










Meu SciELO
 Serviços customizados
Serviços customizadosServiços Personalizados
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares em
SciELO
Similares em
SciELO
Compartilhar

 Permalink
PermalinkMinería y Geología
versão On-line ISSN 1993-8012
Min. Geol. vol.33 no.1 Moa jan.-mar. 2017
ARTÍCULO ORIGINAL
Modelación de la resistencia al movimiento de la banda de un transportador en los tramos curvos del perfil y la traza
Modeling Conveyor´s Belt Resistance to Movement on Curve Sections of Profiles and Traces
Yoni Sierra González1, Roberto J. Sierra Pérez2, Arístides A. Legrá Lobaina2, María E. Torres Santander3
1 Ingeniero Mecánico. Empresa NOVACERO, Ecuador yonisierra85@gmail.com
2 Instituto Superior Minero Metalúrgico de Moa, Holguín, Cuba rsierra@ismm.edu.cu
3 Máster en Ciencias. Delegación Territorial CITMA Holguín, Holguín, Cuba epciencia@citmahlg.cu
Resumen
La resistencia al movimiento de la banda en los tramos curvos del perfil y la traza no se considera con precisión al diseñar transportadores de banda. En este trabajo se indujo un modelo teórico fundamentado matemáticamente para el cálculo de la resistencia al movimiento en los tramos curvos en el plano vertical, que disminuye la fricción y la componente de la fuerza normal a la banda en los puntos de contactos con los rodillos de apoyo que componen los tramos curvos. Se utilizaron métodos matemáticos precisos de interpolación adaptados para trazar curvas con una exigua energía potencial, sin puntos angulosos y obtener de forma determinística valores mínimos de resistencia al movimiento. Se obtiene un modelo para la determinación de las tensiones radiales y el ángulo de inclinación transversal de los apoyos de rodillos en los tramos curvos en el plano horizontal, en función de la productividad y de las propiedades de la mena laterítica mullida y homogeneizada que se transporta.
Palabras clave: transportador de banda; resistencia en tramos curvos; interpolación por tramos; spline cúbico.
Abstract
Belt resistance to movement on curved sections of profiles and traces is not taken into account to accurately design belt conveyors. A mathematically-based theoretical model is induced in this investigation to estimate the resistance to movement on curved sections in vertical plane, which reduces the friction and the normal strength component to the belt on contact locations with the support rollers on curved sections. Accurate mathematical methods of interpolation adopted to trace curves having a small potential energy without angled points and generate a minimum threshold of resistance to movement in a deterministic manner. A model is generated to determine radial stress and angle of cross inclination on the support rollers on the curved sections in the horizontal plane depending on the productivity and the properties of soft and homogenized laterite ores being conveyed.
Keywords: belt conveyors; resistance on curved sections; interpolation by section; cubic spline.
1. INTRODUCCIÓN
El consumo de energía de los transportadores de banda estacionarios (magistrales) se determina a partir de los valores de la resistencia al movimiento de la banda, tanto en la rama cargada como en la vacía; es decir, la resistencia al giro de los rodillos que soportan la banda, la resistencia a la rodadura de la banda sobre los rodillos y a la flexión de la banda. La resistencia que requiere la mayor cantidad de energía para superarla es la determinada por la diferencia de altura durante el traslado de la carga.
El ahorro de energía en los transportadores de banda en las minas lateríticas se garantiza mediante el control de varios parámetros tecnológicos y de la ingeniería de diseño del transportador (Antoniak 2003; Siva y Radha 1990; Küsel 2003; Nuttall y Lodewijks 2006; Lauhoff 2005, 2006; Sierra 2005, 2010), sin embargo, aún no se ha considerado durante el diseño, en función de la productividad y de las propiedades de la mena laterítica mullida y homogeneizada que se transporta, la mejora de la metodología de cálculo de la resistencia al movimiento de la banda, en los tramos curvos del perfil en el plano vertical, las tensiones radiales y el ángulo de inclinación transversal de los apoyos de rodillos, en los tramos curvos en el plano horizontal.
Las resistencias en los tramos rectos horizontales e inclinados se determinan por las fórmulas 1, 2 y 3 (Faddiev 1972; Tarasov 1980; Potapov 1980; Spivakoski 1982; Spivakoski y Dimitriev 1982; Spivakoski y Potapov 1983; Grigoriev 1986; Diakov 1997; Lamber 1990; Shasmeiter 1997 y Vasiliev, Nikolaiev y Cazonov 2006):
![]() (1)
(1)
![]() (2)
(2)
Si hay aceleración, surge la fuerza de inercia:
![]() (3)
(3)
Donde:
![]() y
y ![]() : fuerza de resistencia al movimiento en los tramos cargados y vacíos, respectivamente,
: fuerza de resistencia al movimiento en los tramos cargados y vacíos, respectivamente,
N, qb: peso lineal de la banda,
N/m, qc: peso lineal de la carga,
N/m,![]() : peso lineal de los rodillos de apoyo en la rama cargada,
: peso lineal de los rodillos de apoyo en la rama cargada,
N/m, ![]() : peso lineal de los rodillos de apoyo en la rama vacía,
: peso lineal de los rodillos de apoyo en la rama vacía,
N/m, ln, n-1 y ![]() : longitud y ángulo de inclinación del tramo que se analiza; m y grados, respectivamente,
: longitud y ángulo de inclinación del tramo que se analiza; m y grados, respectivamente,
![]() : coeficiente generalizado de resistencia al movimiento, se determina de forma experimental,
: coeficiente generalizado de resistencia al movimiento, se determina de forma experimental,
ab: aceleración de la banda; m/s2,
ki: coeficiente que toma en consideración la influencia de las masas en rotación ki>1. El signo (+) es cuando el movimiento es hacia arriba y el signo (-) cuando el movimiento es hacia abajo.
