










My SciELO
 Custom services
Custom servicesServices on Demand
Journal

Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO
Related links
-
 Similars in
SciELO
Similars in
SciELO
Share

 Permalink
PermalinkIngeniería Energética
On-line version ISSN 1815-5901
Energética vol.36 no.1 La Habana Jan.-Apr. 2015
APLICACIONES INDUSTRIALES
Ajuste de Estabilizadores de Potencia en generadores utilizando el paquete Power Systems Analysis Toolbox PSAT
Setting of Power System Stabilizers based in PSAT free package calculations
DrC. Antonio A. Martínez García, Dr.C. Miriam Vilaragut Llanes, Dr.C. Orlys E. Torres Breffe, MSc. Maykop Pérez Martínez
Centro de Investigaciones y Pruebas Electroenergéticas, CIPEL. Instituto Superior Politécnico José Antonio Echeverría, Cujae, La Habana, Cuba.
RESUMEN
La regulación de la tensión es el modo más elemental de control de los Sistemas Eléctricos de Potencia que mejora la estabilidad y la estabilidad transitoria. La introducción de reguladores de tensión muy rápidos facilita la capacidad del sistema de generar acciones que conserven su estabilidad (incremento del torque sincronizante). No obstante, estos dispositivos disminuyen el amortiguamiento del sistema. La forma más económica de mejorar el amortiguamiento de las oscilaciones mecánicas de las unidades generadoras se logra con la adición de un control suplementario agregado en el sistema de excitación, que se conoce como estabilizador de potencia (PSS, por sus siglas en inglés Power System Stabilizer). En el presente trabajo se utilizan las posibilidades del paquete PSAT para seleccionar la mejor ubicación y ajustar PSS en un sistema longitudinal sencillo de dos áreas, similar al caso del Sistema Eléctrico de la República de Cuba.
Palabras clave: amortiguadores de oscilaciones (POD), estabilidad ante pequeñas perturbaciones, PSAT, PSS.
ABSTRACT
Normally, voltage regulation is the primary mode of control, which improves voltage and transient stability. The introduction of generator´s fast voltage regulators improves Electrical Power Systems ability to generate synchronizing torque to maintain stability. These control devices have a negative effect in damping system oscillations. Supplementary control in generator's voltage regulators (PSS) is the most economic solution to improve system damping. This supplementary control is obtained using power system dampers. PSAT abilities are used in order to obtain setting of this supplementary control in a simple longitudinal two areas system, similar to Cuban Electric Power System.
Key words: power system stabilizers, small signal oscillations, PSAT, PSS.
INTRODUCCIÓN
Los continuos avances de la Ciencia y la Técnica han permitido la introducción de controles cada vez más rápidos y eficientes en los Sistemas Eléctricos de Potencia (SEP). Las excitatrices estáticas con elementos modernos basados en los avances en Electrónica de Potencia hacen mucho más rápidas las respuestas de las unidades generadoras ante condiciones transitorias, mejorando la estabilidad transitoria. Lo mismo sucede con los dispositivos modernos de control de la tensión en SVCs, TCSCs y otros, que, sin embargo, disminuyen el amortiguamiento de los Sistemas Eléctricos de Potencia haciendo los transitorios de recuperación más largos, pudiendo llegar incluso a condiciones de inestabilidad por bajo amortiguamiento cuando se producen pequeñas perturbaciones [1-3].
Es por ello que la tendencia al uso de controles suplementarios, con el objetivo de mejorar el amortiguamiento es una tarea de mucha actualidad. En el presente trabajo se detallan los pasos necesarios para mejorar el amortiguamiento de un sistema longitudinal sencillo con dos áreas de control, mediante el ajuste de sistemas estabilizadores de potencia en las excitatrices de los generadores. Los programas profesionales para cálculos en los SEP (PSAF, EMTP, Matpower, SPS y otros) no cuentan con las herramientas necesarias para efectuar los ajustes de los sistemas estabilizadores de potencia (PSS). En [2], se describe un paquete gráfico de aplicación que trabaja en coordinación con algunos de los paquetes profesionales de cálculos aplicables a los SEP que permite efectuar estos ajustes. En el presente trabajo se efectúan los cálculos necesarios para estos ajustes utilizando las posibilidades del paquete PSAT y del programa profresional MatLab.
UTILIZACIÓN DEL PAQUETE DE PROGRAMAS PSAT PARA EL AJUSTE DE SISTEMAS ESTABILIZADORES DE POTENCIA
Para describir la metodología de ajuste se parte de la red mostrada en el ejemplo 12.6, página 813 de [1, 3], al cual se le adicionan reguladores de velocidad y de tensión en los generadores y un SVC en el nodo 8, cuyos ajustes se relacionan en el Anexo. El monolineal del sistema considerado se muestra en la figura 1. Los resultados del flujo inicial para las condiciones del sistema se relacionan en la tabla 1.

