










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista Cubana de Informática Médica
versión On-line ISSN 1684-1859
RCIM vol.9 no.1 Ciudad de la Habana ene.-jun. 2017
ARTÍCULO ORIGINAL
Alineación Estática de Prótesis a través de Variables Cinéticas y Métodos de Aprendizaje de Máquina
Static Alignment of Prosthetics using Kinetic Variables and Machine Learning Methods
Lely Adriana Luengas Contreras,I Giovanni Sánchez Prieto,II Pedro Raúl Vizcaya GuarínIII
I Doctora en Ingeniería. Docente Investigadora, Facultad Tecnológica, Universidad Distrital Francisco José de Caldas, Bogotá, Colombia. Cra 56 No. 152-77, Bogotá, Colombia. 57+3184791611. laluengasc@udistrital.edu.co
II Especialista en Pedagogía Universitaria. Docente Facultad de Ingeniería, Universidad de San Buenaventura, Bogotá, Colombia. Carrera 8H # 172 -20, Bogotá, Colombia. 571+6671090. giosanpri@gmail.com
III Doctor en Ingeniería. Docente Facultad de Ingeniería, Pontificia Universidad Javeriana, Bogotá, Colombia. Carrera 7 # 40, Bogotá, Colombia. 571+3239300. lelyluco@gmail.com
RESUMEN
El proceso complejo de la alineación en las prótesis y la no existencia de un modelo predictivo para alineación estática de prótesis transtibiales es el foco de esta investigación.Objetivo: Obtener un modelo computacional que permita establecer la existencia de la alineación estática de prótesis transtibiales a través de parámetros cinéticos presentes en amputados transtibiales unilaterales. Métodos: Se realizó la construcción de una base de datos de valores de Centro de Presión (COP) y distribución de presión plantar en amputados medidos en el Servicio de Amputados y Prótesis del Hospital Militar Central, Bogotá, Colombia. Los datos incluyen valores cinéticos medidos con la prótesis en alineación y en desalineación. Resultados: Se desarrollaron tres modelos computacionales, una red neuronal, una máquina de soporte vectorial y un árbol de decisión, se realizó la comparación del desempeño de los modelos. Conclusiones: Los modelos que hacen uso de máquinas de soporte vectorial y de árboles de decisión tuvieron mayor desempeño que la red neuronal. De esta forma, se comprueba que la alineación estática se puede llevar a cabo de forma objetiva empleando recursos tecnológicos.
Palabras clave: alineación de prótesis, rehabilitación médica, modelo de simulación.
ABSTRACT
The complex process of alignment in prosthesis and the non-existence of a model for static alignment of transtibial prostheses is the focus of this research. Objective: Obtain a computational model to establish the existence of the static alignment of transtibial prostheses through kinetic parameters present in unilateral transtibial amputees. Methods: In the Amputee and Prosthetic Service of the Central Military Hospital, Bogotá, Colombia, the construction of a data base of Pressure Center (COP) and distribution of plantar pressure in amputees was carried out. The data include kinetic values measured with the prosthesis in alignment and misalignment. Results: Three computational models were developed, a neural network, vector support machines and decision trees, the performance of the models was compared. Conclusions: Models that make use of vector support machines and decision trees had higher performance than the neural network. In this way, it is verified that the static alignment can be carried out objectively using technological resources.
Keywords: prosthetics alignment, medical rehabilitation, simulation model.
