










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. INTRODUCCIÓN
La escasez de agua a nivel mundial es un asunto que requiere especial atención. Esta situación está estrechamente vinculada al hecho de que muchos sistemas de abastecimiento de agua alrededor del mundo cuentan con un largo período de explotación y han sido objetos de un alto grado de corrosión y deterioro [1]. Como consecuencia se producen fugas, en los sistemas de distribución de agua (SDA) provocando cuantiosas pérdidas.
Estudios realizados por el Banco Mundial demostraron que anualmente más de 32 mil millones de metros cúbicos de agua se pierden debido a fugas en las redes de distribución en todo el mundo [2]. En los Estados Unidos se reportan pérdidas del 20% del agua producto a la ocurrencia de fugas [3]. Países europeos como Portugal e Italia incurren en pérdidas de hasta un 36 % y en el Reino Unido de 20-23% del volumen de agua introducido en los sistema de distribución de agua [2]. En Cuba el Instituto Nacional de Recursos Hidráulicos (INRH) reportó que en el año 2017 se perdió el 45 % del agua bombeada en los SDA [4].
Por la importancia que presenta para los acueductos la detección y localización de fugas de fondo, en la comunidad científica ha surgido un gran interés por analizar el proceso de detección y localización de la fuga de fondo. A continuación se relacionan varios de los trabajos reportados en este tema.
Kadri y colaboradores reportan un trabajo dirigido a la evaluación empírica de señales acústicas para detectar fugas en tuberías plásticas. Estos investigadores utilizan el factor de fuga
Almeida y colaboradores realizan un estudio dirigido al efecto provocado por el sistema tubería-sensor sobre la detección de la fuga de fondo. En dicho trabajo estos investigadores obtienen un modelo matemático para predecir la frecuencia máxima del espectro de frecuencia, lo cual brinda la posibilidad de estimar la frecuencia de muestreo mínima que se debe emplear en dicho sistema. Además, empíricamente definen cual es la frecuencia de corte a las bajas donde no va a emitir la fuga. Otro aporte reportado por estos autores es la selección de la banda de frecuencia donde emite una fuga mediante la décima parte de la densidad espectral de potencia cruzada (DEPC) normalizada por el valor máximo de amplitud que esta arroje [6].
Gao y colaboradores realizan el estudio de varios procedimientos para obtener un mejoramiento de la forma de la función correlación cruzada dirigido a la detección y localización de la fuga de fondo. Luego de realizar los estudios de los procedimientos, dichos investigadores plantean que para poder obtener una mejor forma de la correlación cruzada y por consiguiente lograr una mejor estimación del retardo de tiempo se debe aplicar la transformada de la coherencia o la transformada de fase (PHAT, por sus siglas en inglés) [7]. Estos investigadores trabajan con una tubería hecha a la medida lo que implica que tienen conocimiento de parámetros de la tubería que en la vida real se dificulta mucho su estimación [8]. Otra dificultad planteada sobre la técnica PHAT es que no es muy útil para el caso donde la relación señal a ruido (SNR, por sus siglas en inglés) se encuentra degradada [9]. En el 2018 estos investigadores publican un estudio sobre el mejoramiento de la estimación del retardo de tiempo obtenido mediante la correlación cruzada utilizando el método diferenciación de proceso (DIF, por sus siglas en inglés) [8]. A pesar del mejoramiento obtenido en la estimación del retardo de tiempo el método propuesto en [8] no es conveniente emplearlo en ambientes donde la SNR este degradada debido a que dicho método, en el dominio de la frecuencia, consiste en multiplicar la densidad espectral cruzada por una función de peso la cual no mejora la SNR.
Choi y colaboradores muestran un nuevo procedimiento para la detección de fuga en tuberías de agua. Dicho procedimiento posee sus bases en la técnica de correlación cruzada básica y el estimador de máxima verosimilitud (ML, por sus siglas en inglés) [9]. Los autores en este trabajo proponen un nuevo método para realizar una mejor estimación del ML incluyéndole un factor de regulación.
