










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería Energética
versión On-line ISSN 1815-5901
Energética vol.36 no.2 La Habana mayo.-ago. 2015
TRABAJO TEORICOEXPERIMENTAL
Planificación Automatizada del Arranque de Generadores para la Restauración de Sistemas Eléctricos de Potencia
Generator Start-Up Automated Planning for Electric Power System Restoration
Msc. Leonel Francisco Aleaga Loaiza I, Dr. Leonel Francisco Aleaga Loaiza II, Dr. Zaid Garcia Sanchez II
I Instituto Tecnológico, Universidad de Atacama, Copiapó, Chile.
II Universidad Central de las Villas, Cuba.
RESUMEN
La elección de la secuencia de arranque de los generadores afecta directamente a la capacidad de generación disponible en el proceso de restauración del sistema de potencia. En este artículo se utiliza un método basado en la planificación automatizada para calcular la secuencia de arranque de las unidades de generación en el proceso de restauración de sistemas eléctricos de potencia. Se presenta una formulación basada en acciones donde se involucran varios factores complejos tales como: la naturaleza combinatoria, el conocimiento de expertos, varias restricciones y condiciones cambiantes en el tiempo que deben cumplirse y la optimización de varios recursos numéricos. Los resultados de prueba sobre el sistema IEEE39-barras muestran que el método es muy eficiente en obtener planes precisos y optimizados para restaurar el sistema de generación utilizando un algoritmo de planificación automatizada basado en la búsqueda heurística con capacidades de razonamiento en tiempo continuo.
Palabras clave: capacidad de generación, lenguaje de descripción de dominios de planificación, PDDL, planificación automatizada, restauración de sistemas eléctricos de potencia, secuencia de arranque de generadores.
ABSTRACT
The choice ofgenerator startupsequenceaffects directly theavailable generation capacityinthe power system restoration process.In this paperan automatedplanning based method is used to calculatethe startup sequence generating units in the electric power system restoration process. Anaction-based formulationis presented where several complex factorsare involved such us: the combinatorialnature, expert knowledge, several restrictions andchanging conditionsover timethat must be metandthe optimization of several numericalresources.Thetest resultson theIEEE39-bus systemshow thatthe method is veryefficientto obtain accurateand optimizedplansto restore the generation systemusing an automated planning algorithmbased onheuristic search with capabilities of reasoning in continuous time.
Key words: automated planning, generation capability, generator Start-Up sequence, planning domain description language, PDDL, power system restoration.
INTRODUCCIÓN
Los apagones de gran extensión causan un gran impacto sobre la sociedad. Una pertinente planificación de las operaciones del sistema eléctrico de potencia (SEP) que se enfoque en minimizar la duración de la restauración minimizaría consecuentemente dichos impactos. La elección de la secuencia de arranque de generadores es una tarea que juega un rol crítico en la capacidad de generación disponible en las distintas etapas del proceso de restauración. La tarea se concentra principalmente en determinar una secuencia ordenada de acciones sobre cada una de las unidades para restablecer el sistema total de generación. Los trabajos publicados más relevantes en el problema abordado en el presente trabajo ofrecen distintas formas de determinar la secuencia de arranque de generadores, en estos se utilizan varios métodos tales como: algoritmo evolutivo inspirado en el quantum [1], optimización por colonia de hormigas [2], programación matemática [3-4], y algoritmos genéticos [5].
