los experimentos anteriores. Se usan dos radios en cada US y se evalúa, para cada una de las topologías de red: malla (Figura 5) y lineal (Figura 6). El MTTRM y ETTRM obtenido en estas condiciones se compara con el desempeño del algoritmo FDCH-CS (Full Diversity Channel Hopping-Common Strategy) que está diseñado para funcionar con dos radios.
El algoritmo FDCH-CS es presentado en [12]. La idea básica para generar las secuencias de salto de canal consiste en colocar T puntos discretos en un anillo, de forma tal que cada punto represente uno de los N canales de la red, de esta manera T≥N en todas las situaciones. Los US se sitúan inicialmente en una de las T posiciones del anillo y los radios recorren el anillo en direcciones contrarias una posición a la vez y a la misma velocidad. Para eliminar la asignación previa de roles cada US sigue en cada ranura de tiempo una secuencia diferente en dependencia de si cumple el rol de receptor o si está destinado a la transmisión, de esta manera no es necesario preestablecer el rol de cada usuario, ya que cada uno puede desempeñar ambos roles simultáneamente. En [12] se demostró para el algoritmo FDCH-CS que MTTR 2=(T-1)/2 y ETTR 2=(T-1)(T+1)/4T.
En comparación con los resultados de la Figura 4, donde se emplea un solo radio por US, el MTTRM de los algoritmos SSB y EJS, cuando se implementa la secuencia de CH de forma paralela en los dos radios, disminuye a la mitad. El ETTRM disminuye en mayor cuantía.
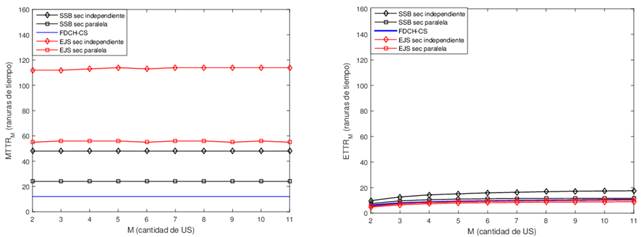
Figura 5 MTTRM y ETTRM, algoritmos SSB, EJS y FDCH-CS con N=25, k=2, secuencia paralela e independiente, sincronización con IR, topología malla.
En la Figura 5 se observa que el algoritmo que mejor se desenvuelve en estas condiciones es el FDCH-CS, cuyo MTTRM es aproximadamente 10 ranuras de tiempo menor que el de SSB, y 40 menor que el de EJS con secuencia paralela. En el algoritmo FDCH-CS el MTTRM para la topología malla con IR es constante e igual a MTTR 2=(T-1)/2=12, y el ETTRM comienza a crecer con el aumento del número de US a partir de ETTR 2=(T-1)(T+1)/4T=6, (como la cantidad de canales es impar T=N [12]).
A diferencia del MTTRM para una red con estas características, en el ETTRM tiene buen desempeño el uso de radios con secuencia independiente para el algoritmo EJS. Es decir, cuando se aplica una secuencia de CH independiente en cada radio el ETTRM disminuye a más de la mitad del valor obtenido con un radio. En el caso particular de la topología lineal la mejora es más significativa si se compara con el uso de radios con secuencia paralela a medida que aumenta la cantidad de usuarios como se muestra en la Figura 6.
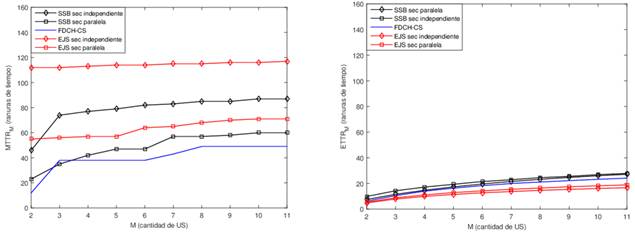
Figura 6 MTTRM y ETTRM, algoritmos SSB, EJS y FDCH-CS; con N=25, k=2, secuencia paralela e independiente, sincronización con IR, topología lineal.
El algoritmo FDCH-CS presenta mejor MTTRM que los algoritmos SSB y EJS adecuados al empleo de dos radios con secuencia paralela e independiente. Los resultados del algoritmo EJS en cuanto a ETTRM superan los resultados del algoritmo FDCH-CS y SSB a pesar de que el algoritmo EJS presenta un mayor MTTRM. Esto se debe a la distribución de probabilidad que siguen los TTR de dichos algoritmos.
3. - ESTRATEGIA PROPUESTA PARA EL RENDEZVOUS MULTIUSUARIO
Las estrategias de sincronización de secuencias de CH en conjunto con los métodos para el empleo de múltiples radios por US evaluados en los experimentos anteriores muestran su capacidad para establecer las comunicaciones en redes con más de dos US. Aun así, la cantidad de US, la distribución de los nodos y el diámetro de la red son factores que influyen en el desempeño de la misma. A continuación se propone un método para el uso de dos radios en cada nodo que asegura la no renovación de los TTR y es independiente de los factores antes mencionados.
