










 Servicios personalizados
Servicios personalizados
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
La paraplejia es una condición que ocasiona que la parte inferior del cuerpo se paralice provocando problemas multiorgánicos.1 Por tal motivo, se requiere realizar ejercicios fisioterapéuticos para la prevención de complicaciones del encamado y potenciar la funcionalidad del cuerpo, para conseguir un cierto grado de rehabilitación.2) Según el Consejo Nacional para la Igualdad de Discapacidad en Ecuador, la cifra de parapléjicos está alrededor de los 408 021, de los cuales 193 520 tiene alguna discapacidad física, cantidad que representa el segmento más grande del total de discapacitados en el país.3
La falta de un adecuado tratamiento para personas con paraplejia generalmente está relacionada a la falta de recursos económicos,4 lo cual obliga a las personas incapacitadas físicamente a buscar instituciones de ayuda social que solucionen o disminuyan la falta de movilidad y sensibilidad en la parte del tórax y los miembros inferiores. Sin embargo, no todas las instituciones cuentan con equipos que proporcionen una correcta rehabilitación, debido a la complejidad para realizar posiciones antropomórficas en personas con retos físicos.5
Las personas con paraplejia suelen tener otros problemas, entre los que se incluyen el mal funcionamiento de la vejiga e intestinos.6 También sufren incapacidad para regular la temperatura corporal7 y pueden padecer de presión arterial baja, esto significa que, mantener una postura sedente por largos lapsos de tiempo acarrea complicaciones agregadas a las de la propia discapacidad motriz.8
Actualmente existen dispositivos de asistencia, pero la mayoría obligan al paciente a permanecer sentados, con lo cual la incapacidad sensitiva produce un reflejo espástico en masa con gran aducción de las piernas. Es por esto que se requiere de un sistema mecatrónico que sirva como dispositivo de asistencia, que otorgue una verticalidad del cuerpo de personas con movilidad reducida y con una hipotonía parcial, para así evitar los fenómenos de hipotensión.9,10).
La mecatrónica es una rama de la ingeniería que permite el diseño de equipos de asistencia a personas con discapacidad como la paraplejia, para mejorar su calidad de vida, en este sentido se han reportado diversas investigaciones acerca del uso del bipedestador,11,12 cuyo objetivo es, mediante la ayuda mecánica, colocar en posición bípeda a personas con discapacidad, que generalmente están postradas en una cama, lo que permite mejorar la postura,13 tonificar y elongar sus músculos,14 ejercitar su sistema gastrointestinal y urinario,15 cardiovascular y óseo,16 aumentar la capacidad respiratoria17 y evitar úlceras por compresión en los tejidos.18
El objetivo de esta investigación fue desarrollar un sistema mecatrónico que permita la bipedestación de personas con condición de paraplejias. El implemento propuesto posee un sistema reajustable que permite su adaptación a un rango mayor de usuarios, facilitaría la recuperación y disminuiría los problemas orgánicos asociados a esta condición, con lo cual se mejoraría la calidad de vida e igualmente disminuiría la morbilidad.
Métodos
Ámbito de la investigación
La investigación fue desarrollada en el Hogar de Vida “Luis Maldonado Tamayo” y en CONADIS, Latacunga, provincia de Cotopaxi, Ecuador. En estas instituciones se atienden personas con condición de paraplejia, en su mayoría de la tercera edad. La población con esta condición en ambos centros de rehabilitación esta conformadas por 20 personas adultas que requieren del equipo de bipedestación. De estas 20 personas, el 70 % son adultos mayores de 60 años, 76 % presentan condición de paraplejia, 69 % son del sexo masculino. La mayoría (63 %) son talla < 1, mientras 25 % presentan talla que va de 1,2 a 1,5.
Selección de alternativas de bipedestadores
Para la selección se empleó el método de criterios ponderados, concluyendo que la mejor alternativa en un bipedestador semiautomático, con multifuncionalidad, diseño ergonómico y que se ajustara a las medidas antropométricas de diversos usuarios. Además, debía cumplir con las siguientes características: bajo costo, cómodo, seguro, fácil de trasladar, amigable, bajo mantenimiento y duradero.
Material usado para la construcción
Para la selección del material se utilizó el software CES EduPack, estableciéndose límites con base en los siguientes parámetros: precio, límite elástico, resistencia a la tracción y elongación. Una vez analizado cada uno de estos parámetros, se consideró al acero ordinario la mejor opción en función del precio y sus propiedades mecánicas.
Selección de tarjeta controladora
Se realizó la comparación de dos tarjetas: Arduino y Raspberry, en función del costo, capacidad multitarea, método de entrada, velocidad de procesamiento, capacidad de memoria, procesador, entorno y calidad de video. La tarjeta Raspberry fue la seleccionada por ser una minicomputadora independiente que puede realizar varias tareas.