Para este régimen inicial los autovalores correspondientes a los modos mecánicos de oscilación y del SVC del sistema se relacionan en la tabla 2.

En la tabla 2, se puede observar que los autovalores 29-30 son los de menos amortiguamiento y corresponden con un modo mecánico de oscilación entre las dos áreas del sistema lo que puede comprobarse viendo que en la matriz de participación todos los generadores tienen altos valores en este modo de oscilación.
Si se quiere llevar el amortiguamiento de este modo a -0,4 dejando la frecuencia de oscilación alrededor del valor inicial (4,48 rad/s), se hace necesario buscar la ubicación del PSS más favorable para amortiguar las oscilaciones correspondientes al modo inter áreas del sistema.
En [1, 3], se propone un procedimiento de ajuste de PSS en generadores basado en el criterio del mayor coeficiente de participación respecto al modo de oscilación que se desee amortiguar. En este caso, se efectúan los ajustes considerando el generador conectado a un bus infinito a través de la impedancia equivalente del sistema. En [3], se analiza una variante de este procedimiento, considerando dos generadores conectados al bus infinito a través de una línea de transmisión, teniendo en cuenta también una línea de enlace entre ambos generadores, con el objetivo de considerar en los cálculos los modos propios de oscilación del área analizada. En la actualidad son muchos los trabajos relacionados con ajustes de PSS. En lo fundamental, se analizan dos vertientes, los casos de ajustes no centralizados y los ajustes centralizados [4-6], éste último caso aplicado en lo fundamental a sistemas muy grandes con varios modos de oscilación inter áreas de bajo amortiguamiento. El presente trabajo se centra en la primera vertiente y la selección de la mejor ubicación del PSS se efectúa aplicando el método de los residuos [1, 7].
PROCEDIMIENTO PARA EL AJUSTE DE UNA FUNCIÓN TRANSFERENCIAL QUE TIENE UNA RAIZ COMPLEJA CONJUGADA A PARTIR DE LA RESPUESTA A UN ESCALÓN UNITARIO
Si las raíces de una función transferencial son raíces complejas conjugadas p1 = σ + jω y p2 = σ - jω y los residuos correspondientes, también complejos conjugados, se representan por: R1 = a + jb, R2 = a - jb, entonces la función transferencial podrá expresarse como se ve en la ecuación (1):

La respuesta ante un escalón unitario será la anti transformada de la ecuación (2):

Si la ecuación (2) se escribe como una suma de fracciones parciales se llega a la ecuación (3):
Siendo la anti transformada de la ecuación (3), la mostrada en la ecuación (4):
donde: ![]()
En la ecuación (1) a + jb y a - jb son los residuos asociados a las raíces complejas conjugadas p1 y p2. Si se considera que la función transferencial, entre las variaciones de velocidad en el eje del generador y tensión de referencia a la entrada del regulador de tensión, tiene las raíces dominantes numeradas 27, 28, 29, 30, 32 y 33 de la tabla 2, entonces su respuesta ante un escalón unitario se podrá expresar a través de la ecuación (5):

