










 Serviços customizados
Serviços customizados Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkIntroducción
Términos como Fábrica Inteligente e Industria 4.0 son conceptos emergentes que describen la aplicación en el entorno industrial y empresarial de un amplio conjunto de tecnologías relacionadas con la digitalización, la conectividad y la automatización [1]. Estas tecnologías incluyen el Internet de las Cosas (IoT), la Computación en la Nube (Cloud Computing), Manejo de Grandes Cantidades de Datos (Big Data), Inteligencia Artificial (IA), la Robótica (R), las Cadenas de Bloques (Blockchain) y la Ciberseguridad (Cybersecurity) y se caracterizan por sistemas cada vez más conectados y mayor integración de las tecnologías digitales en diferentes procesos [2].
Las practicas industriales y empresariales evolucionan en paralelo a esta innovación tecnológica y están surgiendo nuevos modelos de negocio con productos inteligentes que exigen un cambio hacia los servicios digitales. Este nivel superior de integración permite niveles más altos de productividad, productos finales más competitivos, y excelente cumplimiento de las normas de seguridad industrial.
Sin embargo, para lograr estos importantes beneficios comerciales, dos cuestiones cruciales aumentan su riesgo y deben ser atendidas con prioridad: la ciberseguridad industrial [3, 4, 5] y la ocurrencia de fallos debido a sus efectos adversos sobre la seguridad industrial, la productividad y los gastos operativos [6, 7, 8].
Para hacer frente a estos problemas, las plantas industriales deben estar equipado con sistemas de monitoreo de condición para la detección temprana y localización de ataques cibernéticos y fallos. Esto ha guiado una gran cantidad de investigaciones sobre estos temas en los últimos años sin embargo se abordan de forma independiente [9, 10, 11]. Por otra parte, para lograr el mejor rendimiento en el proceso de diagnóstico, las clases que representan los modos de operación de la planta industrial deben estar muy bien identificadas [12]. Sin embargo, este es un tema muy complejo debido a las incertidumbres que caracterizan las mediciones industriales por el efecto del ruido y las perturbaciones.
En la literatura científica, la detección y localización de ciberataques y los esquemas de diagnóstico de fallos se clasifican en: métodos basados en modelos y basados en datos [13, 14]. El uso exitoso de los métodos basados en modelos de proceso depende de una comprensión profunda del proceso, su funcionamiento, parámetros y modos de funcionamiento. Sin embargo, la gran complejidad de las plantas industriales actuales dificulta el logro de este conocimiento. El segundo grupo incluye los métodos basados en datos, que no necesitan un modelo matemático preciso o un conocimiento profundo inicial de los parámetros del proceso y la correlación entre variables [15, 16, 17, 18]. Los avances en las tecnologías de Internet de las Cosas (IoT) y el Big Data han permitido actualmente una mayor atención y resultados en este último enfoque [19, 20, 21].
Una revisión de las estrategias de monitoreo de condición en los últimos años muestra un aumento considerable en el uso de técnicas de Inteligencia Artificial (IA). Las técnicas de IA pueden identificar fácilmente el problema presente en la aplicación y pueden tomar medidas sólidas. También se utiliza para procesar la gran cantidad de información que los usuarios generan a diario. El aprendizaje profundo es una de las poderosas técnicas de aprendizaje automático impulsadas por la IA. Las técnicas de aprendizaje profundo pueden procesar una gran cantidad de información presente en los conjuntos de datos de los sistemas de monitoreo de manera eficiente [22]. Estas técnicas tienen en cuenta las incertidumbres e imprecisiones presentes en los datos durante el entrenamiento y la validación para superar la superposición entre las clases de fallos y ataques. Por lo tanto, esto permite mejorar la eficiencia y la robustez contra incertidumbres, lo que proporciona una mejor precisión en la clasificación de fallos y ataques en comparación con otras técnicas existentes.
