










 Servicios personalizados
Servicios personalizados Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Existen diferentes causas que impiden el movimiento muscular en una persona, para lo cual en algunos casos no se encuentra un tratamiento médico que detenga el progreso de la enfermedad. Sin embargo, existen ayudas tecnológicas que permiten a las personas con discapacidad mejorar sus habilidades para ayudarlos a vivir de forma autónoma y participar en sociedad o, por lo menos, mejorar su calidad de vida. Actividades tan sencillas, como levantar el brazo para comer o cepillarse los dientes, constituyen un reto para las personas con impedimento muscular por la disminución de la fuerza y la falta de movilidad. Para ello, la tecnología asistida ha desarrollado múltiples opciones en función de mejorar la calidad de vida de estos pacientes.
En los artículos 20 y 26 de la Convención sobre los Derechos de las Personas con Discapacidad,1 en la Resolución WHA58.23 de la Asamblea Mundial de la Salud2 y en los 22 artículos de las Normas uniformes sobre la igualdad de oportunidades para las personas con discapacidad1 se subraya la importancia de los dispositivos de apoyo para pacientes con discapacidad.
Tomando en consideración lo expuesto por Sosa y otros3 en el artículo denominado Diseño de un prototipo de exoesqueleto para rehabilitación del hombro; la discapacidad motora es un problema a nivel mundial y según el censo del Instituto Nacional de Estadística y Geografía (INEGI) realizado en el año 2010 en México, las personas con problemas de movilidad representan el 58,3 % de la población con discapacidad.
Para afrontar esta problemática se desarrolló un dispositivo cuyo objetivo era generar los tres movimientos básicos del hombro que son la flexión-extensión, la abducción-aducción y la rotación interna-externa, considerando las medidas antropométricas de la población objeto de estudio. Para el diseño del prototipo se utilizó una adaptación de la metodología de diseño mecatrónico de robots. El diseño propuesto fue validado mediante simulaciones numéricas en Matlab® y en ADAMS™ y se comprobó el rango de movilidad de cada articulación
Por otro lado, en Colombia la investigación de Luengas4Algoritmo de metodología para desarrollar dispositivos mecatrónicos como ayuda a personas con distrofia muscular se enfocó en generar un algoritmo que permitiera desarrollar un dispositivo mecatrónico como ayuda tecnológica a personas con discapacidad física. En esta investigación se tomó como fundamento un diseño de estudio de tipo descriptivo para proponer la metodología de diseño e implementación de dispositivos de ayuda técnica en personas con distrofia muscular. La propuesta hizo referencia al conjunto de técnicas, procedimientos y soportes documentales empleados en el diseño de sistemas de ayuda técnica. Esta investigación obtuvo resultados favorables, al concluir que en el área de la rehabilitación física es conveniente combinar los conocimientos médicos con los ingenieriles para obtener soluciones tecnológicas que les faciliten las actividades a personas con discapacidad física.
Teniendo en cuenta estos estudios como referencia, entre otros, la investigación tuvo como propósito evaluar el impacto de la implementación de un dispositivo para personas con discapacidad, que interactúa con el usuario, transmite una fuerza externa que estimula los músculos y facilita la realización de movimientos que, por sí solo, resultan forzosos y dolorosos. Es un dispositivo portátil, inalámbrico y comprende una interfaz entre humano y máquina; responde a una serie de especificaciones, cuyo fin es ayudar a la estimulación y recuperación de los músculos atrofiados en personas que presentan discapacidad motriz en las extremidades superiores; mejorar su calidad de vida, al ofrecerle una autonomía, en cuanto a la realización de tareas básicas y desenvolvimiento en el contexto social. Junto a los estímulos electrónicos permite a la persona realizar las distintas terapias prescritas por el fisioterapeuta sin ningún impedimento. Por lo cual el estudio evaluó el impacto de la implementación de un dispositivo que ayuda a la recuperación de los músculos atrofiados en extremidades superiores en personas con discapacidad motriz, por medio de la aplicación de una placa Arduino.
