










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. -INTRODUCCIÓN
La revolución que está sufriendo el mundo en el campo tecnológico es producto en gran medida del avance de la física. Esto se ve de manera particular en el desarrollo de la microelectrónica y de otras áreas de alta tecnología que utilizan los principios del electromagnetismo en el diseño de aparatos y sistemas de información, medición, etc. Las aplicaciones que se realizan en la actualidad son variadas y la ciencia del magnetismo se ha vuelto central en nuestra tecnología por lo que el cumplimiento de normas nacionales e internacionales, así como el aseguramiento de un sistema de calidad confiable, ha inducido a diversas industrias a incursionar en el campo de la metrología, para cumplir con estándares que les permitan ser competitivas y poder exportar sus productos. Tal es el caso, por ejemplo, de industrias del sector automotriz, metal-mecánico, agroalimentario y minero, las cuales basan el desarrollo de algunos de sus productos en la medición de propiedades magnéticas de materiales [1-5].
La caracterización magnética consiste en la medición de la inducción magnética y su mapeo dentro de la región de trabajo con una resolución espacial especificada [6]. El Centro Nacional de Electromagnetismo Aplicado (CNEA), ubicado en Santiago de Cuba, Cuba, es una entidad de Ciencia e Innovación Tecnológica de la Universidad de Oriente que investiga y aplica tecnologías basadas en el electromagnetismo tanto en la industria, la medicina, la agricultura y el medio ambiente logrando impactos sociales de referencia nacional e internacional. En este centro se encuentra el Laboratorio de Caracterizaciones Magnéticas (LCM), el cual tiene entre sus funciones la caracterización magnética de imanes permanentes y dispositivos generadores de campos magnéticos, tales como acondicionadores magnéticos, separadores de partículas ferromagnéticas y aplicadores para la estimulación magnética de sistemas biológicos e ingenieros [7]. Cada una de las aplicaciones mencionadas demandará un nivel de inducción magnética determinado por el investigador, para un mejor desempeño del instrumento a utilizar. Sin embargo, en la actualidad estas mediciones se realizan manualmente en el LCM del CNEA, tanto para el control de la posición de la sonda, como para el registro de la lectura del gaussímetro. Para ello se ubica una cuadrícula equidistante a 1cm o 5mm, y se recorre la superficie del equipo a caracterizar posicionando la sonda sobre cada uno de los puntos, una persona realiza las mediciones y otra anota las mismas de forma manual. Este trabajo tiene como objetivo realizar la propuesta e implementación del proceso automatizado de caracterizaciones magnéticas en este centro lo cual constituye la principal contribución desde el punto de vista de innovación tecnológica que se hace en el mismo. La propuesta que se hace consiste en el desarrollo de una instalación automatizada para realizar mediciones de inducción magnética y procesamiento de datos con la que se logra fiabilidad y eficiencia en la toma, el almacenamiento y el procesamiento de las mediciones.
2.- MATERIALES Y MÉTODOS
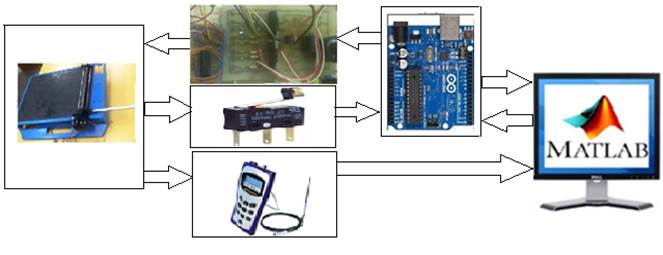
La propuesta de automatización que se hace en este artículo se presenta en la Fig. 1 y consiste en:
Uso del Sensor de efecto Hall FW. Bell. [8]
Incorporar una estructura cartesiana de 2 GDL como portadora del sensor de efecto Hall FW. Bell.
Desarrollar una placa electrónica para el control de los motores paso a paso que tiene el robot planar.
Utilizar una plataforma de desarrollo Arduino Uno como unidad procesadora
Desarrollar un programa en Matlab® para el procesamiento de los datos medidos por el sensor y que garantice mediante una interfaz gráfica de usuario la entrada de datos como las características del acondicionador y la cantidad de mediciones deseadas a realizar en un intervalo de longitud [2, 3, 5].
2.1 SENSOR DE EFECTO HALL
El gaussímetro FW Bell modelo 5180 se muestra en la Fig. 2. El mismo es un instrumento portátil con conexión por puerto USB que tiene tres rangos de medición con la sonda estándar (la que dispone actualmente el LCM):

