










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
La Armada de Chile ha sido protagonista de un importante auge en el área de la construcción naval durante los últimos años. De la mano de la planta industrial ASMAR se han desarrollado ambiciosos proyectos, de los cuales el más reciente corresponde a la construcción de un rompehielos de más de 100 metros de eslora.
Lo anterior, ha logrado consolidar nuevas capacidades técnicas del personal, ha potenciado la inversión en el astillero gracias a la adquisición de modernos equipos para los distintos talleres y le ha permitido al país, y a su Armada, desarrollarse de manera más independiente. Sin embargo, generalmente el diseño básico de los buques a construir es contratado a empresas externas de ingeniería, mientras que el diseño de detalle es realizado en el astillero con ingeniería propia.
Una forma de acercar el estudio y diseño de la arquitectura naval a los Ingenieros Navales se presenta en este trabajo, cuyo objetivo general es mostrar el proceso de diseño de un canal de ensayos hidrodinámicos para medir la resistencia al avance de embarcaciones y contribuir a la docencia e investigación en el ámbito marítimo en la Academia Politécnica Naval de Chile. Este trabajo forma parte un proyecto postulado al concurso del Fondo de Desarrollo Institucional del Ministerio de Educación el año 2018 y que le adjudicó a la Academia recursos monetarios para su implementación. Con una instalación de este tipo, el desarrollo y la innovación en el ámbito marítimo se ven fuertemente potenciados, en consecuencia directa con la completa accesibilidad que tiene el país hacia el océano. Además, el canal de ensayos puede ser complementado, con el fin de no solo ser útil para embarcaciones, sino que también prototipos de toda índole en el área marítima y oceánica, como por ejemplo generadores mareomotrices, plataformas offshore y artefactos submarinos, los cuales podrían ser modelados y estudiados en un laboratorio de este tipo. Ver Canal terminado en Anexo.
Desarrollo
Antecedentes técnicos
Para comenzar a diseñar el canal de ensayos hidrodinámicos se debió considerar una serie de aspectos técnicos relativos al arrastre de una embarcación en el agua, al roce que ésta experimenta en el medio, así como los modelos matemáticos que permiten extrapolar los resultados obtenidos en modelos a escala a embarcaciones de tamaño real. Lo anterior reviste el sustento técnico que permitió elaborar los lineamientos y definir las dimensiones y características del canal.
Resistencia al Avance del casco de una embarcación
El casco de un artefacto naval cualquiera está sometido a una serie de fuerzas que se oponen a su desplazamiento. Estas fuerzas juegan un papel fundamental a la hora de diseñar el sistema de propulsión, por ejemplo, o bien al estudiar la estabilidad y las dinámicas de dicha embarcación. Al conjunto de todas las fuerzas que se oponen al movimiento del casco de un cuerpo flotante en aguas tranquilas - es decir, sin el efecto externo del viento, mareas, olas y/o corrientes - lo llamaremos Resistencia Total al Avance. Como se puede ver en la figura 1, la resistencia al avance se debe a la suma de los siguientes efectos, que están relacionados entre sí: fricción, presión, viscosidad y generación de olas.