Las ecuaciones 1 y 2 no se pueden aplicar en los tramos curvos del perfil según el plano vertical. La resistencia al movimiento en los tramos curvos del perfil en el plano vertical se determina por la relación entre las tensiones de entrada y salida al tramo (Tarasov 1980; Spivakoski y Potapov 1983; Shubin y Pedre 1986; Zelienkii y Petrov 1986; Tíjonov 1987; Shasmeiter y Diitriev 1987; Oriol y Aguilar 1995; Pereda y Polanco 1999; CEMA 1999).
En el caso de los tramos convexos surgen tensiones radiales que incrementan la fuerza de fricción. Estas tensiones en el tramo curvo no tienen definida aún una expresión matemática para su determinación, por lo cual es propósito de este trabajo. La resistencia en las partes curvilíneas del transportador se calcula por:
![]() (4)
(4)
Donde:
![]() : tensión de salida del tramo curvo; N,
: tensión de salida del tramo curvo; N,
SE: tensión de entrada en el tramo; N,
![]() : coeficiente que tiene en cuenta la relación entre SE y SS, depende del ángulo del arco de curvatura del tramo y de
: coeficiente que tiene en cuenta la relación entre SE y SS, depende del ángulo del arco de curvatura del tramo y de ![]() en esta parte curva.
en esta parte curva.
Según los autores anteriores ![]() =1,02 a 1,10 y no hay un criterio para seleccionar el valor más preciso. Se ha determinado que la imprecisión se incrementa a medida que aumenta el número de tramos curvos del transportador (Sierra 2010).
=1,02 a 1,10 y no hay un criterio para seleccionar el valor más preciso. Se ha determinado que la imprecisión se incrementa a medida que aumenta el número de tramos curvos del transportador (Sierra 2010).
Algunos autores (Matiushev y Sumin 1979; Potapov 1980; Oriol y Aguilar 1995; Vasiliev, Nikolaiev y Cazonov 2006) no consideran la resistencia en los tramos con la convexidad hacia arriba (cóncavos) en el cálculo de tracción, o sea: ![]() . Es importante percatarse de que siempre va a existir desplazamiento de carga y fricción, que implican pérdidas de energía y por tanto:
. Es importante percatarse de que siempre va a existir desplazamiento de carga y fricción, que implican pérdidas de energía y por tanto: ![]() .
.
Según el sitio www.woehwa.com, los tramos curvos cóncavo y convexo se construyen bajo consideraciones geométricas aproximadas y definidas previamente. De acuerdo con otros autores (Oriol 1993; Oriol y Aguilar 1995; CEMA 1999) estos tramos se construyen según una catenaria. Zelienkii y Petrov (1986) consideran que la determinación de la resistencia en los tramos curvos se obtiene con mayor precisión en función de una de las tensiones, del ángulo (![]() ) y del radio (RV) del arco de curvatura del tramo del perfil correspondientemente. Sin embargo, este último parámetro no siempre se ofrece como dato y no es fácil de obtener, lo que implica la formación de un sistema de ecuaciones que tiene como incógnitas, además, las tensiones de entrada y salida al tramo. Es evidente que la determinación de la resistencia al movimiento y de las tensiones de la banda es inexacta y de cierta complejidad.
) y del radio (RV) del arco de curvatura del tramo del perfil correspondientemente. Sin embargo, este último parámetro no siempre se ofrece como dato y no es fácil de obtener, lo que implica la formación de un sistema de ecuaciones que tiene como incógnitas, además, las tensiones de entrada y salida al tramo. Es evidente que la determinación de la resistencia al movimiento y de las tensiones de la banda es inexacta y de cierta complejidad.
Suele determinarse la tensión mínima de trabajo considerando los pesos lineales de la carga y de la banda y de la distancia entre rodillos ![]() por la ecuación 5:
por la ecuación 5:
![]() (5)
(5)
Ello introduce las siguientes insuficiencias:
1. En el perfil del transportador no se puede conocer en qué punto de la rama cargada está situada la mínima tensión, sin haber obtenido el valor de todas las tensiones de esa rama.
2. La tensión en un punto es igual a la tensión en el punto anterior, más la resistencia entre los puntos y, a su vez, esta última puede ser muchas veces mayor, ya que depende de la longitud del tramo, del perfil de la traza y de las dimensiones de los rodillos de apoyo y tambores motores y de desvío o retorno.
3. En dependencia del ángulo de inclinación del tramo y el sentido del movimiento, los valores de tensión o resistencia pueden ser positivos o negativos.
![]() (6)
(6)
La tensión mínima de trabajo obtenida por la ecuación 6sería la correcta para probar la flecha de la banda en la rama cargada, en lugar de la ecuación 5.
Según Zelienkii y Petrov (1986),la tensión en los tramos curvos convexos con carga, sin considerar la presión hacia los elementos de apoyo, se determina por las ecuaciones 7 y 8. Si a estas ecuaciones se les aplica la Teoría de Euler (para considerar la presión sobre los elementos de apoyo) se obtiene:
![]() (7)
(7)
![]() (8)
(8)
Estas ecuaciones determinan la resistencia en los tramos curvos sin considerar las tensiones de entrada y salida al tramo. Véase que dependen del radio, de la diferencia de altura y del ángulo del arco ![]() del tramo y del coeficiente de fricción
del tramo y del coeficiente de fricción ![]() de las partes móviles; parámetros que no siempre son conocidos y que son difíciles de determinar cuando se proyecta un transportador que garantice la menor resistencia y suavidad del tramo.
de las partes móviles; parámetros que no siempre son conocidos y que son difíciles de determinar cuando se proyecta un transportador que garantice la menor resistencia y suavidad del tramo.
