










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería Energética
versión On-line ISSN 1815-5901
Energética vol.36 no.3 La Habana set.-dic. 2015
TRABAJO TEORICOEXPERIMENTAL
Planificación automatizada de rutas de transmisión en la restauración de sistemas eléctricos de potencia
Transmission Path Automated Planning in Electric Power System Restoration
Ing. Leonel Francisco Aleaga Loaiza1, Dr. C. Zaid García Sánchez2, Dr. C. Carlos Morell Pérez2, Ing. Omar Arturo García Zamora2, Ing. Eniel Rodríguez Machado2
1Universidad Nacional de Loja, Ecuador.
2Universidad Central de las Villas, Cuba.
RESUMEN
La planificación de la restauración es una tarea muy importante en la operación de sistemas eléctricos de potencia. Un plan que reduzca la duración de la restauración, minimiza los impactos de los apagones en la economía y la sociedad.En este artículo se presenta un nuevo método basado en la planificación automática (PA) para restaurar la red de transmisión después de un colapso. En las primeras etapas de la restauración del sistema eléctrico de potencia es importante coordinar simultáneamente la secuencia de arranque de generadores (SAG) con la secuencia de energización de ramales (SER) para disminuir la duración de la restauración. Las formulaciones presentadas en este artículo se basan en acciones de PA, las cuales se concentran en la identificación de rutas de transmisión para la SER en coordinación simultánea con la SAG. Los resultados de las pruebas desarrolladas sobre el sistema IEEE39–Bus demuestran la eficiencia del algoritmo y la calidad de las soluciones obtenidas.
Palabras clave: búsqueda de rutas de transmisión, lenguaje de descripción de dominios de planificación, PDDL, planificación automatizada, restauración de sistemas eléctricos de potencia.
ABSTRACT
The restoration planning is a very important task in the operation of electric power systems. A plan which reduce the duration of the restoration, minimize the impacts of outages in the economy and the society. In this paper it is presented a new method based on automated planning (AP) to restore the transmission network after a blackout. In the early stages of electric power system restoration is important to coordinate simultaneously the generator start-up sequence (GSS) with the branches energization sequence (BES) to decrease the duration of the restoration. The formulations presented in this article are based on automated planning actions, which focus on the identification of transmission paths for the BE Sin simultaneous coordination with the GSS. The tests results de veloped on IEEE39–Bus system demonstrate the efficiency of the algorithm and the quality of the solutions obtained.
Key words: transmission path search, planning domain description language, PDDL, automated planning, power system restoration.
INTRODUCCIÓN
Los colapsos de energía de gran extensión usualmente suceden por la ocurrencia de grandes perturbaciones tales como; la desconexión de varias unidades de generación, fallas en líneas importantes del sistema de transmisión o una caída repentina de la carga. Después de un colapso del sistema eléctrico de potencia (SEP), la planificación de la restauración es una de las tareas más importantes a desarrollar. La reducción de la duración en la restauración de los SE Ps tiene un impacto directo sobre la economía y la sociedad. El proceso de planificación de la restauración se concentra en tres tareas principales: la determinación de una secuencia de arranque para las unidades de generación, la reconfiguración de la estructura de la red de transmisión y la conexión de las cargas. Bajo una situación de restauración, los despachadores de turno en los centros de control planificarán y ejecutarán varias acciones sobre los diferentes elementos de control del SEP para retornarlo a su estado normal de operación.
El presente artículo se concentra en la determinación de la secuencia de acciones para la energización de líneas y trasformadores en la reconfiguración de la red de transmisión. La reconfiguración de la red en la restauración del SEP ha sido abordada por varios autores, los trabajos más relevantes utilizan métodos tales como; Sistemas Multi-Agente [1], algoritmo de Dijkstra [2]-[3], Optimización por Enjambre de Partículas [4], Algoritmos Genéticos [5], algoritmo basado en el Factor de Distribución de Transferencia de Potencia [6] y Programación Matemática [7]-[8].
En las primeras etapas del proceso de restauración es de vital importancia coordinar de forma simultánea la SAG con la SER para reducir el tiempo total de restauración del SEP. La coordinación simultánea de la SAG con la SER para el cálculo de los planes de restauración es un complejo problema de planificación y optimización de operaciones difícil de resolver.
A conocimiento de los autores, el trabajo más reciente y relevante que aborda de manera conjunta los problemas de la SAG y la SER se expone en [8], que es una continuación de un trabajo previo [7], donde se proponen métodos de optimización matemática para encontrar las soluciones. Aunque en [8]se tratan de manera simultánea los problemas de la SAG con la SER; la naturaleza discreta en el tratamiento del tiempo del algoritmo impide que se obtengan tiempos de restauración mínimos, además en las formulaciones no se integra las restricciones de tiempo crítico [7] para especificar el mínimo tiempo para el calentamiento de las unidades así como el máximo tiempo que puede trascurrir hasta que una unidad térmica se enfríe luego de su desconexión de la red y finalmente no se incluye ningún criterio que minimice los problemas de sobre voltajes en la búsqueda de rutas de transmisión.