INTRODUCCIÓN
La iniciativa civil que ofrece una visión global de la situación de las minas terrestres, Landmine Monitor, muestra que Colombia es uno de los países donde se presenta mayor cantidad de personas víctimas de minas antipersonas al año,1 ocupando el segundo lugar en el mundo con más de once mil víctimas actualmente.2,3 Del total de víctimas, cerca de dos mil perdieron la vida y los restantes sufrieron heridas que en algunos casos ocasionaron la amputación de extremidades inferiores,2 siendo la amputación transtibial la más común. En el caso de un amputado unilateral, el individuo llega a tener una estructura asimétrica, con alteración en la sensibilidad y pérdida de musculatura en el lado amputado.4
El método de rehabilitación más utilizado es la prótesis. Un sujeto amputado que adquiere una prótesis necesita de la adaptación protésica donde se realizan procedimientos y procesos para ajuste entre el cuerpo y la prótesis de acuerdo a las características del sujeto. La alineación de prótesis se encarga del ajuste y se define como la relación espacial entre los diferentes componentes de la prótesis y el paciente. Con la alineación se busca proveer estabilidad, confort y un patrón de marcha cercano al mostrado por los no amputados,5 así como incidir positivamente en la distribución de peso que se transfiere entre el miembro residual y la tierra, además sirve para equilibrar las fuerzas y los momentos que actúan sobre las articulaciones y los segmentos residuales del miembro inferior, y ayuda a la correcta posición de los segmentos óseos principalmente del segmento corporal inferior; esto se ha reconocido durante décadas.5-16 Existen dos mediciones básicas para conocer la alineación de la prótesis estática: la distribución de presión plantar y la posición de la vertical gravitatoria, que va ligada con el Centro de Presión COP.6-7
A pesar de que se han realizado investigaciones clínicas sobre la alineación de prótesis5,6,8,9,13,17,18 y de que la alineación estática es primordial para alcanzar una adaptación exitosa, se tiene un bajo número de estudios que se enfocan en ella (19), adicional no se tiene un modelo predictivo que permita pronosticar la existencia de este tipo de alineación en prótesis transtibiales. Por lo anterior, se propuso realizar un estudio de investigación donde en una primera etapa de medición y análisis se involucra la ubicación del COP y la distribución de presión plantar con diferentes alineaciones, para así obtener una base de datos de condiciones de alineación estática, se hizo necesario este paso ya que no existen bases de datos de amputados por minas antipersona en Colombia con las mediciones requeridas para la presente investigación; en una segunda etapa, se obtuvieron modelos que muestran si la prótesis se encuentra alineada a partir de los datos cinéticos medidos; y una tercera etapa se calculó el rendimiento de los modelos desarrollados. Esta investigación permite conocer la interacción entre la alineación estática de una prótesis transtibial y los componentes biomecánicos cinéticos presentes en bipedestación estática para una persona amputada transtibial.
Inicialmente se describen tres métodos de clasificación que hacen uso del aprendizaje de máquina, redes neuronales (NN), máquinas de soporte vectorial (SVM) y árboles de decisión. Luego se aborda la metodología utilizada, explicando las características del grupo de sujetos que participaron en el estudio, el protocolo de medición utilizado, los equipos de medición y las técnicas de análisis de los datos. A continuación está el aparte de resultados donde se comentan los hallazgos obtenidos con la investigación. Finalmente las conclusiones derivadas del estudio.
MÉTODOS DE CLASIFICACIÓN
El aprendizaje es una rama de la inteligencia artificial que busca desarrollar programas informáticos basados en algoritmos de aprendizaje que puedan generalizar comportamientos partiendo de información suministrada. Un tipo de aprendizaje es el supervisado, donde se presenta correspondencia entre la salida y las entradas del sistema. Si los datos del sistema son discretos se habla de clasificación, pero si son continuos de regresión.20-22 Los modelos de clasificación se utilizan para asignar elementos o valores (variables dependientes) a un conjunto específico de características (variables independientes).22-23
La extracción de conocimiento es una metodología importante que se debe realizar a la información para localizar los datos relevantes de una aplicación.24-25 Este proceso requiere del pre-procesamiento de datos donde se realiza transformación, limpieza y reducción de datos. La discretización es una técnica de reducción de datos que transforma los datos cuantitativos en datos cualitativos, es decir, atributos numéricos en atributos discretos o nominales con un número finito de intervalos. La teoría de la información permite medir la información para conocer si los datos que se tienen son suficientes para predecir el comportamiento de una variable de interés, pero la teoría de la información sólo trabaja con una resolución finita en los datos, imponiendo límites en los valores de los datos, de allí que se requieren datos de tipo categóricos, donde se reduce el número de datos pero sin que la cantidad de la información se vea afectada.26
Algunas de las técnicas de clasificación son las redes neuronales (NN), los árboles de decisión, las máquinas de soporte vectorial (SVM), entre otras, todas ellas usadas en el ámbito clínico para reconocer patrones.27-29 Estos métodos han demostrado ser potentes herramientas de clasificación y predicción en datos donde la salida es de tipo binaria, de allí que fueron los seleccionados en la investigación que se desarrolló.28-30
MÉTODOS
Para desarrollar un modelo computacional que permita determinar la alineación estática de prótesis transtibiales a partir de datos cinéticos se establecieron las siguientes fases para el desarrollo. En primer lugar, se realizó un estudio de tipo cuantitativo para medir las variables biomecánicas cinéticas de una persona amputada transtibial usuaria de prótesis en bipedestación con alineación y desalineación de la prótesis y así lograr obtener una base de datos; en segundo lugar, se realizaron tres modelos computacionales de alineación; en tercer lugar se comparó el desempeño de los tres modelos.