Como desenlace se observa que no existe una expresión teórica, fundamentada matemáticamente, para el cálculo de la resistencia al movimiento en los tramos curvos en el plano vertical, que minimice la fricción y la componente normal a la banda. Entonces, se deduce utilizar métodos matemáticos de interpolación precisos adaptados para trazar curvas con la mínima energía potencial sin puntos angulosos y obtener de forma determinística valores mínimos de resistencia al movimiento.
Además, se ha detectado cierto desconocimiento de los parámetros que determinan las tensiones radiales y el ángulo de inclinación transversal de los apoyos de rodillos en los tramos curvos en el plano horizontal, en función de la productividad y de las propiedades del mineral laterítico.
El objetivo del presente trabajo es perfeccionar el cálculo de la resistencia al movimiento en los tramos curvos del perfil,que contribuya a un nuevo enfoque del método de cálculo de los transportadores de banda para menas lateríticas, aplicando fórmulas de interpolación más eficientes en los algoritmos establecidos.
2. NUEVO ENFOQUE DEL CÁLCULO DE LA RESISTENCIA AL MOVIMIENTO EN LOS TRAMOS CURVOS DEL PERFIL
Los métodos de diseño ingenieril, generalmente, contemplan cálculos matemáticos que en la práctica son implementados con niveles de precisión adecuados y suficientes para que respondan a los intereses de los usuarios. Un factor que obstaculiza una buena precisión es el medio que se utilice para calcular (Shampine, Allen y Pruess 1997; Arzola 2000).
Cualquier método de cálculo de transportadores de banda debe garantizar un correcto diseño, así como su implementación y explotación. También debe crear las bases para aplicar métodos de optimización, que permitan establecer los mejores parámetros de diseño y explotación. En este sentido se contribuye perfeccionando el procedimiento del cálculo de la resistencia en los tramos curvos del perfil del transportador de banda.
Para alcanzar lo expresado anteriormente, en este trabajo se propone aplicar fórmulas de interpolación más eficientes en los algoritmos para determinar con precisión la resistencia al movimiento en los tramos curvos del perfil durante la proyección de los trasportadores de banda.
Como contribución al perfeccionamiento de un nuevo enfoque del método de cálculo de la resistencia al movimiento en los tramos curvos del perfil se asume que:
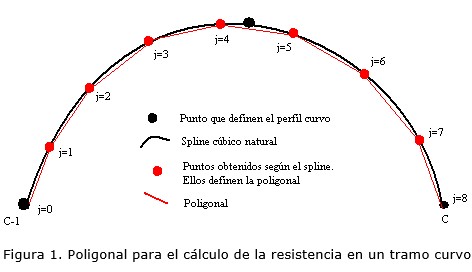
1. La determinación de la resistencia en los tramos de perfil curvo se basa en modelar el perfil mediante una curva spline, que permite obtener m puntos del tramo, sobre los cuales se define una poligonal. El cálculo de la resistencia en el tramo curvo se aproxima como la suma de las resistencias en cada tramo recto de la poligonal y en la medida en que aumente el valor de m, entonces mejora su precisión. Este enfoque puede ser aplicado a cualquier tramo curvo.
2. El tratamiento de cada tramo recto (incluyendo los que se determinan en las poligonales que modelan los tramos curvos) son tratados de forma individual en lo que respecta a sus datos, es decir, un tramo cargado no se calcula igual a uno vacío.
2.1. Perfeccionamiento del cálculo de la resistencia al movimiento en los tramos curvos para los transportadores de banda mediante el uso de splines
En los trabajos analizados en la introducción de este trabajo para determinar la resistencia al movimiento en los tramos curvos muchos autores establecen una relación práctica entre las tensiones de entrada SE y salida SS, a través de un coeficiente ![]() , cuyos valores oscilan desde 1,02 hasta 1,10 y estos valores se escogen por experiencia práctica. Hasta el momento no se ha obtenido una expresión teórica fundamentada matemáticamente y validada para la determinación de la resistencia en estos tramos, que considere las fuerzas que componen la normal que determinan con precisión la fuerza de fricción.
, cuyos valores oscilan desde 1,02 hasta 1,10 y estos valores se escogen por experiencia práctica. Hasta el momento no se ha obtenido una expresión teórica fundamentada matemáticamente y validada para la determinación de la resistencia en estos tramos, que considere las fuerzas que componen la normal que determinan con precisión la fuerza de fricción.
La construcción del tramo curvo se puede lograr sin puntos angulosos y con continuidad, utilizando el método de interpolación por tramos spline cúbico. El spline permite obtener un modelo para la proyección y diseño del tramo curvo y calcular valores mínimos de la resistencia al movimiento.
La metodología escogida para la realización de los cálculos está en consonancia con la referida por algunos investigadores (Álvarez et al. 2002; Mena 2006 y Young et al. 2008). Una función spline es una función polinomial por tramos, que es continua y posee derivadas continuas hasta un cierto orden. Además, debe satisfacer algunas de las siguientes condiciones: pasar por un conjunto de puntos de la gráfica de f(x) (spline interpolador), aproximarse a un conjunto de puntos experimentales (spline de mejor ajuste) y cumplir ciertos requerimientos estéticos.
2.1.1. El spline cúbico de interpolación
Considérese que para cada uno de los n+1 nodos ordenados en forma creciente {x0, x1, ..., xn}, que representen la longitud de cada tramo (xi) del perfil del transportador, se conoce el valor de una función f(x).