Martini y colaboradores proponen un método para la detección de fuga de agua mediante el análisis de la correlación cruzada generalizada de señales vibro-acústicas, además, utilizan como métrica estadística la Curtosis [10]. Una dificultad presente en este trabajo es que utilizan la correlación cruzada generalizada lo que provoca un aumento del costo computacional [9]. Por otra parte, utilizar la función correlación cruzada para la detección de fugas en ambiente ruidoso no es conveniente debido a que al sistema de medición pueden acoplarse señales espurias con características coherentes que degraden la SNR aumentando la incertidumbre en la detección y localización.
Shun Na y colaboradores reportan un método adaptativo para la localización de fugas de agua basado en la combinación de la red neuronal del tipo propagación hacia atrás (BP, por sus siglas en inglés) y la función correlación cruzada generalizada. Además, en el proceso de identificación sobre la presencia de fuga realizan un análisis del espectro de frecuencia. Un inconveniente detectado en este trabajo es que realizan el análisis de los espectros de frecuencia de la señal que arriba a cada sensor por separado pues bajo un ambiente ruidoso el ruido de color afecta grandemente la selección de la banda de frecuencia donde se encuentra emitiendo la fuga. Otro inconveniente está en el uso de la función correlación generalizada para la estimación de la diferencia de tiempo de arribo pues en [9] se plantea que esta es muy sensible al ruido de color y requiere un alto costo computacional [11].
El principal inconveniente que presentan los trabajos reportados por la comunidad científica es que no hacen un análisis para mejorar la SNR de la fuga de fondo haciendo que los procedimientos de detección y localización se vean vulnerables frente a la presencia de señales espurias. Esto debilita la efectividad de los métodos propuestos en sistemas de distribución de agua que se encuentren bajo la presencia de un ambiente ruidoso.
En el presente trabajo se implementa un nuevo procedimiento dirigido a la detección y localización de la fuga de fondo bajo un ambiente ruidoso. En la etapa de detección se le aplica la función coherencia a las señales acústicas captadas por los hidrófonos. Una vez detectada la señal e identificada la banda de frecuencia donde la fuga de fondo presenta mayor SNR, se aplica un filtro digital pasa-banda en dicha gama de frecuencias para atenuar las componentes de frecuencia indeseadas y disminuir el error en la localización. Posteriormente mediante el cómputo de la correlación cruzada utilizando la transformada rápida de Fourier se estima la posición de la fuga de fondo. El procesamiento fue realizado utilizando MATLAB y datos adquiridos de una tubería de polietileno de alta densidad (PEAD) que se encuentra instalada en el laboratorio del Centro de Investigaciones Hidráulicas (CIH) perteneciente a la Universidad Tecnológica de La Habana José Antonio Echeverría, Cujae.
2.- MARCO TEÓRICO
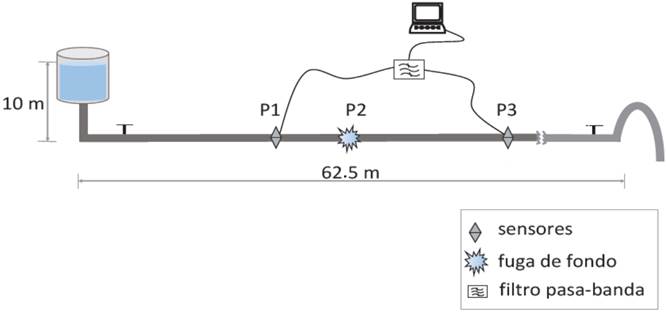
La fuga de agua en una tubería genera una emisión acústica que se propaga uniformemente a lo largo del conducto en ambos sentidos [6]. Dicha emisión acústica es medida utilizando dos sensores que se ubican a ambos lados de la fuga [8]. La Figura 1 representa el esquema utilizado para detectar y localizar una fuga en la región de la tubería limitada por los puntos de acceso donde los sensores son instalados, siendo

La detección y localización de la fuga de fondo se puede realizar mediante el uso de técnicas matemáticas que presenten su basamento en la transformada de Fourier. Para ello es necesario determinar las componentes espectrales de las señales de fuga y diferenciarlas de las componentes de ruido. Esto es posible empleando la función coherencia. Dicha función permite encontrar frecuencias comunes entre dos señales y evaluar la similitud entre ellas. Aplicada a un proceso estacionario proporciona una medida estadística de la correlación entre dos señales en función de sus frecuencias. Esta herramienta matemática es muy utilizada por la comunidad científica en investigaciones donde se desea detectar fallas [13-15].