Recolección y análisis de datos cuantitativos
Ya que no existen bases de datos con la información necesitada se diseñó y realizó un diseño experimental de tipo descriptivo transversal con componente observacional para la medición de variables cinéticas de Centro de Presión (COP) y distribución de presión plantar, se llevó a cabo en el Servicio de Amputados y Prótesis del Hospital Militar Central. Las personas involucradas en el estudio fueron cinco5 pacientes amputados transtibiales debido a trauma por minas antipersonas, todos hombres con amputación transtibial unilateral (edad 34 ± 4.53 años, masa corporal 79 ± 9.35 kg, estatura 171 ± 0.07 cm) con uso adecuado de prótesis por más de un año, con adaptación adecuada. El tipo de prótesis utilizada es con sistema de suspensión por liner y pin, y pie de alta actividad en fibra de carbono. El número de participantes tiene correspondencia con la cantidad de sujetos que ingresan mensualmente al Servicio.
El muestreo utilizado fue por conveniencia, ya que los sujetos son pacientes que consultan el Servicio de Amputados y Prótesis del Hospital Militar Central. El criterio de exclusión de los sujetos fue la presencia de alteraciones musculo esqueléticas o neurológicas en las otras extremidades, alteraciones sensoriales o cognitivas, lesiones en piel, alteraciones en marcha secundarias por dolor, uso de ayudas externas para la marcha, alteraciones articulares en otros segmentos corporales en miembros inferiores.
Las variables usadas en la investigación fueron de identificación (Número de identificación), antropométricas (Edad, Talla, Peso, Tiempo de amputación) y cinéticas (ubicación del COP, distribución de presión, alineación). El instrumento utilizado para la medición del COP y de la distribución de presión plantar fue el sistema Pedar® (Novel, Alemania), tiene ± 2.4 % en precisión de medición, consta de 198 sensores capacitivos (99 en cada plantilla), software y sistema de visualización.31
Para posicionamiento de los pies y control de postura se utilizaron guías 2D siguiendo una posición anatómica de bipedestación.
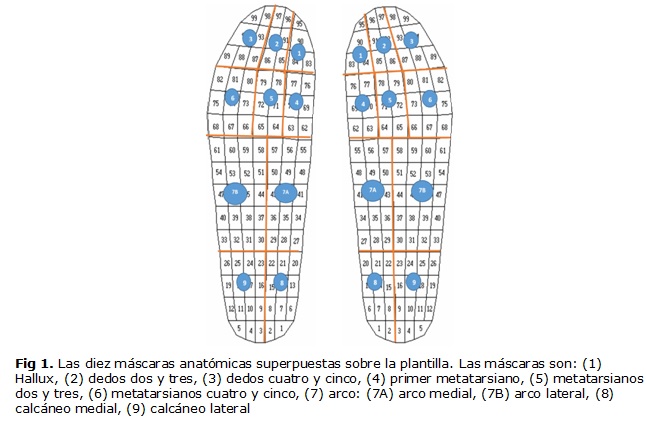
Se obtuvieron 50 mediciones de cada sujeto. Las mediciones de la presión se agruparon en 10 máscaras anatómicas en cada pie,32-33 Figura 1. Se calculó la media y la desviación estándar de los datos medidos. Para verificar la igualdad de los grupos de datos inter-sujetos se realizaron las pruebas estadísticas de Levene,1 también se empleó el test de ANOVA2 con el fin de investigar la variabilidad de la presión plantar entre los pies y entre los sujetos, tanto en alineación como en desalineación.