Métodos
La investigación fue de tipo tecnológico-descriptivo, ya que incluye un análisis de resultados y la experimentación para lograr caracterizar el problema de estudio. La población de estudio estuvo conformada por las personas con discapacidad muscular en extremidades superiores (brazo) en el Municipio de Montería. En total fueron 270 personas, de las cuales se conformó una muestra de 20 del municipio de Montería, seleccionadas de forma aleatoria por conveniencia según criterios de accesibilidad geográfica y voluntad de participación en el estudio. A cada uno de ellos se les implementó el dispositivo en cuestión.
Se recurrió al análisis documental sobre dispositivos en procesos de rehabilitación física. Se empleó la técnica de la observación y encuesta a través de un cuestionario estructurado para verificar los requisitos de información que hacen referencia a la captura de datos que requiere el sistema para medir el impacto y en el que se registran los 20 usuarios y las respuestas a cada estimulación.
En el procesamiento de los datos se utilizó la estadística descriptiva para analizar los resultados de las respuestas y se tabularon, considerando las respuestas con valores más cercanos a 100 % como respuestas favorables que se encontraron más cercanas al impacto positivo de las dimensiones de eficacia, satisfacción, oportunidad y comodidad. Las dimensiones cuyos valores de respuestas se alejaron del 100 %, se señalizaron como de impacto inferior.
Se tuvo en cuenta la Resolución 008430 del 4 de octubre de 1993 del Ministerio De Salud, “por la cual se establecen las normas científicas, técnicas y administrativas para la investigación en salud”.5 Esta investigación se clasificó de riesgo mínimo, porque es un estudio que utiliza el registro de datos a través de procedimientos sencillos sin ningún tipo de intervención que pusiera en riesgo la salud de la población objeto de estudio.
En el estudio se actuó con el respeto de los principios éticos de benevolencia, anonimidad y confidencialidad para el manejo de la información suministrada y que esta sería usada sólo con fines académicos.
Resultados y discusión
Se logró evaluar el impacto de la implementación de un dispositivo en personas con discapacidad motriz en extremidades superiores de manera positiva. Se evidencia que es posible insertar la electrónica en el campo de la salud, específicamente en el ámbito de rehabilitación muscular, puesto que ofrece un desarrollo óptimo de los ejercicios que deben realizar los pacientes.
Asimismo, se corrobora en los resultados tras las pruebas ejecutadas a la población objeto de estudio; en el que el objetivo fue alcanzado, lo que legitima el impacto que ha tenido el dispositivo de acuerdo con las respuestas a las preguntas registradas por los usuarios; se evidencia la eficacia, la comodidad y la practicidad del dispositivo en cuestión.
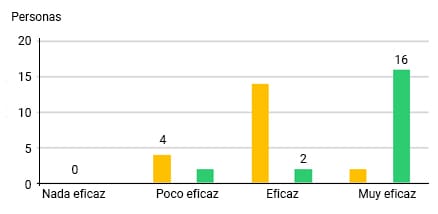
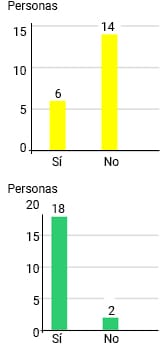
Los resultados presentados reflejan las respuestas obtenidas antes y después de utilizar el dispositivo electrónico en relación con la incidencia del dispositivo en la realización eficaz de los ejercicios de rehabilitación, así como la comodidad, seguridad y confianza que genera en el usuario. Es preciso aclarar que en las gráficas siguientes los datos de color amarillo representan los datos obtenidos antes de implementar el dispositivo electrónico (Helpbot) y los resultados de color verde, señalan los obtenidos, tras implementar el Helpbot en la población. Con base en lo anterior, se describen los resultados obtenidos.
En la figura 1 se puede observar que antes de la implementación del dispositivo electrónico siete de los 14 usuarios señalan que los ejercicios de rehabilitación realizados por el personal médico son eficaces. Sin embargo, después de implementar el dispositivo electrónico 16 usuarios indican una mayor eficiencia por parte del Helpbot. Lo que señala una respuesta satisfactoria, ya que implica que los usuarios se sintieron cómodos al desarrollar los ejercicios con el dispositivo electrónico.
