










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
El problema de estimación la dirección de arribo de las ondas de radio (DOA, por sus siglas en inglés) es tan antiguo como su descubrimiento y posee gran incidencia en campos como los radares, sonares, comunicaciones móviles, radioastronomía, sismología y medicina. El empleo de antenas directivas para la estimación de DOA es uno de los métodos clásicos junto al de mono pulso de amplitud y/o fase, el interferómetro de Doppler y la interferometría correlativa, por solo nombrar algunos. Por otro lado, métodos más modernos basados en el procesamiento de señales de arreglos de antenas han demostrado probadas ventajas con respecto al procesamiento de los elementos independientes. Prueba de ello lo evidencia su aplicación en las antenas inteligentes [1] como es el caso de la implementación del sistema de procesamiento para aplicaciones de Identificación por Radio Frecuencia en la banda UHF [2]. La mayoría de estas ventajas viene dada por la relevancia de la información espacio-temporal aportada lo que posibilita la capacidad de procesamiento de señales coexistentes en la misma frecuencia como las interferencias co-canales con elevada resolución angular.
La estimación de DOA de alta resolución o súper resolución se alcanza cuando el método de estimación aplicado es capaz de diferenciar la dirección de las señales que se encuentran solapadas dentro del lóbulo principal de la característica direccional de arreglo de antenas. Aunque las bases teóricas fundamentales que tratan la estimación de DOA con súper resolución son cada vez más maduras, la implementación práctica de los métodos se ha visto limitada por la elevada potencia de cálculo que demandan. Particularmente en los últimos veinte años, gracias a los avances en el campo de la microelectrónica y el incremento de la capacidad de cómputo de los sistemas embebidos, ha resurgido un interés por la implementación de los métodos basados en la estimación de DOA de alta resolución. Estos han encontrado especial atención en tecnologías inalámbricas emergentes como los radares para coches auto conducidos, la Internet de las Cosas, la Identificación por Radiofrecuencia y la carrera por el dominio de las tecnologías 5G y 6G [3, 4, 5].
Actualmente un volumen importante de la literatura científica existente en este campo se enfoca principalmente en mejorar la precisión y la búsqueda de métodos de estimación de DOA de poca complejidad y su rendimiento se evalúa mayoritariamente a través de simulaciones computacionales [6]. Sin embargo, el empleo de simulaciones numéricas para calcular la exactitud de la estimación y otros parámetros de rendimiento no es suficiente. Solamente algunos estudios extienden las simulaciones computacionales a una implementación de hardware real y validación experimental para su empleo en escenarios prácticos.
En la revisión de la literatura actualizada se ha identificado que un tema medular en la implementación de sistemas de estimación de DOA modernos lo constituye la selección adecuada de la plataforma de procesamiento. Se ha determinado que para la implementación de los sistemas en cuestión predominan las soluciones basadas en Arreglos de Compuertas Programados por Campo [7, 8], Circuitos Integrados de Propósito Específico [9, 10] y Procesadores Digitales de Señales (FPGA, ASIC y DSP respectivamente por sus siglas en inglés) [11]. Las implementaciones basadas en FPGA pueden alcanzar un buen rendimiento, aunque carecen de cierta flexibilidad lo que dificulta la posibilidad del escalado del sistema con métodos más novedosos sobre todo por el consumo de recursos, los tiempos de diseño y puesta a punto. Una situación similar ocurre con las soluciones basadas en ASICs, donde se involucran procesos tecnológicos y de diseño de alta complejidad muchas veces poco accesibles para gran parte de la comunidad científica. Las implementaciones en DSP pueden ejecutar los algoritmos mediante la programación de software lo que es más flexible que las FPGA, pero a la vez pueden adolecer de un buen rendimiento. Una de las soluciones más prometedoras lo constituye la combinación DSP+FPGA debido a que aprovecha las bondades de ambas tecnologías [12]. Desafortunadamente esta arquitectura no es muy común en tarjetas de desarrollo comerciales y por lo general requieren de diseño y fabricación de hardware personalizado lo que puede encarecer y ralentizar significativamente el proceso de desarrollo.
Una variante factible en la implementación de estos sistemas constituye la combinación de una FPGA con un procesador estándar en una computadora personal (PC, por sus siglas en inglés) sobre todo por su accesibilidad en el mercado y su potencia de cálculo. Esta variante generalmente se dificulta por la necesidad de establecimiento de un enlace de datos de alta velocidad entre la FPGA y el procesador. El inconveniente anterior puede solucionarse mediante la adquisición de las señales en una FPGA y el procesamiento en una PC con hardware y software perteneciente a National Instruments [6]. La principal desventaja de esta solución es que requiere de una PC industrial altamente específica del mismo fabricante para controlar las múltiples tarjetas de adquisición de datos. Además, establece una fuerte dependencia con el software propietario y para su funcionamiento necesitan sistemas operativos en tiempo real y controladores que en la mayoría de los casos requieren licencias adicionales.
Sobre la base de la concepción anterior este trabajo tiene como principal objetivo implementar un sistema hardware-software de estimación de DOA con súper resolución que cumpla con las exigencias de los sistemas modernos. Las principales exigencias identificadas se enfocan en la resolución angular y error de la estimación, así como la capacidad de defensa ante los efectos indeseables de la propagación por multitrayecto. Las funciones de alta sensibilidad temporal se realizan en una FPGA y el resto en un procesador estándar comunicados a través de una interfaz de datos. El empleo de una interfaz de transmisión de datos de alta velocidad permite que las funciones más complejas puedan completarse por un procesador estándar, a la vez que se mantiene un rendimiento y latencia aceptables para operar en tiempo real. Las capas de software que incluye la trasmisión de datos y parte de la implementación del método se desarrollan en herramientas de software libre lo que disminuye considerablemente las dependencias de terceros. Entre las ventajas de este sistema destacan la alta flexibilidad proporcionada por la parte de software, así como la escalabilidad de la plataforma de hardware basada en elementos modulares.