AJUSTES DE PSS APLICANDO EL MÉTODO DE LOS RESIDUOS
El ajuste de los PSS en los generadores puede efectuarse también de manera similar al bloque de amortiguamiento de los SVC visto en [9], pero en este caso es necesario obtener la respuesta de velocidad a la salida de los generadores cuando se varía la tensión de referencia a la entrada del regulador de tensión. Si se parte del sistema con SVC sin red de amortiguamiento, y se pretende elevar el amortiguamiento del modo inter áreas hasta -0.4 para el caso de funcionamiento normal del sistema con dos líneas entre las barras 8-9, y para el caso de que el régimen sea el de post avería después de salida de una de las líneas entre los nodos 8-9, el ajuste del PSS debe de comprobarse para ambas condiciones.
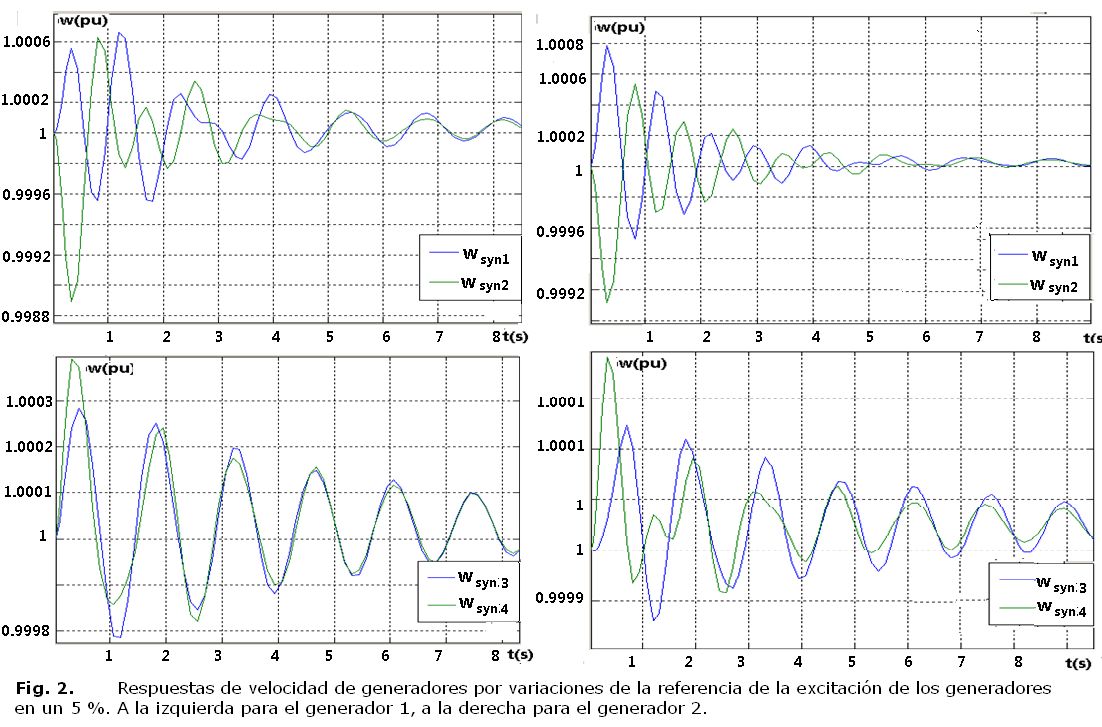
El proceso de ajuste comienza con la determinación de la mejor ubicación del PSS para lo cual se parte de los resultados de un flujo de cargas para condiciones normales del sistema, cuyos resultados se muestran en la tabla 1, para determinar el régimen inicial; con posterioridad se incrementan las tensiones de referencia a la entrada del regulador de tensión de los generadores en un 5 % y luego se hacen corridas en el dominio del tiempo para ver las variaciones de velocidad en las diferentes unidades generadoras, pues la mejor ubicación del PSS corresponderá al generador en que se produzcan las mayores variaciones de velocidad, que es equivalente a decir en el que más residuo tenga cuando se halla la función transferencial a lazo abierto entre la tensión de referencia del regulador y la variación de velocidad en el generador considerado.
Los resultados obtenidos se muestran en la figura 2, mientras que en la figura 3, se presentan las respuestas de velocidad cuando se hace lo mismo pero en la referencia del generador 3. De las figura 2 y figura 3, queda claro que las mayores variaciones de velocidad se producen cuando se varían los niveles de referencia en la excitación de los generadores 1 y 2, debiendo corresponder a éstos la ubicación más eficiente del PSS. Si se calculan las variaciones de velocidad del generador 1 en función del tiempo y se ajustan utilizando la instrucción cftool de MatLab, utilizando como raíces dominantes las indicadas en la tabla 2 como 29, 30, 32, 33, 32 y 33 se obtienen los coeficientes de ajuste de la respuesta en el tiempo señalados como A3, B3, A4, B4, A5 y B5 en la ecuación (5), ver figura 4.
A partir de estos valores se pueden calcular los residuos asociados a cada par conjugado de raíces aplicando las ecuaciones anteriores y se llega a la función transferencial que se busca, no sin antes multiplicar el numerador por 20 pues el escalón no es de 1 pu sino de 0,05 pu. Si la función transferencial se representa por G(s), esta queda como: ver ecuación (6).