En el siglo XIX el ingeniero hidráulico y arquitecto naval William Froude estableció un procedimiento lo más certero posible para determinar la Resistencia al Avance que experimenta una embarcación en base a ensayos con modelos a escala. Su trabajo fundó las bases para el procedimiento establecido que un siglo después adoptó la International Towing Tank Conference, ITTC. Este último es hoy en día el modelo más utilizado por arquitectos e ingenieros navales en el mundo.
Los ensayos de modelos a escala de buques en un canal son una de las formas más utilizadas para determinar la Resistencia al Avance que experimentará un prototipo real. La experiencia indica que el coeficiente de la Resistencia al Avance de una embarcación se obtiene mediante la ecuación (1):
 (1)
(1)
 : Número de Reynolds, contiene principalmente la componente de viscosidad y en menor medida la componente de generación de olas.
: Número de Reynolds, contiene principalmente la componente de viscosidad y en menor medida la componente de generación de olas.
 : Número de Froude, asociado principalmente a la generación de olas (las olas se elevan en contra de la aceleración de gravedad g) y en menor medida a la viscosidad.
: Número de Froude, asociado principalmente a la generación de olas (las olas se elevan en contra de la aceleración de gravedad g) y en menor medida a la viscosidad.
Similitud modelo-embarcación
Para tener similitud entre las relaciones físicas de una embarcación real y su modelo a escala, se deben cumplir tres condiciones:
Similitud geométrica: todos los elementos λ i dimensionales deben ser iguales, es decir:
Ambos Re deben ser iguales:
Ambos Fr deben ser iguales:
 (3)
(3)
Luego, se desprende que no se pueden satisfacer las tres condiciones de similitud simultáneamente. El problema se puede reducir dejando Re o Fr constante. Luego, al observar la ecuación (3) queda en evidencia que bajo un régimen de Fr constante la velocidad del modelo a escala se reduce con respecto a la de la embarcación real, situación que es más aplicable para un ensayo en laboratorio.
Diseño e implementación
El proyecto de diseño fue desglosado en 4 partes: el Estanque de agua, el Carro de arrastre, el Sistema de remolque y control de velocidad, y el Sistema de adquisición de datos.
Estanque de agua
Teniendo en consideración el monto total de recursos disponibles para el proyecto, así como las dependencias disponibles en la Academia para implementar el estanque y las siguientes experiencias y recomendaciones publicadas por la ITTC:
El área de la sección transversal máxima del modelo a escala no debe exceder el 0,5% de la sección transversal del estanque.
La eslora máxima del modelo debe ser menor o igual a dos tercios del ancho del estanque.
La relación entre el ancho y la profundidad del estanque es de 2:1.
La velocidad final del modelo debe ser mantenida por al menos el tiempo suficiente, de forma tal de asegurar una correcta adquisición de datos.
Se definieron, entonces:
B TT = 1600 mm: ancho del canal
L TT = 11400 mm: largo del canal
D TT = 800 mm: nivel de agua del canal
S TT = 1,28 • 106 mm2: sección transversal del canal
Luego, sin perder generalidad, considerando el modelo a escala como un triángulo equilátero de lado a, el área de la sección transversal, SM, está restringida por, ecuación (4):
 (4)
(4)
Es decir, una manga del modelo limitada a 0,12 m.
Con las medidas del estanque definidas, se realizó el diseño en base a perfiles de acero ASTM A36 de medidas 75 x 75 x 3 mm, y planchas del mismo acero de 3 mm de espesor, todos de fácil adquisición en el comercio y bajo costo relativo. Además, e consideró incluir dos secciones laterales de vidrio en el medio longitudinal de la estructura, para poder visualizar los fenómenos que ocurren en la superficie del agua, al interior y fondo del estanque. La estructura fue seccionada en 6 partes iguales, sobre los que se realizaron los cálculos de las principales fuerzas que actúan en ella y sus elementos.
a) Base
Cada una de las seis secciones consideró una plancha base para ser el fondo del estanque de agua y bajo ésta una superficie en base a crucetas teniendo en cuenta una mayor distribución de los esfuerzos, como se puede ver en la figura 2. De esta forma, se analizaron los esfuerzos sobre la plancha de acero y sobre las vigas centrales que conforman la cruceta.
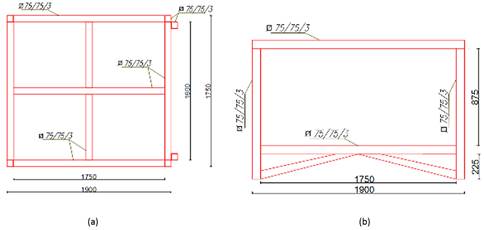 Fuente: elaboración propia.
Fuente: elaboración propia.Fig. 2 Esquema de una sección estructural. (a) Vista en planta de la estructura base. (b) Vista lateral de la estructura base.
Teniendo en cuenta la deformación en la zona sin apoyo, es decir, donde no cubre espacio la cruceta, los cálculos se hicieron dividiendo la plancha en cuatro partes iguales, de dimensiones  cada una. De esta forma, la carga distribuida, q
b
, en cada plancha pequeña, se deduce a partir de las ecuaciónes (5) y (6):
cada una. De esta forma, la carga distribuida, q
b
, en cada plancha pequeña, se deduce a partir de las ecuaciónes (5) y (6):
 (5)
(5)
 (6)
(6)
El esfuerzo máximo en la plancha de acero se puede aproximar por la ecuación (7), la que considera la máxima tensión al centro del borde empotrado menor [2].
 (7)
(7)
Donde:
σ máx,lineal |
esfuerzo máximo bajo la teoría lineal |
β e |
coeficiente adimensional, borde empotrado |
b = 0,8 m: lado menor de la plancha
a = 0,875 m: lado mayor de la plancha
h = 3 • 10 -3 m: espesor de la plancha
α = b/a = 0,914: relación de lados
Luego, como el acero ASTM A36 tiene un esfuerzo de fluencia de 250 MPa y considerando un factor de seguridad de 1,5 para el diseño estructural [3], se tiene que el esfuerzo admisible es de 166,67 MPa, por lo que, despejando el espesor, h, de la ecuación (7) se tiene la ecuación (8):
 (8)
(8)
A modo de verificación se simuló el comportamiento de la placa en el programa SOLDIWORKS. En la figura 3 se muestran los resultados.
 Fuente: elaboración propia
Fuente: elaboración propiaFig. 3 Gráfico del esfuerzo sobre una sección de plancha base, simulado en SOLIDWORKS.
b) Vigas centrales
De la misma manera, se calculó el esfuerzo que soporta cada viga central longitudinal. La viga más larga de cada sección concentra esfuerzos importantes, ya que debe soportar el peso del agua más la plancha base.
Como cada plancha de acero de 3 mm de espesor tiene una masa de 24 kg/m2 y la sección tiene una plancha de aproximadamente 1,9 m x 1,75 m se tiene que, ecuación (9):
 (9)
(9)
Y, además, la masa de agua sobre la sección equivale a, ecuación (10):
 (10)
(10)
Se tiene entonces que el peso es:

Luego, la carga distribuida sobre la viga, q v , es:

La viga se comporta como un elemento con movimientos restringidos en los bordes, ya que va soldada a la estructura. Luego, se puede realizar el diagrama de esfuerzo de corte y momento flector para verificar los puntos de la viga más tensionados [4]. La figura 4 muestra un esquema de la viga bajo una carga distribuida.

La fuerza de corte para cualquier posición x de la viga viene dada por la ecuación (11):
 (11)
(11)
La fuerza de corte máxima ocurre en los extremos:

Por otro lado, el momento flector en cualquier posición x de la viga viene dado por, ecuación (12):
 (12)
(12)
O bien, ecuación (13)
 (13)
(13)
Donde se utilizó la ecuación (14):
 (14)
(14)
Luego, el momento flector máximo ocurre en los bordes empotrados:

Además, para un perfil cuadrado hueco de dimensiones 75 x 75 x 3 mm el momento de inercia viene dado por:


Y la deflexión máxima en el centro se calcula a partir de la ecuación (15):
 (15)
(15)
Finalmente, simulando la estructura soportando el peso del agua y de la plancha base, sobre todos los perfiles y el perímetro completo de una sección de la estructura, se obtiene un esfuerzo máximo de 31,58 MPa y una deformación vertical máxima menor a 0,5 mm, como se ve en la figura 5.
 Fuente: elaboración propia.
Fuente: elaboración propia.Fig. 5 Simulación en SOLIDWORKS de los esfuerzos sobre una sección de la estructura.
c) Vidrios
Los estudios en torno a las propiedades del vidrio son bastante más acotados.
El vidrio templado ha sufrido tratamientos térmicos para aumentar su resistencia, es ampliamente usado como vidrio de seguridad y de fácil adquisición, por lo que es preferible en este caso para soportar la presión hidrostática del estanque de agua. Distintas normas orientan sobre la resistencia que puede tener el vidrio templado, por lo que se tomará el promedio de ellas a modo de referencia, equivalente a 66 MPa.
Para una placa cualquiera sumergida en un fluido se definen los siguientes conceptos ilustrados en la figura 6.

Para el caso del estanque del Canal, la placa no está sumergida en su totalidad, por lo que el valor de 𝑠 es negativo. Luego, para el sistema anterior, se cumplen las relaciones de la tabla 1.