La revisión de la literatura científica actual también mostró que la detección y localización de fallos y ciberataques se han abordado por separado a pesar de ser objetivos del sistema de monitoreo de condición [11, 20, 23, 24, 25]. En este trabajo se propone una nueva estrategia de monitorización de condiciones mediante técnicas de aprendizaje profundo que aborda integralmente el diagnóstico de fallos y ciberataques en plantas industriales. La principal contribución de este trabajo es presentar una estrategia robusta de monitoreo de condición frente a perturbaciones externas y ruido, con la capacidad de detectar y localizar la ocurrencia de fallos y ataques cibernéticos. Para ello, se presenta un esquema basado en el uso de algoritmos de aprendizaje profundo. Los experimentos desarrollados mostraron un alto rendimiento de la estrategia propuesta en presencia de ruido.
La estructura del documento es la siguiente: la Sección 2 sobre Materiales y Métodos describe las características generales sobre las técnicas de aprendizaje profundo, en particular Redes Neuronales Recurrentes (RNN). Además, se presenta el esquema de monitoreo propuesto utilizando una red Long Short-Term Memory (LSTM) y se realiza la descripción del proceso Tennessee Eastman (TE) usado para validar los experimentos realizados. En la Sección 3 se analizan y discuten los resultados obtenidos. Por último, se exponen las conclusiones.
Materiales y Métodos
Características generales sobre las técnicas de aprendizaje profundo
Los enfoques de aprendizaje profundo se pueden clasificar de la siguiente manera: supervisados, semisupervisados o parcialmente supervisado y no supervisado. Además, hay otra categoría de enfoque de aprendizaje llamados Aprendizaje por Refuerzo (RL) o RL Profundo (DRL) que a menudo se discuten bajo el alcance de enfoques de aprendizaje semisupervisados o, a veces, no supervisados [22, 25].
El aprendizaje supervisado es una técnica de aprendizaje que utiliza datos etiquetados. En el caso de los enfoques de aprendizaje profundo supervisados, el entorno tiene un conjunto de entradas y salidas correspondientes  . Por ejemplo, si para la entrada x t , el agente inteligente predice
. Por ejemplo, si para la entrada x t , el agente inteligente predice  , el agente recibirá un valor de pérdida
, el agente recibirá un valor de pérdida  . A continuación, el agente modificará iterativamente los parámetros de red para una mejor aproximación de las salidas deseadas. Después de un entrenamiento exitoso, el agente podrá obtener las respuestas correctas a las preguntas del entorno. Existen diferentes enfoques de aprendizaje supervisado para el aprendizaje profundo, incluidas las Redes Neuronales Profundas (DNN), las Redes Neuronales Convolucionales (CNN), Redes Neuronales Recurrentes (RNN), incluida la de Memoria a Largo Corto Plazo (LSTM) y las Unidades Recurrentes Cerradas (GRU).
. A continuación, el agente modificará iterativamente los parámetros de red para una mejor aproximación de las salidas deseadas. Después de un entrenamiento exitoso, el agente podrá obtener las respuestas correctas a las preguntas del entorno. Existen diferentes enfoques de aprendizaje supervisado para el aprendizaje profundo, incluidas las Redes Neuronales Profundas (DNN), las Redes Neuronales Convolucionales (CNN), Redes Neuronales Recurrentes (RNN), incluida la de Memoria a Largo Corto Plazo (LSTM) y las Unidades Recurrentes Cerradas (GRU).
El aprendizaje semisupervisado es el aprendizaje que se produce en función de conjuntos de datos parcialmente etiquetados. En algunos casos, DRL y Generative Adversarial Networks (GAN) se utilizan como técnicas de aprendizaje semisupervisado. Además, las RNN, también se utilizan para el aprendizaje semisupervisado.
Los sistemas de aprendizaje no supervisado son aquellos que funcionan sin la presencia de etiquetas de datos. En este caso, el agente aprende la representación interna o las características importantes para descubrir relaciones o estructuras desconocidas dentro de los datos de entrada. A menudo, la agrupación, la reducción de la dimensionalidad y las técnicas generativas se consideran enfoques de aprendizaje no supervisado.