La función transferencial evaluada en valores de frecuencia compleja cercana a la ubicación deseada en el plano complejo se muestra en la tabla 3.

PROCEDIMIENTO PARA EL AJUSTE DE LA RED DE RETROALIMENTACIÓN NECESARIA PARA MOVER LA RAIZ CORRESPONDIENTE AL MODO INTER ÁREAS A UNA ZONA DE MAYOR AMORTIGUAMIENTO
La red de retroalimentación necesaria para incrementar el amortiguamiento inter áreas hasta -0.4 mostrada en la figura 5, debe introducir un desfasaje que satisfaga la nueva función transferencial con la retroalimentación [7].

La función transferencial con retroalimentación quedará ahora como se muestra en la ecuación (7):
La condición necesaria para que la nueva raíz satisfaga esta función transferencial será que anule la ecuación característica [1, 8-9], o sea: vea las ecuaciones (8) y (9):
De donde:
De los cálculos anteriores se tiene que la función transferencial evaluada en un entorno a -0.4 ± 4.4855 tiene módulo alrededor de 0,018 y ángulo entre -2,88 y -6,69 grados, según se aprecia en la tabla 3. En este caso la red de retroalimentación debe producir un adelanto entre 3 y 7 grados y la ganancia debe estar alrededor de 45 [1].
El ajuste del PSS, no obstante, no queda terminado con los cálculos efectuados pues debe asegurar también incremento del amortiguamiento del modo inter áreas en el caso en que el sistema se recupere de una falla, así como su comprobación en tiempo real [8, 10], por ejemplo en el caso en que entre los nodos 8-9 solo exista una de las dos líneas de transmisión. Para ello es necesario repetir todos los cálculos a partir de este nuevo régimen inicial. En la tabla 4, se muestran los resultados de los autovalores asociados a los modos de oscilación mecánicos y del SVC de este nuevo régimen. En la figura 6, se muestran los ajustes efectuados para este caso de la respuesta de velocidad en el eje del generador 1 obtenida utilizando cftool de Matlab.
La función transferencial resultante se muestra en la ecuación (10):
En la figura 6, se muestra la respuesta en el tiempo de la función transferencial obtenida para la misma variación del 5 % a la entrada en azul, obsérvese la coincidencia con la obtenida en PSAT.
Evaluando la función objetivo en un entorno de la nueva posición deseada de la raíz dominante se obtienen los resultados mostrados en la tabla 5, los cuales indican que la red de retroalimentación debe introducir adelanto de 9 a 27 grados para el régimen de post avería con una ganancia entre 25 y 30 para el caso de dos líneas entre los nodos 8-9. Como la red es única se parte de diseñar la red de adelanto con alrededor de 9 grados de adelanto y ganancia alrededor de 20. Después de diferentes cálculos iterativos es obtenida la red de adelanto que tiene un comportamiento adecuado para ambas condiciones. Los ajustes resultantes se muestran en la figura 7.