El cálculo de la secuencia de arranque de generadores es un problema desafiante que involucra varios factores tales como: la naturaleza combinatoria del problema, el conocimiento de expertos, varias restricciones y condiciones cambiantes en tiempo discreto-continuo que se deben cumplir, la optimización de recursos numéricos discretos-continuos y capturar los detalles del mundo en un nivel de abstracción acorde con el nivel estratégico de tal manera que sea fácil de tratar por los algoritmos de búsqueda para la obtención eficiente de las soluciones. En la restauración de los generadores existen procesos que producen cambios numéricos continuos en la rampa de las unidades. La discretización fija del tiempo utilizada en los métodos tradicionales de programación matemática no es lo suficientemente precisa y puede pasar por alto eventos entre los intervalos de tiempo fijos que podrían comprometer la calidad de los resultados finales. Una actualización precisa de los eventos numéricos a lo largo de la planificación de operaciones de restauración es imprescindible para encontrar una solución con tiempo mínimo (o incluso una solución factible). Por lo tanto, es necesario un método que maneje de manera dinámica, flexible y precisa la naturaleza continua del tiempo para la actualización de la potencia generada. La planificación automatizada es una rama importante de la inteligencia artificial que ofrece técnicas de optimización que han sido aplicadas exitosamente en la industria aeroespacial y robótica. Sin embargo, es notable que estas técnicas escasamente hayan sido aplicadas en problemas de planificación y optimización de operaciones en los SEPs.
En este trabajo se propone un método basado en la planificación automatizada para el cálculo de la secuencia de arranque de generadores para la restauración de sistemas eléctricos de potencia. Los resultados demuestran la eficiencia para obtener planes muy precisos y optimizados de restauración de generadores, con resultados favorables en comparación con los métodos de optimización utilizados hasta la fecha.
FORMULACIÓN DEL PROBLEMA
Uno de los principales objetivos en las etapas iniciales del proceso de restauración de sistemas de potencia es el suministro de la potencia para el arranque de las unidades de no arranque en negro. Esto es clasificado como uno de los problemas primarios en el proceso de restauración [4], el cual puede ser manejado razonablemente por una buena elección en la secuencia de arranque de los generadores.
A. Secuencia de arranque de generadores
La elección de la secuencia de arranque de generadores es una de las tareas más importantes dentro del proceso de restauración de SEPs [1-2]. Las unidades de generación son clasificadas en unidades de arranque en negro (BS por sus siglas en inglés) y unidades de no arranque en negro (NBS por sus siglas en inglés). Una unidad BS (ej., hidráulica o turbina de combustión) puede arrancar por si sola sin necesidad de potencia externa de arranque R. Por otro lado las unidades NBS (ej., turbina de vapor) requieren de una potencia externa R para arrancar. El objetivo principal en la secuencia de arranque de generadores es suministrar la potencia activa Ra las estaciones de servicios auxiliares de todas las unidades NBS tan pronto como sea posible. Esta potencia R principalmente se utiliza en el arranque de los motores necesarios para la puesta en marcha de los servicios de planta de las unidades de generación. Aunque los generadores tienen diferentes características físicas, su comportamiento en el arranque puede ser descrito utilizando un modelo general [3-4], descrito en la figura 1, donde se puede ver que el estado lógico de las unidades puede estar asociado a un intervalo en la línea de tiempo.
Los despachadores en los centros de control bajo una situación de restauración deben ejecutar varias acciones sobre las unidades para cambiar su estado. La ejecución de dichas acciones afecta el valor de la potencia total del sistema. Por ejemplo, en el punto de tiempo tst se ejecuta una acción sobre la unidad para ponerla en el estado de espera, esta al suministrar los requerimientos de potencia R reduce el valor de la potencia total del sistema Psys. Luego de un tiempo de calentamiento Tcp, las unidades en el estado de espera pueden ser puestas en paralelo, pasar al estado arrancada e incrementar continuamente su potencia de salida hasta lograr el estado de plena carga. La pendiente K en la figura 1, es el factor de rampa de toma de carga característico de cada unidad el cual es un gradiente que guía el incremento de la potencia de salida continuamente en función del tiempo.
B. Capacidad de generación del sistema La capacidad de generación del SEP descrita en la ecuación (1), es la suma de las capacidades de generación de todas las unidades menos los requerimientos de potencia de arranque de todas las unidades disponibles en el sistema [3], donde n es el valor total de unidades (BS y NSB) y m es el valor total de unidades NBS.

donde:
Psys(t) : Potencia total del sistema eléctrico de potencia [MW].