Se utilizó el principio de teoría de la información (TI) expuesto por Shannon34 para analizar los datos recolectados, porque permite observar las relaciones entre variables y muestra la explicación o predicción del comportamiento de éstas. El análisis de un sistema con TI acepta solo variables finitas, con valores límites, es decir de tipo categóricas, de tal forma que se tengan valores en grupos representativos que llevan la mayor información posible, entonces se realizó un proceso de agrupación utilizando el método de Menor Pérdida de Información (LIL, por sus siglas en inglés) y se midió la confiablidad de las categorías obtenidas. Para establecer la relación existente entre las entradas y las salidas del sistema se analizó la cantidad de información o información mutua I(X:Y) trasmitida a partir los datos disponibles y se construyó la matriz de información mutua. La matriz permitió seleccionar las variables que más información aportan al sistema y con ellas construir los modelos predictivos.
Análisis cualitativo
A partir de los resultados cuantitativos se desarrollaron tres modelos computacionales. Para esto, en primera instancia se realizó la descripción cualitativa del modelo, luego se exploraron herramientas que permitieran desarrollar los mismos, paso seguido se determinó la matriz de datos (variables, parámetros, etc.) a usar en el modelo, se realizaron los modelos y finalmente se verificaron los resultados de acuerdo con los datos reportados por las mediciones, comprobando la bondad o calidad del modelo obtenido.
Desempeño de los modelos
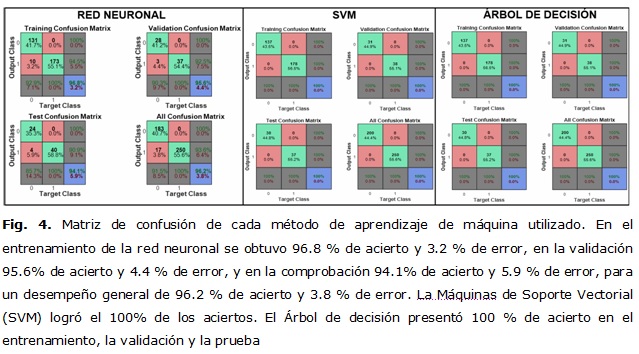
Un instrumento para evaluar la exactitud de una clasificación es la matriz de confusión, también llamada matriz de error o de contingencia. Permite comparar en una tabla la predicción dada por el modelo contra los datos experimentales. Se obtuvo una matriz de confusión de cada modelo, para los datos de entrenamiento, de validación y de prueba, y para el conjunto de datos en general. Los resultados obtenidos con estas matrices se utilizaron para calcular la sensibilidad, la especificidad y la precisión. Definida la sensibilidad como la fracción de verdaderos positivos (capacidad del algoritmo para detectar la desalineación en prótesis desalineadas), la especificidad es la fracción de verdaderos negativos (capacidad del algoritmo para detectar la ausencia de la desalineación en prótesis alineadas) y el índice de precisión es el valor predictivo positivo, es decir la proporción del número total de predicciones que son correctas respecto al total.29
RESULTADOS
Análisis estadístico
Los datos medidos se resumen en la Tabla 1. La prueba de Levene entregó un valor significativo superior a cero (0,3256, p<0.05), mostrando que los datos entre los sujetos son homogéneos y no presentan diferencia ni de medias ni de varianzas. El resultado del análisis estadístico empleando ANOVA para establecer si la distribución de presión y el COP entre los sujetos es similar fue cercano a uno (0,869, p<0.05). La comparación entre el lado contralateral y el ipsilateral empleando ANOVA fue cercano a cero (0,027, p<0.05), entonces se rechaza la hipótesis de igualdad de medias, los lados se comportan de forma diferente. La variabilidad de la presión en las diferentes regiones del pie analizada con ANOVA, muestra que la distribución de la presión en el pie fue significativamente diferente entre máscaras para el lado ipsilateral y el lado contralateral (0,00, p <0,001).
