










 Custom services
Custom services
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
Introducción
Durante la explotación de las centrales generadoras de electricidad de grupos electrógenos en Cuba en un inicio se presentaron algunos problemas relacionados con la salida por mala operación de la protección contra fallo de pistón en unidades diésel Guascor de 1 MW, al momento de su sincronización y toma de carga. Estas unidades generadoras estaban localizadas cercanas a otras fuentes de generación y conformando parte de una red eléctrica mallada. El fenómeno se manifestaba de manera aleatoria, sobre todo en aquellas unidades que tenían carga activa alrededor del 30% de su valor nominal, nunca con valores de carga superiores. El principio de operación de la automática establece que, al arrancar las unidades y estabilizar la tensión y velocidad en los valores fijados para su sincronización, las mismas se conectan al sistema y toman carga con una rapidez programada previamente, pudiéndose producir otras sincronizaciones de manera aleatoria mientras algunas unidades están en proceso de toma de carga. La forma en que se sincronizan las unidades es propicia para la excitación de cualquier modo natural de bajo amortiguamiento en el caso en que éste exista [1], por lo que se dirigió la investigación hacia la aparición de oscilaciones de baja frecuencia en el momento de la sincronización. Se comenzó por determinar los modos mecánicos naturales de oscilación del sistema para cualquier régimen de trabajo que haya antecedido a la aparición del fenómeno, comprobándose si la amplitud de estas oscilaciones se correspondía con las que se producían cuando fallaba un pistón de estas unidades, pudiendo ser esta la causa de la operación incorrecta de la protección.
Materiales y métodos
Cálculo de los modos naturales de oscilación de las unidades Guascor
Los regímenes seleccionados para el análisis fueron los ocurridos el 5 de enero del 2010, a las 10:30 y a las 16:30 horas, momentos que antecedieron a la ocurrencia del fenómeno. A partir de la información necesaria de las unidades generadoras, los ajustes de sus controles de velocidad y tensión, la carga del sistema, y utilizando el paquete libre PSAT [2], se calcularon los modos naturales mecánicos de oscilación [3-5], asociados a las unidades Guascor en su nodo de conexión, bajo dos condiciones: sincronizadas a plena carga y sincronizadas sin carga, para ambos regímenes previos. Los resultados se muestran en la tabla 1.
Tabla 1 Modos mecánicos de oscilación asociados a unidades Guascor día 5 de enero 10:30 y 16:30 horas.
| 5 Enero 2010 | Sin carga | 100% carga |
|---|---|---|
| 10:30 horas. | -0.0143 ± 1.0009 | -0.45 ÷ 1.08 |
| 16:30 horas. | -0.021 ± 1.13 | -5.62± 3.36 |
Para el régimen correspondiente a las 16:30 horas se calcularon los modos mecánicos de oscilación para 25%, 50%, 75% y 100% de carga de las unidades, resultando los valores mostrados en la tabla 2.
Tabla 2 Modos mecánicos de oscilación asociados a unidades Guascor, día 5 de enero a las 16:30 horas para diferentes estados de carga en el nodo de conexión.
| Sin Carga | -0.021 ± 1.13 |
|---|---|
| 25 % de carga | -2.4 ± 1.38 |
| 50 % de carga | -4.18 ± 2.36 |
| 75% de carga | -4.31 ± 2.8 |
| 100% de carga | -5.62 ± 3.36 |
Los resultados anteriores comprueban que los regímenes que antecedieron a la ocurrencia del fenómeno tienen asociados modos mecánicos de oscilación de muy bajo amortiguamiento para las unidades Guascor en el nodo de conexión analizado que, en caso de ser excitados en el momento de la sincronización o cuando tienen un estado de carga activa bajo, pueden provocar oscilaciones mecánicas de la unidad, que pudieran ser la causa del fenómeno observado.
Para unidades Guascor conectadas a otros nodos de la misma red y para el mismo régimen del día 5 de enero a las 16:30 horas, sin carga y a plena carga, se obtuvieron los resultados mostrados en la tabla 3.
Tabla 3 Modos mecánicos de oscilación asociados a las unidades Guascor conectadas a otros nodos de conexión de la misma red y para el régimen del día 5 de enero a las 16:30 horas.
| Nodo | Sin carga | 100% carga |
|---|---|---|
| Nodo 1 | -1.42 ± 1.162 | -3.38 ± 2.6 |
| Nodo 2 | -2.2 ± 2.159 | -3.54 ± 2.5 |
Los resultados anteriores evidencian que es mucho más probable que cuando sea excitado uno de los modos mecánicos vistos, las oscilaciones que resulten sean mayores en magnitud para las unidades analizadas ya que tienen mucho menos amortiguamiento. Este resultado es lógico por estar estas unidades ubicadas en un extremo del sistema en una región de poca generación, y red de transmisión prácticamente radial.