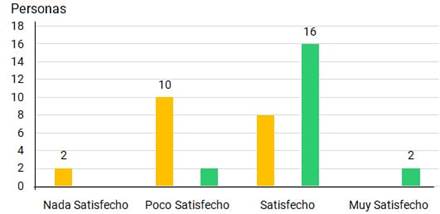
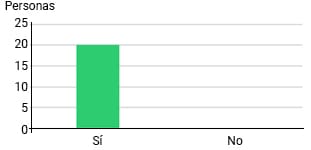
En la figura 2 se aprecia que el 60 % de la población señala que antes de la implementación del dispositivo electrónico, en aras de la comodidad no se sentían muy satisfechos con la realización de los ejercicios, debido a que el proceso resultaba doloroso; sin embargo, después de utilizar el dispositivo electrónico, aunque las sesiones siguieron siendo dolorosas, puesto que consiste en mover músculos atrofiados del cuerpo, el 80 % de los pacientes demostró un mejor respuesta ante el dispositivo. Esto señala que el Helpbot genera una sensación de confianza en los usuarios, representado en el número de usuarios que respondieron sentirse satisfechos al realizar los ejercicios con él.
 Fuente: Elaboración propia.
Fuente: Elaboración propia. Fig. 2 - Satisfacción con el dispositivo electrónico al realizar ejercicios.
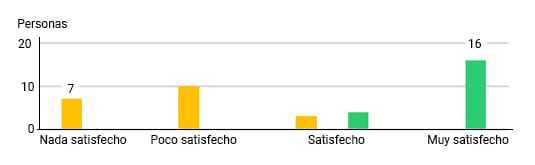
En la figura 3 se evidencia que el 80 % de los encuestados afirmó que se siente muy satisfecho con el seguimiento que se le hace a su tratamiento por medio del software que acompaña al dispositivo electrónico, lo que señala que, además de ayudarlos a realizar los ejercicios, pueden registrar los avances que obtienen en cada sesión. En el pretest desarrollado se representó con barras de color amarillo la respuesta a la siguiente interrogante: ¿Cómo se siente usted con el control y seguimiento de su tratamiento? Solo tres de las 20 personas respondieron en la escala de satisfecho, lo que motivó la construcción del Helpbot, puesto que la población presentaba una necesidad que debía ser abordada.
 Fuente: Elaboración propia.
Fuente: Elaboración propia. Fig. 3 - Satisfacción con el seguimiento del tratamiento por medio del software.
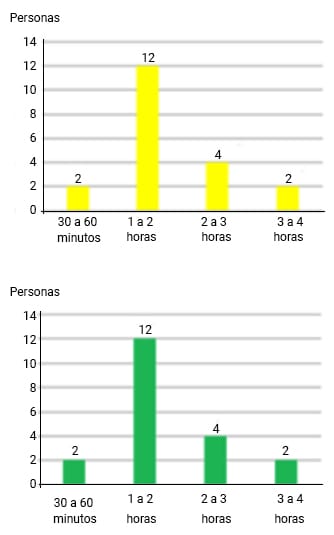
La figura 4 hace referencia a la respuesta obtenida de la pregunta realizada en el pretest (identificada con el gráfico amarillo): ¿Cuánto tiempo emplea usted para movilizarse al centro de rehabilitación? El gráfico de color verde señala la respuesta de la población a la pregunta: ¿Cuánto tiempo ahorra usted por implementar el dispositivo electrónico en su hogar? Las preguntas están dirigidas a medir el tiempo que emplean los pacientes al movilizarse al centro de rehabilitación para realizar los ejercicios, teniendo en cuenta que el dispositivo Helpbot se caracteriza por la funcionalidad de poder usarse en la comodidad del hogar, sin necesidad de desplazarse a otro sitio para que la persona desarrolle sus ejercicios, gracias a su asistencia particular e individual.
 Fuente: Elaboración propia.
Fuente: Elaboración propia. Fig. 4 - Oportunidad en el tiempo de movilización en el centro de rehabilitación.