Redes Neuronales Recurrentes (RNN)
Normalmente el aprendizaje de algún conocimiento nuevo está basado en la comprensión y aprendizaje de conocimientos anteriores. Los enfoques tradicionales de redes neuronales, incluidas las DNN y las CNN, no pueden lidiar con este tipo de problema. Las redes neuronales estándar y CNN son incapaces de lograrlo debido a las siguientes razones. Primero, estos enfoques solo manejan un vector de tamaño fijo como entrada (por ejemplo, una imagen o un cuadro de video) y producen un vector de tamaño fijo como salida (por ejemplo, probabilidades de diferentes clases). En segundo lugar, esos modelos operan con un número fijo de pasos computacionales (por ejemplo, el número de capas en el modelo). Las RNN son únicas, ya que permiten la operación sobre una secuencia de vectores a lo largo del tiempo. Long Short-Term Memory (LSTM) es uno de los modelos de aprendizaje profundo más efectivos en el procesamiento secuencial de datos. Es considerada la forma especializada de la Red Neuronal Recurrente (RNN) que puede almacenar información en una célula de memoria durante un período más prolongado [6, 8].
Una celda LSTM tiene tres puertas: olvido, entrada y salida que controlan y protegen los estados de la celda. Las puertas controlan el acceso y el flujo de información en la celda de memoria y evitan que la información almacenada sea sobrescrita con información irrelevante. Al igual que RNN, LSTM tiene una capa de entrada que se muestra como
x
t
, y la salida se muestra como
h
t
en el tiempo
t.
LSTM toma el estado de entrada de la celda actual  , estado de salida de celdas anteriores
C
t-1
y genera un estado de salida de
C
t
. La Figura 1 muestra el diagrama de arquitectura de una celda LSTM, donde puede apreciarse las tres puertas como: puerta de entrada (
i
t
), puerta de olvido (
f
t
) y salida (
o
t
), respectivamente [23].
, estado de salida de celdas anteriores
C
t-1
y genera un estado de salida de
C
t
. La Figura 1 muestra el diagrama de arquitectura de una celda LSTM, donde puede apreciarse las tres puertas como: puerta de entrada (
i
t
), puerta de olvido (
f
t
) y salida (
o
t
), respectivamente [23].
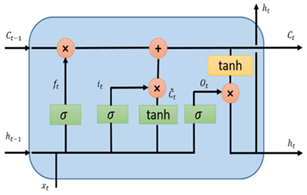
Las ecuaciones 1-4 representan la operación de LSTM, donde f i (t) en la ecuación (1) representa la puerta de olvido en el paso de tiempo t en la celda i. Se aplica una función sigmoide 𝜎 para establecer el valor de peso entre 0 y 1. En el paso de tiempo t, x(t) representa el vector de entrada actual y h(t) representa el vector en la capa oculta. Los bias 𝐛 𝐟 , 𝐛 𝐠 , 𝐛 𝐨 se agregan a todas las células LSTM. Los pesos de entrada U f , U g , U o se agregan a las entradas actuales y a los pesos recurrentes W f , W g , W o se agregan a los vectores de la capa oculta. La ecuación (2) muestra el estado interno de una celda LSTM, y la ecuación (3) presenta la unidad de puerta de entrada externa g i (t) . La ecuación (4) representa la puerta de salida q i (t) en el paso de tiempo t
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
Metodología propuesta
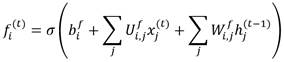
Para entrenar una red neuronal que puede detectar y localizar los fallos y ciberataques en un proceso industrial debe seguirse el siguiente flujo de trabajo: i) Preprocesar los datos ii) Diseñar la arquitectura de la red iii) Entrenar la red y iv) Realizar validación. La Figura 2 muestra el esquema general de monitoreo propuesto para detectar y localizar la ocurrencia de fallos y ataques cibernéticos en un sistema industrial.