![]() (9)
(9)
Se necesita que el spline satisfaga las condiciones de interpolación:
![]() (10)
(10)
La expresión analítica del spline cúbico es:
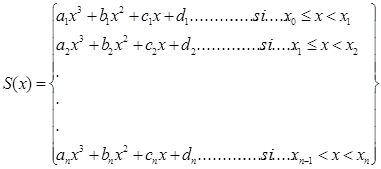 (11)
(11)
Como cada uno de los n polinomios de tercer grado que conforman el spline posee cuatro coeficientes, el spline posee 4n coeficientes que deben ser determinados a partir de ciertas condiciones. Para encontrar las fórmulas que determinan a S(x) se seguirá el procedimiento de ir imponiendo sucesivamente las condiciones de interpolación, continuidad y suavidad.
Usando un lenguaje geométrico, la gráfica de S(x) está formada por n secciones de polinomios cúbicos, de tal manera que la curva es continua y tanto la curvatura como la pendiente varían en forma continua (no hay puntos angulosos).
Cuando la función S(x) se utiliza como interpoladora debe, además, cumplir la condición de tomar en los nodos de interpolación idénticos valores que los que toma la función y = f(x). Aquí se está suponiendo que los nodos de interpolación coinciden con los puntos que limitan los tramos del spline. Las condiciones que debe satisfacer el spline son las siguientes:
![]() (12)
(12)
![]() (13)
(13)
![]() (14)
(14)
![]() (15)
(15)
Estas condiciones suman en total 4n–2, que significa que aún se cuenta con la posibilidad de imponer otras dos condiciones al spline. Cuando se cumple la condición 14se logra que los puntos de inflexión no sean angulosos y la condición 15 que la curvatura de la función no sea angulosa (suave). Para encontrar las fórmulas que determinan a S(x) se seguirá el procedimiento de ir imponiendo sucesivamente las condiciones de interpolación, continuidad y suavidad, aunque no en ese orden. Como S(x) debe cumplir 4n-2 ecuaciones y existen 4n coeficientes a determinar, es posible imponer otras dos condiciones. Existen varios criterios en cuanto a estas dos condiciones, pero lo más frecuente es hacer: S''(x0) = S''(xn) = 0
Cuando se toman estas condiciones el spline se llama natural. Se ha demostrado que el spline natural es la función definida por tramos cúbicos que pasa por los n+1 puntos (x0, y0), (x1, y1),…(xn, yn) y hace mínima la integral (Álvarez et al. 2002):
 (16)
(16)
El procedimiento práctico para encontrar los valores de a1,…an, b1,…bn, c1,…cn, d1,…dn fue tomado de Álvarez y demás investigadores (2002). Dado que S''(x) está relacionada con la curvatura de la gráfica de S(x), entonces, la propiedad 16 significa que para S(x) se tiene la curvatura global mínima con respecto a cualquier otra función interpoladora.
Desde un punto de vista físico, como la energía potencial de una varilla delgada, flexible y elástica depende de la curvatura en cada punto (Álvarez et al. 2002), resulta que si una varilla con tales propiedades es obligada a pasar por los n + 1 puntos del plano: (x0, y0), (x1, y1), ..., (xn, yn), ella toma la forma que minimiza su energía potencial elástica, que es precisamente la del spline cúbico natural que interpola a dichos puntos. Esto lo confirman la página Spline Interpolation de la Enciclopedia Wikipedia (consultada en diciembre de 2008) y García (2005). Donde se expresa que f(x)=S(x) minimiza el funcional  , que es una aproximación de curvatura
, que es una aproximación de curvatura
 (17)
(17)
lo cual significa que S(x) pasa por todos los puntos (xi, yi).
La resistencia en un tramo recto se calcula por las fórmulas 1 y 2, donde: ![]() : ángulo que forma el tramo con respecto a la horizontal. Usualmente, el cálculo de la resistencia en un tramo de perfil curvo se realiza asumiendo que se conocen las tensiones de entrada SE y de salida SS en el tramo y SS mayor del 1 al 10 % de SE y entonces,
: ángulo que forma el tramo con respecto a la horizontal. Usualmente, el cálculo de la resistencia en un tramo de perfil curvo se realiza asumiendo que se conocen las tensiones de entrada SE y de salida SS en el tramo y SS mayor del 1 al 10 % de SE y entonces, ![]() .
.
Si se suponen conocidos los puntos de la trayectoria del perfil de un tramo (dados por las coordenadas de este perfil), entonces, es posible encontrar el spline cúbico natural que interpola estos puntos; mediante esta función spline es posible hallar las coordenadas de tantos puntos j como se necesiten para definir una poligonal formada por segmentos rectos definidos entre cada dos puntos consecutivos, de manera que la poligonal constituye una aproximación de la curva spline y, por tanto, de la trayectoria del transportador. La resistencia en el tramo curvo será calculada como la suma de las resistencias en cada tramo recto de la poligonal, como se muestra en la Figura 1.
3. RESULTADOS
3.1. Resistencia al movimiento de los transportadores de banda en los tramos curvos verticales
En el enfoque clásico, el cálculo de la fuerza de tensión en cualquier tramo se realiza mediante la expresión 6. Sin embargo, en un tramo curvo cóncavo o convexo cada segmento de tramos i, i+1 (i=1 hasta n) tiene diferente pendiente (![]() ). Se induce una expresión general para determinar la tensión en cada uno de los puntos (i) que definen el segmento, considerando las variaciones de los valores de resistencia provocados por los cambios de pendiente de cada segmento de la poligonal formada a través de los coeficientes denominados
). Se induce una expresión general para determinar la tensión en cada uno de los puntos (i) que definen el segmento, considerando las variaciones de los valores de resistencia provocados por los cambios de pendiente de cada segmento de la poligonal formada a través de los coeficientes denominados ![]() y
y ![]() , que afectan el modelo 6 de la siguiente forma:
, que afectan el modelo 6 de la siguiente forma:
![]() ; (18)
; (18)
Del modelo 18 se deducen tres casos particulares:
1. ![]() y
y ![]() cuando no existe cambio de pendiente entre dos segmentos consecutivos (
cuando no existe cambio de pendiente entre dos segmentos consecutivos (![]() ). Este es el caso clásico.