La contribución científica fundamental en este trabajo lo constituye la propuesta de implementación de un sistema experimental de estimación de DOA en tiempo real basado en la combinación hardware-software con súper resolución. Además, se describen los principales criterios prácticos y de diseño para la implementación de un sistema de estimación de DOA en tiempo real. Se obtiene un banco de prueba de métodos de estimación de DOA con súper resolución altamente configurable con la posibilidad de escalarse en sus principales parámetros. Mediante el flujo de diseño basado en modelos de Simulink(Matlab) se implementan en Lenguaje de Descripción de Hardware (HDL, pos sus siglas en inglés) los cálculos más críticos de los métodos de estimación de DOA. Se implementa una solución eficiente basada en la integración de módulos de propiedad Intelectual (IP, por sus siglas en inglés) para el intercambio de datos a alta velocidad entre un dispositivo FPGA y una PC estándar a través del interfaz PCI Express. Se propone un diseño de hardware modular sobre una base tecnológica actualizada sin la necesidad de diseño de placas de circuito impreso (PCB, por sus siglas en inglés) personalizados.
Problema de la estimación de DOA
Supóngase que en un arreglo de antenas como el mostrado en la figura 1 inciden desde diferentes direcciones múltiples señales de radiofrecuencia de banda estrecha. En este caso se considera el problema unidimensional por lo que se toma como referencia un arreglo lineal uniforme (ULA, por sus siglas en inglés). Para el problema de dos o tres dimensiones es necesario el empleo de otras geometrías basadas en arreglo planos o volumétricos [13]. El problema en cuestión radica en determinar con exactitud la DOA de cada una de las señales a través del procesamiento de los voltajes inducidos en el arreglo y se asume que estas señales son ondas planas que arriban desde la zona lejana. Usualmente existen varios problemas que el sistema de estimación de DOA debe enfrentar, el primero de ellos es el ruido introducido por el canal, las imperfecciones propias del sistema como el acoplamiento mutuo entre canales, error en la posición de las antenas o efectos de la plataforma. También resaltan la alta saturación espectral del espectro radioeléctrico y las múltiples reflexiones que causan que las señales recibidas sean altamente correlacionadas, efecto que si no se tiene en cuenta puede producir resultados erróneos [14]. La exactitud de la estimación de DOA es un parámetro de vital importancia y dependiente de varios factores que incluyen la relación señal a ruido, el número de muestras disponibles, la estructura del arreglo y de los receptores, la plataforma de cálculo y el método empleado. Además, es función de la característica direccional de los elementos de antena, la resolución de los datos digitalizados, el sincronismo en el muestreo multicanal, el tiempo de cálculo y la implementación del método entre otros.
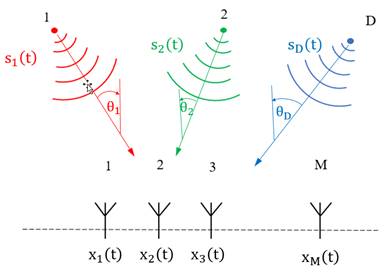
Fig. 1 Estimación de la dirección de arribo de D emisores en el espacio por un arreglo de M antenas.
Modelo de las señales
El modelo de las señales que se reciben en un arreglo de antenas relaciona los datos recibidos en cada uno de los canales con las señales emitidas por las fuentes emisoras distribuidas en el espacio. Tal y como muestra en la figura 1, si se considera que al arreglo compuesto por M antenas, inciden las señales s
d
(t) provenientes de D fuentes emisoras desde las direcciones (
d
, la señal recibida en cada canal de recepción puede modelarse según la ecuación (1). Donde  es el vector de salida del arreglo de antenas y
es el vector de salida del arreglo de antenas y  es la salida del m-ésimo elemento en el instante t.
es la salida del m-ésimo elemento en el instante t.  es el vector de señales provenientes de D fuentes emisoras de señal y
es el vector de señales provenientes de D fuentes emisoras de señal y  es la d-ésima señal en el instante t.
es la d-ésima señal en el instante t.
 (1)
(1)
 (2)
(2)
 (3)
(3)

 es un vector de muestras de ruido considerado aditivo Gaussiano con media cero donde
es un vector de muestras de ruido considerado aditivo Gaussiano con media cero donde  es el ruido en el m-ésimo elemento de antena en el instante t.
es el ruido en el m-ésimo elemento de antena en el instante t.  como muestra la ecuación (2) es una matriz cuyas columnas se componen de un arreglo de vectores directivos a((d) para la d-ésima fuente de señal. Este último representa los cambios relativos de amplitud y fase que experimentan los frentes de onda de las señales cuando incide en cada una de las antenas del arreglo. Para el caso de un ULA, a((d) se expresa de acuerdo a la ecuación (3), donde (es la longitud de onda de la señal, l es la distancia entre elementos del ULA y ((d) es el DOA de la d-ésima fuente emisora de señal.
como muestra la ecuación (2) es una matriz cuyas columnas se componen de un arreglo de vectores directivos a((d) para la d-ésima fuente de señal. Este último representa los cambios relativos de amplitud y fase que experimentan los frentes de onda de las señales cuando incide en cada una de las antenas del arreglo. Para el caso de un ULA, a((d) se expresa de acuerdo a la ecuación (3), donde (es la longitud de onda de la señal, l es la distancia entre elementos del ULA y ((d) es el DOA de la d-ésima fuente emisora de señal.