En la etapa de preprocesamiento lo primero es normalizar los datos para asegurar que una variable con un valor mayor no domine otras variables sin perder ninguna información importante requerida para el entrenamiento. Posteriormente, se dividen los datos en datos de entrenamiento y validación dedicando para esta última acción el 20 por ciento del total de los datos. El uso de un conjunto de datos de validación permite evaluar el ajuste del modelo con el conjunto de datos de entrenamiento mientras se ajustan los parámetros del modelo. En el entrenamiento hay que evitar que la red se sobreajuste y pierda capacidad de generalización. Finalizado el entrenamiento, se ejecuta la validación y se predice el estado en el que se encuentra el proceso, calculando la precisión (accuracy) para cada clase.
Caso de Estudio: Tennessee Eastman (TE)
Descripción del proceso
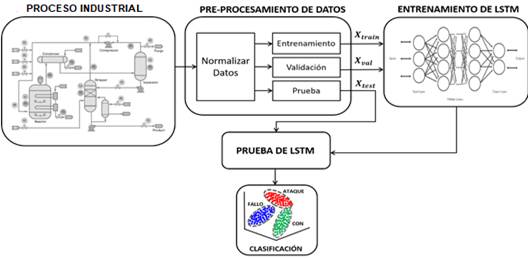
El proceso Tennessee Eastman (TE) se utiliza para evaluar el rendimiento del nuevo esquema de monitoreo [11]. La planta consta de cinco subprocesos interconectados entre sí (ver Figura 3). En el proceso se obtienen los productos, G y H, de los reactivos A, C, D y E. La planta se divide en cinco componentes tecnológicos: un reactor, un condensador, un separador vapor-líquido, un decapante de productos y un compresor.
Este proceso tiene 52 variables y un conjunto de observaciones correspondientes a la Condición de Operación Normal (CON) y 21 fallos. Cada conjunto de observación se genera a lo largo de 48 horas y los fallos se incorporan después de 8 horas de simulación, incorporando ruido en las mediciones con lo cual se puede probar la robustez del sistema propuesto a la presencia de ruido y perturbaciones (Obtenido de: http://web.mit.edu/braatzgroup/TE_proceso.zip). La Tabla 1 muestra los fallos utilizados para el análisis y evaluación del esquema propuesto. Para la etapa de entrenamiento (Training), se utilizaron 500 muestras de cada fallo y la CON, y se consideraron 960 muestras en la etapa de prueba (Testing).
Tabla 1 Fallos considerados en el proceso TE
| Fallo | Variables del proceso | Tipo |
|---|---|---|
| F1 | A/C relación de alimentación, B constante de composición | Paso |
| F6 | A pérdida de alimentación | Paso |
| F7 | C disponibilidad reducida de pérdida de presión del cabezal | Paso |
La Figura 4 muestra el comportamiento de algunas variables síntomas en presencia del fallo F6. Aunque la ocurrencia del fallo puede causar problemas en el funcionamiento del proceso, en ningún momento el sistema se apaga. A continuación, se analizará qué sucede cuando el proceso está bajo ciberataques. Los ataques simulados se muestran en la Tabla 2, donde el atacante tiene pleno conocimiento del proceso y es capaz de falsificar una medición del sensor en cualquier momento. En los experimentos realizados, se utilizó el Simulink/MATLAB. Al igual que en los fallos simulados, se consideraron 500 observaciones para cada ataque durante el entrenamiento y 960 para la etapa de prueba.