). Este es el caso clásico.
2. ![]() y
y ![]() , cuando hay cambio de pendiente del tramo (i-1,i) al tramo (i, i+1) en forma cóncava (
, cuando hay cambio de pendiente del tramo (i-1,i) al tramo (i, i+1) en forma cóncava (![]() ), como se muestra en la Figura 2.
), como se muestra en la Figura 2.
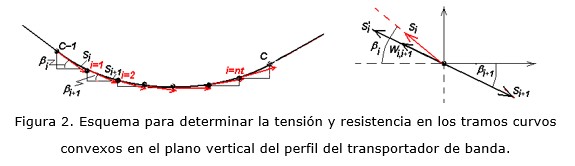
3. Cuando el cambio de la pendiente del tramo es de forma convexa (![]() , Figura 2) hay una proyección sobre la batería de los apoyos de rodillos originada por la presión de la fuerza normal SN(i) que ejerce la banda sobre los mismos e incrementa la fuerza de resistencia al movimiento (aumento de la fuerza de fricción) (Figura 3).
, Figura 2) hay una proyección sobre la batería de los apoyos de rodillos originada por la presión de la fuerza normal SN(i) que ejerce la banda sobre los mismos e incrementa la fuerza de resistencia al movimiento (aumento de la fuerza de fricción) (Figura 3).
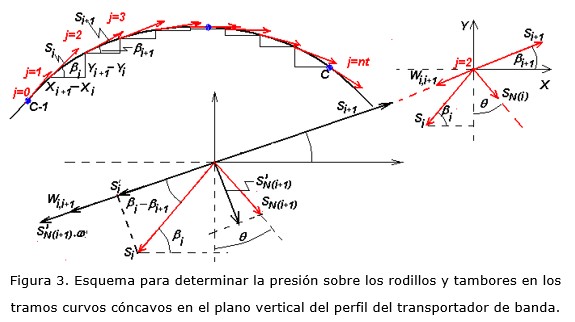
Según la Figura 3:
![]() (19)
(19)
Donde: ![]() (20)
(20)
es la fuerza normal a los rodillos producida por el cambio de pendiente del tramo convexo; ![]() : componente normal correspondiente Si+1:
: componente normal correspondiente Si+1:
![]() ; (21)
; (21)
![]() : proyección axial de Si según la dirección de la fuerza de tensión Si+1,
: proyección axial de Si según la dirección de la fuerza de tensión Si+1,
![]() (22)
(22)
Entonces, los coeficientes ![]() y
y ![]() quedan:
quedan:
 ; (23)
; (23)
Y,
 ; (24)
; (24)
Donde: ![]() y
y ![]() : ángulo de inclinación de los segmentos rectos (i-1,i) y (i, i+1), respectivamente, de la poligonal formada por el spline natural,
: ángulo de inclinación de los segmentos rectos (i-1,i) y (i, i+1), respectivamente, de la poligonal formada por el spline natural,
 ; (25)
; (25)
y,
![]() ; (26)
; (26)
La fuerza SN(i) incrementa la fuerza de resistencia nociva en un valor ![]() . Los coeficientes
. Los coeficientes ![]() y
y ![]() significan en cuantas veces se incrementa la resistencia al movimiento en los tramos curvos provocada por la presión de la banda sobre los rodillos. Esto se cumple tanto para la rama cargada como para la vacía.
significan en cuantas veces se incrementa la resistencia al movimiento en los tramos curvos provocada por la presión de la banda sobre los rodillos. Esto se cumple tanto para la rama cargada como para la vacía.
El cálculo de S(C) (Figura 3) se hace complejo debido a que ![]() es variable. Si S(C) es la tensión en el punto final de un tramo curvo, entonces, aplicando el método de contorno por puntos (Figura 1), se tiene que:
es variable. Si S(C) es la tensión en el punto final de un tramo curvo, entonces, aplicando el método de contorno por puntos (Figura 1), se tiene que:
![]()
![]() (27)
(27)
…
![]() (28)
(28)
Donde: nt: número de segmentos que ajustan el tramo curvo que une a C-1 y C, S(C-1): tensión en el punto que inicia el tramo curvo (punto final del tramo anterior al tramo curvo analizado). En la medida en que la distancia entre cada pareja de puntos sea pequeña, el resultado del cálculo de S(i) en cada punto será más preciso debido a que tiene en cuenta las variaciones del ángulo de inclinación de cada tramo.
Ahora se deben calcular los valores de ![]() y
y ![]() para cada tipo de tramo y en este caso se asume que
para cada tipo de tramo y en este caso se asume que ![]() , donde y=f(x) es la función que modela al tramo curvo.
, donde y=f(x) es la función que modela al tramo curvo.
Como se desconoce la expresión de f(x), entonces ella puede ser aproximada por el spline cúbico natural S(x), tal como se definió en (9) y (10) y, por tanto, S'(x) puede aproximar a ![]() .
.