En un trabajo reciente [3], se propone un método que adopta la naturaleza flexible del tiempo, en donde el objetivo principal es la maximización de las cargas restauradas en cada periodo de tiempo. El problema de la restauración es transformado entonces a un problema de optimización combinatoria basado en la permutación y se resuelve con el uso de un algoritmo evolutivo inspirado en el quantum. Sin embargo, la incapacidad del algoritmo para manejar de manera simultánea la SAG con la SER al igual que en [7], hace que sea difícil encontrar una solución óptima, pues no se puede capturar dentro del cálculo de la SAG los cambios en los parámetros en la red de transmisión que pueden tomar lugar cuando se realizan maniobras de corta duración en la SER (ej. energización de una barra, línea etc.)
Desde el punto de vista numérico y del tiempo en el tratamiento de la potencia eléctrica, la SAG para la restauración de SEPs es principalmente un problema de PA del tipo productor-consumidor [9]. En este tipo de problemas coexisten acciones que producen y/o consumen el recurso de la potencia eléctrica mientras se ejecutan. Estas acciones productoras y consumidoras pueden aumentar y disminuir respectivamente el valor de la potencia total del SEP en el intervalo de tiempo de la restauración.
En el presente trabajo se utilizan las técnicas de PA, una rama muy importante de la Inteligencia Artificial para encontrar las rutas de transmisión en la restauración de SEP. Las formulaciones presentadas en el presenteartículosebasan en acciones de restauración de SE Ps descritas en un lenguaje dePA, que logran una coordinación simultánea de la SER con la SAG para reducir el tiempo de restauración. En las formulaciones se adopta la naturaleza continua y flexible del tiempo tanto para el arranque de los generadores como para laidentificación de las conexiones entre los nodos, líneas y transformadores en la energización del sistema de transmisión. Los resultados de las pruebas sobre el sistema IEEE39–Busdemuestran la eficiencia del algoritmo y la calidad de las soluciones obtenidas.
Formulación del problema
Las unidades de generación son clasificadas en unidades de arranque en negro (BS – por sus siglas en ingles) y unidades de no arranque en negro (NBS – por sus siglas en ingles). Una unidad BS (ej. hidráulica o turbina de combustión) puede ser arrancada por si sola sin necesidad de un suministro externo de potencia para el arranque. Por otro lado las unidades NBS (ej. turbina de vapor) requieren de una potencia externa para arrancar o reiniciar. Los principales objetivos en las etapas iníciales de la restauración de SE Ps se concentran principalmente en suministrar rápidamente la potencia para el arranque de cada una de las unidades NBS y en restaurarlas distintas rutas en la red de transmisión para la interconexión de todas las unidades de generación. El despachador del SEP bajo una situación de restauración ejecutará varias acciones para cambiar el estado de los diferentes elementos en el sistema de transmisión en coordinación con la SAG para retornar al SEP a su estado normal de operación. La tarea inicial se concentra en restaurar las rutaspara interconectar las unidades BS con las unidades NBS.
En el presente artículo, la red de transmisión del SEP es formulada matemáticamente como un grafo Ψ según la ecuación (1),
donde:
V: Conjunto de vértices que representan a las barras del SEP y
E: Conjunto de aristas que representan los ramales (líneas y trasformadores) del SEP.
Los vértices y las aristas están relacionados entre sí por la ecuación (2)
donde:
bfrom y bto: Par de vértices a los que la arista ek está conectada.
El conjunto de vértices V Є Ψ está relacionado por la ecuación (3), donde BG, BL y B0 se definen en las ecuaciones (4), (5) y (6) respectivamente,
donde:
BG: Conjunto de barras con generadores.
BL: Conjunto de barras con cargas y
B0: Conjunto de barras sin ningún equipamiento primario asociado (generador o carga).
El conjunto de aristas E Є Ψ que se define en la ecuación (7), está constituido por las líneas S y trasformadores T definidos a su vez en las ecuaciones (8) y (9) respectivamente. Sea R una relación binaria, entonces se puede establecer con las ecuaciones (10) y (11) la conectividad existente de las barras con los generadores G y las cargas L respectivamente.
Secuencia de energización de ramales
La secuencia de energización de ramales (SER) consiste en el proceso paso a paso de energización de las barras, líneas y transformadores. Esta empieza desde la (s) barra (s) que contienen una fuente de potencia disponible (generador o interconexión) para iniciar el proceso de restauración de la red. La SER construye las rutas de enlace en el sistema de transmisión para suministrar de energía a las subestaciones de las unidades NBS apagadas, subestaciones de cargas des-energizadas y las subestaciones de conmutación. El estado de las barras y los ramales en el sistema de transmisión se representa con una variable binaria λ, 1 significa energizada, 0 significa des-energizada. Por otro lado, en el valor del estado de la barra de un generador λbG, 1 significa energizada, 0 significa des-energizada, cuyo valor está en funcióndel estado de sus dispositivos de conmutación de acuerdo con la ecuación (12), donde ΩHYD es el conjunto de unidades hidráulicas y ΩTHM es el conjunto unidades térmicas, C es una variable binaria que describe el estado de los interruptores, 1 significa cerrado, 0 significa abierto.