Selección del motor
Para la selección se consideraron los parámetros: vida del motor, seguro de sobrecarga, velocidad, eficiencia, costo, ruido, vibración y resonancia, tamaño y disponibilidad. Se realizó una matriz de ponderación en la que se seleccionó el motor a pasos.
Selección del actuador
Se hizo una comparación de tres actuadores (neumático, hidráulico y eléctrico) en función de: energía, costo, sonido, elementos de entrada, elementos de trabajo, instalación y control. El más idóneo fue el actuador eléctrico.
Selección de batería
Se compararon 5 baterías: Ni-Cd; Ni-MH; Ácido-Plomo; Li-ión Cobalto; Li-ión Mn y Li-ión fosfato. Se evaluaron en función de: tolerancia a sobre carga, costo, tiempo de carga, tiempo de operación, seguridad, mantenimiento y autodescarga. Una vez aplicada la matriz de ponderación se seleccionó la batería de Ácido-Plomo.
Diseño sistema mecánico
Se hizo un análisis cinemático para conocer las trayectorias que debe seguir el equipo para colocar a la persona en posición bípeda. Esta trayectoria varía en función de la parte del cuerpo: cavidad abdominal-pélvica, cadera, rodillas, tobillos y pies, dando mayor relevancia a la parte de la cavidad abdominal-pélvica, en función de ello se calculó la trayectoria en términos de distancia (m) y ángulo de desplazamiento. Se consideraron las medidas antropométricas de mujeres y hombres tanto en localidades rurales como urbanas, permitiendo establecer las dimensiones del mecanismo. Una vez calculados los ángulos y longitudes de interés se estableció el dimensionamiento del mecanismo.
Partes del bipedestador
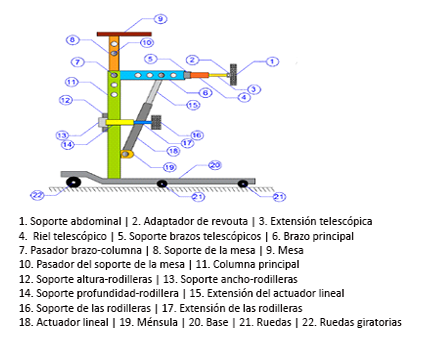
Para el diseño del bipedestador, el cual debe elevar al usuario y a sus componentes, se inicia con un esquema de sus partes principales como se muestra en la figura 1.
Dimensiones del bipedestador
El establecimiento de las dimensiones de las partes del bipedestador se hizo con base en las medidas antropométricas provistas.
Análisis de cargas
Para obtener la forma adecuada para analizar el mecanismo se planteó el uso de operaciones del álgebra vectorial, para el cálculo de las cargas que deben soportar los diferentes sistemas del equipo. El sistema de rodillera fue un punto de apoyo necesario para la inmovilización de las personas con paraplejia y su resolución es de manera similar al presentado en los brazos telescópicos largos que deben soportar el sistema de rodillera que se resumen en la tabla 1.

Diseño del simulador
Una vez concluidos los cálculos analíticos para el diseño del bipedestador es realizó una simulación del mecanismo y sus partes, para corroborar la veracidad del diseño, mediante el uso del software SolidWorks para realizar el modelado y ensamblado de las piezas, a fin de obtener al bipedestador como un conjunto para que soporte las cargas definidas.
Diseño electrónico
Actuador
Se seleccionó un actuador lineal de la serie CAHB, por las siguientes características: accionamiento de tornillo ACME, tubo de extensión de aluminio; tubo de protección de aluminio; carcasa de engranajes de aleación de zinc; engranajes de metal en polvo y sistema autoblocante.
Motor a paso
Se trabajó con un motor paso a paso de 4 hilos, debido a que esta configuración de cableado es adecuada para aplicaciones que requieren un alto torque a velocidades relativamente bajas de 407,43 rpm. El motor estaba acompañado de una caja reductora como medida de seguridad que funcionaba como freno en caso de que el sistema se quede sin energía, por lo cual debe cumplir con un torque 0,8618 Nm.
Controladores para actuadores y motores
Se usó un controlador Pololu, dado que suplen las necesidades de corriente y voltaje. Para el motor a paso se optó por usar el driver A4988, debido a su facilidad de implementación y a que puede suplir los requerimientos de los motores a pasos seleccionados.
Interfaz usuario-máquina
En el diseño de la interfaz usuario-máquina se utilizaron colores para atraer la atención del usuario. Se usó el software ColorImpact para obtener una combinación de colores y estudiar la armonía que estos presentan. El color azul se eligió como color base.