En la Figura 2 se describe en forma de diagrama en bloques el algoritmo para computar la coherencia entre dos señales.

En la Figura 2
Una vez detectada la fuga de fondo se estima su posición con respecto a uno de los puntos de medición a partir de la ecuación (1) [7,12].
donde:
d es la distancia entre los sensores
Inicialmente la velocidad se estima en la práctica para una fuga conocida mediante la ecuación (2) y el valor del retardo de tiempo se calcula mediante la función correlación cruzada la cual es muy utilizada para estimar la diferencia de tiempo de arribo y la similitud entre dos señales [16-18].
Es conveniente estimar el retardo de tiempo mediante la transformada de Fourier empleando el algoritmo presentado en la Figura 2 debido a que este es menos costoso computacionalmente. Además, el método de estimación de la diferencia de tiempo en el dominio de la frecuencia es de gran ayuda en tuberías de plástico y para situaciones de múltiples fugas. También esta vía de cálculo es más efectiva para fugas pequeñas, o para situaciones de altos niveles de ruido de fondo[9].
La Figura 3 muestra el diagrama en bloques del algoritmo utilizado para el cómputo de la correlación cruzada básica,
Es de utilidad expresar la correlación cruzada en una forma normalizada, lo que se conoce como coeficiente de correlación cruzada
donde:

3.- EQUIPAMIENTO PARA LAS PRUEBAS EXPERIMENTALES
La Figura 4 muestra un esquema con la vista lateral de la instalación utilizada para realizar el análisis de la detección y localización de la fuga de fondo en ambiente ruidoso. En los puntos P1 y P3 se ubicaron los sensores y en el punto P2 se generó la fuga de fondo.
Para la adquisición de las señales se diseñó un instrumento virtual (IV) que permite la manipulación de los datos en tiempo real. La Figura 5 muestra el diagrama en bloques del IV.

Los hidrófonos empleados presentan una sensibilidad de -202 dB a -142 dB relativo a 1 V/μPa y su rango de frecuencia de trabajo está comprendido entre 0.1 Hz y 140 kHz. Estos sensores están acoplados a un acondicionador de señal compuesto por un filtro activo pasa-banda con ganancia 31 dB. Las frecuencias de corte de este filtro fueron establecidas en 10 Hz y 200 Hz. La señal acondicionada es adquirida mediante la tarjeta de sonido de la computadora con una frecuencia de muestreo de 1 kHz. Para manejar la tarjeta de sonido para la adquisición de los datos se creó una interfaz gráfica de usuario en MATLAB.
4.- RESULTADOS Y DISCUSIÓN
Para validar el procedimiento diseñado se conformaron tres escenarios. La Tabla 1 muestra los valores de distancias entre los sensores y la fuga para cada escenario tomando de referencia la Figura 4.
Para los dos primeros escenarios se adquirieron 30 señales con la presencia de fuga de fondo y 30 señales en ausencia de ella para caracterizar el piso de ruido y contar con una referencia del comportamiento de la tubería cuando no hay presencia de fuga de fondo. En el último escenario solo se adquirieron las señales en presencia de la fuga de fondo para simular una situación real en la que la medición del ruido de fondo no puede realizarse.
Tabla 1 Distancia entre los sensores y la fuga de fondo.
| Escenarios | d (m) |
|
|
|---|---|---|---|
| 13.3 | 3.2 | 10.1 | |
| 22.69 | 9.39 | 13.3 | |
| 22.69 | 12.59 | 10.1 |
4.1.- DETECCIÓN DE LA FUGA DE FONDO
En el primer y segundo escenario se realizaron las pruebas para la detección de la fuga de fondo. La Figura 6 muestra las señales adquiridas en el dominio del tiempo. Puede notarse que existe un aumento en la amplitud de las señales adquiridas por el sensor bajo la presencia de fuga de fondo.
También se puede apreciar como la señal con fuga medida por el sensor 1 tiene una mayor amplitud que la señal con fuga medida por el sensor 2. Esto se debe a que el sensor 1 está más próximo a la fuga, lo que implica que esta ha recorrido una menor distancia y es menos afectada por la amortiguación en las paredes de la tubería.