Pi(t) : Función de capacidad de generación de la unidad i[MW].
Rj(t) : Función del requerimiento de potencia de la unidad j[MW].
Una vez que las unidades BS o NBS logran el estado arrancada pueden ser capaces de entregar potencia a otras unidades NBS que la necesiten. La función de capacidad de generación Pi(t) de cada unidad en la ecuación (1), puede ser definido en la ecuación (2), la cual no debe exceder sus capacidades máximas de acuerdo con la restricción de la ecuación (3). La función de paso Rj (t) que suministra la potencia de arranque requerida por las unidades en la ecuación (1), se describe en la ecuación (4), la cual no debe superar a la capacidad de generación total del sistema según la restricción en la ecuación (5). La variable qj en la ecuación (4), es una variable decisión binaria muy importante definida en la ecuación (6), utilizada para determinar el punto de tiempo tst en el que se suministra la potencia de arranque a las unidades NBS, “1” significa en espera y “0” significa apagada.

donde:
ci : Variable binaria que determina el estado de una unidad: “1” arrancada, “0” en espera.
Ki : Rampa de toma de carga de la unidad i [MW/h].
Pi(t) : Función de capacidad de generación de la unidad i [MW].
Pmaxi : Potencia máxima de la unidad i [MW].
Psys(t) : Potencia total del sistema eléctrico de potencia [MW].
qj : Variable binaria para el suministro de R a las junidades:“1” en espera, “0” apagada.
Rj(t) : Función del requerimiento de potencia de la unidad j [MW].
tsti : Punto de tiempo de reinicio de la unidad i [min].
T : Tiempo total de restauración del sistema [min].
Tcpi: Tiempo de preparación para el arranque de la unidad i [min].
C. Restricciones de tiempo críticas
En la restauración de sistemas eléctricos de potencia se deben coordinar los siguientes intervalos de tiempo: intervalo máximo crítico e intervalo mínimo crítico [3], según la restricción de la ecuación (7). Por lo tanto, una unidad NBS en el estado apagada solo puede cambiar al estado de espera si es alimentada por otra unidad dentro de la restricción temporal:
donde:
tst : Punto de tiempo de reinicio de la unidad [min].
Tmax : Intervalo máximo crítico o fecha límite para reiniciar la unidad [min].
Tmin : Intervalo mínimo crítico o retraso de tiempo para reiniciar la unidad [min].
MÉTODO DE PLANIFICACION AUTOMATIZADA PROPUESTO
En el presente trabajo se propone un método basado en la planificación automatizada para el arranque de los generadores después de un colapso en el SEP. Aquí se hace uso principalmente de los planificadores de dominio independiente ya que estos han experimentado en los últimos años un mejoramiento significante en el nivel de razonamiento y desempeño. Normalmente los planificadores requieren de la entrada de dos archivos denominados dominio y problema de planificación codificados en el lenguaje de descripción de dominios de planificación (PDDL por sus siglas en inglés) [6-7]. El planificador haciendo uso del conocimiento operacional (modelo dinámico) en el dominio intenta resolver un problema (modelo estático) particular dado. El lenguaje PDDL brinda una forma intuitiva, compacta y eficiente de formular matemáticamente los problemas de planificación y optimización de operaciones en los SEPs. A. Definición del problema de planificación automatizada Los problemas de planificación automatizada se resuelven a través de la búsqueda de una secuencia ordenada de acciones que lleven a un sistema desde un estado inicial a un estado objetivo. Los problemas de planificación temporales puede ser definidos en la 4-tupla <i, A, g, M>, donde i es el estado inicial dentro de un conjunto posible de estados del sistema S|i ∈ S, el cual es definido por una serie de literales L y los valores asignados a un conjunto de variables numéricas z, A es el conjunto de acciones definidas en el dominio de planificación en donde cada acción a | a ∈ A, se representa en la 4-tupla