Resultados de algunas modelaciones en el dominio del tiempo
Con el objetivo de comprobar los resultados antes vistos se procedió a analizar el comportamiento en el tiempo del proceso de sincronización y toma de carga de las unidades Guascor en la zona bajo estudio, utilizando el paquete libre PSAT [2].
El proceso de sincronización de las unidades Guascor se modeló según se muestra en la figura 1.

Las unidades a sincronizar se encuentran conectadas al transformador de subida mediante dos líneas, una de muy alta impedancia y la otra de muy baja impedancia, en serie con un interruptor abierto, que se cierra en el momento en que las tensiones en las barras de los generadores y del primario del transformador cumplen con las condiciones de módulo, ángulo y frecuencia. Se simularon las siguientes condiciones, partiendo del régimen correspondiente al día 5 de enero a las 16.30 horas. Sincronización de una unidad Guascor en el nodo bajo estudio en t = 20 seg, que se mantiene con cero cargas. En t= 100 seg se descargan en la acería por arco eléctrico, de manera busca, 50 MW y 20 Mvar, ver figura 2. Se conecta en t = 10 seg una unidad Guascor en el nodo bajo estudio, se mantiene sin carga. En el mismo nodo en t=160 seg se sincroniza otra unidad Guascor. Ver figura 3. En t = 0 se sincroniza una unidad Guascor en el nodo bajo estudio existiendo ya conectadas en ese mismo nodo otras unidades con 0%, 25%, 50%, 75% y 100% de su potencia activa nominal. Se repite el mismo proceso, pero en 50 seg se descargan 50 MW y 20 Mvar en la acería. (Ver figura 4).

Fuente: elaboración propia.
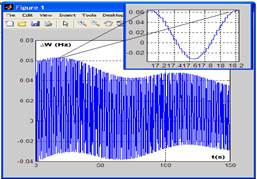
Fig. 2 Oscilaciones de la unidad Guascor en nodo bajo estudio al sincronizarse, y su reforzamiento al excitarse el modo de oscilación por descarga brusca en la acería por arco eléctrico. En negro frecuencia del sistema.
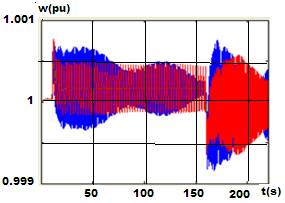
Fuente: elaboración propia.
Fig. 3 Oscilaciones de dos unidades Guascor en el nodo bajo estudio que se sincronizan a los 10 seg (azul) y a los 160 seg (rojo). Se mantienen con cero cargas.
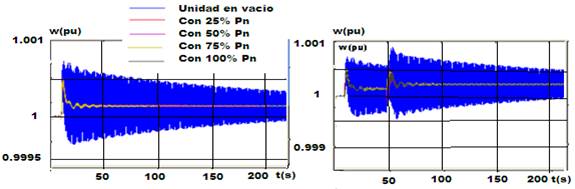
Fuente: elaboración propia.
Fig. 4 A la izquierda sincronización de una unidad Guascor en el nodo bajo estudio donde ya hay 4 unidades sincronizadas con diferentes valores de carga activa. A la derecha idem pero se descarga bruscamente la acería a los 50 seg.
De todos los resultados se puede concluir que:
En las unidades Guascor ubicadas en el nodo bajo estudio pueden existir regímenes de operación en los que existan modos mecánicos de oscilación de bajo amortiguamiento, de frecuencia cercana a 1 Hz, que pueden excitarse en el momento de la sincronización y reforzarse con perturbaciones que se puedan presentar en el sistema, mientras oscilan con bajos valores de carga.
La forma de arranque de las unidades Guascor propicia que se refuercen las oscilaciones de los modos naturales de oscilación cada vez que se sincronice una unidad a la misma barra de conexión.
La amplitud de las oscilaciones está en el orden de 0.03 a 0.07 Hz.
De cálculos adicionales efectuados se comprueba que, cuando la línea doble circuito que alimenta la región donde se ubica el nodo bajo estudio tiene un circuito fuera de servicio, el amortiguamiento del modo mecánico de baja frecuencia tiene menores valores que los relacionados en las tablas 1 y 2, y cuando se encuentran en servicio unidades de grupos electrógenos de tecnología MAN de 23 MVA que aportan energía a dicha línea doble circuito, éstas participan de manera importante en este modo de oscilación y provocan un reforzamiento de las oscilaciones [6].