2.2.- ROBOT PLANAR DE 2 GRADOS DE LIBERTAD
El robot planar de 2 GDL escogido tiene una dimensión es de 50x55cm, el mismo contiene las poleas, motores de paso, la tarjeta electrónica para el control de los motores, sensores y engranajes ideales para este proyecto. Fue necesario aislar el robot planar de 2 GDL con un brazo de acrílico, portador de la sonda de efecto Hall, debido a que los actuadores del mismo son motores paso a paso (cuyas características se muestran en la Tabla 1), los cuales por su propia construcción influyen en la variable medida, pues contienen materiales ferromagnéticos, lo que afectaría la medición provocando interferencias importantes en el proceso, además de la posibilidad de ser atraídos por el imán a caracterizar. Este robot planar se muestra en la Fig. 3 [9].
Tabla 1 Características de los motores
| Motor Unipolar | Voltaje alimentación | Ángulos de Paso | País de fabricación |
|---|---|---|---|
| Kp6r2-024 | 10.4 V de DC | 1.8 | Japón |
| Kp4m-219 | 10.4 V de DC | 1.8 | Japón |

Para establecer la velocidad de giro del motor y que este se desplazara el ángulo indicado, fue necesario realizar una serie de cálculos, de los cuales se derivan las ecuaciones generales que se introdujeron en el firmware, para que, enviados el ángulo y la velocidad del movimiento este pudiera realizarse correctamente. Como los motores utilizados en esta investigación son de 1,8º/paso, para que se logre una vuelta completa (360º) deben darse 200 pasos como se muestra en la ecuación (1). [9]
La secuencia escogida fue la de paso completo dos fases que debe repetirse 50 veces para lograr una vuelta completa. Por lo que para determinar el tiempo que transcurre en dar una vuelta completa el motor, considerando un tiempo de 100 ms de duración entre un pulso y el siguiente se tiene la ecuación (2):
Según la ecuación (2) el motor demora en dar una vuelta completa 20 segundos. Se determinó experimentalmente la distancia recorrida por el robot planar (en un eje) en una vuelta completa de un motor, obteniéndose un recorrido de 4 cm, es decir que en un pulso enviado al motor se recorre 0.02cm, esto lo demuestra la ecuación (3).
Por lo anterior se establece la ecuación (4) para determinar la cantidad de pasos necesarios a enviar al motor para recorrer una distancia deseada:
Luego la velocidad se establece por la ecuación 5.
Para lograr el posicionamiento del robot planar de 2 GDL se utilizaron dos sensores de final de carrera o sensor de contacto. Los sensores de fin de carrera utilizados son SS-5GL27, normalmente abiertos.
Las tarjetas electrónicas para el control de los motores fueron del tipo FT5754M. Las mismas están constituidas por dos pares Darlington, doce diodos y seis resistencias. Su distribución de terminales se muestra en la Tabla 2.
2.3.- CIRCUITO ELECTRÓNICO
En la Fig. 4 se muestra la tarjeta de circuito impresa que se diseñó. Primeramente, se realizaron las simulaciones en el paquete de diseño de circuitos electrónicos Proteus y se diseñó una fuente de 12V para alimentación de los motores paso a paso. Se realizó el montaje eléctrico en la herramienta de Proteus ISIS y en el Proteus ARES se obtuvo el diseño del circuito impreso. Para poder crearlo se realizó la técnica de sumersión en cloruro férrico y planchado. El listado de componentes se muestra en la Tabla 3.