Selección del método de estimación de DOA
Como se mencionó anteriormente los métodos de estimación de DOA con superresolución se caracterizan por lograr resoluciones superiores al ancho del haz principal del arreglo de antenas a diferencia de los métodos basados en la formación de haces como es el caso de Capon y Bartlett [1]. Uno de los métodos que más exactitud ha mostrado en la estimación de DOA con superresolución es el de Máxima Verosimilitud (ML, por sus siglas en inglés). El problema común en los métodos de ML en general es la necesidad de solucionar un problema de optimización multidimensional no lineal, que por su complejidad computacional es prácticamente irrealizable en aplicaciones en tiempo real, además de que no necesariamente garantiza la convergencia global. En este sentido el método de Clasificación de Señales Múltiples (MUSIC, por sus siglas en inglés) [15] a pesar de ser un método sub óptimo se presenta como una solución eficiente al problema de estimación de DOA con superresolución. Este puede estimar la DOA de M−1 señales coexistentes en el mismo ancho de banda, su principal desventaja es su sensibilidad a los efectos de la propagación multitrayecto, aunque se han desarrollado técnicas de pre-procesado de las señales para solucionar esta deficiencia.
Otros métodos conocidos lo constituyen el de Estimación de Parámetros de Señal basada en Técnicas de Invarianza Rotacional y el de Ajuste del Subespacio Ponderado (ESPRIT y WSF, pos sus siglas en inglés respectivamente) [16]. El primero posee una buena exactitud en el estimado, inmunidad a los efectos del multitrayecto y mejor resolución, pero como desventaja presenta que se necesita del doble de las antenas que MUSIC para estimar el DOA del mismo número máximo de fuentes emisoras. En el caso de WSF es uno de los métodos más robustos desarrollados hasta ahora pero presenta la desventaja es que no posee solución analítica y su solución por métodos iterativos en ocasiones pueden presentar problemas de convergencia además de un mayor requerimiento de potencia de cálculo [17]. De forma general, el método MUSIC se emplea ampliamente por su capacidad de rendimiento y todas sus versiones y modificaciones se han estudiado extensivamente. Sobre la base de los criterios anteriores se selecciona el método MUSIC con la aplicación técnicas de pre-procesado de las señales para contrarrestar los efectos del multitrayecto para la implementación final del sistema propuesto.
Método music
El método MUSIC se caracteriza por explotar la información aportada por el análisis de las estructuras propias de las muestras de señal recibidas, en este caso los subespacios de señal y de ruido. Un parámetro importante en los métodos basado en subespacios es la matriz de covarianza espacial de los sensores Rx obtenida a partir de las muestras de señal como expresa la ecuación (4). Cuando las señales son no correlacionadas con el ruido, la matriz de covarianza espacial posee dos componentes, la matriz de covarianza de señal y la matriz de covarianza de ruido. Donde  es la matriz de covarianza de las fuentes emisoras. La matriz de covarianza de señal ARsAH es una matriz de dimensión MxM con rango D < M, se asume que la potencia de ruido es igual en todos los elementos del arreglo y este es no correlacionado de uno a otro. Con esta suposición la matriz de covarianza de ruido puede modelarse como una matriz diagonal de dimensión MxM con iguales valores a lo largo de la diagonal principal o sea . Si se asume que la matriz A posee rango completo en sus columnas, es decir que los vectores son linealmente independientes y que la matriz de covarianza espacial de las señales es no singular, entonces se dice que el rango de ARsAH es D, o equivalentemente que los M-D pequeños valores propios de ARsAH son iguales a cero. Si se denotan los valores propios de Rx como se puede decir por tanto que los M-D más pequeños valores propios de Rx son iguales a , o sea:
es la matriz de covarianza de las fuentes emisoras. La matriz de covarianza de señal ARsAH es una matriz de dimensión MxM con rango D < M, se asume que la potencia de ruido es igual en todos los elementos del arreglo y este es no correlacionado de uno a otro. Con esta suposición la matriz de covarianza de ruido puede modelarse como una matriz diagonal de dimensión MxM con iguales valores a lo largo de la diagonal principal o sea . Si se asume que la matriz A posee rango completo en sus columnas, es decir que los vectores son linealmente independientes y que la matriz de covarianza espacial de las señales es no singular, entonces se dice que el rango de ARsAH es D, o equivalentemente que los M-D pequeños valores propios de ARsAH son iguales a cero. Si se denotan los valores propios de Rx como se puede decir por tanto que los M-D más pequeños valores propios de Rx son iguales a , o sea:  .
.
En la práctica Rx se desconoce, por lo que un buen estimado de la anterior lo constituye el promedio de múltiples muestras T a partir de X(t), como se muestra en la ecuación (5). En su forma estándar, el método también conocido como MUSIC espectral, estima el subespacio de ruido de las muestras disponibles mediante la descomposición en los valores propios de la matriz de covarianza espacial estimada. Una vez que el subespacio de ruido se estima, se realiza un escaneo en el sector angular de interés mediante la búsqueda de vectores directivos del arreglo que son ortogonales al subespacio de ruido. Esto normalmente se acompaña de la búsqueda de máximos locales en el espectro de MUSIC generado por la ecuación (6).
 (4)
(4)
 (5)
(5)
 (6)
(6)
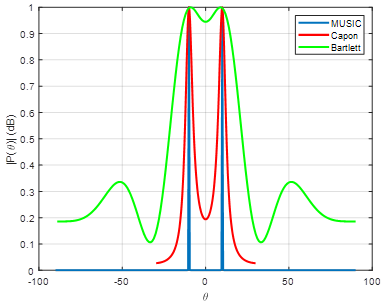
donde: UN denota una matriz de dimensión Mx (M ( D) con M ( D columnas compuesta por los vectores propios correspondientes a los M ( D valores propios más pequeños de Rx y a(() es la matriz de respuestas de amplitud y fase del arreglo para cada una de las direcciones a analizar. En la figura 2 se muestra el espectro angular obtenido mediante el método MUSIC junto con el de Capon y Bartlett con un ULA de 4 elementos al que arriban las señales de dos fuentes emisoras con 20 ° de separación (10 y -10 °). Se puede apreciar la elevada resolución angular de MUSIC frente al de Bartlett y Capon. Cuando existe el efecto de multitrayecto las señales recibidas de múltiples fuentes pueden llegar a ser parcialmente correlacionadas e incluso completamente correlacionadas (señales coherentes). Este efecto provoca que la matriz Rx no sea de rango completo y por lo tanto el rendimiento del método MUSIC se ve degradado significativamente en dependencia del grado de correlación entre las señales incidentes. Una de las técnicas de pre-procesamiento más conocidas para solucionar esta deficiencia es la que se denomina suavizado espacial a los datos recibidos [18].