Los problemas de planificación temporal pueden ser formulados utilizando el lenguaje estándar PDDL haciendo uso de una colección de acciones Apara la manipulación de una colección de proposiciones L y un vector de variables numéricas z. Cada acción A tiene una duración en la forma de restricciones numéricas lineales aplicadas sobre una variable especial. Una acción a ∈ A puede ser aplicada a un estado s∈S si cumple sus precondiciones (Lpre, Fpre). La acción una vez que es ejecutada cambia el estado s con sus efectos (Leff,Feff). Una precondición es una conjunción de cero o más condiciones que pueden ser una proposición simple p∈Lpre o una restricción numérica r∈Fpre sobre z, donde r es lineal en la forma de b.z{>,=,<,=,=}k, donde b es un vector de constantes y k es una constante. Las acciones durativas Atienen precondiciones: pre˫ A, pre↔ A, pre̘ A, que representan las condiciones que deben cumplirse al inicio, durante el curso de su ejecución y al final de la acción respectivamente. Los efectos instantáneos son desarrollados al inicio (Leff˫, Feff˫) o al final (Leff̘ , Feff̘) de la acción, donde los efectos numéricos Feff son lineales en la forma de z{+=,-=,=}b.z + k, donde z∈z. Las acciones durativas pueden contener una combinación de efectos numéricos continuos Feff↔ , en la forma dz/dt=k , k∈ℜ , para actualizar los valores de las variables numéricas z continuamente en función del tiempo t [8].
B. Descripción del dominio de planificación
En esta sección se describe el diseño del dominio en PDDL dela secuencia de arranque de generadores para la restauración de sistemas de potencia. En el dominio se especificaron los requerimientos de razonamiento que el algoritmo debe cumplir, los tipos de objetos (generadores) involucrados, las variables (funciones) numéricas y las acciones requeridas para transformar el estado inicial de todos los generadores al estado objetivo deseado. El dominio de planificación es el conocimiento operacional que guía la búsqueda para determinar una secuencia de acciones del arranque de las unidades. En la tabla 1, se describe la lista de las acciones utilizadas en la construcción del dominio. Estas acciones al ser codificadas en el lenguaje estándar PDDL pueden ser en teoría manejadas por cualquier sistema de planificación de dominio independiente que soporte los requerimientos de razonamiento especificados.
En el presente trabajo, la formulación del modelo general descrito en las ecuaciones (1, 2, 3, 4, 5, 6 y 7), se realizó de la siguiente forma. La variable de decisión c que representa el cambio de estado de las unidades en la ecuación (2), fue representada como un predicado PDDL cuyo valor de verdad es controlado por los efectos Leff̘ de las acciones a1, a4 y a5 y además es incluido en las precondiciones Lpre˫ de la acción a2 y a6. La ecuación (3), que mantiene los límites de capacidad máxima de las unidades fue representada como una restricción numérica Fpre↔ en las precondiciones de las acciones a2 y a6. El cambio numérico continuo de la variable t que tiene que ver con el proceso de rampa de los generadores descrito en la primera expresión de la ecuación (2), se actualizó con el uso de una variable PDDL especial (#t) en el efecto Leff↔ de las acciones a2 y a6 para simular la función de capacidad de generación de las unidades en la ecuación (1). La función de paso definida en la ecuación (4), es formulada como un cambio numérico discreto incluido en los efectos Fpre̘ las acciones a1 y a3 para modelar el consumo de los requerimientos de potencia de las unidades en la ecuación (1). La variable de decisión q para la alimentación de unidades en la ecuación (6), fue transformada a un predicado que es controlado por los efectos Leff˫ de las acciones a1 y a3. La ecuación (5), fue incorporada como una restricción numérica Fpre˫ incluida en las precondiciones de la acción a3. El valor de retraso de las unidades Tcp en la ecuación (2), se maneja en la variable de duración de las acciones a1 y a4.