La figura 1, muestra un esquema simplificado de la conexión de las unidades de generación con la red, donde: CG = interruptor del generador, CI = interruptor del bloque generador–transformador, bG= barra del generador, b0 = barra de la red yAux = servicios auxiliares de la unidad de generación.
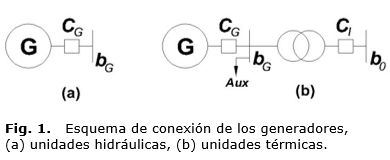
Una unidad de generación está en condiciones de entregar potencia PG al SEP según la ecuación (13), solamente si está en paralelo con la red (CG = 1) en el tiempo tp de acuerdo con la ecuación (14), donde T es el tiempo total de restauración del SEP, tst es el tiempo de arranque de la unidad,Tcp es un intervalo de preparación o calentamiento de la unidad (incluido el tiempo de sincronización), Kes el factor de rampa de toma de carga de la unidad y Pmax es la potencia máxima de la unidad.


El arranque de las unidades requiere de la potencia R según la ecuación (15) para el suministro de los servicios auxiliares en la barra bG de la figura 1. Para realizar el suministro oportuno de la potencia Ra las unidades, en el tiempo tst la barra del generador debe estar energizadade acuerdo con restricción (16), y sujeta a la restricción temporal (17) donde Tmin y Tmax son los intervalos de tiempo críticos [7] para el reinicio de las unidades NBS. En el problema de la SAG el objetivo consiste en maximizar la capacidad de generación total del SEP. El conjunto de ecuaciones (13)-(17) establece una función lineal definida portramos (piecewise) que representa la curva de capacidad de generación de cada unidad.

Acciones para la restauración de la red de transmisión
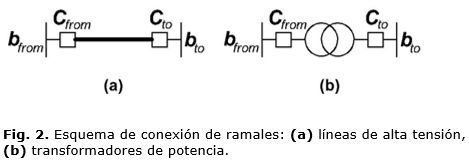
La restauración total de la red de transmisión para la interconexión de las unidades se realiza con maniobras sobre los interruptores de las líneas y transformadores. La figura 2, muestra un esquema simplificado de conexión de los ramales con las barras. Principalmente, se utiliza dos tipos de acciones denominadas a7 y a8. La acción a7 conecta radialmente un ramal en la red desde una barra energizada hasta una barra desenergizada. Por otro lado, la acción a8 energiza un ramal entre dos barras energizadas para cerrar un circuito en la red. En la figura 2, se describe un esquema simplificado, donde se muestra los distintos elementos que se utiliza para la conexión/desconexión de los ramales de la red de transmisión de energía eléctrica, donde: Cfrom = interruptor de lado inicial del ramal, Cto= interruptor del lado final del ramal, bfrom= barra del lado inicial del ramal, bto= barra del lado final del ramal.
La acción a7 inicia su ejecución en el punto de tiempo ta7y tiene un incremento Δta7 que corresponde a la duración de la acción a7. La ecuación (18) define las restricciones de tiempo para la ejecución de la acción a7 en la energización de dos ramales sobre una misma ruta de transmisión.
La expresión ![]() de la ecuación (18) indica una relación de precedencia derivada desde Ψ si existe un par de aristas ek, ek+1 donde la acción a7 sobre el ramal en la ecuación (2) debe ser completada antes que la misma acción a7 pueda ejecutarse sobre un ramal ek + 1 = (bto, bto+1). La acción a7 se ejecutade la siguiente manera; si en el punto de tiempo
de la ecuación (18) indica una relación de precedencia derivada desde Ψ si existe un par de aristas ek, ek+1 donde la acción a7 sobre el ramal en la ecuación (2) debe ser completada antes que la misma acción a7 pueda ejecutarse sobre un ramal ek + 1 = (bto, bto+1). La acción a7 se ejecutade la siguiente manera; si en el punto de tiempo ![]() la barra de lado inicial,en la ecuación (2), esta energizada y tanto el ramal ek como la barra del lado final están ambos desenergizados, entonces se procede inmediatamente a cerrar el disyuntor del lado de inicio (energizar ramal ek) y luego de un periodo de tiempo Δt se cierra el disyuntor del lado final (que energiza la barra del lado final) de acuerdo con la ecuación (19).
la barra de lado inicial,en la ecuación (2), esta energizada y tanto el ramal ek como la barra del lado final están ambos desenergizados, entonces se procede inmediatamente a cerrar el disyuntor del lado de inicio (energizar ramal ek) y luego de un periodo de tiempo Δt se cierra el disyuntor del lado final (que energiza la barra del lado final) de acuerdo con la ecuación (19).