La aplicación de esta técnica tiene como desventaja que empeora la resolución de la estimación debido a la disminución del número efectivo de elementos del arreglo por lo que su aplicación constituye una relación de compromiso. Para aplicar el suavizado espacial es necesario dividir el arreglo en P sub-arreglos, luego se calculan de forma independiente cada una de las matrices de covarianza de los sub-arreglos y después son promediadas por P. Es decir, la nueva matriz de covarianza se suaviza mediante la promediación de las P matrices de covarianza, tal como se muestra en la ecuación (7). En dependencia del orden de los sub-arreglos escogidos el suavizado puede ser hacia delante, hacia atrás o la combinación de ambos [19].
 (7)
(7)
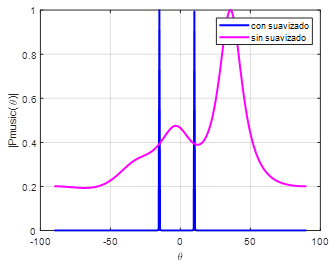
El efecto del suavizado espacial en el método MUSIC en un ULA de 4 elementos dividido en dos sub-arreglos de 3 elementos cada uno se ilustra en la figura 3. En este caso inciden dos señales altamente correlacionadas desde dos DOAs diferentes (-15 y 10°). Es evidente que MUSIC con suavizado espacial arroja los mejores resultados porque remueve la fuga espectral y proporciona una mejor resolución.
Implementación hardware-software del método seleccionado
Un requisito indispensable para la implementación de métodos de estimación de DOA con empleo del procesamiento de señales de arreglo de antenas es la recepción independiente de las señales de cada antena de manera coherente. Como muestra la figura 4, con la exigencia anterior se necesitan receptores digitales multicanales que compartan un oscilador local común para la conversión de frecuencias y la misma señal de reloj de muestreo de las señales.
Las señales de radiofrecuencia (RF) inducidas en el arreglo de antenas se mezclan con un oscilador local común para trasladarse a un rango de las frecuencias operable por los conversores análogos-digitales. Posteriormente las señales digitalizadas se trasladan a banda base a través de un conversor descendente digital (DDC, por sus siglas en inglés), el proceso de conversión análogo-digital, así como los DDCs se realizan con un reloj de muestreo común. En base al esquema ilustrado en la figura 4 y con la aplicación de los criterios anteriores al método MUSIC, a groso modo se enuncian a continuación los procesos necesarios para su implementación práctica en un sistema en tiempo real:
Cálculo o medición de la matriz de respuestas del arreglo del arreglo de antenas a(() (no en tiempo real).
Recepción en RF de las señales inducidas en el arreglo de antenas.
Digitalización de las señales de salida de la etapa de RF.
Traslado de las señales recibidas a banda base con el empleo de un DDC en cuadratura de fase.
Cálculo de la matriz de covarianza espacial Rx.
A partir de Rx búsqueda de los vectores propios UN que expanden el subespacio de ruido.
Con los vectores propios del subespacio de ruido y a(() obtenido en el paso 1, calcular el espectro de MUSIC mediante la ecuación (6).
Buscar en el espectro de MUSIC los D puntos máximos y con estos los valores de DOA de las señales.
Como se aprecia, aunque MUSIC es uno de los métodos menos complejos entre los desarrollados hasta ahora en la literatura científica, aún persiste una fuerte carga computacional en el proceso de implementación. A continuación, se describen los principales criterios que se consideraron para la selección de los dispositivos programables de implementación del método.

Las operaciones requeridos hasta el cálculo de Rx se hacen un tanto compatibles con el empleo de lógica programable a base de dispositivos FPGA. En gran medida esto se debe a su alto nivel de paralelismo además de la posibilidad de descomposición operaciones más sencillas como multiplicaciones y sumas en punto fijo. Este no es el caso de los procedimientos involucrados a partir de la descomposición de los valores propios de Rx sobre todo por el volumen de operaciones y la precisión necesaria [20]. Si se establece un enlace de datos de alta velocidad con un procesador estándar, es posible transmitir los valores de la matriz de covarianza calculada en la FPGA para realizar el resto del método en software. Esta solución le proporciona al sistema de una elevada flexibilidad debido a que independiza los procesos temporalmente sensibles de los que no lo son. Además, permite el empleo de bibliotecas de programación de álgebra avanzada de software libre que disminuyen considerablemente los tiempos de implementación de los métodos de estimación. Es por ello que el sistema concebido empleará una arquitectura híbrida mediante la combinación de elementos de hardware y software.
Selección de los elementos de hardware y diseño en HDL
Como se explicó anteriormente, la implementación de los métodos de estimación de DOA con súper resolución necesitan un receptor digital por cada antena. La exigencia anterior condiciona la selección adecuada de los elementos de hardware para no encarecer significativamente una implementación práctica. Los avances en la microelectrónica actualmente permiten la fusión en un solo chip de funciones que hace una década se realizaban en componentes de gran volumen por separado. Gracias al desarrollo de los receptores definidos por software hoy en día están disponibles en el mercado dispositivos que integran la transmisión, recepción, control de ganancia, digitalización y filtrado digital de señales de radiofrecuencia en un gran ancho de banda de trabajo. Ejemplo de esto lo constituye la familia de transceptores integrados AD93XX y ADRV93XX de Analog Devices. Para el rápido desarrollo de prototipos de aplicaciones con empleo de tales dispositivos están disponibles tarjetas de evaluación que posibilitan el desarrollo de aplicaciones prácticas en un relativo corto período de tiempo, además facilitan el desarrollo modular.