Aplicación
Para controlar al bipedestador y los elementos que lo conforman, por ejemplo: los actuadores lineales que sirven para la elevación del usuario, se requiere de una tarjeta controladora como la Raspberry Pi 3B, la cual recibe determinada información por parte del usuario a través de la pantalla de visualización y también obtiene datos provenientes de los sensores.
Modo de ejecución
La interacción entre el usuario y el bipedestador se hace a través de la pantalla. La interfaz de usuario fue diseñada de forma que proporcione información relevante sobre la etapa y el estado en que se encuentra el bipedestador.
Medición de peso del usuario
Para poder controlar al actuador lineal que permite elevar y descender al usuario se necesita de sensores de fuerza; por tal motivo se empleó una balanza electrónica comercial, debido a que esta ya tiene incorporado cuatro celdas de carga con las cuales se puede conocer el valor exacto de la masa del usuario.
Pruebas de funcionamiento
Como primera prueba se evaluaron los distintos sistemas del bipedestador. En un inicio el examen se realizó sin carga.
Pruebas sin carga
En lo concerniente al sistema de ajuste para las rodilleras, se verifica sus rangos de desplazamiento, con la ayuda de un flexómetro se mide la profundidad.
Pruebas con carga
Con la ayuda de instrumentos de medición para corriente, voltaje y temperatura, se procedió a realizar la comprobación de los valores obtenidos una vez que a los sistemas se le va incrementando carga. Los sistemas por analizar son los de elevación y de brazos telescópicos.
Pruebas con personas con discapacidad
Se comprobó el sistema mecatrónico como un conjunto con el usuario. En este caso se realizaron pruebas con cinco personas que padecen diferentes discapacidades y con diferentes pesos y alturas.
Validación
Se recolectaron datos a través de una encuesta aplicada a los 20 usuarios con problemas de paraplejia en el Hogar de Vida “Luis Maldonado Tamayo” y en CONADIS. Las interrogantes planteadas fueron: ¿Considera usted qué el tamaño del bipedestador es adecuado? ¿Cuál es el grado de transportabilidad que ofrece el bipedestador? ¿Es difícil usar la máquina y ponerla en marcha? ¿En cuanto a seguridad, cuál cree que es el nivel de aseguramiento? ¿El aspecto estético de la máquina es idóneo? ¿Cree usted qué el bipedestador es cómodo? ¿Cuáles serían sus recomendaciones para mejorar el equipo?
Resultados
En la tabla 2 se pueden observar las pruebas del sistema sin carga. Para el ajuste de las rodilleras, se verificaron los rangos de desplazamiento con la ayuda de un flexómetro. El error máximo para el sistema de rodilleras fue de 9,09 %, este se produce debido a la limitación que provoca el rodamiento interior, para evitar que se desvíe y roce con el piñón que se colocó al final de carrera, por lo que le resta de longitud.
Con respecto al sistema de rodillera (ancho), la apertura del mecanismo genera un error del 4 %, el mismo se encuentra dentro de los parámetros permitidos.
El ángulo que se genera a medida que el actuador se va elevando, así también como la carrera de este, se calculó el error que se genera tanto en la posición final como inicial y se obtuvo que los errores máximos eran 16,67 % y 14,93 %, respectivamente. Estos errores surgen a causa de las dimensiones del actuador lineal previamente establecidos por el fabricante y del dimensionamiento del eslabón que corresponde al actuador, lo cual afecta el ángulo del sistema de elevación debido a las limitaciones del tamaño del actuador lineal.
El porcentaje de error generado en el funcionamiento de los brazos telescópicos (izquierdo y derecho) fue 6,25 % y, a diferencia del actuador para el sistema de elevación, estos actuadores lineales tienen integrado un circuito de retroalimentación propio, lo que permite que el error sea bajo.

Para realizar las pruebas con carga se emplearon instrumentos de medición para corriente (voltaje) y temperatura. Se comprobaron los valores obtenidos una vez que se fue incrementando carga a los sistemas. Las rodilleras no fue necesario someterlas a carga, debido a que los motores son usados solo para posicionar el punto de apoyo. Los resultados de esta evaluación se observan en la tabla 3.
El consumo de corriente y la temperatura van en aumento a medida que se incrementa el valor de la masa utilizada, lo cual coincide con los diagramas de consumo “corriente vs. carga” para los actuadores de los brazos telescópicos y también para el actuador lineal que se encarga de la elevación, según lo establecido en las normas técnicas.