Para ello se considera una CRN formada por M≥2 US, el espectro está dividido en N≥2 canales no solapados y cada US está equipado con dos radios que comienzan a saltar con el mismo patrón de salto. Cada vez que dos o más dispositivos de red alcanzan el rendezvous sus secuencias de CH son sincronizadas en uno de sus radios (siempre el mismo radio) mientras el otro radio continúa con su secuencia de CH. Como consecuencia el TTR restante de los enlaces nunca cambia por lo que no ocurre renovación de los TTR.
La Figura 7 muestra este proceso de sincronización en una red con 4 US. Los US son representados con círculos, cada uno tiene dos círculos en el interior que representan sus dos radios. Cada vez que un US comienza a intentar el rendezvous sus radios comienzan a saltar con la misma secuencia de CH. Al coincidir con otro US ocurre un rendezvous por pares; cada US sincroniza uno de sus radios (el superior) y el otro (el inferior) continúa con su secuencia de CH. Las líneas que unen los círculos representan los enlaces, y los números que se indican en ellos son los TTR restantes para que se encuentren los US. Cuando un rendezvous por pares ocurre el TTR restante es cero pues los US comienzan a saltar juntos. El rendezvous de la red es alcanzado cuando el TTR restante entre todos los US es cero.
En la Figura 7 a) los usuarios B y C son los primeros en lograr rendezvous. Después de 3 ranuras de tiempo B y C coinciden en un mismo canal. Para estos usuarios, en el caso de los radios superiores, el círculo verde representa al que mantiene su secuencia de salto de canal y el gris el que la actualiza. Cuando 2 usuarios se encuentran, los enlaces de los radios que comienzan a saltar juntos se representan en verde (TTR = 0), los enlaces de los radios que continúan sus secuencias de CH se representan en rojo (en este escenario general la secuencias se interceptan en un solo punto, después que 2 US coinciden en un canal si no sincronizan sus secuencias no se vuelven a encontrar hasta TTR =MTTR 2 + 1) y los enlaces entre el radio que actualizó su secuencia de CH y los radios del US vecino con líneas discontinuas (TTR = X; 0 ≤ X ≤ MTTR 2).
La Figura 7 b) describe lo que sucede después del primer rendezvous por pares. En este ejemplo el radio superior de C comienza a saltar siguiendo la secuencia de B, y los radios inferiores continúan con sus secuencias de CH. Como el radio superior de C adopta la secuencia de B; el TTR restante de este con los radios de D se reinicia, pero el TTR entre el radio inferior de C y los radios de D se mantiene. La red, desde el punto de vista del rendezvous, puede ser modelada como una red con M-1=3 US, donde los radios superiores de B y C saltan juntos.
Dos ranuras de tiempo después el radio superior de A se encuentra con el radio superior de B y C, y los radios inferiores de A y B continúan con sus secuencias, como se muestra en la Figura 7 c). Cinco ranuras de tiempo después, el radio inferior de C y los radios de D se encuentran en un canal común y quedan sincronizados los radios superiores de todos los US, como se muestra en la Figura 7 d). En este ejemplo el TTR de la red es 3+2+5=10 ranuras de tiempo.
El razonamiento hecho en el ejemplo de la Figura 7 es válido para cualquier distribución de los usuarios, lo que permite aplicar el análisis independientemente de la topología de la red. Es importante destacar que el uso de dos radios en cada nodo asegura que la estrategia de sincronización evite la renovación de los TTR. Como consecuencia el MTTR de la red será siempre igual al mayor de los TTR, el cual se encuentra acotado por el MTTR 2.
3.1. - CÁLCULO DEL ETTR
Se considera una red ad-hoc con M usuarios cognitivos y un algoritmo de rendezvous general. El ETTR y MTTR de la red compuesta por M US se representan como ETTR M y MTTR M respectivamente. El MTTR de un rendezvous por pares puede escribirse como MTTR 2. El ETTR M es calculado bajo las siguientes asunciones:
los TTR de los enlaces son modelados como una variable independiente e idénticamente distribuida (i.i.d), lo que implica que cada variable tiene la misma distribución de probabilidad que las demás y son mutuamente independientes; comportándose como una distribución discreta uniforme en el intervalo [0,MTTR M ].
las estrategias de sincronización de CH garantizan que no ocurra renovación de TTR durante el proceso de rendezvous (por ejemplo mediante el uso de 2 radios como se describe en la sección anterior).