El dominio de planificación resultante contiene restricciones temporales fijas definidas en la restricción ecuación (7), en la forma de retrasos y fechas límite que son difíciles de manejar por los algoritmos de planificación actuales. En este trabajo se hace uso de los literales iniciales temporizados (TILs por sus siglas en inglés) del lenguaje PDDL2.2[7] para la definición de las restricciones temporales especificadas a puntos fijos sobre la línea de tiempo. Los TILs son una construcción especial de restricciones temporales que deben ser expresados en el archivo del problema PDDL, estos especifican un tiempo específico donde se debe realizar un efecto de cambio proposicional según la ecuación (8), donde tTIL+ y tTIL- son funciones que definen los puntos fijos sobre la línea de tiempo donde actúan los TILs positivos y negativos respectivamente controlando el valor de verdad de una proposición p como si fueran acciones ficticias.

Entonces, la restricción en la ecuación (7), se maneja con el uso de un predicado pcc aplicado en las precondiciones (Lpre̘ ) de la acción a3 cuyo valor de verdad es alterado en el tiempo por TILs según la ecuación (9). Los valores de y en la ecuación (9), son calculados en las ecuaciones (10) y (11), respectivamente, donde ΩNBS en la ecuación (11), es el conjunto de todas las j unidades NBS. El planificador estará entonces presionado a decidir haciendo uso de q en la ecuación (4), el valor de tiempo tst para alimentar las unidades NBS mientras pcc en la ecuación (9), sea verdadero.


C. Descripción del problema de planificación El problema PDDL de planificación es aquel que el algoritmo de planificación trata de resolver para una situación particular dada en un SEP específico. Este problema se define sobre la base del conocimiento operacional descrito en el dominio PDDL. En los problemas PDDL utilizados en este trabajo se incluyó: el listado de los generadores involucrados, el estado inicial de estos generadores haciendo uso de una lista de literales positivos, un listado de valores numéricos de variables que representan las características físicas de cada uno de los generadores, el estado final (objetivo) que se desea obtener en todas las unidades y la función objetivo de la potencia total del sistema Psys(t) que se desea maximizar.
D. Optimización de los planes calculados La mayoría de los algoritmos de planificación actuales están basados en la búsqueda heurística, por lo tanto no pueden garantizar que las soluciones encontradas sean óptimas. En este trabajo se considera que los planes tienen una mejor calidad si estos maximizan la capacidad de generación total en el período de restauración total T. Esto se puede lograr con la minimización del horizonte de tiempo T total de restauración. Curiosamente el valor de T depende directamente de la secuencia de arranque de generadores escogida y es equivalente al valor máximo de horizonte de tiempo τ encontrado en las unidades NBS (figura 1), según la ecuación (12). Se debe notar que el valor de T no puede ser obtenido de antemano, sino hasta después de tener alguna secuencia de arranque de generadores tentativa calculada.
donde:
τ : Horizonte de tiempo para el arranque de la unidad i [min].
Las soluciones óptimas o cercanas a las óptimas son aquellas que obtienen un valor mínimo de τ en cada una de las unidades NBS. Estas soluciones pueden ser obtenidas a través de una nueva búsqueda dentro una región previamente identificada en un plan tentativo. Para esto se debe hacer un análisis temporal de dicho plan tentativo, el mismo que es calculado previamente por el planificador haciendo uso del mismo dominio y un problema PDDL inicial de planificación. Este problema PDDL inicial contiene una frontera inicial temporal sobre la región de búsqueda, construida por una colección de horizontes tentativos τ' aplicados sobre cada una de las j unidades NBS. Estos horizontes tentativos son especificados en la forma de TILs de acuerdo con la ecuación (13), para controlar el valor de verdad de un predicado ph y aplicado en las precondiciones (Lpre̘) de la acción a6. El horizonte de tiempo tentativo τ' de las unidades NBS descrito en la ecuación (14), se usa para impedir que el algoritmo elija valores de tiempo de ejecución de acciones muy grandes sobre las unidades que no tienen ninguna restricción temporal asignada. Esto ayuda mantener valores no muy grandes del horizonte τ' de las unidades en el plan tentativo.

donde:
K : Rampa de toma de carga de la unidad [MW/h].