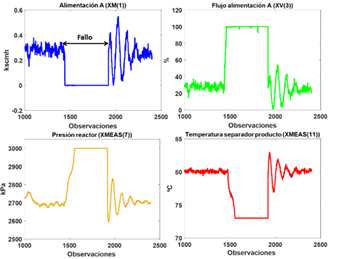
Tabla 2 Descripción de los ataques en el proceso TE
| Ataque | Sensor atacado [magnitud] | Variables síntomas | Descripción | Impacto |
|---|---|---|---|---|
| A1 | XM(1) [+2.35] | XM(1), XM(7), XM(8), XV(3) | Durante 3h, el valor real es aumentado en 2.35 | Alta presión en el reactor o bajo nivel de stripper. Apagado |
| A2 | XM(14) [+7] | XM(12), XM(14), XM(15), XV(7), XV(8) | Durante 2.88h, el valor real es aumentado en 7 | Alto nivel en el stripper. Apagado |
| A3 | XM(14) [-7] | XM(12), XM(14), XM(15), XV(7), XV(8) | Durante 2.02h, el valor real es disminuido en 7 | Bajo nivel en el separador. Apagado |
| XM(1): Alimentación A, XM(7): Presión reactor, XM(8): Nivel reactor, XM(12): Nivel separador, XM(14): Desbordamiento separador, XM(15): Nivel stripper, XV(3): Flujo alimentación A, XV(7): Flujo separador, XV(8): Flujo stripper | ||||
La Figura 5 muestra la ocurrencia del Ataque 2. Cuando se produce el ataque, la lectura en el sensor de desbordamiento del separador aumenta en 7. Esto hace que el controlador de flujo del separador cierre la válvula para contrarrestar el aumento del caudal. Como resultado del cierre de la válvula, el flujo disminuye (aunque el ataque todavía indica valores más altos), lo que hace que el nivel comience a subir.
El aumento de nivel provoca una apertura gradual de la válvula hasta que alcanza un valor estable. En el mismo intervalo de tiempo, el flujo del separador provoca un aumento en el nivel. Cuando finaliza el ataque, el sensor detecta una medición real más baja del desbordamiento del separador en comparación con el valor informado anteriormente. Como resultado, la válvula se abre y permite que, entre un gran flujo desde el separador hacia el stripper, lo que hace que el proceso entre en un modo inseguro y, por lo tanto, se apague el sistema. El objetivo principal es la detección y localización temprana del ataque para evitar el apagado del sistema. En este trabajo la arquitectura de la red LSTM fue configurada siguiendo los siguientes pasos:
Definir que la capa de entrada sea del mismo tamaño que el número de señales de entrada (52).
Definir 3 capas ocultas con 52, 40 y 25 unidades. Esta selección se basa en el experimento realizado en [8].
Finalmente, para la clasificación, se incluye una capa totalmente conectada del mismo tamaño que el número de clases de salida (7: CON, 3 fallos y 3 ataques).

Análisis y discusión de resultados
Es de gran importancia analizar la calidad y realización de un sistema de monitoreo de condición. Una herramienta ampliamente utilizada para este propósito es la matriz de confusión (MC), que permite el análisis del rendimiento de los algoritmos de clasificación. Los valores MC rs para r ≠ s en la MC muestran el número de observaciones del modo de operación r que el algoritmo clasifica erróneamente en los modos de operación. La Tabla 3 muestra la matriz de confusión, donde: CON: Condición de Operación Normal, F1: Fallo 1, F6: Fallo 6, F7: Fallo 7, A1: Ataque 1, A2: Ataque 2 y A3: Ataque 3. La diagonal de la MC corresponde a la cantidad de observaciones que fueron clasificadas con precisión. Conociendo el número total de observaciones en cada clase, puede calcular la precisión en la clasificación (TA = observaciones correctamente clasificadas/observaciones totales). La última fila muestra la precisión promedio de todas las clases.