Para el presente trabajo se seleccionó la placa de evaluación ARRadio, esta porta un transceptor integrado AD9361 que cubre el rango de frecuencias de 70 MHz a 6 GHz, posee dos canales transmisores y dos receptores con un ancho de banda instantáneo de 56 MHz. El sistema receptor del ARRadio entrega a su salida las señales en banda base formada por sus componentes ortogonales digitales I y Q a través de un conector de alta velocidad HSMC. Para emplear múltiples ARRadios en una misma placa de FPGA se necesitan varios conectores HSMC y múltiples salidas de reloj. Es por ello que para el control de las placas ARRadio y el procesamiento digital de las señales se empleó el kit de desarrollo TR4 de Terasic. El TR4 porta un dispositivo Stratix IV de Altera (Intel), posee 6 conectores HSMC, dos interfaces PCI Express y cinco conectores SMA para la entrada/salida de reloj. El enlace de los datos con la computadora de escritorio se realizará a través de uno de los conectores PCI Express. Para esto se necesita de la tarjeta adaptadora PCA3 y el cable de conexión especial PCIe x4 Cable, ambos de Terasic. En la figura 5 se muestra un esquema general de la conexión entre los diferentes elementos, así como un esquema funcional del diseño en HDL implementado en el dispositivo programable. En general, el diseño en HDL está dividido en cinco módulos, mostradas en la figura 5.

El primer módulo cumple la función de control y programación de los transceptores integrados AD9361 con empleo de un procesador empotrado Nios II de Intel de segunda generación (versión Fast). El segundo módulo realiza el desentrelazado de las muestras en banda base I m , Q m a través de los bloques lógicos RxDm , , con (m = 2,2, ...,4) así como la calibración mediante la aplicación de los pesos complejos W m . El tercer módulo realiza el cálculo de la matriz de covarianza espacial compleja a partir de las muestras de las señales recibidas y calibradas X m . El cuarto módulo denominado Controlador Conduit-Avalon M-M trasforma los datos procedentes del bus R del tipo Conduit (Intel) a las especificaciones del bus Avalon M-M de Intel para integrarse como con los demás módulos IP. El quinto y último módulo está basado en un diseño de módulos IP integrados para transmitir los datos a la PC mediante Acceso Directo a Memoria (DMA, por sus siglas en inglés) a través de una interfaz PCI Express. En las próximas secciones se explicará con mayor profundidad la función específica e implementación de cada módulo.
Control de los arradios y adquisición de las señales
Como muestra la figura 5, el control de los transceptores integrados AD9361 de los dos ARRadios se realizó con un procesador empotrado Nios II de Intel. La implementación del procesador se realizó con la herramienta Qsys y la programación del software en el entorno Nios II Software Build Tools for Eclipse, ambos de la herramienta computacional Intel Quartus Prime 17.0. La configuración de los registros internos del AD9361 se realizó a través de los pines del interfaz de comunicación SPI presentes en los conectores HSMC de las tarjetas ARRadio. El diseño de la recepción de los datos entrelazados de las 4 componentes de los dos receptores se implementó a una frecuencia de reloj de 20 MHz. Ambos AD9361 se configuraron para recibir las muestras I/Q de salida multiplexadas por división de tiempo a través de un bus de 12 bits en formato CMOS con salida simple. Luego del des-entrelazado de las muestras cada una de las componentes en cuadratura de fase de las señales se obtienen en una frecuencia de muestreo de 5 MHz. También se configuraron los registros del sincronismo multi-chip para mantener la coherencia en el muestreo de las señales de entrada de todos los canales receptores.
Posterior a la recepción de los datos se incorporó la implementación de la calibración de las diferencias de amplitud y fase de cada uno de los canales receptores. La calibración de las diferencias de amplitud y fases entre canales garantiza la coherencia entre canales. Para su implementación se empleó el método basado en la Transformada Rápida de Fourier (FFT, por sus siglas en inglés) [21]. Este consiste en la inyección de una señal sinusoidal de calibración a cada uno de los canales receptores través de un divisor de potencia de radiofrecuencia. Posteriormente, la diferencia en amplitud entre canales se obtiene a partir del valor máximo del módulo de la FFT y la diferencia de fase a partir del argumento de las componentes reales e imaginaria del espectro en este punto. Los pesos de calibración, denominados W m y compuestos tanto por las diferencias de amplitud como las de fases, se aplican mediante la multiplicación compleja conjugada a las señales recibidas.
Diseño e implementación del cálculo de la matriz de covarianza espacial en HDL
Para el cálculo de la matriz de covarianza espacial del arreglo en HDL se empleó el flujo de diseño basado en modelos de Simulink y el toolbox HDL CoderTM de Matlab. Como se muestra en la ecuación (5), el cálculo de cada uno de los valores de la matriz de covarianza puede expresarse como la suma acumulada del producto complejo conjugado de dos señales. De esta forma para asegurar el máximo paralelismo, cada uno de los valores de la matriz de covarianza se implementó de forma independiente mediante el modelo de la figura 6.