En este sentido se observa que antes 12 de los usuarios demoraban de una a dos horas para llegar al centro de rehabilitación, pero, tras la implementación del dispositivo electrónico se muestra que los usuarios redujeron en su totalidad el tiempo invertido en el desplazamiento al centro médico, puesto que al tener el asistente en casa no es necesario trasladarse a otro sitio, lo que implicó también un ahorro monetario en los usuarios y evidenció el impacto positivo del dispositivo en la población.
En la figura 5 las barras amarillas representan la siguiente pregunta: ¿Se siente usted cómodo en las instalaciones del centro de rehabilitación? y en las gráficas de color verde se representa la respuesta a esta pregunta: ¿Se siente usted cómodo al realizar las terapias en su hogar? Partiendo de las preguntas realizadas antes y después de implementar el dispositivo electrónico Helpbot, como ayuda técnica en la rehabilitación de la discapacidad motriz en extremidades superiores, se observa que los pacientes no se sentían placenteros en las instalaciones médicas, ello porque el espacio institucional le genera en la persona una sensación de malestar y enfermedad mayor al grado que presenta, así como también puede causar depresión o tristeza en el paciente, al sentirse incapaz de moverse con facilidad y requerir de la ayuda de otras personas y verse expuestos también a ser observados por todo el personal que ingrese al centro.
No obstante, la sensación dejó de existir tras ofrecerle a los pacientes la oportunidad de realizar sus ejercicios en casa y así fortalecer su seguridad y emotividad, al brindarle una herramienta particular que personalizará sus ejercicios y lo ayudará a avanzar en cada una de las indicaciones dadas por el cuerpo médico. La mayoría de los usuarios estuvieron de acuerdo con la comodidad que le ofrece el Helpbot al poder utilizarlo en el hogar.
Después de utilizar el dispositivo electrónico Helpbot, según se observa en la figura 6, los usuarios manifestaron sentirse muy cómodos con el artefacto, así como les facilitó el desarrollo de los ejercicios terapéuticos para avanzar exitosamente en cada uno de ellos. De igual forma, el impacto positivo del dispositivo se refleja en la medida en que el 100 % de la población recomendaría el dispositivo electrónico, tal como se muestra en la gráfica anterior, por lo que la intervención electrónica fue exitosa.
 Fuente: Elaboración propia.
Fuente: Elaboración propia. Fig. 6 - Recomendación de la implementación del dispositivo electrónico.
Con base en lo anterior, las pruebas del dispositivo dieron resultados favorables, lo que sustenta la idea de que la implementación de dispositivos como soporte técnico en la rehabilitación de la discapacidad motriz en miembros superiores resulta beneficioso para la población, en calidad de pacientes, así como también ofrece una herramienta de apoyo para el cuerpo médico.
Asimismo, se ha logrado con éxito el diseño y desarrollo de un software que recoge los datos suministrados por el dispositivo, lo que corrobora la viabilidad del proyecto, ya que permite una mejor visualización acerca de lo logrado con la digitalización de la información obtenida. Por medio de este equipo electrónico se le ofrece a la comunidad médica y a los pacientes una mejor gestión y almacenamiento de las terapias, resultados, avances, historial y diagnóstico.
El Helpbot brindó un apoyo eficiente, al responder satisfactoriamente a las necesidades de la población discapacitada. Además, propició un sentimiento de seguridad, confianza y autonomía en el paciente al ofrecerle la oportunidad de manejar y controlar sus terapias desde su hogar, así como implementarlo personalmente sin requerir de un personal médico al lado. Este resultado es similar a lo manifestado por Acevedo y otros6) en el que manifiestan satisfacción con robot social diseñado especialmente en la rehabilitación de miembros superiores con discapacidades motoras como hemiplejia.
En otros estudios se evaluaron las actividades mediante GAS y Nine hole peg, cuyo resultado mostró mayor motivación respecto a las terapias tradicionales. Asimismo, Calderita y otros,7 apropiándose del potencial de los robots sociales, desarrollaron THERAPIST, un ambiente tecnológico compuesto por un software con múltiples funciones y la plataforma robótica URSUS,8 el cual es un sistema interactivo más completo para asistencia en neurorehabilitación.