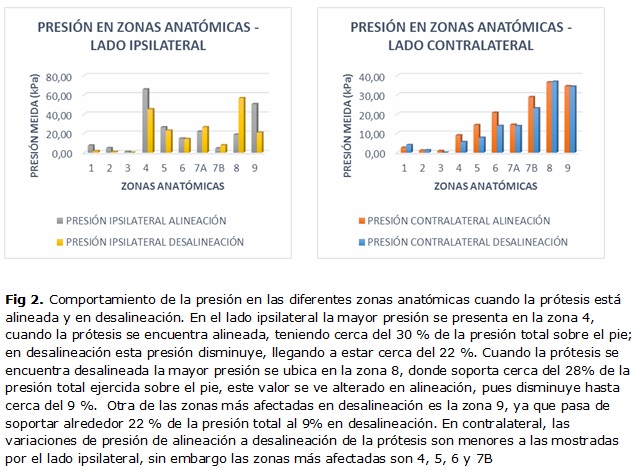
El análisis del comportamiento de la presión en las zonas anatómicas definidas con la prótesis en alineación y en desalineación se muestra en la Figura 2. El Centro de Presión (COP) se ve alterado al variar la alineación de la prótesis, Figura 3.
Tratamiento de los datos
El análisis de las variables se hizo con la teoría de la información, para ello se realizó la transformación de las variables numéricas a categóricas, se calculó la confianza obteniendo un valor superior al 96 %, lo cual indica que los valores categóricos obtenidos en la transformación son representativos de la población inicial, Tabla 2.
Con los nuevos datos se realizó la matriz de información mutua para establecer las variables de entrada de mayor impacto en la variable de salida, lo que permitió reducir de 24 variables de entrada a 16 variables y se asegura que las variables empleadas en el modelo construido sean representativas de las variables incluidas en el experimento.25
La validación cruzada permitió evaluar el rendimiento de los algoritmos desarrollados.23-25 Se utilizó la función cvpartition de MATLAB® para crear una partición de validación cruzada de forma aleatoria de los datos. Los modelos se entrenaron con el 70 % de los datos conseguidos en las mediciones, se validó con el 15 % de los datos y se comprobó su funcionamiento con el 15 % restante. Obteniendo un subconjunto de entrenamiento de 315 datos, uno de validación de 68 datos y uno de prueba de 68 datos.
Red Neuronal
Se diseñó una red feed-forward empleando retro-propagación como forma de entrenamiento supervisado, con dos capas, la primera de ellas tiene 10 neuronas y la capa de salida una, con 16 entradas y una salida. Se emplearon 20 iteraciones para realizar el modelo, el tiempo empleado en la programación fue menor a 1s, en la matriz de confusión se observa el desempeño de la red, Figura 4.
Máquina de soporte vectorial (SVM)
Se empleó un kernel gaussiano ya que los datos no son linealmente separables y este es reconocido por sus bondades de estabilidad, cumple las restricciones de no negatividad y es altamente recomendado en aplicaciones de predicción. Para el entrenamiento, validación y prueba de la SVM se utilizaron los mismos subconjuntos de datos empleados en la Red Neuronal. Los resultados del desempeño se muestran en la Figura 4.
Árboles de decisión
Se utilizó un árbol de decisión tipo C4.5 porque aprende funciones de valores discretos y admite ejemplos con ruido. Los subconjuntos utilizados para entrenamiento, validación y prueba son los mismos que se emplearon en los dos métodos de aprendizaje de máquina explicados. El desempeño se observa en la Figura 4.
Para comparar el desempeño de los tres métodos de aprendizaje utilizados se calcularon los estimados de sensibilidad, especificidad y precisión, a partir de las matrices de confusión halladas,en la Tabla 3.