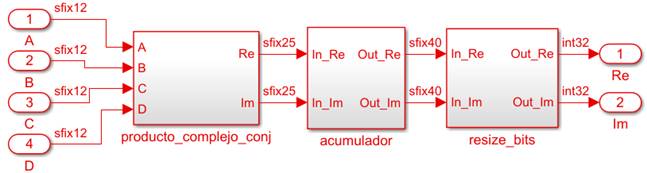
En el diseño se empleó la notación en punto fijo, las señales de 12 bits luego de la multiplicación compleja se extienden a 28 bits y a 40 bits en el diseño del acumulador. Luego de la acumulación el valor se promedia por lo que el ancho de 28 bits se restablece nuevamente. Para una compatibilidad con el sistema de transmisión de datos, las muestras de 28 bits se estandarizan a enteros con signo de 32 bits. A partir del modelo obtenido se generó el código HDL con las restricciones temporales necesarias y se comprobó en Quartus Prime 17.0. Una vez que se calculan los valores de la matriz de covarianza espacial, se agrupan en un bus denominado R de 256 bits y se envían a través de la interfaz PCI Express a la computadora para continuar los cálculos restantes del método.
Conversión y transmisión de los datos a través del interfaz pci express 4x
La transmisión de los datos a través del interfaz PCI Express consta de dos componentes, uno es el diseño en hardware programable del controlador y el otro es el de software. Como se mostró en la figura 5, el hardware necesario para enlazar la computadora con la placa TR4 es la tarjeta adaptadora. Esta es una tarjeta de conversión para conectar kits de desarrollo con FPGAs y computadoras de escritorio a través del cable Downstream x4 PCI Express. Soporta la norma PCIe 3.0 y puede alcanzar hasta 8 Gbps de velocidad de transmisión. Con este propósito se diseñó el módulo IP de un controlador que transfiere los valores de la matriz de covarianza espacial R x al primer bus de una memoria doble puerto. El segundo bus se lee por el controlador SGDMA modular y los datos se transfieren a través del módulo IP_Compiler for PCI Express.
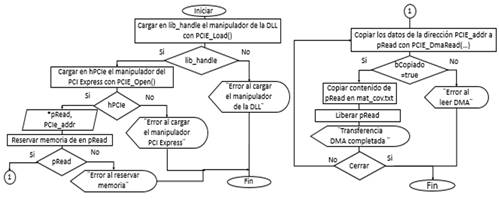
Para implementar la recepción de los datos en la PC se empleó la herramienta Qt Creator 5.7 y las dependencias proporcionados de forma libre por el fabricante. Se decidió implementar el software de lectura de los datos del hardware de forma separada al software de aplicación para mantener la mínima latencia. Por tal motivo este no posee interfaz gráfica y se ejecuta en segundo plano como un servicio con el diagrama de flujo de la figura 7.
Programación final del método de estimación de DOA en el software de aplicación
El desarrollo de la aplicación tiene como objetivo representar en tiempo real el espectro de MUSIC a partir de los datos recibidos por el servicio de recepción de datos a través de la interfaz PCI Express.

Fig. 8 Diagrama de flujo del método de cálculo del espectro de MUSIC (a la izquierda) y su representación en la interfaz de usuario (a la derecha).
Para el desarrollo de la aplicación también se empleó el marco de trabajo Qt Creator 5.7, el núcleo de la implementación en software del método se realizó con la biblioteca de software libre para cálculos de álgebra avanzada Eigen Library. El cálculo de la matriz de respuestas del arreglo de antenas a(() se realizó de forma analítica mediante la expresión (3). A la izquierda de la figura 8 se muestra el diagrama de flujo del programa implementado y a la derecha la interfaz gráfica diseñada, en esta se muestra el espectro de MUSIC resultante de una fuente emisora ubicada en el centro del arreglo.
Pruebas experimentales al sistema implementado
Las pruebas experimentales están orientadas a comprobar de forma práctica la efectividad del sistema implementado en términos de resolución, raíz del error cuadrático medio (RMSE, por sus siglas en inglés) e inmunidad a los efectos indeseables de la propagación por múltiples trayectos. Con este objetivo se diseñó y fabricó un ULA de 4 antenas monopolos separados a 6 cm y se seleccionó como frecuencia máxima el valor de 2.5 GHz lo que representa una separación de media longitud de onda. Una imagen de la interconexión de cada uno de los subsistemas se muestra en la parte izquierda de la figura 9, cada uno de los monopolos se conectó mediante cable coaxial del tipo RG-316 a los receptores de las tarjetas ARRadio. El primer y segundo monopolo denotados como Ax1 y Ax2 respectivamente, se conectaron al primer y segundo receptor de la tarjeta ARRadio 1 en ese orden, en este caso Rx1 y Rx2. De igual forma los monopolos denominados Ax3 y Ax4 se conectaron a Rx3 y Rx4 del ARRadio 2 respectivamente.
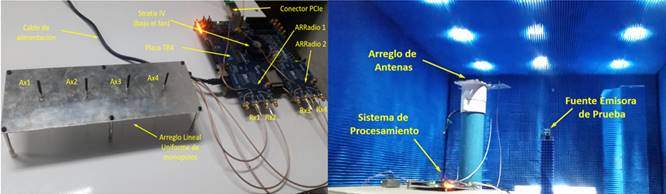
Fig. 9 Apariencia externa del sistema de estimación de DOA implementado. A la izquierda el sistema durante las pruebas en presencia de multitrayecto y a la derecha en la cámara anecoica.
Para los 4 receptores integrados de los AD9361 se estableció una ganancia de 70 dB, un ancho de banda de radio frecuencia de 4 MHz y se realizaron las calibraciones internas necesarias (según la documentación) para la frecuencia de muestreo establecida, en este caso 5 MHz. Con el objetivo de garantizar la coherencia de radiofrecuencia se activó la recepción de las señales sintonizadas a la frecuencia del oscilador local externo (el doble de la frecuencia de trabajo según la documentación). La coherencia del muestreo multicanal se estableció a partir de la configuración de los registros de sincronismo multi-chip. Para la calibración de los desbalances de amplitud y fase de los canales receptores se empleó una señal sinusoidal con una frecuencia de 2.501 GHz y se inyectó a los canales receptores a través de un divisor de potencia de cuatro salidas.