La red obtenida finalmente después de algunas iteraciones introduce un adelanto de 9,52 grados con ganancia de 25 para el régimen normal y 8,72 grados con la misma ganancia para el régimen post avería.
De los resultados que se muestran en la tabla 6, se puede ver que el amortiguamiento del modo inter áreas en ambos casos esta alrededor de -0,4, el amortiguamiento de los modos propios de cada área también mejoran y las frecuencias de oscilación son superiores y en algunos casos prácticamente iguales, lo que indica que se logran regímenes superiores de comportamiento del sistema ante pequeñas oscilaciones.
CONCLUSIONES
1. En el desarrollo del trabajo se presenta la posibilidad de utilizar el paquete PSAT en la determinación de la ubicación más ventajosa y ajustes de sistemas PSS en generadores para aumentar el amortiguamiento del sistema a valores predeterminados.
2. Se utiliza para el ajuste de la función transferencial una sola entrada con una salida (SISO), aunque es posible analizar casos de varias entradas y salidas (MIMO).
3. En el caso del SEP cubano, en el que están definidas claramente dos áreas de oscilación, la aplicación de esta metodología resulta prometedora, ya que elimina la necesidad de adquisición de paquetes específicos de cálculo.
4. Es importante, una vez obtenidos los resultados, verificar para diferentes regímenes el satisfactorio comportamiento del sistema, teniendo en cuenta que éstos no provoquen empeoramiento de los amortiguamientos de otros modos de oscilación.
REFERENCIAS 1. KUNDUR, P., Power System Stability and Control, Mc Graw-Hill Inc., 1994, ISBN: 0-07-035958-X. 2. MARTINS, N.; et al., A Small Signal Stability Program Incorporating Advanced Graphical User Interface. EN: VII SYMPOSIUM OF SPECIALISTS IN ELECTRIC OPERATIONAL AND EXPANSION PLANNING. Brasil: CEPEL, 2000. 3. KUNDUR, P., "Power System Dynamics and Stability". Power System Stability and Control, 3rd Edition, CRC Press., vol.5, 2012, ISBN 978-1-4398-8320-4. 4. DYSKO, A.; et al., "Enhanced Power System Stability by coordinated PSS design". IEEE Transaction on Power System, 2010, vol.25, n.1, p. 413-422, ISSN 0885-8950. 5. SUMINAA, D.; et al., "Parameter Tuning of Power System Stabilizer Using Eigenvalue Sensitivity". Electric Power Systems Research, 2011, vol.81, n.12, p. 2171-2177, ISSN 0378-7796. 6. HASSAN, M.O.; et al., Design and Parameters Optimization of Power System Stabilizer to improve Power System Oscillations. En: The 2nd International Conference on Computer and Automation Engineering (ICCAE), vol. 5, p. 107-111, Sigapore: IEEE, Feb. 2010, E-ISBN: 978-1-4244-5586-7. 7. BEVRANI, H.; et al., "Robust PID Based Power System Stabilizer: Design and Real Time Implementation". Electric Power and Energy Systems, 2011, vol.33, n.2, p. 179-188, ISSN 0142-0615. 8. OGATA, K., Ingeniería de Control Moderna. 5ta edición, PRENTICE-HALL; 2010, ISBN:-13: 978-8-4832-2660-5. 9. VENKATESWARA REDDY, A., et al., Novel Approach for the design of State feedback Power System Stabilizars. En: International Conference on Power System Technology POWERCON, Hangzhou: IEEE, Oct. 2010, p. 1-5, ISBN: 978-1-4244-5938-4. 10. BOSSA, T.H.S.; et al., "A field test to determine PPS effectiveness at Multigenerator Power Plants". IEEE Transaction on Power Systems, 2011, vol. 26, n.3, p. 1522-1533, ISSN 0885-8950.
Recibido: julio de 2014
Aprobado: octubre de 2014
Antonio A. Martínez García. Ingeniero Electricista, Doctor en Ciencias Técnicas, Profesor Titular, Centro de Investigaciones y Pruebas Electroenergéticas, CIPEL. Instituto Superior Politécnico José Antonio Echeverría, Cujae, La Habana, Cuba. e-mail: amg@electrica.cujae.edu.cu


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}