La acción a7 al final creará un ramal entre una barra existente y una nueva barra. La reconfiguración de la estructura de red (backbone) con el uso de la acción a7 se realiza paso a paso construyendo un árbol de expansión mínimo, con raíz en una barra energizada (de una unidad BS) y las barras, líneas y transformadores desenergizados sobre las rutas más cortas entre ellos. El efecto de expansión de la red con la acción a7 se efectúa de forma radial y secuencial sobre una misma ruta de transmisión. Por otro lado si en una misma barra existe más de un ramal conectado, la acción puede ejecutarse (de ser necesario) en paralelo y simultáneamente sobre cada uno de estos ramales para conformar nuevas rutas de transmisión.
La acción a8 se ejecuta de la siguiente manera; si en el punto de tiempo ![]() las barras del lado inicial y final, en la ecuación (2), están energizadas y el ramal ek está des-energizado, entonces se procede a cerrar el disyuntor del lado de inicio para energizar ramal ek y luego del periodo de tiempo Δt se cierra el circuito con el disyuntor del lado final de acuerdo con la ecuación (19). La acción a8 al final creará un ramal entre dos barras existentes. La acción a8 cierra los circuitos con los ramales que quedaron sin energizar por la acción a7 en la planificación de rutas.
las barras del lado inicial y final, en la ecuación (2), están energizadas y el ramal ek está des-energizado, entonces se procede a cerrar el disyuntor del lado de inicio para energizar ramal ek y luego del periodo de tiempo Δt se cierra el circuito con el disyuntor del lado final de acuerdo con la ecuación (19). La acción a8 al final creará un ramal entre dos barras existentes. La acción a8 cierra los circuitos con los ramales que quedaron sin energizar por la acción a7 en la planificación de rutas.
A fin de minimizar las situaciones de sobrevoltajes en barras por la energización de grandes líneas de alta tensión ligeramente cargadas, con la función objetivo (20) se elige solo las rutas que obtengan la mínima suma de potencia reactiva, donde λe es el estado del ramal (línea o transformador) y We es un peso asignado a cada arista e∈ E que representa la potencia reactiva del ramal, donde W = 2πfCU2, siendo f la frecuencia, C la capacitancia y U el voltaje de operación del ramal. Para evitar problemas de ferro-resonancia por la presencia de muchos transformadores en una misma ruta de transmisión, se ajusta un valor grande en el peso W en la ecuación (20) para las aristas que representan los transformadores.
Modelo de planificación automatizada
Los algoritmos de PA utilizan como entrada dos archivos,el dominio y el problema ambos codificados en el lenguaje estándar de descripción de dominios de planificación (PDDL, por sus siglas en inglés) [10]-[12]. En el dominio se describe todo el conocimiento operacional (accionesposibles) que utilizará el algoritmo para realizar la planificación. Por otro lado, en el problema se describe la situación específica o situación a resolver a través de la planificación.
El algoritmo de PA hace uso del conocimiento incluido en el dominio para realizar la búsqueda del plan que lleve al SEP desde el estado inicial de colapso hasta su estado normal de operación. Tanto el modelo matemático (estático) para describirel estado inicial (de colapso) del SEP como los objetivos de restauración a lograrse (estado normal de operación), se incluyen en el archivo del problema.
Descripción del dominio de planificaciónEl dominio PDDL desarrollado en el presente trabajo, se construyó con la finalidad de coordinar simultáneamente el problema de la SER con el problema de la SAG para minimizar el tiempo de restauración de SEPs. En las distintas secciones del formato del dominio PDDL se especificó: los parámetros que indican el nivel de dificultad del lenguaje PDDL en el que fue codificado el dominio, los tipos de objetos (generadores, barras, líneas y transformadores) involucrados, las variables (funciones) numéricas y las distintas acciones disponibles. El dominio de planificación es el conocimiento operacional que guía la búsqueda para que el algoritmo de PA intente determinar una secuencia de accionesque lleve al SEP desde el estado inicial de colapsoal estado normal de operación.
En la tabla1, se describe de forma general a las acciones que fueron codificadas aPDDLen el dominio de planificación. Las acciones a1–a6 se encargan exclusivamente de la SAG para la restauración de SEPs. Las acciones a7–a8 pueden interactuar con las acciones a1–a6 paralograr la coordinación simultánea de la SAG con la SER. Cada acción PDDL descrita en la tabla 1, contiene un conjunto de elementos representados en una estructura de datos de diferente tipo: ![]() , donde dur corresponde a la duración de la acción,
, donde dur corresponde a la duración de la acción, ![]() ,
,![]() y Pre↔ son las condiciones de inicio, final e invariantes, respectivamente que se deben cumplir antes, después y durante la ejecución de la acción.
y Pre↔ son las condiciones de inicio, final e invariantes, respectivamente que se deben cumplir antes, después y durante la ejecución de la acción. ![]() y
y ![]() , son los efectos de la acción que se ejecutan al inicio y al final respetivamente.
, son los efectos de la acción que se ejecutan al inicio y al final respetivamente.

La duración Δta7 de la ecuación (18) se representa enla variable de duración (dur) de la acción a7, para asignar un valor de duración exclusivo para cada ramal (línea o trasformador), adaptándose a los tiempos de maniobras prácticos manejados en los centros de control de SEPs.