En la figura 10 se muestra una captura la adquisición de señales en tiempo real del analizador embebido Signal Tap II Logical Analyzer. En un gráfico de amplitud discreta (columna izquierda) en función de las muestras temporales se representan las señales las componentes en fase de X m en banda base (Rm_I). Las señales recibidas por los cuatro receptores de los dos ARRadio poseen una frecuencia en banda base de 1 MHz muestreadas a 5 MHz. En la figura 10a) las señales recibidas se encuentran en el estado inicial luego del encendido y configuración de los AD9361. Después de la aplicación de la calibración del desbalance en amplitud y fase de los canales receptores X m mediante los pesos W m , el valor medio de desbalance de fase final resultó de 2.6 º y el de amplitud de 0.76 dB. En la figura 10b) se aprecia el resultado de la corrección en amplitud y fase de la señal patrón luego de la calibración.

Fig. 10 Recepción de las muestras entregadas por los receptores. a) Antes de la calibración de amplitud y fase de los canales receptores. b) Luego de la calibración de amplitud y fase de los canales receptores.
Las pruebas experimentales se dividieron en dos ensayos. En el primero se comprobaron la resolución angular y la sensibilidad del método ante el efecto del multitrayecto en un ambiente interior con múltiples reflexiones. En el segundo se analizó el RMSE de la estimación de DOA en todo el rango y en un ambiente controlado. En el primer experimento se configuraron dos fuentes emisoras y se ubicaron en posiciones angulares arbitrarias dentro del rango de exploración del ULA (180 º). La selección de las DOAs obedeció a que estas consideraran posiciones angulares tanto alejadas como próximas del centro del arreglo, así como lo suficientemente cercanas entre sí que hiciera posible la evaluación de la propiedad de súper resolución del sistema (separaciones angulares menor a 23 º para este arreglo). Debido a que en el segundo experimento se realizó en todo el sector de exploración del arreglo, en este caso solo se comprobó una combinación de cinco posiciones para ambas fuentes lo que se considera suficiente para corroborar los parámetros planteados.
Las fuentes emisoras se conformaron con una antena transmisora con polarización vertical y cada una se conectó de forma independiente al generador vectorial de señales de radiofrecuencia VSG25. Como señal moduladora se seleccionó una señal con modulación digital QAM en la frecuencia de 2.5 GHz con un flujo de datos aleatorio a 1 Mbps. La distancia de las fuentes emisoras se seleccionó de acuerdo al criterio de zona lejana, en este caso más de 8 m por lo que las ondas incidentes pueden considerarse un frente de onda plano. Se estableció una SNR de 15 dB y se emplearon 1000 muestras de señal para el procesamiento. Se realizaron 10 iteraciones para cada posición angular establecida y se calcularon los valores medios de las DOAs estimadas. Los datos arrojados en varias de las mediciones del sistema se resumen en la parte izquierda de la tabla 1. El experimento se repitió con la aplicación de las técnicas de mitigación de los efectos de la propagación por múltiples trayectos mejorar el proceso de estimación. A la derecha de la tabla 1 se resumen los resultados arrojados para las mismas posiciones angulares que el caso anterior.
Tabla 1 Valores de las mediciones de DOA de las señales de dos emisores con y sin mitigación del multitrayecto
| Sin procesar el multitrayecto | Con procesado del multitrayect | ||||||
|---|---|---|---|---|---|---|---|
| Fuente emisora 1 | Fuente emisora 2 | Fuente emisora 1 | Fuente emisora 2 | ||||
| Establecido | Estimado | Establecido | Estimado | Establecido | Estimado | Establecido | Estimado |
| 50 | 56.7 | 25 | 30.3 | 50 | 50.8 | 25 | 25.6 |
| 0 | 4.3 | -10 | -5.5 | 0 | -0.5 | -10 | -9.2 |
| -10 | -15.1 | -20 | -15.2 | -10 | -10.6 | -20 | -20.4 |
| -30 | -25.2 | -35 | -38.3 | -30 | -30.4 | -35 | -34.3 |
| 60 | 66.7 | 80 | 88.9 | 60 | 63.4 | 80 | 85.5 |
En el segundo experimento se comprobó el RMSE de la estimación de DOA en una cámara anecoica con mínimo nivel de reflexiones. Se empleó la plataforma rotatoria de la cámara para comprobar el proceso de estimación de DOA de una fuente emisora de señal en el sector de exploración de 180 ° con una discreción de 5 º. Tanto los parámetros del sistema de recepción como los de la fuente emisora se configuraron con los mismos valores que en el experimento anterior salvo la distancia de la fuente emisora que fue en este caso de 11 m debido a las características físicas de la cámara. En el proceso de estimación de DOA se emplearon 10 iteraciones para cada posición, el RMSE calculado se muestra en la figura 11.
Resultados y discusiones
Con respecto a los resultados obtenidos en la calibración de amplitud y fase estos se consideran permisibles, en la mayor parte de la literatura se plantea que diferencias de fase y amplitud entre canales por debajo de 5 º y 1 dB respectivamente, se consideran uniformes [21]. Sobre la base de los resultados arrojados en la tabla 1, antes de la aplicación de las técnicas de mitigación del multitrayecto se obtuvo un RMSE de aproximadamente 5.52 º y 5.35 º para la fuente emisora 1 y 2 respectivamente. Debido a que el sistema es capaz de estimar las DOAs que se encuentren a una separación angular menor que el ancho del lóbulo principal del arreglo (en este caso es de aproximadamente 23 °), se corrobora la alta resolución de la estimación del sistema implementado. No obstante, se aprecia errores significativos en el valor de DOA estimado, una causa de esto lo constituye el efecto del multitrayecto como resultado de las múltiples reflexiones en el entorno. Luego de la aplicación de las técnicas de suavizado espacial el RMSE promedio de estimación de DOA para la fuente emisora 1 resultó de 1.14 º y 1.6 º para la fuente emisora 2. Se aprecia que el error de estimación disminuyó considerablemente por lo que se demuestra la efectividad de la técnica de procesado con suavizado espacial de la matriz de covarianza espacial descrita en el epígrafe 2.3. Llama la atención que la estimación de DOA en las posiciones más alejadas del centro del arreglo aún presentan errores significativos, el RMSE en la quinta posición de la tabla resultó de 3.4 º y 5.5 º para la primera y segunda fuente emisora respectivamente. Estos resultados se corroboraron en el segundo experimento en la cámara anecoica para el caso de una sola fuente emisora.