Pmax : Potencia máxima de la unidad [MW].
Tcp : Tiempo de preparación para el arranque de la unidad [min].
τ' : Horizonte de tiempo tentativo para el arranque de la unidad i [min].
En este trabajo las soluciones optimizadas se encuentran en una nueva zona de búsqueda delimitada por una nueva frontera temporal delimitada por TILs descritos en la ecuación (15), los cuales controlarán nuevamente el valor de verdad del predicado ph. El valor de τ en la ecuación (15) se determina para las j unidades NBS haciendo el uso del análisis temporal según la ecuación (16), siendo τa4=ta4+Δta4 el horizonte de tiempo de la acción a4, donde Δta6 es el valor de duración de la acción a6 y ta4, Δta4 son los valores del tiempo de inicio y duración de la acción a4 de la tabla 1, respectivamente, las cuales se determinan a través del plan tentativo descrito anteriormente. Este análisis temporal reduce las ventanas de tiempo de inactividad que alargan el proceso de restauración del SEP.

El valor calculado de τ en la ecuación (16) reemplaza el valor de τ' en la ecuación (14), en el problema PDDL inicial y este problema modificado es enviado nuevamente para la búsqueda de una nueva solución. Las soluciones optimizadas son obtenidas entonces por un proceso de re-planificación temporalmente restringida por ph en la ecuación (15), cuyo valor de verdad negativo es controlado directamente en el punto de tiempo τ descrito en la ecuación (16), y ajustado en los valores de los TILs negativos del problema PDDL.
RESULTADOS.
Los resultados descritos a continuación fueron obtenidos utilizando el sistema de planificación POPF [9], puesto que es el único planificador capaz de realizar un razonamiento en tiempo continuo y manejar TILs negativas. Los tiempos de cálculo reportados fueron obtenidos utilizando la estrategia de búsqueda heurística BestFirstSearch en una PC con procesador Intel Core i3-2120 3,30 GHz y 4 GB de RAM bajo SO Linux-Ubuntu v12.04 LTS 32-bit. POPF es un planificador temporal que se basa en la planificación de orden parcial (POP por sus siglas en inglés) que realiza una búsqueda con encadenamiento hacia adelante (F por sus siglas en inglés) y utiliza un algoritmo de programación entera mixta (MIP por sus siglas en inglés) para asegurar el cumplimiento de las restricciones numéricas cuando se involucra la actualización de variables “continuas”.
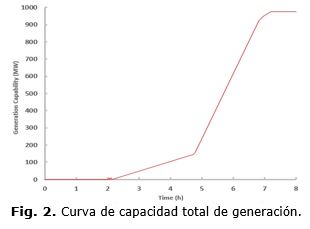
A. Sistema de la Región Oriental de Entergy
Este es un caso real de un apagón ocurrido en Junio del 2005 [3], donde se desconectaron de la red cuatro generadores. Los cuatro generadores estaban listos para el reinicio y sincronización, sin embargo solo había disponibilidad de potencia externa para un solo generador. En [3], se muestran los datos de los generadores que salen de servicio. El plan optimizado de restauración del sistema de generación descrito en la tabla 2, es calculado luego de 0,177 s, un plan tentativo fue obtenido luego de 0,177 s resultando un tiempo computacional total de 0,354 s. La figura 2, muestra la curva de capacidad de generación total del sistema de potencia, el tiempo total de restauración según la ecuación (12) es de 431,58 min (7,193 h) el cual es el valor del horizonte de tiempo τ de la unidad G1.