Para detectar la fuga de fondo mediante la función coherencia, fue necesario analizar la coherencia del ruido y de la fuga, para determinar en una misma banda que componentes espectrales de la señal con fuga tenían una coherencia superior a la del ruido indicando la banda de frecuencia donde la SNR es máxima.
Las regiones de alta coherencia de las señales de fuga fueron resaltadas en los gráficos de la Figura 7 para los dos escenarios.
Las frecuencias límites de las regiones sombreadas, ancho de banda útil (ABU), en la Figura 7 determinan las frecuencias de corte para el filtro digital que se aplica antes de evaluar la correlación, garantizando que se correlacione la mayor porción de la señal adquirida correspondiente a la fuga y no al ruido inherente de la medición.
4.2.- ESTIMACIÓN DE LA VELOCIDAD DE PROPAGACIÓN
La estimación de la velocidad se realizó determinando el retardo de tiempo mediante la función correlación cruzada de las señales acústicas de las fugas detectadas en el primer y segundo escenario y evaluando el resultado en la ecuación (2). A
La Figura 8 muestra el coeficiente de correlación cruzada obtenido para los dos escenarios con el respectivo retardo de tiempo calculado.

Figura 6 Señales adquiridas por los hidrófonos. En azul se representa la señal con presencia de fuga y en negro el ruido.

Figura 7 Coherencia de las señales con presencia de fuga de fondo (azul) y coherencia del ruido (negro).

La Tabla 2 resume los resultados obtenidos para estos dos escenarios en cuanto a ABU para el cálculo de la correlación cruzada, retardo de tiempo y velocidad de propagación de la onda de presión acústica.
Tabla 2 Resultados obtenidos en la estimación de la velocidad.
| Escenario |
|
|
ABU (Hz) |
|
c (m/s) |
|---|---|---|---|---|---|
| 3.2 | 10.1 | 60 - 120 | 25 | 276 | |
| 9.39 | 13.3 | 60 - 95 | 14 | 279.29 |
En la Tabla 2 se muestra que la velocidad no varió significativamente de un escenario a otro. Se nota además, como el ABU disminuyó con el incremento de la distancia lo cual se debe a la atenuación de las componentes de frecuencia mostrando la existencia de proporcionalidad entre el ABU y la distancia entre los sensores.
4.3.- LOCALIZACIÓN DE LA FUGA DE FONDO
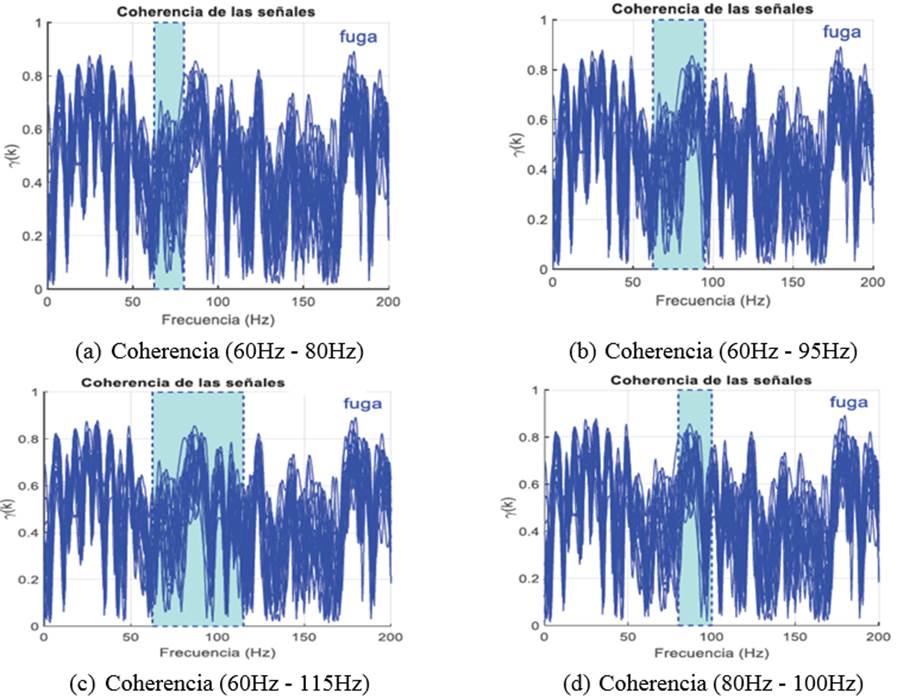
Una vez estimada la velocidad de propagación se procedió a la localización de la fuga de fondo. Para ello se utilizó el tercer escenario, en el cual, se mantiene la ubicación de los sensores con respecto al segundo escenario y se varía la posición de la fuga. En la Figura 9 se muestra la coherencia entre las señales de los dos sensores.