2.4.- PLATAFORMA DE DESARROLLO ARDUINO
La plataforma de desarrollo utilizada fue Arduino UNO, por sus prestaciones y fácil lenguaje de programación. La misma cuenta con 14 terminales digitales y dos terminales de conexión puerto serie que la convierte en ideal para la propuesta [10, 11].
En la Fig. 5 se muestra la conexión entre la placa Arduino, la placa FT 5457M y las bobinas de los motores. Los terminales 6, 7, 8, 9 son los dirigidos a las bobinas del motor 1 y los terminales 10, 11, 12 y 13 a las del motor 2 [12].

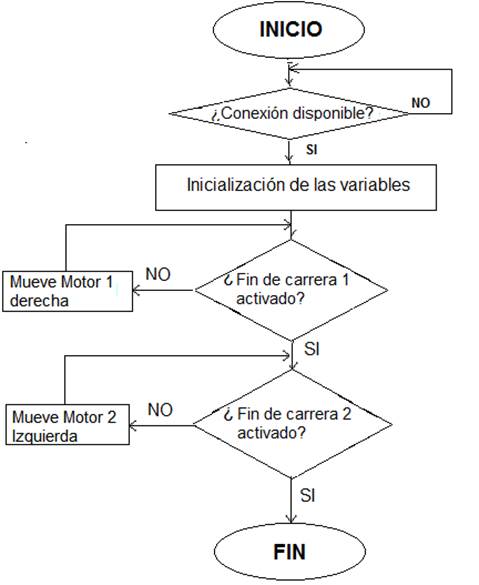
En la Fig. 6 se visualiza el robot planar de dos grados de libertad utilizado para la propuesta en el cual se señalan los fines de carrera FC1 y FC2, el FC1 en la parte superior y el FC2 en la parte inferior, el primero para el Motor 1 que es el que se desplaza de forma vertical hasta la dimensión establecida x, y el segundo para el Motor 2 que se desplaza de forma horizontal barriendo todo el eje y del equipo a caracterizar. Cuando ambos fines de carrera estén activados se logrará la posición inicial del robot. Los diagramas de flujo para conexión y control del robot planar de 2 GDL mediante la plataforma Arduino Uno son los que se muestran en la Fig. 7 y 8. El robot se coloca automáticamente en la posición inicial, utilizando para ello la información brindada por los sensores de fines de carrera. La dimensión del equipo a caracterizar y su intervalo de medición es introducido por teclado en la interfaz de usuario creada en Matlab®, la cual se conecta por puerto serie a la plataforma de desarrollo Arduino UNO para comenzar el recorrido indicado sobre la superficie evitando los errores de tiempo en el momento de sincronizar Matlab- Arduino- Robot. Teniendo en cuenta que el gaussímetro, según datos del fabricante, toma una medición cada 500 mseg, en 1 seg tomaría dos mediciones, luego teniendo en cuenta la velocidad establecida para los motores en la ecuación (5), se demuestra que se almacenarán en 20 seg 40 mediciones habiendo recorrido 4cm, lo que significa que se toman 10 mediciones por centímetro, una cantidad apreciablemente superior en comparación con el método manual.
Se decidió mover un motor a la vez ya que para realizar la matriz de medición en un imán se necesitan tomar los valores de los vectores alineados y en una misma dirección y no de forma dispersa ya que se busca que en el gráfico en 3D pueda verse la disposición de inducción magnética en toda la superficie. El control del recorrido del robot planar de 2 GDL se establece en el diagrama de flujo de la Fig. 8. Realizando los movimientos de izquierda a derecha de los motores para lograr con la velocidad establecida el desplazamiento sobre la superficie del equipo [13].