En las condiciones de inicio (![]() ) de la acción a7 se incluyó la relación de precedencia entre ramales de la ecuación (18) utilizando dos fórmulas lógicas (literales) PBEL(bfrom, ek) y PBEL(bto, ek) de acuerdo con la ecuación (2), donde PBEL es un predicado que expresa que la barra del lado de inicial bfrom y la barra del lado final bto pertenecen al ramal ek, donde la barra bfrom está energizada al inicio (
) de la acción a7 se incluyó la relación de precedencia entre ramales de la ecuación (18) utilizando dos fórmulas lógicas (literales) PBEL(bfrom, ek) y PBEL(bto, ek) de acuerdo con la ecuación (2), donde PBEL es un predicado que expresa que la barra del lado de inicial bfrom y la barra del lado final bto pertenecen al ramal ek, donde la barra bfrom está energizada al inicio (![]() ). El criterio de seguridad contra sobrevoltajes en barras expresado en la ecuación (20), se incluye en las condiciones de inicio (
). El criterio de seguridad contra sobrevoltajes en barras expresado en la ecuación (20), se incluye en las condiciones de inicio (![]() ) de la acción a7 en la ecuacion 21:
) de la acción a7 en la ecuacion 21:
donde: M es un número grande.
Si las condiciones (Pre) de la acción a7 se cumplen, entonces se ejecutan sus efectos (![]() ). Los efectos iniciales (
). Los efectos iniciales (![]() ) de la acción a7 declaran que el ramal quedará energizado, por otro lado los efectos finales
) de la acción a7 declaran que el ramal quedará energizado, por otro lado los efectos finales ![]() de la acción a7 declaran que la barra del lado final quedará energizada
de la acción a7 declaran que la barra del lado final quedará energizada ![]() , en concordancia con la ecuación (19). La variable de duración (dur) de la acción a8 adopta los mismos valores descritos en la duración de la ecuación (18). En las condiciones de inicio (
, en concordancia con la ecuación (19). La variable de duración (dur) de la acción a8 adopta los mismos valores descritos en la duración de la ecuación (18). En las condiciones de inicio (![]() ) de la acción a8 se incluye de igual forma la relación de precedencia entre ramal descrito en la ecuación (18) utilizando dos fórmulas lógicas (literales) PBEL(bfrom, ek) y PBEL(bto, ek) de acuerdo con la ecuación (2). En las condiciones de inicio (
) de la acción a8 se incluye de igual forma la relación de precedencia entre ramal descrito en la ecuación (18) utilizando dos fórmulas lógicas (literales) PBEL(bfrom, ek) y PBEL(bto, ek) de acuerdo con la ecuación (2). En las condiciones de inicio (![]() ) de la acción a8 se comprueba que la barra del lado de inicio bfrom y la barra del lado final btode la ecuación (2) estén ambas energizadas . Los efectos iniciales (
) de la acción a8 se comprueba que la barra del lado de inicio bfrom y la barra del lado final btode la ecuación (2) estén ambas energizadas . Los efectos iniciales (![]() ) de la acción a8 declaran que el ramal quedará energizado, por otro lado los efectos finales (
) de la acción a8 declaran que el ramal quedará energizado, por otro lado los efectos finales (![]() ) declaran que se cierra el circuito con el disyuntor del lado final del ramal de acuerdo con la ecuación (19).
) declaran que se cierra el circuito con el disyuntor del lado final del ramal de acuerdo con la ecuación (19).
Bajo una situación de colapso completo del SEP, las principales fuentes iniciales de energía son las unidades BS en estado de apagadas o arrancadas y las unidades NBS en estado de aisladas o arrancadas, por lo tanto los efectos finales (![]() )de las acciones a1, a5 y los efectos iniciales (
)de las acciones a1, a5 y los efectos iniciales (![]() ) de la acción a6 son las que inician la energización de las barras de donde se comenzará a expandir los ramales a través de la red. La decisión del tiempo tp donde se empieza a incrementar la potencia de salida de las unidades BS y NBS se hace con las acciones a2 y a6 respectivamente, para esto se hace uso de un predicado en las condiciones de inicio (
) de la acción a6 son las que inician la energización de las barras de donde se comenzará a expandir los ramales a través de la red. La decisión del tiempo tp donde se empieza a incrementar la potencia de salida de las unidades BS y NBS se hace con las acciones a2 y a6 respectivamente, para esto se hace uso de un predicado en las condiciones de inicio (![]() ) que representa la variable binaria CG de la ecuación (13) para verificar que el generador esté en paralelo con la red. La decisión del tiempo tst donde se realiza el suministro de la potencia R según la ecuación (15), se realiza con la acción a1 y a3. Para verificar si existe disponibilidad de energía desde la red, en la condición de inicio (
) que representa la variable binaria CG de la ecuación (13) para verificar que el generador esté en paralelo con la red. La decisión del tiempo tst donde se realiza el suministro de la potencia R según la ecuación (15), se realiza con la acción a1 y a3. Para verificar si existe disponibilidad de energía desde la red, en la condición de inicio (![]() ) de la acción a3 se evalúa el valor de verdad de un predicado que representa el estado de la barra delas unidades NBS de la
) de la acción a3 se evalúa el valor de verdad de un predicado que representa el estado de la barra delas unidades NBS de la ![]() ecuación (16).
ecuación (16).