Como se puede apreciar en la Figura 9 el rango donde existe mayor coherencia, o sea, donde mejor se comporta la SNR abarca el intervalo de frecuencias comprendido entre 60 Hz y 115 Hz.
En la Figura 10 se muestra el coeficiente de correlación cruzada para las diferentes frecuencias de corte del filtro. Puede notarse como la estimación del retardo de tiempo es afectada por la selección de las frecuencias de corte del filtro, provocando que se realice una mala estimación del retardo de tiempo lo que conlleva a que se incremente el error en la localización.
Luego, se evaluaron en la ecuación (1) los valores de las velocidades (276 m/s y 279,29 m/s) estimados en los dos primeros escenarios y el retardo de tiempo calculado para obtener la distancia aproximada del sensor 1 a la fuga (d1). La Tabla 3 muestra un resumen de la posición estimada de la fuga y el error cometido en su estimación para las velocidades y los retardos de tiempo calculados en una de las pruebas realizadas en el tercer escenario.
Como se aprecia en la Tabla 3 la mejor estimación de la posición de la fuga con respecto al sensor 1 fue lograda con el
Tabla 3 Resultados en la estimación de la posición de la fuga de fondo en el tercer escenario.
| ABU (Hz) | c (m/s) |
|
d1 (m) | Error en la localización (%) |
|---|---|---|---|---|
| 60 - 80 | 276 | 21 | 14.24 | 13.1 |
| 60 - 95 | 276 | 7 | 12.31 | 2.2 |
| 60-115 | 276 | 6 | 12.17 | 3.3 |
| 80-100 | 276 | 4 | 11.9 | 5.5 |
| 60 - 80 | 279.29 | 21 | 14.24 | 13.3 |
| 60 - 95 | 279.29 | 7 | 12.31 | 2.1 |
| 60-115 | 279.29 | 6 | 12.17 | 3.25 |
| 80-100 | 279.29 | 4 | 11.9 | 5.5 |
4.4.- COMPARACIÓN DE LOS MÉTODOS
A continuación se comparan los métodos reportados en el estado del arte con el procedimiento desarrollado en este trabajo. Cada uno de estos métodos se implementó usando los datos obtenidos en el laboratorio del CIH.
4.4.1.- ETAPA DE DETECCIÓN
La Figura 11 muestra los resultados obtenidos luego de computar el factor de fuga propuesto por [5]. En el eje de la abscisa se muestra el número de señales analizadas y en el eje de la ordenada el valor obtenido luego de calcular el factor de fuga. Puede observarse como el método reportado no logra una adecuada claridad respecto a la presencia o ausencia de fuga, teniendo solamente un caso donde el factor de fuga arrojó el valor más elevado.
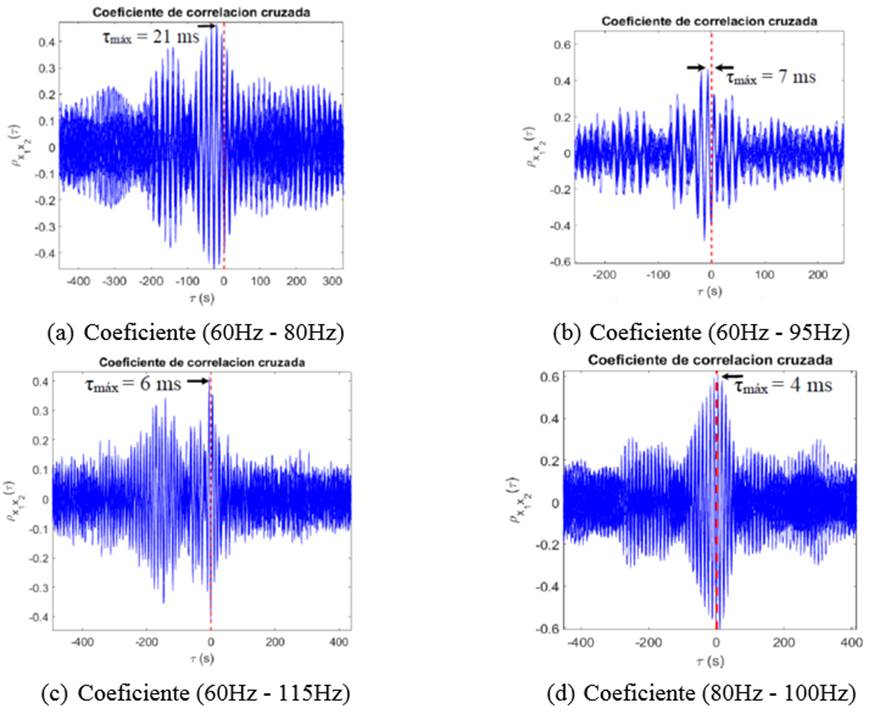
Figura 10 Coeficiente de correlación cruzada y diferencia de tiempo de llegada para los diferentes rangos de frecuencia.