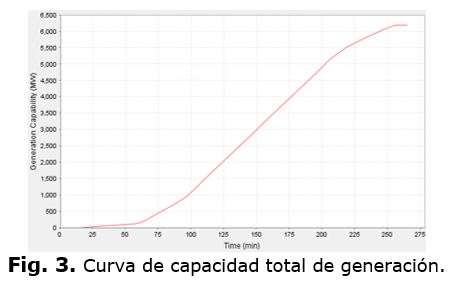
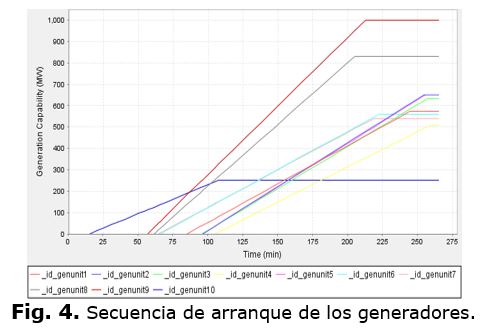
B. Sistema IEEE 39-Barras
En este caso de estudio se hace uso de los datos de los generadores del sistema IEEE 39-Barrasdefinido en [3], para obtener los resultados del cálculo de la secuencia de arranque de los generadores en el proceso de restauración bajo una situación de colapso completo. El sistema de potencia tiene diez generadores donde el generador G10 es BS y los generadores G1 a G9 son NBS. El plan optimizado de restauración del sistema de generación descrito en la tabla 3, es calculado luego de 3,864 s, un plan tentativo fue obtenido luego de 3,858 s resultando un tiempo computacional total de 7,722 s. La figura 3, muestra la curva de capacidad de generación total del sistema de potencia, el tiempo total de restauración según la ecuación (12), es de 258,942 min (4,316 h) el cual es el valor del horizonte de tiempo τ de la unidad G5 y una energía total disponible dentro en este período de 11919,475 MWh. La figura 4, muestra de manera gráfica la secuencia de arranque de los generadores.

El enfoque abordado en este trabajo se diferencia de los anteriormente propuestos en la capacidad de manejar apropiadamente el razonamiento en tiempo continuo para tener un acceso más dinámico y preciso a los cambios numéricos de la potencia generada. Por otro lado, si el problema de la secuencia de arranque de generadores se maneja con un método basado en la programación matemática, se necesitaría aumentar el número de pasos para mejorar la resolución en la línea discreta de tiempo y así capturar más sucesos que puedan cambiar el valor de las variables numéricas. Esto aumentaría el número de intervalos y puntos de tiempo, representando un aumento del tamaño del espacio de soluciones en la búsqueda que afectaría notablemente la complejidad temporal y espacial del algoritmo. Por lo tanto el razonamiento en tiempo continuo adoptado en este trabajo brinda ventajas en eficiencia y calidad en las soluciones, incluso teniendo en cuenta las debilidades para encontrar soluciones óptimas en los algoritmos búsqueda heurística comparadas con las ventajas de los métodos de programación matemática [3], en los cuales se asegura la optimización global de las soluciones. Los resultados numéricos descritos en la tabla 4, demuestran la eficiencia del método propuesto, con soluciones de mejor calidad en comparación con los métodos matemáticos de programación lineal entera mixta (MILP por sus siglas en inglés) tradicionales utilizados en [3], al obtener tiempos restauración del sistema de generación de menor valor. El éxito del presente método se debe principalmente al nivel de compactación de las formulaciones PDDL y a la capacidad de razonar en tiempo continuo para obtener un acceso más dinámico, flexible y preciso a los cambios numéricos de la potencia en cada instante. Esto da al algoritmo una ventaja notable para tomar decisiones más tempranas sobre la ejecución de acciones que están esperando cumplir sus precondiciones numéricas con el recurso de potencia.
CONCLUSIONES
En el presente artículo se propone un método basado en la planificación automatizada para utilizarse en el cálculo de la secuencia de arranque de generadores bajo un estado de restauración del SEP sea total o parcial. Con este método se obtienen planes muy precisos de restauración del sistema de generación. Los resultados demuestran la alta eficiencia del método para obtener soluciones optimizadas a través de un algoritmo de planificación basado en búsqueda heurística. Los resultados obtenidos compiten favorablemente con los métodos de optimización propuestos a hasta la fecha. El enfoque descrito en el presente trabajo puede ser aplicado a otros problemas de planificación y optimización de operaciones existentes en los SEPs.