Comprobación de activación de la protección de falla de pistón durante la sincronización
Para los ajustes de la protección contra fallo de pistón (protección Casandra) en los grupos Guascor [6], se compararon las variaciones de velocidad que se producen en el eje del motor para diferentes estados de carga estando trabajando correctamente todos los pistones y con un pistón con problemas de ignición, entre ambas condiciones para el mismo estado de carga. Se supuso el motor primario trabajando en modo potencia constante.
Para medir estas variaciones de velocidad se utilizó un filtro de 0.125 seg y después, en base a las pruebas, se seleccionó la frecuencia de muestreo que da la mayor sensibilidad en el cálculo de la diferencia de velocidad en el eje de la unidad. El diagrama en bloques del control de velocidad de la unidad Guascor suministrado por la firma alemana Heinzmann [7], se muestra en la figura 5.
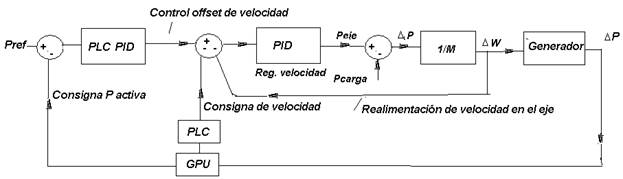
Fig. 5 Diagrama de bloques del control de potencia activa suministrado por la firma alemana Heinzmann.
El regulador de velocidad mostrado en el diagrama es el típico de cualquier unidad trabajando en régimen de regulación (“droop”), pero se le adiciona una retroalimentación de potencia que no permite que la unidad en estado estable varíe su potencia. Como se muestra en la figura 6, según indica la flecha 1, si la unidad está trabajando en paralelo con el sistema ante una variación de la carga la frecuencia cae de wo a wf. Esta variación de frecuencia depende del estatismo del sistema y de la perturbación, no de la unidad que tiene el régimen de potencia constante, pero su respuesta es, inicialmente, a incrementar su potencia, por lo que la retroalimentación de potencia lleva a la unidad de nuevo a la misma potencia inicial Po, como indica la flecha 2 de la figura 6. El efecto equivalente es como si esta retroalimentación disminuyera la frecuencia de referencia del esquema original de regulación de velocidad cuando no existe la retroalimentación de potencia.
El mecanismo anterior es similar a una regulación primaria de la frecuencia [8] y, después, una secundaria para asegurar un régimen de potencia activa constante; la unidad no participa en el mecanismo de regulación de frecuencia del sistema, se adapta a las variaciones de frecuencia. Esta filosofía de control es típica en todas las unidades térmicas o de otro tipo que no participan en el control de la frecuencia y ayudan a asimilar los regímenes transitorios bruscos de los sistemas eléctricos de potencia. Obsérvese que, aunque el régimen no es tipo “droop” y la variación de frecuencia depende del sistema, dependiendo del valor de estatismo que tenga el regulador de velocidad, así será el incremento transitorio de la potencia que es necesario corregir por el mecanismo de retroalimentación de potencia.

Fuente: elaboración propia.
Fig. 6 Descripción del trabajo del control de velocidad de la unidad Guascor.
Antes de entrar en la comprobación de la operación de la protección Casandra ante oscilaciones de bajo amortiguamiento en el sistema eléctrico de potencia donde se encuentran instalados los grupos electrógenos de tecnología Guascor, bajo estudio, es necesario analizar con más detalles el principio de funcionamiento de la misma y la variación de la característica velocidad o frecuencia versus potencia activa en estado estable cuando se produce el fallo de un pistón.
Cuando un motor primario de tipo reciprocante mueve un generador en vacío se producen oscilaciones alrededor de su velocidad nominal que típicamente son superiores a las que se producen a plena carga. En este último caso, el efecto de reacción de armadura cuando la unidad varía su velocidad del valor nominal induce, en los enrollados amortiguadores, fuerzas que disminuyen esas oscilaciones.
En el caso en que falle un pistón hay que tener en cuenta la potencia de freno y la potencia que lleva cada pistón. Como la unidad Guascor tiene 12 pistones, si se considera la potencia de freno en el orden del 7 % de su potencia nominal [9], entonces en vacío la falla de un pistón provoca que la potencia caiga un 7 % de 1/12 MW, o sea, 0.0058 MW, mientras que a plena carga la falla de un pistón provoca una caída de la potencia en 1/12 = 0.083 MW. Lo anterior indica que, mientras más cargada esté la unidad mayor será la variación de potencia debido a la salida o falla de un pistón y, por consiguiente, será mayor la caída de velocidad transitoria y de estado estable de la unidad. Si se considera el ajuste del control de velocidad con un 5 % (droop) [10], entonces la característica del control de velocidad cuando falle un pistón se moverá según indica en la figura 7.