Sea X i la variable aleatoria que describe el TTR del enlace i-ésimo. Entonces, según (ii) el TTR de la red, denotado por TTR M , puede obtenerse como:
TTR M =max{X i }(1)
En este caso, dado que X i ≤MTTR 2 para todas las i se cumple lo siguiente:
MTTR M = max{TTR M }=MTTR 2 (2)
De hecho, el MTTR M igual al MTTR 2 es una de las más fuertes y prometedoras características de la estrategia de sincronización en la cual el proceso de renovación de TTR es evitado. Una implicación directa es que se puede acotar el ETTR M como:
ETTR M = E{TTR M }≤MTTR 2 (3)
Como TTR M es una variable aleatoria entera no negativa en el intervalo [0,MTTR 2] el valor exacto de ETTR M puede ser calculado como:
 (4)
(4)
En (4), al descomponer la suma  se obtiene
se obtiene  . Teniendo en cuenta que P(TTR
M
>x)=1-P(TTR
M
≤x), entonces
. Teniendo en cuenta que P(TTR
M
>x)=1-P(TTR
M
≤x), entonces  . Por otra parte, dado que deben ocurrir M-1 rendezvous por pares antes de alcanzar el rendezvous de la red y considerando (i); la función de distribución acumulada del TTR
M
puede expresarse como sigue:
. Por otra parte, dado que deben ocurrir M-1 rendezvous por pares antes de alcanzar el rendezvous de la red y considerando (i); la función de distribución acumulada del TTR
M
puede expresarse como sigue:
 (5)
(5)
Donde P(X
i
≤x) es la misma para toda i e igual a  . Resolviendo se obtiene (5). Finalmente, sustituyendo (5) en (4) se tiene:
. Resolviendo se obtiene (5). Finalmente, sustituyendo (5) en (4) se tiene:
 (6)
(6)
Al incrementar el número de US el ETTR M tiende asintóticamente a MTTR 2, entonces cuando M tiende a infinito se obtiene:
 (7)
(7)
3.2. - EVALUACIÓN DE LA ESTRATEGIA PROPUESTA
Los gráficos de la Figura 8 muestran el último experimento donde se simula el modelo propuesto anteriormente y se compara con la expresión analítica obtenida. El número de US varía de 2 a 30. En el modelo propuesto cada US está equipado con dos radios que comienzan a saltar con el mismo patrón de salto (el patrón de salto está determinado por la secuencia de CH de algún algoritmo existente), y siguen las estrategias de sincronización descritas en la Sección 3.
Para evaluar el comportamiento del modelo propuesto los radios de los US siguen secuencias de CH correspondientes a los algoritmos SSB y EJS respectivamente. No se usa el algoritmo FDCH-CS ya que este algoritmo fue diseñado para el empleo de dos radios que siguen diferentes secuencias en dependencia de si cumplen el rol de receptor o transmisor, lo que complejiza la adecuación al modelo.
El MTTR M del algoritmo SSB con la estrategia de sincronización propuesta coincide con el MTTR M del modelo propuesto y el resultado de la ecuación (2); donde MTTR 2=48; obtenido en la sección 2.2. En el caso del ETTR M coincide el modelo propuesto y la ecuación que lo describe (6), validando el análisis presentado en la sección anterior, pero la simulación con el algoritmo real difiere un poco del resultado anterior. La razón de este comportamiento es que, asumir que el TTR entre los enlaces es una variable con una distribución discreta uniforme (i), representa el peor escenario, mientras en el algoritmo SSB los TTR de los enlaces no están distribuidos de forma uniforme (TTR =0) tiene dos veces más probabilidad de ocurrencia que los otros).
El MTTR M del algoritmo EJS con la estrategia de sincronización propuesta se acerca bastante al MTTR M del modelo propuesto y al resultado de la ecuación (2); donde MTTR 2=116, obtenido en la sección 2.2, pues la diferencia no es mayor que dos ranuras de tiempo. En el caso del ETTR M coincide el modelo propuesto y la ecuación que lo describe (6), pero el ETTR M con el algoritmo real es mucho menor que el resultado anterior. La razón de este comportamiento es que en algoritmo EJS los TTR de los enlaces no están distribuidos de forma uniforme (a medida que aumente el valor de la variable TTR disminuye la probabilidad asociada a esta).
En ambos casos el MTTR M está acotado por el MTTR 2 y este a su vez limita el ETTR M que incrementa con M como se predijo en la ecuación (7), pero nunca alcanza el valor MTTR 2 .

4. - CONCLUSIONES
El presente trabajo resulta útil para el diseño de algoritmos de rendezvous eficientes en una CRN ad-hoc con múltiples US. En los escenarios simulados la utilización de múltiples radios disminuye el MTTR y ETTR de la red.
Se presenta un modelo matemático para estimar el ETTRM de la nueva estrategia para lograr rendezvous multiusuario y se compara mediante simulación. Dicha estrategia se aplica a algoritmos reales para mostrar su efectividad. Los resultados muestran que las expresiones analíticas proveen una buena estimación del ETTRM, el cual se encuentra acotado por el MTTR2 independiente del número de US y la topología de red.
Queda pendiente considerar el modelo simétrico ya que la disminución del número de canales disponibles comunes da lugar a una disminución del ETTR y el MTTR de la red. En el caso del modelo asimétrico al disminuir el número de canales disponibles comunes aumenta el valor de dichos parámetros.