Tabla 3 Funcionamiento de sistemas de elevación brazos telescópicos de un bipedestador con carga para la asistencia de personas con paraplejia

Una vez realizadas las pruebas de funcionamiento se procedió a evaluar el uso del equipo mediante con la participación de pacientes con paraplejia. El funcionamiento del equipo por parte de los usuarios se realizó mediante una tabla de ponderación donde se consideraron factores de tiempo, ajuste, funcionalidad y operatividad, cuyos resultados se resumen en la tabla 4
Tabla 4 Pruebas de funcionamiento de bipedestador en personas con paraplejia en dos hogares de cuidados para ancianos de la provincia de Cotopaxi, Ecuador
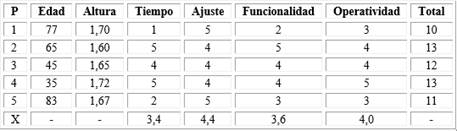
5 Excelente | 4 Muy bueno | 3 Bueno | 2 Malo | 1 Muy malo | 0 No funciona.
Las pruebas de funcionamiento muestran que los atractivos más importantes del equipo son su capacidad de ajuste (permitiendo su uso a personas con diferencias antropométricas) y la operatividad. Los puntos desfavorables para su uso el tiempo que tarda el equipo en colocar a la persona en posición bípeda, así como la funcionalidad del equipo. Sin embargo, estos aspectos pueden mejorarse para optimizar el funcionamiento del bipedestador.
El funcionamiento del equipo no fue solamente evaluado desde el punto de vista técnico, sino que se consideró el grado de confort de los usuarios. En términos generales, el 87 % de los encuestados estuvieron conformes con el uso del equipo en términos de tamaño y el 87,5 % consideraron que era fácil de trasladar. Con respecto a la operatividad, un 63 % consideró que no presenta dificultad en su uso, el 87,5 % expresó que hay un nivel de seguridad medio y el total de los encuestados coincidió en que su color y forma es idónea.
El costo total del equipo fue de $5893,01 USD. Comparando este costo con los precios de otros equipos similares, se establece que la máquina mecatrónica diseñada es un 45 % menos costosa que las existentes en el mercado al momento de escribir este artículo (2020).
Discusión
Es importante la magnitud del error, pues en algunos casos las variaciones antropométricas entre los pacientes causa que los sistemas de elevación y descenso provoquen movimientos bruscos que causa lesiones en los pacientes, en especial, en zonas sensibles como las rodillas.19
Para minimizar los efectos de la elevación, Abdullah y Kausar12 propusieron un modelo dinámico para el funcionamiento del mecanismo, basado en un modelo no lineal que controla el paso de posición de postración a la posición bípeda, con un mínimo grado de error en condiciones de simulación, comprobando el adecuado funcionamiento del sistema mecatrónico. En este mismo sentido, Ahmed y otros,20 desarrollaron un modelo cinemático, el cual asegura que la incorporación de segmentos del tronco y cuello se haga de una manera más rápida y sencilla.
Con respecto al funcionamiento de los brazos telescópicos, los errores en el ángulo de desplazamiento pueden causar lesiones al paciente.21
La consideración de las características antropométricas por el equipo favorece la masificación de su uso, ya que se pude ajustar a un mayor número de personas.22
Los resultados encontrados coinciden con los reportados por Lajeunesse y otros,23 quienes señalan que una de las ventajas de los equipos mecatrónicos para mejorar la movilidad de pacientes con paraplejia es la seguridad que brinda el equipo.
Los resultados demuestran que el uso del bipedestador es promisorio para ser usado en hogares de cuidados y rehabilitación con personas con paraplejia, lo cual resultaría en un notable mejoramiento de la calidad de vida de los pacientes en términos de reducir la morbilidad, las infecciones respiratorias, los problemas de presión arterial y los dermatológicos, causados por el tiempo de postración. Por otro lado, al desarrollarse con tecnologías locales, se reducen los costos de fabricación, lo cual permitiría la masificación del equipo a gran escala.
El bipedestador cumple con las condiciones requeridas para realizar la transición a condición bípeda de una persona que padezca paraplejia, cumpliendo con las medidas de seguridad en las partes críticas (pies, rodillas y cadera), garantiza la estabilidad del usuario y posee mecanismos sencillos de operatividad.
Los mecanismos reajustables del bipedestador, tanto para la parte del abdomen como para las rodillas del usuario, se ajustan al rango de medidas antropométricas estipuladas. Sin embargo, el bipedestador se adapta mejor a las personas que se encuentran con una altura más cercana al valor máximo, lo cual significa una mayor comodidad al momento de usar la máquina, con lo cual se amplía el espectro de usuarios.
La mayoría de los usuarios presentaron con el sistema mecatrónico diseñado algún grado de satisfacción en términos de tamaño, transportabilidad, facilidad de uso, seguridad, estética y comodidad, lo cual facilita la masificación del uso del equipo entre las personas con paraplejia. El bipedestador, por tanto, mejora la calidad de vida de los pacientes y reduce las afecciones médicas y la morbilidad asociadas a la condición de paraplejia.