3.2. Determinación de la tensión en el tramo curvo horizontal
Cuando el transportador de banda se mueve por una trayectoria curva en el plano horizontal, con velocidad del movimiento de la banda constante, el equilibrio dinámico se obtiene añadiendo a las fuerzas aplicadas el vector de inercia ![]() , con el cual el sistema resultante es nulo. El vector de inercia se puede expresar en sus componentes tangencial y normal, pero en este caso solamente hay que considerar su componente normal por ser constante el módulo de la velocidad de la banda. El valor de esta fuerza normal resultante ha sido determinado por otros investigadores (Grabner 1990; Grimmer y Grabner 1993; Grabner et al. 1993). El valor de la fuerza normal individual de los rodillos también influye en la curvatura de la banda (Kessler y Grabner 1996; Grabner1990; Grimmer y Kessler 1987a, 1987b).
, con el cual el sistema resultante es nulo. El vector de inercia se puede expresar en sus componentes tangencial y normal, pero en este caso solamente hay que considerar su componente normal por ser constante el módulo de la velocidad de la banda. El valor de esta fuerza normal resultante ha sido determinado por otros investigadores (Grabner 1990; Grimmer y Grabner 1993; Grabner et al. 1993). El valor de la fuerza normal individual de los rodillos también influye en la curvatura de la banda (Kessler y Grabner 1996; Grabner1990; Grimmer y Kessler 1987a, 1987b).
En esta investigación, a partir de la Figura 4, se obtiene el modelo para la determinación del incremento de la tensión de la banda en la curva según el plano horizontal:

 (29)
(29)
Donde:
fr: coeficiente de fricción entre la banda y los apoyos de rodillos durante el desplazamiento lateral de la banda,
Sc: tensión que se incrementa en la curva horizontal producto de la presión de la banda contra los rodillos de apoyo (Figura 4); N,
RH: radio de la traza en la curva según el plano horizontal; m,
λ: ángulo de inclinación de la artesa con respecto a la horizontal según la sección transversal de la banda en los tramos curvos de la traza; grados.
El ángulo ![]() está limitado por el ángulo maximal del talud del mineral laterítico
está limitado por el ángulo maximal del talud del mineral laterítico ![]() , es decir, en la curva el ángulo maximal del talud del mineral depositado sobre la banda se incrementa en el valor de
, es decir, en la curva el ángulo maximal del talud del mineral depositado sobre la banda se incrementa en el valor de ![]() ; o sea:
; o sea: ![]() . Este fenómeno provoca una disminución del área de la sección transversal del mineral sobre la banda y de la productividad del transportador para un mismo ancho de banda. El área de la sección transversal también ha sido determinada por Kessler (1989) y CEMA (1999), pero ellos no han considerado la disminución de la productividad ni la interrelación entre el ángulo del talud, la humedad y la composición granulométrica de los minerales lateríticos.
. Este fenómeno provoca una disminución del área de la sección transversal del mineral sobre la banda y de la productividad del transportador para un mismo ancho de banda. El área de la sección transversal también ha sido determinada por Kessler (1989) y CEMA (1999), pero ellos no han considerado la disminución de la productividad ni la interrelación entre el ángulo del talud, la humedad y la composición granulométrica de los minerales lateríticos.
El incremento de la fuerza de resistencia en el rodillo lateral interior de la curva se considera en los cálculos (Lieberwirth 1994; Sagheer 1989; Kessler et al. 1994 y Staples 2001, 2002). El cálculo de la fuerza de resistencia, en relación al tramo curvo en los dispositivos guías de la banda, ha sido determinado con anterioridad (Grimmer y Beumer 1972; Grimmer y Kessler 1987a, 1987b, 1991, 1992; Kessler y Grabner 1996) y constituye el 0,015 %. En la selección del radio de la curva hay que considerar la disminución de la productividad, los gastos energéticos y económicos.
4. DISCUSIÓN
La optimización del perfil de cada tramo se basa, según lo planteado en este trabajo, mediante las ecuaciones 16 y 17:
El spline f(x)=S(x) minimiza el funcional en el espacio de Sobolev H2([a; b]) donde: J(f) es una aproximación de la curvatura K=
en el espacio de Sobolev H2([a; b]) donde: J(f) es una aproximación de la curvatura K= .
.
Esto tiene un valor práctico importante ya que si se mantienen las premisas de que la curva que pasa por los n puntos que definen al spline, sea continua y además, sean continuas sus dos primeras derivadas cuando aumenta la curvatura, entonces se producen dos fenómenos:
a. La longitud de S(x) será mayor. Esto es esencial ya que según plantean las ecuaciones 1 y 2 el valor de la resistencia (W) depende directamente de la longitud (l) de cada tramo.
b. Puesto que el cálculo de la tensión, de acuerdo con lo expuesto en la fórmula 18, depende del valor de ![]() que para los tres casos explicados (Figuras 1, 2 y 3) dependen de los ángulos
que para los tres casos explicados (Figuras 1, 2 y 3) dependen de los ángulos ![]() y
y ![]() que forman los segmentos con respecto a la horizontal. Para el caso de cambio cóncavo, a medida que aumenta la diferencia entre los ángulos (propio de un arco con gran curvatura), el valor de
que forman los segmentos con respecto a la horizontal. Para el caso de cambio cóncavo, a medida que aumenta la diferencia entre los ángulos (propio de un arco con gran curvatura), el valor de ![]() aumenta y por tanto el de
aumenta y por tanto el de ![]() . Para el caso de cambio convexo los valores de
. Para el caso de cambio convexo los valores de ![]() y de
y de ![]() disminuyen cuando aumentan los valores de los ángulos, aunque no de la misma forma. El valor de
disminuyen cuando aumentan los valores de los ángulos, aunque no de la misma forma. El valor de ![]() es prácticamente igual a uno siempre que ambos valores de los ángulos sean no mayores de 60o; cuando ambos valores se acercan al mismo tiempo a 90o, entonces este coeficiente decrece bruscamente, haciendo que
es prácticamente igual a uno siempre que ambos valores de los ángulos sean no mayores de 60o; cuando ambos valores se acercan al mismo tiempo a 90o, entonces este coeficiente decrece bruscamente, haciendo que ![]() crezca muy rápido. Por otra parte, el valor de
crezca muy rápido. Por otra parte, el valor de ![]() tiene un comportamiento semejante, pero su decrecimiento se acelera cerca de los 45o. En general, puede afirmarse que si los dos ángulos son pequeños, entonces ambos coeficientes son prácticamente iguales a uno, lo cual quiere decir que para una curva S(x) de poca curvatura el valor de la tensión S, al final del tramo, dependerá casi linealmente del valor de S en el tramo anterior y del valor de la resistencia (W) en el tramo que se analiza.