La Figura 12 muestra la DEPC normalizada la cual fue computada mediante el método de [6], la Figura 13 muestra la coherencia de la señal de fuga y el ruido.
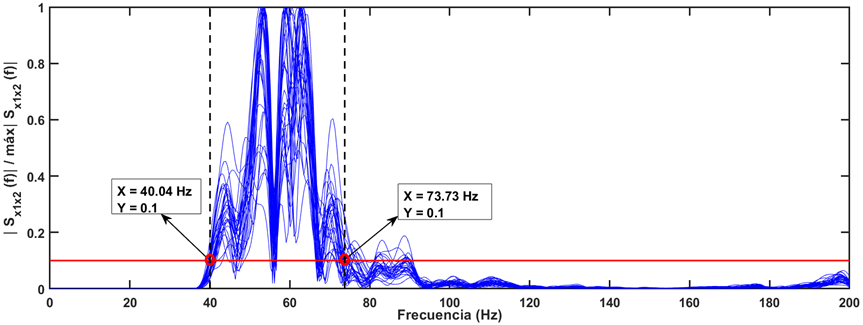
Como se observa en la Figura 12 las frecuencias de corte seleccionadas para el filtro pasa-banda mediante el método de Almeida [6] corresponden a 40.04 Hz y 73.73 Hz. En la Figura 13 como la banda de frecuencia seleccionada no es correcta debido a que la SNR es pobre provocando que el error cometido en el proceso de localización tras aplicar la función correlación cruzada aumente.
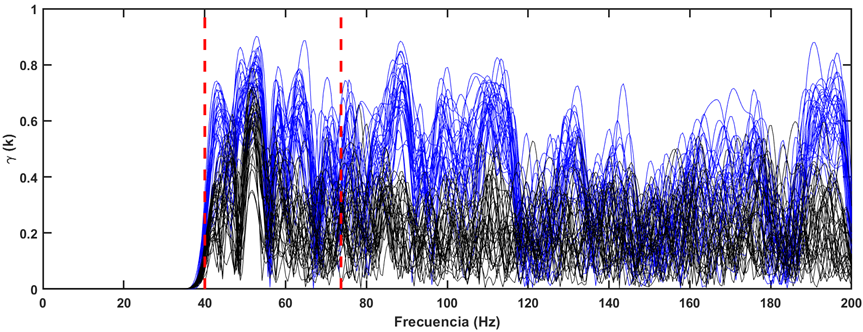
La Figura 14 muestra el resultado luego de haber computado la función coherencia a la fuga de fondo y al ruido, para poder seleccionar la banda de frecuencia donde se va a aplicar el filtro mediante el método de [7].

Se observa el ancho de banda seleccionado, para aplicar la función correlación cruzada. Se nota que a pesar de que el ancho de banda seleccionado presenta zonas donde la SNR es adecuada, cerca de 40 Hz la SNR es pobre. La gama de frecuencias seleccionada para detectar y localizar la fuga de fondo es de 40 - 115 Hz debido a que es la región donde la SNR se comporta estable.