2.5.- SOFTWARE PARA EL PROCESAMIENTO DE LOS DATOS
Para procesar los datos obtenidos por el sensor de efecto Hall se diseña, empleando el software Matlab®, un sistema informático, el cual contiene una interfaz gráfica de usuario que permite obtener datos como las dimensiones del acondicionador a caracterizar y cantidad de mediciones a realizar que serán enviados a la plataforma Arduino, además cuenta con una herramienta para realizar diversos análisis estadísticos como son los estadígrafos de dispersión y de posición.
En este software se establece la comunicación con la plataforma Arduino Uno a través del puerto serie. La comunicación entre Matlab® y Arduino es bidireccional. Los datos enviados garantizan la inicialización de la posición del robot planar de 2 GDL y que se realice la medición de la inducción magnética de forma automática. Una vez terminada la caracterización del acondicionador, el Arduino le enviará al Matlab® un comando indicando que se ha terminado la medición.
GUIDE es un entorno de programación visual disponible en Matlab® para realizar y ejecutar programas que necesiten ingreso continuo de datos. Tiene las características básicas de todos los programas visuales como Visual Basic o Visual C++. En la Fig. 9 se muestra la interfaz desarrollada. En la parte izquierda, el usuario introduce las dimensiones físicas del imán a caracterizar, largo y ancho, además del intervalo de medición. El botón de Procesamiento de las mediciones hace una llamada a la interfaz de procesamiento de los datos medidos. También cuenta con un botón de Ayuda que explica el funcionamiento del software.
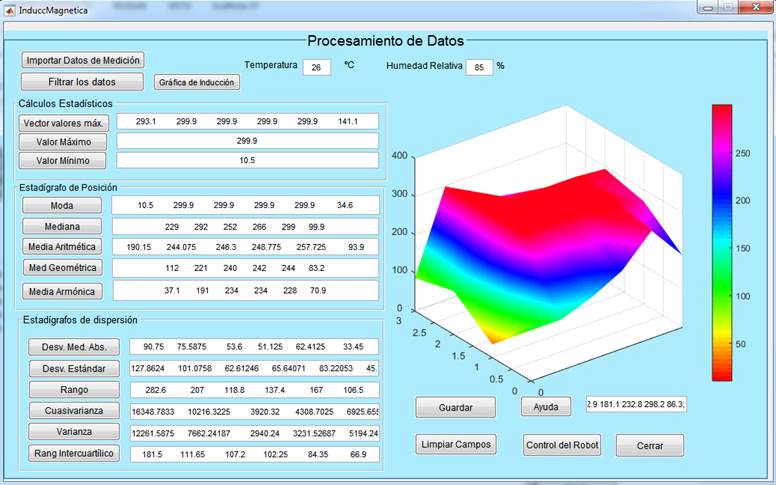
En el software de Procesamiento de Datos se importarán las mediciones seleccionadas por el usuario previamente almacenado en un documento Excel. Al cargarse los valores de medición del imán caracterizado se mostrará automáticamente el mapeo de la inducción magnética en 3D, así como los otros valores de interés que se muestran. La ventana cuenta con un botón para guardar la imagen de la ventana del software, un botón para limpiar los campos por si se desea realizar otra medición, un botón de ayuda y uno para volver a la ventana principal.

3.- RESULTADOS Y DISCUSIÓN
Para mostrar las ventajas de la propuesta sobre el método manual anteriormente utilizado para la caracterización magnética se tomará como referencia un acondicionador magnético de 5cm de largo por 3cm de ancho.
3.1.- MÉTODO CONVENCIONAL
En la Fig. 10 se muestra como se realizaba el trabajo anteriormente de forma manual. La caracterización de un acondicionador se realizaba cuadriculando, utilizando una regla con un paso de 1cm de distancia en una hoja de papel con las dimensiones del imán a caracterizar, luego este se colocaba sobre el acondicionador magnético como guía de los puntos donde se iban a tomar las mediciones. Posteriormente se desplazaba la sonda del sensor sobre cada punto de medición y se tomaban las muestras, para esto fueron necesarias dos personas, una para mover el sensor y la otra para anotar manualmente las mediciones. Se obtuvieron 24 mediciones como puede verse en la Tabla 4, en la Fig. 11 se muestran los resultados obtenidos.