Se aplicó el método de las secciones para determinar las fuerzas cortantes y los momentos flectores para distintos espesores de placa. Mediante el uso del Matlab se obtuvieron los resultados que a continuación se muestran:






Con la información anterior y teniendo en consideración un factor de seguridad de 4,5 casi el doble de lo recomendado en [5], se deciden utilizar placas de 12 mm de espesor.
Carro de arrastre
El diseño de la estructura del carro de arrastre está hecho a partir de perfiles rectangulares de sección 80 mm x 40 mm de aluminio AA6063-T5, aleación ampliamente utilizada en la industria, debido a su alta resistencia a los esfuerzos mecánicos y a la corrosión [6].
El carro abarca el ancho completo del Canal y se fija por un lado a una guía lineal, mientras que por el otro lado se apoya sobre dos ruedas con núcleo de aluminio y banda de poliuretano. Un esquema general del carro se observa en la figura 7.
 Fuente: elaboración propia
Fuente: elaboración propiaFig. 7 Esquema del Carro. (a) Esquema general, vista isométrica. (b) Ruedas de apoyo del Carro.
Por su parte, la guía lineal consta de un perfil de aluminio AA6063-T5 tipo C de sección 80 x 40 mm que está apernado a la parte superior de la estructura del canal y recorre toda su longitud. Sobre el perfil tipo C, dos bases rectangulares que soportan el carro tienen 6 ruedas de policarbonato. En la figura 8 se muestra un esquema general de la guía lineal.
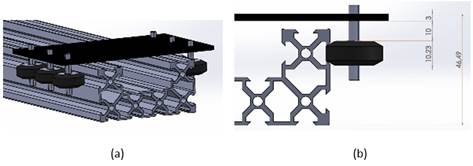 Fuente: elaboración propia
Fuente: elaboración propiaFig. 8 Esquema de la guía lineal con una base rectangular y sus 6 ruedas de policarbonato. (a) Vista en ángulo. (b) Vista frontal, cotas.
Sistema de remolque y control de velocidad
Recordando que:

Se pueden determinar los parámetros geométricos de distintos modelos a escala, así como su velocidad y número de Froude. Tomando como base algunos parámetros de buques de la Armada de Chile, se obtiene la tabla 2.
Tabla 2 Parámetros de algunos buques de la Armada de Chile. Fuente: [7]
| Fragata tipo 23 | Fragata tipo L | Fragata tipo M | Patrullero OPV | Barcaza clase Batral | Remolcador ATF | Lancha LSG | |
|---|---|---|---|---|---|---|---|
| Eslora buque (m) | 133 | 130,5 | 123,7 | 80,6 | 79,4 | 58,3 | 33 |
| Manga buque (m) | 16,1 | 14,6 | 14,37 | 13 | 13,5 | 12,2 | 6,6 |

|
134 | 122 | 120 | 108 | 112 | 102 | 55 |
| Eslora modelo (m) | 0,99 | 1,07 | 1,03 | 0,75 | 0,71 | 0,57 | 0,6 |
| Manga modelo (m) | 0,12 | 0,12 | 0,12 | 0,12 | 0,12 | 0,12 | 0,12 |

|
0,67 | 0,70 | 0,70 | 0,74 | 0,73 | 0,77 | 1,03 |

|
0,215 | 0,216 | 0,220 | 0,273 | 0,277 | 0,326 | 0,425 |
Luego, manteniendo un margen para la velocidad de remolque de hasta el doble de la máxima estimada en la tabla 2, se tiene que el sistema debe ser capaz de remolcar el carro hasta una velocidad lineal de 2 m/s.
Por otro lado, considerando el coeficiente de roce de las ruedas de poliuretano y policarbonato con metal, 0,5 y 0,3 respectivamente, la masa del carro, 14,175 kg, y las siguientes cinco fuerzas que el sistema de remolque debe vencer:
F1, F2: fuerzas de fricción debido a las dos ruedas de apoyo.
F3, F4: fuerzas de fricción debido a los dos puntos de apoyo de la guía lineal.
F5: resistencia al avance del modelo.
F: fuerza de remolque.
Se tiene que:
 (16)
(16)
 (17)
(17)
Consolidando la información publicada en [8, 9, 10, 11, 12, 13, 14], se puede estimar que este Canal tendrá valores de resistencia al avance no mayores a 30 N, por lo que, considerando factores de seguridad al cálculo se establecerá un valor máximo de F5 igual a 50 N.
De esta forma, para que el Carro avance con velocidad constante la fuerza de remolque viene dada por:

Luego, si la velocidad lineal máxima del Carro es de 2 m/s, la potencia de remolque, PR, debe ser, ecuación 18:
 (18)
(18)
Para tener control sobre un motor de inducción, se consideró un Variador de Frecuencia, VFD, capaz de ajustar la velocidad de salida del motor eléctrico.
Se debe tener en cuenta, que cada uno de los elementos descritos anteriormente tiene pérdidas de energía asociadas, cuya eficiencia, η, aproximada se muestra en la tabla 3.
Tabla 3 Eficiencia de los elementos asociados. [15, 16, 17]
| Equipo |
|
|---|---|
| Motor de inducción comercial | 65 |
| Reductor de velocidad | > 89 |
| VFD | > 74 |
| Polea con cable | > 90 |
De esta manera, la potencia máxima requerida para el motor viene dada por la ecuación (19):
 (19)
(19)
Además, siguiendo un esquema típico de dimensionamiento de la potencia de un motor eléctrico, se debe aumentar en un 20 % el valor calculado y luego aproximar al equipo más cercano de mayor potencia disponible en el comercio. Entonces, [18]

Sistema de adquisición de datos
El objetivo del Sistema de Adquisición de Datos es, no solo capturar y almacenar toda la información proveniente de los distintos sensores, sino que también procesarla y mostrarla al usuario de forma simple y útil.
Se utilizaron elementos de electrónica de bajo costo relativo y fácil adquisición en el comercio local. Los componentes principales son los siguientes:
Tarjeta Arduino: actúa como placa base para conectar los demás dispositivos, recibir, procesar y entregar la información necesaria.
Módulo Wifi: permite enviar la información a otra estación de trabajo que será la encargada de recibir todos los datos enviados por la tarjeta Arduino desde los distintos sensores del Canal, procesarla y mostrar los resultados en una pantalla de TV.
Celda de carga y Conversor A/D: corresponde a un transductor que convierte una fuerza mecánica en una señal eléctrica, a través de una o más galgas que posee en su interior dispuestas en un puente Wheatstone. Esta configuración permite detectar de forma muy precisa pequeños cambios en la resistencia eléctrica de un conductor, provocadas tras someterlo a tensión. Se utilizó un conversor A/D para que el microcontrolador Arduino interprete los datos de la Celda de carga.
Sensor de temperatura: la sonda de temperatura se utilizará para medir la temperatura a una profundidad igual a la mitad del calado del modelo a escala, según lo recomendado por la ITTC.
Sensor de ultrasonido: se utilizará el sensor de ultrasonido para que el motor se detenga cuando el Carro haya llegado al final del Canal.
Fue posible implementar un laboratorio de estas características con recursos muy limitados comparativamente a las evaluaciones económicas de proyectos de esta índole.
El proyecto de implementación del Canal de Ensayos Hidrodinámicos para medir la Resistencia al Avance de embarcaciones fue ejecutado durante el año 2019 y 2020, permitiendo su inauguración y entrega oficial a la Academia Politécnica Naval.
Conclusiones
Se elaboró el diseño y las especificaciones técnicas del estanque de agua del Canal de Ensayos Hidrodinámicos, permitiendo su implementación a bordo de la Academia.
Fue posible diseñar el Carro de arrastre y el Sistema de remolque y control de velocidad, logrando combinar los requerimientos técnicos, las limitaciones físicas y los recursos disponibles.
El Sistema de adquisición de datos fue diseñado, implementado y probado a través de un software y un hardware Open Source, permitiendo así su futura manipulación si se requiere, sin la necesidad de destinar recursos para comprar licencias o para contratar servicios de ingeniería.
Se plantearon las potenciales capacidades factibles de ser implementadas en el laboratorio con el objetivo de promover su mejora continua.