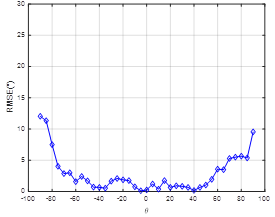
Fig. 11 RMSE en la estimación de la dirección de arribo del método MUSIC en cada una de las posiciones de las fuentes emisoras comprobadas con el sistema implementado.
Como se aprecia en la figura 11, el RMSE en el rango de -60 a 600 posee un valor promedio de 1.490 lo que se considera satisfactorio. Esta conclusión resulta de que un sector angular de 1200 es relativamente amplio con respecto al sector máximo del ULA (1800 con los elementos separados a media longitud de onda). En segundo lugar, debido a que el valor de RMSE está por debajo de los valores característicos de sistemas profesionales de estimación de DOA que normalmente oscilan en el rango de 20 a 50. También se aprecia que los errores en el rango fuera de ±600 son considerables al igual que durante las pruebas con dos fuentes de señal con múltiples reflexiones.
Las no uniformidades de la matriz de respuesta de amplitud y fase del arreglo a(() impacta significativamente en los errores de estimación de DOA y estos son más pronunciados cuando las direcciones a estimar se encuentran alejadas del centro del arreglo de antenas [22, 23]. Un método para disminuir estos errores es la calibración de estas no uniformidades mediante mediciones o simulaciones electromagnéticas para cada punto de frecuencia, su almacenamiento en una memoria no volátil y la implementación del método con la matriz calibrada. Aunque este procedimiento disminuye significativamente los errores de estimación, algunos de los inconvenientes resultan en la imposibilidad de estimar el DOA en un punto de frecuencia no calibrado, el requerimiento de almacenamiento no volátil y la imposibilidad de aplicación de métodos algebraicos eficientes para un ULA. Para este rango de estimación se consideran aceptables los resultados obtenidos de RMSE0 por lo que la calibración de la matriz de respuesta de amplitud y fase del arreglo para ampliar este rango se recomienda para trabajos posteriores.
Debe destacarse la posibilidad del escalado de los parámetros controlables que afectan la disminución de los errores obtenidos del sistema implementado. Entre los más representativos se encuentran el número de canales de recepción y la cantidad de muestras empleadas. El aumento del número de canales de recepción es posible debido a que solo se emplearon dos conectores HSMC de un total de seis, para un total de cuatro canales de recepción. Esto puede ampliarse hasta un máximo de 12 canales de recepción con el empleo de las tarjetas ARRadio en todos los conectores presentes. Por otro lado, los recursos lógicos programables utilizados del dispositivo FPGA representan un 20.6 % del total de recursos disponibles, esto condiciona el procesamiento de las señales con un mayor número de muestras lo que mejora significativamente el proceso de estimación. Además, soporta la considerable ampliación de la dimensión de la matriz de covarianza espacial con el número de canales y el consecuente incremento del volumen de operaciones que incluye la transmisión de los datos a alta velocidad.
Por otro lado, el sistema obtenido es altamente flexible en cuanto a la posibilidad de aplicación de otras técnicas y métodos de estimación de DOA incluso más modernos. El principal motivo radica en la concepción distribuida de la implementación del método de estimación. Esta se centra en que las funciones altamente dependientes de las muestras tomadas en tiempo real se implementan en el hardware programable (como es el caso de la matriz de covarianza espacial) y el resto del método se completa en software. Esta concepción facilita la aplicación de otros métodos debido a que solamente es necesario modificar el software que además está soportado en una biblioteca de álgebra avanzada que permite disminuir considerablemente los tiempos de implementación y puesta a punto.
Conclusiones
Mediante implementación un sistema hardware-software de estimación de DOA con súper resolución se exponen los principales criterios prácticos y de diseño para alcanzar las exigencias de los sistemas modernos. Los resultados experimentales demuestran la validez del método implementado, así como la efectividad de las técnicas de pre-procesamiento empleadas para luchar contra los efectos indeseables de la propagación multitrayecto. Se demuestra la aplicabilidad de un sistema de estimación de DOA con métodos de superresolución sobre una plataforma modular de hardware-software. La independencia del cálculo de la matriz de covarianza espacial en hardware con respecto al método final implementado en software flexibiliza considerablemente la aplicación de otros métodos de similar complejidad, al ser este un parámetro común en la gran mayoría de los métodos actuales de estimación de DOA con superresolución. El empleo de elementos modulares en una plataforma de hardware con suficientes recursos disponibles tanto lógicos como físicos permite que el sistema sea escalado en cuanto al número de canales y muestras a procesar. Se selecciona el método MUSIC en primera instancia para ser implementado en la plataforma diseñada, aunque la arquitectura hardware-software adoptada posibilita implementar métodos más avanzados en tiempos mínimos. El sistema implementado brinda una solución basada en hardware modular comercial sin la necesidad de la fabricación de PCB personalizados lo que disminuye considerablemente los costos de obtención final. El RMSE promedio obtenido en el rango de 1200 posibilita el empleo de este sistema en radio bases celulares dispuestas sectorialmente para cubrir los 3600 con tres arreglos de antenas. La solución propuesta permite la obtención de prototipos para la experimentación y evaluación de métodos de gran complejidad computacional en un plazo de tiempo relativamente breve.