Para el cumplimiento del intervalo de tiempo Tcp de la ecuación (14), se utiliza la variable de duración (dur) de las acciones a1 (unidades BS) y a3 (unidades NBS). Las unidades NBS aisladas pueden auto-abastecer sus propios requerimientos de potencia, por lo tanto la acción a4 tiene la capacidad de ponerlas en paralelo inmediatamente.
Aunque las acciones a7 y a8 pueden ser codificadas en el lenguaje PDDL2.1 [11], en el Nivel 3 (que permite la descripción de acciones con duración de tiempo discreto y operaciones aritméticas básicas), el dominio de planificación propuesto se construyó haciendo uso del lenguaje PDDL2.1 en el Nivel 4 y PDDL2.2 [12], ya que las acciones a1–a6 requieren un tratamiento continuo del tiempo en la actualización de la potencia generada por la unidades y el tratamiento de los literales iniciales temporizados (TILs– por sus siglas en inglés) para establecer la restricción de tiempo descrita en la ecuación (17), para el suministro de potencia de arranque a las unidades.
Descripción del problema de planificaciónEl archivo del problema PDDL es el modelo que describe una situación particular que el algoritmo de planificación tratará de resolver y se define en base al conocimiento operacional incluido en el dominio PDDL. En la estructura de los archivos de problema utilizados en la presente investigación se especificaron varios componentes. En el campo de los objetosse incluyó un listado de los elementos primarios del SEP (generadores, barras, líneas y transformadores). El campo del estado inicial representa el modelo matemático estático que describe el estado actual de un SEP en particular, donde se incluye: varias funciones numéricas PDDL para especificar los parámetros que representan las características físicas de los generadores, líneas y transformadores, varios literales en la forma de triplas PDDL〈predicado, sujeto barra_from, objeto ramal〉, ⟨predicado, sujeto barra_to, objeto ramal⟩ para representar la topología de la red de trasmisión descrita en las ecuaciones (1), (2), (3), (4), (5), (6), (7), (8) y (9), varios literales en la forma de triplas PDDL ⟨predicado, sujetobarra, objetogenerador⟩ para representar la conexión existente entre los generadores y las barras del SEP según las ecuaciones (4) y (10).
Se debe notar que la información incluida en el campo del estado inicial del archivo del problema, crea un modelo matemático del tipo bus-branch que expresa las características y situación actual del SEP con un enfoque abstracto similar a la información incluida en los formatos de entrada utilizados en las distintas herramientas de simulación de SEPs. En el campo del estado objetivo del problema se describe con el uso de la lógica proposicional (lista de literales de valor verdadero) al estado objetivo a obtenerseen el SEPdespués del proceso de planificación. Este estado objetivo puede ser seleccionado a criterio del usuario, donde se puede elegir el estado final deseado en cada una de las unidades de generación, barras y/o ramales disponibles.
RESULTADOS
Con propósitos de validación y comparación de los resultados obtenidos con el método propuesto, se utiliza como caso de estudio al sistema IEEE39–Bustal y conforme se describe en [7] y [8]. El sistemaIEEE39–Buscontiene diez unidades de generación, 39 barras y 46 ramales. En la tabla 2 se describen los datos de los generadores del sistema IEEE39–Bus, donde el generador G10 es BS y los generadores G1 a G9 son NBS.

En la presente investigación se utiliza el planificador automático POPF [13], para encontrar los planes de restauración, primero porque es el único capaz de tratar con las acciones PDD Lque tienen efectos numéricos que cambian continuamente en el tiempo y segundo porque es el único planificador que permite el tratamiento de problemas PDDL que incluyan TILs con valor de verdad negado. POPF es un planificador temporal que utiliza un algoritmo de programación entera mixta (MIP – por sus siglas en inglés) para verificar el cumplimiento de las restricciones numéricas de las acciones PDDL que tienen efectos numéricos que cambian continuamente en el tiempo. Los resultados reportados en el presente artículo fueron obtenidos con el planificador POPF bajo el modo de búsqueda "primero el mejor" (Best First Search) en cooperación con el algoritmo MIP denominado COIN-OR LP (CLP) versión 1.12.0-2.1. Los experimentos se corrieron en un PC con procesador Intel Core i3-2120 de 3,30 GHz de velocidad y 4 GB de memoria RAM bajo el sistema operativo Linux-Ubuntu v12.04 LTS de32-bit.
La tabla 3, describe el plan de restauración calculado después de 11,04 s de tiempo computacional. Con este plan se obtiene un tiempo total de restauración de 259,94 min. Aunque la duración de las acciones a7 y a8 puede adoptar, individualmente, cualquier valor; aquí se ajusta un valor fijo de 5 min para cada ramal de acuerdo con [7] y [8].
Sobre la topología del sistema IEEE39–Bus de la figura 4, se ilustra con colores las rutas de transmisión que se forman con la simulación de las acciones del plan de restauración calculado en la tabla 3.