tiene un comportamiento semejante, pero su decrecimiento se acelera cerca de los 45o. En general, puede afirmarse que si los dos ángulos son pequeños, entonces ambos coeficientes son prácticamente iguales a uno, lo cual quiere decir que para una curva S(x) de poca curvatura el valor de la tensión S, al final del tramo, dependerá casi linealmente del valor de S en el tramo anterior y del valor de la resistencia (W) en el tramo que se analiza.
Entonces, es posible definir un transportador con valor mínimo de rozamiento y un valor mínimo de tensión, si su perfil está dado por un spline cúbico natural que tiene curvatura global mínima.
La optimización consiste en obtener el spline cúbico natural que pasa por los puntos que definieron los tramos del transportador y luego evaluar este modelo geométrico para puntos intermedios sobre los cuales se colocarán las baterías de rodillos de la artesa. Si se conoce la longitud del transportador, el número de baterías de rodillos define la distancia entre ellos.
La optimización, en este caso, se basa en determinar cuántas baterías de rodillos deben colocarse y la cota de cada una de ellas, para minimizar la resistencia total del transportador y su tensión. Nótese que al aumentar la cantidad de rodillos mejora el diseño de la curvatura óptima, pero aumenta el peso de los rodillos por unidad de longitud, entonces debe buscarse una variante entre estos dos factores.
5. CONCLUSIONES
- Se establece el perfeccionamiento del cálculo de la resistencia al movimiento en los tramos curvos del perfil y del cálculo de la tensión que se origina en los tramos curvos cóncavos hacia abajo para los transportadores de banda mediante los splines cúbicos naturales, por medio de la inducción del modelo 18.
- Se obtienen los modelos 23 y 24 de los coeficientes que afectan el valor de la resistencia, determinada en los tramos curvos del perfil del transportador de banda a través del modelo 18.
- Se establece la modelación del cálculo preciso de la resistencia al movimiento en los tramos curvos del perfil de los transportadores de banda para menas lateríticas, mullidas y homogeneizadas (modelos 27 y 28), mediante el empleo de los spline cúbicos.
- Se obtiene el modelo para la determinación del incremento de la tensión de la banda en la curva del perfil en el plano horizontal, según la sección transversal de la artesa de la banda sobre los rodillos en estos tramos (modelo 29).
6. REFERENCIAS
Álvarez, B. M.; Gómez, M. A.; Guerra, H. A. y Lau, F. R. 2002: Matemática Numérica. Félix Varela, La Habana.
Antoniak, J. 2003: Theoretical basis and industrial applications of energy–saving and increased durability belt conveyors. Acta Montanistica Slovaca 8(2): 106-117.
Arzola, J. 2000: Sistemas de ingeniería. Félix Varela, La Habana, 482 p.
Conveyor Equipment Manufacturers Association (CEMA). 1999: Belt conveyors for bulk materials. Sixth Edition. United States, 770 p.
Diakov, V. A. 1997: Máquinas de transporte en la minería a cielo abierto. Niedra, Moscú .
Faddiev, B. 1972: Transportadores de banda en las canteras de minerales metálicos. Niedra, Moscú, 387 p.
García, F. 2005: Métodos de elementos finitos mixtos para elasticidad incompresible no lineal. Tesis doctoral. Universidad de Concepción. Chile.
Grabner, K. 1990: Untersuchungen zum normalkraftverlauf zwischen gurt und tragrollen bei gurtfrderern. Dissertation. Montanuniversitt Leoben.Disponible en: www.saimh.co.za/beltcon/beltcon8/paper813.htm
Grabner, K.; Grimmer, K. J. y Kessler, F.1993: Investigation into normal forces between belt and idlers at critical locations on the belt-conveyor track. Bulk Solids Handling 13(4): 727-734.
Grigoriev, B. N. 1986: Máquinas y complejos de transporte para el laboreo subterráneo. Niedra, Moscú, 415 p.
Grimmer, K. J. y Beumer, B. 1972: Auslegung und betrieb kurvengngiger frderbnder mit normalen frdergurten. Frdern und Heben 22(3): 107-112.
Grimmer, K. J. y Grabner, K. 1993: Untersuchungen ber die normalkrfte zwischen gurt und tragrollen an kritischen stellen des gurtverlaufes bei bandfrderanlagen. Berg-und Httenmnnische Monatshefte 138(6): 212-220.
Grimmer, K. J. y Kessler, F. 1987a: Spezielle betrachtungen zur gurtfhrung bei gurtfrderern mit horizontaikurven. Teil I: anmerkungen zum herkmmlichen berechnungsverfahren. Berg-und Httenmnnische Monatshefte 132(2): 27-32.