Aplicación
Se desarrolló una aplicación en MATLAB®, Figura 5, donde se indica si la prótesis se encuentra alineada. La aplicación contiene cuatro pestañas, "INICIO" muestra la presentación de la aplicación. "IDENTIFICACIÓN" permite ingresar los datos de identificación de sujeto, Tipo de Identificación, Número de Identificación, Nombre, Edad, Fecha de Nacimiento. "DATOS ANTROPOMÉTRICOS" admite datos del sujeto con respecto a la amputación sufrida, causa de amputación, lado amputado, tiempo de amputación; adicional, se digitan datos de talla y peso del sujeto. En "DATOS CINÉTICOS" se cargan los datos de los parámetros cinéticos de COP y Presión Plantar. El estimado de la media de estos datos se muestra en una tabla. "CALCULAR ALINEACIÓN" indica si la prótesis está o no alineada. "EXPORTAR" permite exportar en un archivo de extensión .pdf los datos del sujeto, los mostrados en la tabla y el resultado de la alineación.
DISCUSIÓN
Se logró la construcción de una base de datos que involucra parámetros cinéticos y antropométricos de sujetos amputados transtibiales unilaterales por mina antipersona y usuarios de prótesis.
El análisis estadístico reporta baja variación entre los sujetos, comprobado lo hallado en estudios anteriores,8,35,36 pero muestra alta variación en la comparación entre los pies y alta variación al comparar las diferentes zonas de presión. Los datos de los sujetos son homogéneos y no presentan diferencia ni de medias ni de varianzas.
La afectación de la alineación de la prótesis sobre el COP y la distribución de presión plantar es evidente, concuerda con lo reportado por Pinzur et al5 y Zahedi et al6. El COP se desplaza al variar la alineación, se afecta en mayor medida contralateral. En ipsilateral las zonas anatómicas de presión más afectadas al variar la alineación son 4, 8 y 9. En contralateral las zonas más afectadas son 4, 5, 6 y 7B.
El análisis de relación entre variables se realizó con la teoría de la información, para ello los datos se discretizaron con la técnica de Menor Pérdida de Información (LIL, por sus siglas en inglés) obteniendo reducción los números de datos distintos en cada variable. La confiablidad de las categorías obtenidas fue superior al 96 %, lo cual indica que se tiene excelente representatividad de los valores numéricos iniciales. Los datos discretizados se utilizaron para calcular la información transmitida y seleccionar las variables que aportan mayor cantidad de información en el sistema. Las variables seleccionadas fueron 16, con información transmitida superior a 39 %.
Las técnicas de aprendizaje de máquina permitieron desarrollar tres modelos predictivos, una red neuronal, una máquina de soporte vectorial (SVM) con kernel gaussiano y un árbol de decisión C4.5. Después de validar las técnicas anteriormente mencionadas con los mismos datos, la SVM y el árbol de decisión presentaron un error del 0 %, el menor desempeño lo mostró la red neuronal, con un error de cerca del 5 %, lo que permite deducir que es la técnica menos precisa. Cabe resaltar que la técnica de red neuronal ofrece resultados aceptables; sin embargo, no se encuentra al nivel de los resultados obtenidos por las máquinas de soporte vectorial (SVM) y el árbol de decisión. Los resultados de la simulación revelan la eficacia y la conveniencia del uso de técnicas de aprendizaje de máquina para la predicción de la alineación estática de prótesis transtibiales a partir de datos cinéticos presentados por los pacientes.
Por lo anterior, los modelos de detección de alineación estática de prótesis propuestos en este trabajo pueden beneficiar en gran medida a la población amputada y al sector de la salud que se enfoca en el área de prótesis, ya que se puede desarrollar todo un sistema que permita la alineación objetiva de la prótesis.
La selección de variables con el uso de la teoría de la información permitió obtener modelos más precisos, ya que inicialmente se emplearon los datos recopilados en las mediciones sin realizar tratamiento de la información. La red neuronal desarrollada con este conjunto de datos tuvo un error superior al 50 %, el error en la SVM fue cercano al 40 % y en el árbol de decisión cerca de 35 %.