La figura 5, muestra la curva de capacidad de generación total que se obtiene como resultado de la simulación de las acciones sobre las unidades de generación, logrando una energía total disponible para el período de restauración de 10896,571 MWh.

La tabla 4, compara los resultados encontrados en la presente investigación con los resultados reportados en varios trabajos similares.

DISCUSIÓN
Los resultados de las pruebas sobre el sistema IEEE39–Bus demuestran la eficiencia del algoritmo y la calidad de las soluciones encontradas, obteniendo un tiempo total de restauración menor a los reportados en trabajos de investigación similares. Esta disminución del tiempo total de la restauración de los SEPs reduciría los impactos que producen los apagones de gran extensión sobre la economía y la sociedad. En los modelos MILP para la SAG reportados en [7] y [8] se asume que las unidades pueden incrementar rápidamente su potencia incluso sin estar conectadas a la red. Sin embargo, en la práctica solo las unidades que están conectadas pueden entregar potencia al SEP para la energización de las cargas en la red.
En las formulaciones de optimización paso a paso de [7] y [8], se divide al horizonte tiempo en intervalos de ancho fijo. Aunque esta técnica es muy útil para facilitar la actualización de algunas funciones numéricas lineales continuas, el algoritmo puede pasar por alto ciertos cambios que se producen entre los intervalos aumentando el tiempo de restauración del SEP. Una solución a este problema podría ser dividiendo en un mayor número de intervalos a este horizonte de tiempo para mejorar la precisión en la actualizaciónde las funciones numéricas. Sin embargo, esto consumirá una considerable cantidad de memoria computacional adicional y más tiempo de cálculo. En la presente investigación se utilizael enfoque flexible del planificador POPF [13] para el manejo de las duraciones de las acciones, donde se actualiza el valor de las variables solamente en los puntos de tiempo donde realmente ocurren cambios en el estado del SEP. Esto es muy útil para encontrar mejores soluciones de forma eficiente. POPF utiliza un solucionador MIP para la optimización de las variables numéricas involucradas en los efectos numéricos de algunas acciones productoras de recursos numéricos y para la verificación de las restricciones numéricas (lineales) de las acciones consumidoras de los recursos numéricos producidos. De esta forma el solucionador MIP se concentra solamente en la optimización numérica mientras que la heurística del planificador se concentra exclusivamente en el asunto combinatorio del ordenamiento de las accionesde restauración propuestas por el MIP.
En la presente investigación la duración de las acciones adopta un valor individual en su ordenamiento, permitiendo una discretización del tiempo a intervalos de tiempo flexibles. Bajo este enfoque flexible del tiempo, el solucionador de problemas MIP no se encuentra afectado por los componentes cuadráticos que se producen con las variables binarias (existentes en las formulaciones MILP) para representar el cambio del estado de los distintos elementos en cada intervalo de tiempo. El lenguaje de descripción de dominios de planificación PDDLutilizado para representar las formulaciones expuestas en el presente artículo se limita exclusivamente a comportamientos numéricos lineales. Consecuentemente, algunas restricciones numéricas no-lineales del problema de restauración de SEPs no pueden ser modeladas en PDDL y tampoco existe en la actualidad un algoritmo de PA que pueda tratarlas, en especial los asuntos del voltaje en barras que requiere de un análisis numérico complejo del flujo de potencia en la red. Existen trabajos [7], [14] donde se verifican estas restricciones no-lineales con el uso de un software externo, sin embargo no es aconsejable incorporar más restricciones complejas a los problemas primarios de planificación ya que esto no solo ralentiza la velocidad de cálculo sino que además compromete la optimalidad global de las soluciones obtenidas.
Un enfoque alternativo a la solución de los problemas de planificación con restricciones complejas no-lineales sería reducir la complejidad matemática de estas restricciones a fin de obtener un modelo más tratable por los algoritmos de planificación. Esta técnica debe ser efectiva cuando el problema a resolver es obtenido por la adopción de los "problemas primarios" de planificación bien resueltos y la verificación del cumplimiento de tales restricciones podría ser realizada en un proceso externo adicional fuera de línea. Por lo tanto, es necesario establecer otros mecanismos alternativos para la validación fuera de línea de las restricciones numéricas no-lineales sobre una solución calculada. Además, es necesario involucrar el proceso de conexión de las cargas en cada paso sobre el plan calculado, para mantener el balance de potencia activa de acuerdo a la capacidad de generación disponible en cada momento. Por otro lado, en caso de existir violaciones en las restricciones, se necesita crear mecanismos de corrección haciendo uso de los dispositivos de control disponibles en el SEP.
CONCLUSIONES
Se propone un nuevo método basado en las técnicas de PA para el establecimiento de las rutas en el sistema de transmisión durante la restauración de sistemas eléctricos de potencia. Las formulaciones presentadas fueron codificadas como acciones en el lenguaje PDDL logrando una coordinación simultánea de la secuencia de energización de líneas y transformadores con la secuencia de arranque de los generadores, disminuyendo notablemente los tiempos de restauración del SEP.