Otros autores9,10,11,12,13,14,15 establecen que los dispositivos interactúan con el paciente mediante la percepción de movimientos y la realización de acciones específicas y al terapeuta le brinda herramientas administrativas, de monitoreo y planeación de tareas.
Del mismo modo, los resultados representados en los gráficos anteriores demuestran el grado de aceptación que tuvo el dispositivo por parte de los pacientes, al conseguir datos positivos, reflejados en los gráficos de color verde. Esto es similar a lo que se concluye en el estudio de Carignan y otros,14) en el que luego de la adaptación de un dispositivo de percepción háptica denominado PHANTOM Omni, se observó el aumento de la motivación en la terapia, utilizando el robot.
Tras este estudio se comprobó cómo la introducción de la electrónica en el sector de la salud mejora el rendimiento de las prácticas de rehabilitación, ya que, a través de ella, se realizan los procesos de optimización de las tareas. Además de brindar una movilidad más segura y minimizar la posibilidad de accidentes en el momento en que el paciente se traslada al centro de rehabilitación, puesto que el dispositivo ofrece la oportunidad de desarrollar los ejercicios de rehabilitación en el hogar. Este resultado es contrario al obtenido por Yakub y otros,15 en el que, a través de un dispositivo con realidad aumentada, se brindó la posibilidad de hacer terapias y estudios de rehabilitación del miembro superior con lesiones causadas por la parálisis cerebral. Para evaluar las actividades se usaron las escalas Melbourne Assessment of Upper Limb Function y ABILHAND-Kids. Como resultado se observó que no hubo cambio en la calidad de los movimientos del miembro superior; sin embargo, se aumentó el uso del miembro superior en la vida diaria.
El uso de este tipo de herramientas electrónicas permitió lo planteado al inicio de esta investigación, al manifestarse en una mejor gestión de los ejercicios y del historial clínico del paciente, así como el control progresivo del usuario y, sobre todo, la generación de confianza y estabilidad en los usuarios a medida que se logra un buen desempeño de las funciones del dispositivo.
Definitivamente, un proyecto de investigación basado en el desarrollo e implementación de un dispositivo electrónico para personas con discapacidad motriz en extremidades superiores representa una valiosa contribución y colaboración con la medicina, la tecnología, la electrónica y la innovación. Esta idea la reafirma Acevedo y otros,6) al concluir que su estudio de la literatura reportada sobre el uso de nuevos dispositivos, software y protocolos de terapia; aunque son escasos (…) o no tienen aplicación alguna, las terapias con sistemas robóticos están demostrando ser igual de efectivas frente a las terapias convencionales, bajo los mismos parámetros de intensidad y tiempo de tratamiento. No obstante, se debe entender que el propósito de los robots en las terapias es ser una herramienta; en ningún momento puede sustituir el papel del fisioterapeuta o médico especialista para orientar la terapia e interpretar los resultados.
Se presentaron limitaciones con respecto al acceso geográfico y económico para la inclusión de más pacientes, por lo que se recomienda en futuras investigaciones ampliar su alcance y hacerlo desde espacios institucionales.
Conclusiones
Los objetivos especificados al inicio de esta investigación se han logrado satisfactoriamente, al brindar una forma de demostrar la factibilidad y utilidad de la electrónica en el área de la salud en cuestión, así como demostrar el alcance de la tecnología en la optimización de herramientas que faciliten el desarrollo de tareas y brinden una mejor comunidad a la población afectada.
En lo que respecta al impacto del dispositivo se obtuvieron resultados significativos, en cuanto a la recuperación motriz de los miembros superiores de la población, al tiempo que se ofreció un dispositivo interactivo e innovador para la población, además de haber diseñado un dispositivo accesible y asequible para la población.
El desarrollo del dispositivo ofreció una solución electrónica que apunta hacia la mejora de la calidad de vida de los pacientes, en la medida en que desarrolló en los usuarios sentimientos de confianza, seguridad y autoestima consigo mismo, junto con la oportunidad de involucrarse en su proceso de rehabilitación por medio de un instrumento dinámico, cómodo, portátil y seguro, que mejora y fortalece los procesos terapéuticos, lo que aseguró el éxito de la investigación.