El trabajo futuro se centrará en el desarrollo de modelos de alineación dinámica con el fin de abordar las fases de alineación que involucran al sujeto usuario, para así construir un modelo general de alineación de prótesis. A partir del modelo se propondrá todo un sistema de alineación.
REFERENCIAS BIBLIOGRÁFICAS
1. Landmine and Cluster Munition Monitor. Colombia Casualties and Victim Assistance [página Web en Internet]. Landmine and Cluster Munition Monitor 2014. [Consultado: 1 agosto 2015]. Disponible en: http://www.the-monitor.org/en-gb/reports/2014/colombia/casualties-and-victim-assistance.aspx
2. Dirección Contra Minas. Víctimas de Minas Antipersonal [página Web en Internet]. Dirección Contra Minas 2014: [aproximadamente 8 pantallas]. [Consultado: 3 octubre 2014]. Disponible en: http://www.accioncontraminas.gov.co/estadisticas/Paginas/victimas-minas-antipersonal.aspx
3. Barona CM, Calvo SF, Roa D, González B. Colombia y las Minas Antipersonal [página Web en Internet]. UNICEF 2000: [aproximadamente 53 pantallas]. [Consultado: 28 noviembre 2015]. Disponible en : http://www.unicef.org/colombia/pdf/minas.pdf
4. Tokuno CD, Sanderson DJ, Inglis JT, Chua R. Postural and movement adaptations by individuals with a unilateral below-knee amputation during gait initiation. Gait Posture 2003 Dec;18(3):158–169.
5. Pinzur MS, Cox W, Kaiser J, Morris T, Patwardhan A, Vrbos L. The effect of prosthetic alignment on relative limb loading in persons with trans-tibial amputation: a preliminary report. J Rehabil Res Dev 1995;32(4):373–378.
6. Zahedi MS, Spence WD, Solomonidis SE, Paul JP. Alignment of lower-limb prostheses. J Rehabil Res Dev 1986 Apr;23(2):2–19.
7. Boone D, Kobayashi T, Chou TG, Arabian AK, Coleman KL, Orendurff MS, et al. Influence of malalignment on socket reaction moments during gait in amputees with transtibial prostheses. Gait Posture Elsevier B.V 2012 Nov 20;37(4):620–626.
8. Nederhand MJ, Van Asseldonk EHF, Der Kooij H Van, Rietman HS. Dynamic Balance Control (DBC) in lower leg amputee subjects; Contribution of the regulatory activity of the prosthesis side. Clin Biomech. 2012;27(1):40–45.
9. Gauthier-Gagnon C, Gravel D, St-Amand H, Murie C, Goyette M. Changes in ground reaction forces during prosthetic training of people with transfemoral amputations: A pilot study. J Prosthetics Orthot 2000;4–9.
10. Murphy E. The fitting of below knee prostheses. En: Klopsteg PE, Wilson PD, editors. Human limbs and their substitutes. NewYork: McGraw-Hill, 1954:693–702.
11. Fernie G. Biomechanics of Gait and Prosthetic Alignment. En: Kostuik JP, Gillespie R, editores. Amputation surgery and rehabilitation: The Toronto experience. New York: Churchill Livingstone, 1981: 259–265.
12. Hannah RE, Morrison JB, Chapman AE. Prostheses alignment: effect on gait of persons with below-knee amputations. Arch Phys Med Rehabil. 1984;65(4):159–162.
13. Mizrahi J, Susak Z, Seliktar R, Najenson T. Alignment procedure for the optimal fitting of lower limb prostheses. J Biomed Eng. 1986;8(3):229–234.
14. James W V. Principles of limb fitting and prostheses. Annals of the Royal College of Surgeons of England; 1991;73(3):158–162.
15. Chaudhry H, Findley T, Quigley KS, Bukiet B, Ji Z, Sims T, et al. Measures of postural stability. J Rehabil Res Dev. 2004;41(5):713–720.