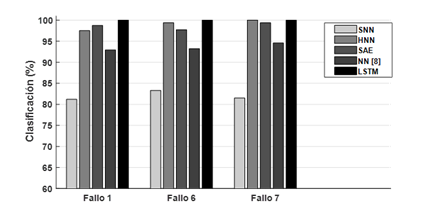
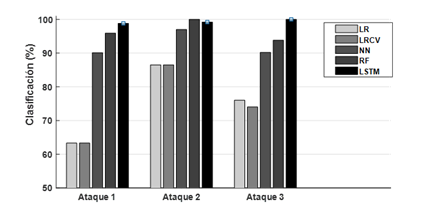
Como se observa en la Tabla 4, para el caso de los fallos, estos resultados fueron comparados con los obtenidos usando otras redes neuronales: Hierarchical Neural Network (HNN), Shallow Neural Network (SNN), Sparse Auto-Encoder (SAE) y los obtenidos en [8]. Por otra parte, en la Tabla 5 se muestra una comparación con técnicas utilizadas en [25] para la clasificación de los ataques analizados (LR: Logistic Regression, LRCV: Logistic Regression CV, NN: Neural Network, RF: Random Forest). Las Figura 6 y 7 muestran los resultados de clasificación (Fallos y Ataques) en el proceso TE, demostrando el alto desempeño del esquema de monitoreo propuesto.
Tabla 3 MC: LSTM (CON: 500, F1: 500, F6: 500, F7: 500, A1: 500, A2: 500, A3: 500)
| CON | F1 | F6 | F7 | A1 | A2 | A3 | TA (%) | |
| CON | 500 | 0 | 0 | 0 | 0 | 0 | 0 | 100 |
| F1 | 0 | 500 | 0 | 0 | 0 | 0 | 0 | 100 |
| F6 | 0 | 0 | 500 | 0 | 0 | 0 | 0 | 100 |
| F7 | 0 | 0 | 0 | 500 | 0 | 0 | 0 | 100 |
| A1 | 0 | 2 | 4 | 0 | 494 | 0 | 0 | 98.80 |
| A2 | 0 | 0 | 0 | 4 | 0 | 496 | 0 | 99.20 |
| A3 | 0 | 0 | 0 | 0 | 0 | 0 | 500 | 100 |
| AVE | 99.71 |
Tabla 4 Resultados de la comparación para los fallos (valores en negrita indican el mejor rendimiento)
| Fallo | SNN | HNN | SAE | NN [8] | LSTM |
| 1 | 81.19 | 97.51 | 98.75 | 99.31 | 100 |
| 6 | 83.31 | 99.38 | 97.70 | 100 | 100 |
| 7 | 81.49 | 100 | 99.37 | 99.86 | 100 |
| AVE | 81.99 | 98.96 | 98.60 | 99.72 | 100 |
Tabla 5 Resultados de la comparación para los ataques (valores en negrita indican el mejor rendimiento)
| Ataque | LR | LRCV | NN | RF | LSTM |
|---|---|---|---|---|---|
| 1 | 63.30 | 63.30 | 90.10 | 95.90 | 98.80 |
| 2 | 86.50 | 86.50 | 97.00 | 100 | 99.20 |
| 3 | 76.00 | 74.00 | 90.20 | 93.80 | 100 |
| AVE | 75.27 | 74.60 | 92.43 | 96.57 | 99.33 |
Conclusiones
Se ha presentado una estrategia robusta para el monitoreo en plantas industriales mediante el uso de algoritmos de aprendizaje profundo, que representa una de las contribuciones científicas del trabajo. El esquema propuesto constituye la principal contribución, el cual integra la detección y clasificación de fallos y ciberataques obteniendo excelentes resultados. El aprendizaje profundo se utiliza con el objetivo de procesar una gran cantidad de información presente en los conjuntos de datos de los sistemas de monitoreo de manera eficiente, teniendo en cuenta las incertidumbres e imprecisiones presentes en los datos para mejorar la clasificación ante la superposición entre las clases de fallos y ataques, mejorando de esta manera la robustez del sistema de monitoreo.
En la propuesta, el entrenamiento fuera de línea es una etapa muy importante. Se utiliza el algoritmo LSTM como herramienta de clasificación, para predecir el estado en el que se encuentra el proceso (CON, Fallo y Ataque). El enfoque propuesto fue validado utilizando el proceso de prueba TE, con resultados gratificantes. Finalmente, se hizo una comparación con varios tipos de algoritmos de clasificación. En todos los casos, la estrategia propuesta muestra el mejor rendimiento.