Tabla 4 Valores resultantes de las mediciones por el método convencional (g)
| C1 | C2 | C3 | C4 | C5 | C6 | |
|---|---|---|---|---|---|---|
| F1 | 188.3 | 283.6 | 204.3 | 162.5 | 132.9 | 141.1 |
| F2 | 268.7 | 299.9 | 299.9 | 299.9 | 299.9 | 34.6 |
| F3 | 293.1 | 299.9 | 299.9 | 299.9 | 299.9 | 113.6 |
| F4 | 10.5 | 92.9 | 181.1 | 232.8 | 298.2 | 86.3 |
3.2.- PROPUESTA IMPLEMENTADA
Con la implementación de la nueva propuesta se obtuvieron un total de 300 mediciones almacenadas en una matriz de 6x50. El procesamiento de dichas mediciones se muestra en la Fig. 12. Una de las etapas más importantes en el proceso de investigación se relaciona con la sistematización y análisis de la información denominándose análisis estadístico de la información. La cantidad de mediciones obtenidas en el método propuesto es mayor que las obtenidas de forma convencional, 300 y 24 respectivamente, lo cual repercute positivamente en la calidad de los datos, debido a que algunos intervalos de medición no son tomados teniendo como consecuencia que se obvien datos de medición.
El Gaussímetro FW Bell se conecta por el puerto USB con la computadora permitiendo almacenar los datos de medición en un documento Excel, uno de los principales aportes de este trabajo es que a través de la interfaz gráfica de usuario los datos podrán ser procesados de forma automática oprimiendo el botón de Importar Datos de Medición [14].
Como se infiere, el proceso de medición magnética manual en sistemas como estos es excesivamente laborioso, consume una enorme cantidad de tiempo y se puede ver afectado fácilmente por errores de posicionamiento espacial y precisión debidos a una incorrecta operación del gaussímetro como consecuencia del cansancio humano. A las dificultades anteriores se suma el hecho de que los valores obtenidos como resultado de cada medición son registrados manualmente por otra persona además de la que opera el gaussímetro. Debido a estas limitaciones se toman menor cantidad de muestras las que no reflejan con exactitud los valores de inducción magnética en toda la región de trabajo del equipo a caracterizar; sin embargo, con el método propuesto se toman mayor cantidad de mediciones con mayor exactitud y precisión brindando una caracterización más fiel de la realidad.

3.3. VALORACIONES DE EXPERTOS
Para la validación de los resultados se contó con la valoración de investigadores que necesitan el servicio de caracterización magnética. Los expertos consideran que el trabajo se enmarca en una temática de actualidad al abordar el tema de las disímiles aplicaciones del electromagnetismo, ya que la automatización de este tipo de medidas se hace cada vez más necesaria para sus investigaciones por la precisión que esta acredita al posicionar y desplazar la sonda de efecto Hall sobre la superficie del equipo que se caracteriza. Al desarrollar un software que controle el plotter y pueda tomar de forma automática y almacenar todas las mediciones que anteriormente se realizaban de forma manual sin exactitud, constituye un paso de avance para el Laboratorio de Caracterizaciones Magnéticas del CNEA ya que este es el único laboratorio del país, líder en esta medición y ahora contará con mediciones más confiables y robustas.
Todos los investigadores en sus tesis de doctorado e investigaciones que se desarrollan en el centro han necesitado caracterizar un equipo de este tipo, y este trabajo servirá para que el tiempo de entrega de los resultados sea más rápido y eficiente brindando además una herramienta para procesar los datos obtenidos. Es bueno significar que todos los cálculos estadísticos incluidos en el software fueron a solicitud de los investigadores del centro.
4.- CONCLUSIONES
Se diseñó un equipo automatizado que realiza las mediciones de inducción magnéticas de forma más eficiente y precisa. Se realizó el software de control del robot, almacenamiento y procesamiento de las mediciones con el programa MATLAB, el cual cumple con todas las características necesarias, pero el mismo es un paquete propietario por tanto se recomienda hacer la interfaz con un software no propietario. A pesar de que este trabajo cuenta con valoraciones satisfactorias de expertos, se recomienda que el mismo sea tenido en cuenta en el proceso para la certificación nacional del sistema de caracterización magnética el cual está actualmente en proceso para así validarlo conforme al cumplimiento de las normas requeridas en el proceso de certificación.