16. Kapp S, Cummings D. Transtibial Amputation Prosthetic Management. En: Smith DG, Bowker HK, Michael JW, editores. Atlas of Limb Prosthetics: Surgical, Prosthetic, and Rehabilitation Principles. 2nd ed. American Academy of Orthopedic Surgeons. St Louis:Mosby 1992:453-478.
17. Kobayashi T, Orendurff MS, Zhang M, Boone D. Effect of transtibial prosthesis alignment changes on out-of-plane socket reaction moments during walking in amputees. J Biomech, 2012 Oct 11;45(15):2603–2609.
18. Chaudhry H, Bukiet B, Ji Z, Findley T. Measurement of balance in computer posturography: Comparison of methods-A brief review. J Bodyw Mov Ther. 2011;15(1):82–91.
19. Tibarewala DN, Ganguli S. Static weight-bearing patterns of below-knee amputees using patellar-tendon-bearing prostheses. J Biomed Eng. 1982;4(1):55–61.
20. Domingos P. A few useful things to know about machine learning. Commun ACM. 2012;55(10):78-88.
21. Araujo B. Aprendizaje Automático: Conceptos Básicos y Avanzados: Aspectos Prácticos utilizando el software Weka. Mexico: PRENTICE-HALL, 2006.
22. Bishop CM. Pattern Recognition and Machine Learning. Vol. 4. Singapur: Springer, 2006.
23. Alpaydın E. Introduction to machine learning. 2 ed. Cambridge: MIT, 2014.
24. Pyle D. Business Modeling and Data Mining. San Francisco: Morgan Kaufmann Publishers, Elsevier, 2003.
25. Pyle D. Data preparation for data mining. San Francisco: Morgan Kaufmann Publishers, Inc, 1999.
26. Ferreyra M. Data Mining basado en Teoría de la Información [Página Web en Internet]. Powerhouse; 2007: [aproximadamente 26 pantallas].[Consultado: 20 agosto 2015]. Disponible en: http://powerhousedm.blogspot.com/
27. Amato F, López A, Peña-Méndez EM, Vaňhara P, Hampl A, Havel J. Artificial neural networks in medical diagnosis. J Appl Biomed 2013;11:47–58.
28. Schöllhorn WI. Applications of artificial neural nets in clinical biomechanics. Clin Biomech. 2004;19(9):876–898.
29. De la Hoz Manotas AK, Martínez-Palacio UJ, Mendoza-Palechor FE. Técnicas de ML en medicina cardiovascular. Memorias 2013;11(20):41–46.
30. Huang C-J, Wang Y-W, Huang T-H, Lin C-F, Li C-Y, Chen H-M, et al. Applications of machine learning techniques to a sensor-network-based prosthesis training system. Appl Soft Comput 2011 Apr;11(3):3229–3237.
31. Novel.de. The pedar® system [Página Web en Internet]. Novel.de. [aproximadamente 8 pantallas][Consultado: 11 mayo 2014]. Disponible en: http://www.novel.de/novelcontent/pedar
32. Kimmeskamp S, Hennig EM. Heel to toe motion characteristics in Parkinson patients during free walking. Clin Biomech 2001;16(9):806–812.
33. Kellis E. Plantar pressure distribution during barefoot standing, walking and landing in preschool boys. Gait Posture. 2001;14:92–97.
34. Shannon CE. A mathematical theory of communication. Bell Syst Tech J 1948 July 27:379–423.
35. Clark L, Zernicke RF. Balance in lower limb child amputees. Prosthet Orthot Int. 1981 Apr;5(1):11–18.
36. Luengas LA, Gutierrez MA, Camargo E. Estudio de fuerzas en la bipedestación estática. Visión Electrónica. 2014;8(2):75-79.
Recibido: 22 de noviembre de 2016.
Aprobado: 12 de marzo de 2017.
[1] La prueba de Levene es una prueba estadística inferencial utilizada para evaluar homogeneidad de las varianzas para una variable calculada para dos o más grupos.
[2] El análisis de varianza (ANOVA por sus siglas en inglés) permite comparar varios grupos en una variable cuantitativa, prueba la hipótesis de que las medias de dos o más poblaciones son iguales.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}