4.4.2.- ETAPA DE LOCALIZACIÓN
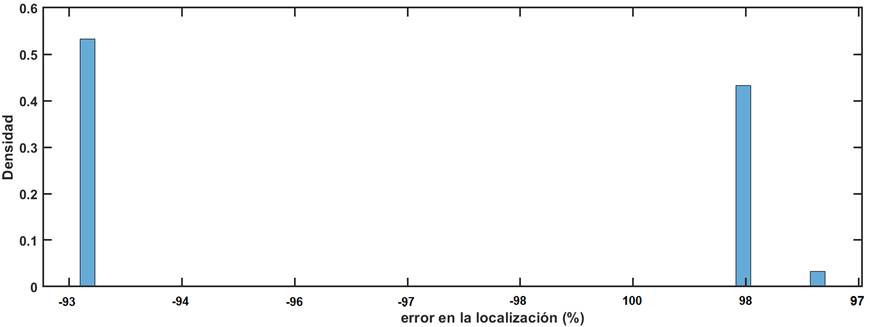
La Figura 15, 16 y 17 muestran mediante el histograma el error porcentual cometido tras estimar la ubicación de la fuga de fondo, utilizando los procedimientos reportados por [6], en [7] y en [9].
Como se evidencia en la Figura 15 el error cometido tras estimar la ubicación de la fuga de fondo está relacionado con la banda de frecuencia seleccionada en la Figura 12, pues como no se realizó una adecuada selección de la banda de frecuencia esto provocó que luego de aplicar el proceso de localización los errores fueran totalmente inaceptables.

En la Figura 16 como el error cometido una vez estimada la localización mediante el método de [7] se logra mejorar, aunque arroja valores mayores a los presentados en este artículo, el error cometido obteniendo aproximadamente un error del 8 %.
Para la aplicación del método propuesto por [9] se realizaron pruebas con una gama de factor de regulación entre 0.4 y 0.6 seleccionando 0.51 debido a que brindó el error más bajo en la estimación de la ubicación de la fuga de fondo. Además, la banda de frecuencia para aplicar el procedimiento de correlación cruzada reportado es de 40 Hz a 200 Hz debido a que el autor no brinda información sobre la selección de la banda de frecuencia para aplicar la función correlación cruzada. La Figura 17 muestra como el error empeora siendo para este caso próximo a 17 %.

La Tabla 4 muestra los resultados reportados por [11] luego de aplicar su método en un ambiente ruidoso.
La Tabla 4 revela como el menor error que comete el método propuesto por Shun Na y colaboradores es ligeramente superior al reportado en este artículo. Sin embargo la principal diferencia es que para nuestro caso la distancia d1 a la cual se encuentra ubicado el sensor de referencia es 12.31 m siendo aproximadamente el doble de la utilizada por el artículo reportado. El aumento de la distancia en un ambiente ruidoso dificulta la detección y localización de la fuga de fondo debido a que disminuye la SNR.
Tabla 4 Resultados en la localización reportados por [11].
| Distancia real (d1 + d2) | Método tradicional d1(m) | Error (%) | Método adaptativo d1(m) | Error (%) |
|---|---|---|---|---|
| 3 + 1 | 3.47 | 15.67 | 2.72 | 9.33 |
| 5 + 1 | 5.71 | 14.2 | 5.41 | 8.2 |
| 6 + 3 | 5.52 | 8.67 | 6.13 | 2.16 |
| 7 + 1 | 8.06 | 15.14 | 6.38 | 8.86 |
| 10 + 1 | 10.91 | 9.1 | 9.53 | 9.1 |
| Error promedio | 12.56 | 7.53 | ||
6.- CONCLUSIONES
En este artículo se diseñó un nuevo procedimiento que permite detectar y localizar fuga de fondo bajo un ambiente ruidoso en tuberías de agua concluyendo que:
La función coherencia es una herramienta matemática muy útil para la detección de fuga de fondo permitiendo discriminar sus componentes espectrales de las del ruido.
Aplicar la función correlación cruzada en la gama de frecuencias correspondiente al ancho de banda útil aumenta la relación señal a ruido permitiendo mejorar la precisión en la estimación del retardo de tiempo disminuyendo el error en la localización.
Se logró un error en la localización de 2.1% para una velocidad de la onda de presión acústica de 279.29 m/s.
Para validar y comparar el nuevo procedimiento se utilizaron 150 señales, divididas en dos grupos. En 90 señales se encontraba la presencia de fuga de fondo y las restantes solamente contenían ruido.