Grimmer, K. J. y Kessler, F. 1987b: Spezielle betrachtungen zur gurtfhrung bei gurtfrderern mit horizontaikurven. Teil II: verbesserung des herkmmlichen berechnungsverfahrens. Berg-und Httenmnnische Monatshefte132(6): 206-211.
Grimmer, K. J. y Kessler, F. 1991: Zur auslegung von gurtfrderern mit horizontalkurven. Frdern und Heben, Vereinigte Fachverlage Krausskopf 41(5): 428-432.
Grimmer, K. J. y Kessler, F. 1992: The design of belt conveyors with horizontal curves. Bulk Solids Handling 12(4): 557-563.
Kessler, F. y Grabner, K.1996: Bico-TEC -Horizontal conveyor belts
traveling in a curved direction. Austria.
Kessler, F. 1989: Untersuchungen des schttgutverhaltens bei seitlicher auswanderung des gurtes in der tragrollenmulde einer gurtfrderanlage. Berg-und Httenmnnische Monatshefte 134(2): 35-40.
Kessler, F.; Grabner, K. y Grimmer, K. J.1994: Neuer kurvengngiger gurtfrderer mit pendelnder aufhngung. Frdern und Heben 44(1-2): 77-80.
Küsel, B. 2003: The strongest conveyor belts from 1970 to 2000. Bulk India. PHOENIX Conveyor Belt Systems Hamburg, Germany. Disponible en: www.phoenix-ag.com.
Lamber, J. 1990: Alternative weighing. Tecnology for belt. Conveying systems. Bulk Solids Handling 1(3).
Lauhoff, H. 2005: Control de velocidad en correas transportadoras - ¿Realmente ahorra energía? Bulk Solids Handling 25(6). Disponible en: www.synergy-eng.com/spanish/pdf/.
Lauhoff, H. 2006: Geschwindigkeitsregelung bei Gurtförderern: spart das wirklich Energie? ZKG international 58(12): 47-61.
Lieberwirth, H. 1994: Design of belt conveyors with horizontal curves. Bulk Solids Handling 14(2): 283-286.
Matiushev, L. G. y Sumin, V. M. 1979: Dispositivos de las fábricas de enriquecimiento. Niedra, Moscú .
Mena, S. T. 2006: Aplicación de métodos matemáticos para el perfeccionamiento de la metodología de cálculo de los transportadores de banda. Trabajo de diploma. Instituto Superior Minero Metalúrgico.
Nuttall, A. J. y Lodewijks, G.2006: Traction versus slip in a wheel-driven belt conveyor. Mechanism and Machine Theory 41(11): 1336-1345.
Oriol, G. J. M. y Aguilar, P. F. 1995: Máquinas de transporte continuo. T I. 3 ed. Pueblo y Educación, La Habana, 235 p.
Oriol, G. J. M. 1993: Conferencia de máquinas transportadoras. Félix Varela, La Habana.
Pereda, H. S. y Polanco, A. R G. 1999: Transporte minero.Félix Varela, La Habana, 363 p.
Potapov, N. G. 1980: Máquinas de transporte. Niedra, Moscú, 261 p.
Sagheer, M. 1989: Turkey operates its first overland conveyor with horizontal curves. Mining Engineering 40(4): 234-235.
Shampine, L. F.; Allen Jr., R. C. y Pruess, S.1997: Fundamentals of numerical computing. Vol. 1. Wiley, New York.
Shasmeiter, L. G. y Diitriev, V. G. 1987: Teoría y cálculo de los transportadores de banda. Mashinostoinie, Moscú, 417 p.
Shubin, V. S. y Pedre, C. 1986: Diseño de máquinas industriales. T. III. Pueblo y Educación, La Habana, 364 p.
Sierra, R. J. 2005: Perfeccionamiento de la metodología de cálculo de los transportadores de banda. Tesis de maestría. Instituto Superior Minero Metalúrgico. 100 p.
Sierra, R. J. 2010: Optimización energética en el diseño de transportadores de banda para el mineral laterítico cubano. Tesis doctoral. Instituto Superior Minero Metalúrgico. 100 p.
Siva, N. y Radha, S. 1990: A finite element analysis for the design of a conveyor pulley shell. Computers y Structures 35(3): 267-277.
Spivakoski, A. O. y Dimitriev, B. G. 1982: Teoría de los transportadores de banda. Nauta, Moscú, 363 p.
Spivakoski, A. O. y Potapov, M. G. 1983: Máquinas y complejos de transporte en las labores minera. Niedra, Moscú, 383 p.
Spivakoski, A. O. 1982: Transportadores de banda para la industria minera. Niedra, Moscú, 345 p.
Tarasov, U. D. 1980: Construcción y cálculo de las máquinas y complejos de transporte. Naúka, Leningrado, 227 p.
Tíjonov, N. V. 1987: Máquinas de transporte en las empresas mineras. Niedra, Moscú, 367 p.
Vasiliev, K. A.; Nikolaiev, A. K. y Cazonov, K. G. 2006: Máquinas de cargas y transporte de las plantas de beneficio de minerales. Naúka, Sant Petersburgo, 358 p.
Young, Y. W.; Cao, W.; Chung, T. y Morris, J.2008: Applied numerical methods using MATLAB. T. 1 y 2. Félix Varela, La Habana.
Zelienkii, O. B. y Petrov, A. C. 1986: Manual para proyectos de transportadores de banda. Niedra, Moscú, 222 p.
Recibido: 04/11/2014
Aceptado: 28/05/2016
Yoni Sierra González, Ingeniero Mecánico. Empresa NOVACERO, Ecuador yonisierra85@gmail.com