REFERENCIAS
1. HOU, J.; et al., "Permutation-based power system restoration in smart grid considering load prioritization". Electric Power Components and Systems, 2014, vol.42, n.3-4, p. 361-371, [Consultado: 12 de Enero de 2015], Disponible en: http://www.tandfonline.com/doi/pdf/10.1080/15325008.2013.862326, ISSN 1532-5016.
2. KETABI, A.; Feuillet, R., "Ant colony search algorithm for optimal generators startup during power system restoration". Mathematical Problems in Engineering, 2010, vol. 2010, 11 p., [Consultado: 25 de Julio de 2012], Disponible en: http://www.hindawi.com/journals/mpe/2010/906935/, doi: dx.doi.org/10.1155/2010/906935, ISSN 1563-5147.
3. SUN, W.; et al., "Optimal generator start-up strategy for bulk power system restoration". IEEE Transactions on Power Systems, 2011, vol.26, n.3, p. 1357-1366, [Consultado: 15 de Noviembre de 2011], Disponible en: http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=5648472, ISSN 0885-8950.
4. HOU, Y.; et al., "Computation of milestones for decision support during system restoration". IEEE Transactions on Power Systems, 2011, vol.26, n.3, p.1399-1409, [Consultado: 25 de Noviembre de 2011], Disponible en: http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=5661883, ISSN 0885-8950.
5. CHEN, J.; et al., "Research on optimization for units start during power system restoration". Energy and Power Engineering, 2013, vol.5, n.4, p. 708-712, [Consultado: 17 de Febrero de 2015], Disponible en: http://www.scirp.org/journal/PaperInformation.aspx?PaperID=39119#.VQIDYvmG9Qc, doi: dx.doi.org/10.4236/epe.2013.54B137, ISSN 1947-3818
6. FOX, M.; LONG, D., "PDDL2.1: An extension to PDDL for expressing temporal planning domains". Journal of Artificial Intelligence Research, 2003, vol.20, p. 61-124, [Consultado: 12 de Agosto de 2012], Disponible en: https://www.jair.org/media/1129/live-1129-2132-jair.pdf, ISSN 1076-9757.
7. EDELKAMP, S.; HOFFMANN, J., "PDDL2. 2: The language for the classical part of the 4th international planning competition". En: 4th International Planning Competition (IPC'04), 2004, [Consultado: 21 de Septiembre de 2012], Disponible en: http://www.plg.inf.uc3m.es/ipc2011-deterministic/attachments/Resources/edelkamp-hoffmann-tr-2004.pdf.
8. COLES, A. J.; COLES, A. I., "PDDL+ Planning with events and linear processes". En: Proceedings of the 1st Workshop on Planning in Continuous Domains at the Twenty Third International Conference on Automated Planning and Scheduling (ICAPS-13), 2013, [Consultado: 15 de Diciembre de 2013]. Disponible en: http://www.inf.kcl.ac.uk/staff/amanda/bibfiles/ColesPCDICAPS2013.pdf.
9. COLES, A.J.; et al., "Forward-chaining partial-order planning". En: Proceedings of the Twentieth International Conference on Automated Planning and Scheduling (ICAPS 10), AAAI Press, 2010, [Consultado: 17 de Enero de 2012], Disponible en: https://www.aaai.org/ocs/index.php/ICAPS/ICAPS10/paper/view/1421/1527.
10. IEC. Energy management system application program interface (EMS-API) - Part 301: Common Information Model (CIM) Base. IEC 61970-301:2009, 3 edition, August 2011, Disponible: https://webstore.iec.ch/p-preview/info_iec61970-301%7Bed3.0%7Db.pdf, ISBN: 978-2-88912-669-9.
Recibido: Octubre de 2014
Aprobado: Febrero de 2015
Leonel Francisco Aleaga Loaiza Ingeniero Electromecánico, Master en Telemática.Profesor. Universidad Nacional de Loja, Ecuador. email: faleaga@ieee.org