Los resultados de las pruebas sobre el sistema IEEE39–Bus demuestran la calidad de los soluciones al reducir significativamente la duración de la restauración para minimizar los impactos de los apagones sobre la economía y la sociedad. El nivel de compactación de las formulaciones PDDL y la capacidad de tratamiento del tiempo continuo del algoritmo de planificación utilizado permite un acceso dinámico, flexible y preciso a los cambios de la potencia en cada instante. Esto influye directamente en la eficiencia del algoritmo y la calidad de las soluciones.
REFERENCIAS
1. FUKUNAGA, Shinnosuke; NAGATA, Takeshi, "A decentralized power system restoration by means of multi-agent approach". Energy Procedia, 2012, vol. 14, p. 711-716, ISSN 1876-6102, doi:10.1016/j.egypro.2011.12.1000.
2. HOU, Yunhe, et al., "Computation of milestones for decision support during system restoration". IEEE Transactions on Power Systems, 2011, vol. 26, no 3, p. 1399-1409. ISSN 0885-8950. DOI:10.1109/TPWRS.2010.2089540.
3. HOU, Jia, et al. "Permutation-based power system restoration in smart grid considering load prioritization". Electric Power Components and Systems, 2014, vol. 42, no. 3-4, p. 361-371, ISSN 1532-5016, DOI:10.1080/15325008.2013.862326.
4. LIU, Yan; GU, Xueping, "An evolved skeleton-network reconfiguration strategy based on topological characteristic of complex networks for power system restoration". En: IEEE, 44th Hawaii International Conference on System Sciences (HICSS), 2011. p. 1-9. ISSN 1530-1605, doi: 10.1109/HICSS.2011.53.
5. EL-WERFELLI, Mahmud, et al., "Backbone-network reconfiguration for power system restoration using genetic algorithm and expert system". En: IEEE International Conference on Sustainable Power Generation and Supply SUPERGEN'09, 2009. p. 1-6, ISBN 978-1-4244-4934-7, doi: 10.1109/SUPERGEN.2009.5347909.
6. WANG, Chong, et al., "PTDF-based automatic restoration path selection". IEEE Transactions on Power Systems, 2010, vol. 25, no. 3, p. 1686-1695. ISSN 0885-8950, doi: 10.1109/TPWRS.2009.2037820.
7. SUN, Wei, et al., "Optimal generator start-up strategy for bulk power system restoration". IEEE Transactions on Power Systems, 2011, vol. 26, no. 3, p. 1357–1366, ISSN 0885-8950. doi: 10.1109/TPWRS.2010.2089646.
8. SUN, Wei; LIU, Chen–Ching, "Optimal transmission path search in power system restoration". En: Bulk Power System Dynamics and Control-IX Optimization, Security and Control of the Emerging Power Grid (IREP), IEEE 2013 IREP Symposium, 2013. p. 1-5. E-ISBN 978-1-4799-0199-9, doi: 10.1109/IREP.2013.6629393.
9. COLES, Amanda, et al., "A hybrid LP-RPG heuristic for modelling numeric resource flows in planning". Journal of Artificial Intelligence Research (JAIR), 2013, vol. 46, p. 343-412. ISSN 1076-9757, doi:10.1613/jair.3788.
10. FOX, Maria; LONG, Derek, "Modelling mixed discrete-continuous domains for planning". Journal of Artificial Intelligence Research (JAIR), 2006, vol. 27, p. 235-297, ISSN 1076-9757.
11. FOX, Maria; LONG, Derek. "PDDL2.1: An extension to PDDL for expressing temporal planning domains". Journal of Artificial Intelligence Research (JAIR), 2003, vol. 20, p. 61-124. ISSN 1076-9757.
12. EDELKAMP, Stefan; HOFFMANN, Jörg., "PDDL2. 2: The language for the classical part of the 4th international planning competition". Reporte Técnico No. 195. En: 4th International Planning Competition (IPC’04), ICAPS’04, 2004. Disponible en: http://www.plg.inf.uc3m.es/ipc2011-deterministic/attachments/Resources.
13. COLES, Amanda, et al. "Forward-chaining partial-order planning". En: Proceedings of the Twentieth International Conference on Automated Planning and Scheduling (ICAPS 2010). AAAI Publications. 2010,p. 42-49. ISBN 978-1-57735-450-5.
14. PIACENTINI, Chiara, et al., "Combining a temporal planner with an external solver for the power balancing problem in an electricity network". En: Twenty-Third International Conference on Automated Planning and Scheduling. AAAI Publications. 2013. p. 398-406. ISBN 978-1-57735-609-7.
Recibido: mayo de 2015
Aprobado: julio de 2015
AUTORES
Ignat Pérez Almirall. Ingeniero Electricista, Doctor en Ciencias Técnicas, Profesor Auxiliar, Centro de Investigaciones y Pruebas Electroenergética, CIPEL. Instituto Superior Politécnico José Antonio Echeverría, Cujae, La Habana, Cuba. e-mail: ignat@electrica.cujae.edu.cu


{kind=link}