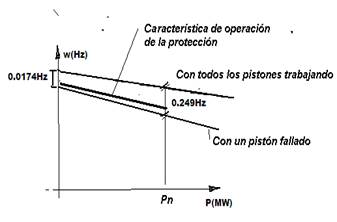
Fig. 7 Características de control de velocidad normal, con fallo de un pistón y de la protección Casandra.
De la información analizada se conoce que el ajuste de la protección contra fallo de pistón está fijado en el 60 % de diferencia entre ambas características [6] y que activa la salida de la unidad sólo si la potencia que lleva la máquina está por encima del 30 % de la nominal. Lo antes mencionado es lógico si se tiene en cuenta que cuando la unidad está poco cargada es muy poca la diferencia entre ambas características y, de estar activado el disparo en esos valores de carga, se corre el riesgo de operaciones incorrectas. Si se suponen diferentes valores de regulación de la característica del control de velocidad (4 % y 5 %) entonces, de acuerdo con la metodología de ajuste que indican los fabricantes [6], los valores de variaciones de velocidad que producen el disparo de la protección contra pérdida de pistón serían los indicados en la tabla 4.
Tabla 4 Valores de ajuste de disparo de la protección contra fallo de pistón de las unidades Guascor para diferentes valores de regulación del control de la unidad
| Droop 5% | Δw (Hz) | Δw (rpm) | Droop 4% | Δw (Hz) | Δw (rpm) |
|---|---|---|---|---|---|
| 0.3 MW | 0.046 | 1.38 | 0.3 MW | 0.036 | 1.11 |
| 0.5 MW | 0.076 | 2.28 | 0.5 MW | 0.061 | 1.83. |
| 1 MW | 0.15 | 4.5 | 1 MW | 0.12 | 3.6 |
En la norma ISO 8528-5 [11], se establece que todos los grupos tienen una banda de frecuencia que se corresponde con oscilaciones de la frecuencia alrededor de su valor nominal, y que ésta depende del tipo de grupo: G1, G2 o G3. Para tipo G2, la oscilación debe estar pico a pico por debajo de 1.5 % de la frecuencia nominal, y para tipo G3, por debajo de 0.5 %; incluso, si el estado de carga del generador está por debajo del 20 % esta oscilación pico a pico de la frecuencia puede ser superior. Si se considera en el caso bajo estudio un valor de 0.5 % la oscilación de la frecuencia, entonces esta oscilación debe ser del orden de (0.5/2) * 60 = 0.15 Hz.
Si se observan los resultados mostrados en la tabla 4, los valores de caídas de frecuencia de ajuste de la protección Casandra son, en la casi totalidad de los casos, menores que esta oscilación propia del motor; es por eso que la protección Casandra utiliza, previo al análisis de las desviaciones de frecuencia, un filtro de constante de tiempo de 0.125 seg y un tiempo de muestreo que debe eliminar esta oscilación natural típica del motor, que es necesario seleccionar para lograr la mayor sensibilidad y que es múltiplo de 3 seg [6]. Lo anterior queda claro si se considera que un ciclo de esta oscilación de la frecuencia debe producirse en un ciclo de combustión de la unidad, lo cual corresponde a 2 revoluciones; si la unidad es de 4 tiempos y la velocidad de rotación 1800 rpm, el período de la oscilación queda: (2/1800) * 60 = 0.066 seg.
Esta oscilación de velocidad, que es consecuencia del efecto reciprocante de los motores, al pasar por un filtro de constante de tiempo de 0.125 seg y muestrearse posteriormente con tiempos múltiplos de 3 segundos, queda eliminada.
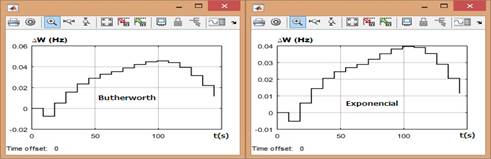
Para analizar de manera cualitativa si es posible una operación de la protección sin fallo de pistón, debido a las oscilaciones de bajo amortiguamiento en el sistema, se toma como caso de comprobación el de la figura 3, y se construye una función en el dominio del tiempo equivalente a la oscilación de la unidad respecto al sistema que se muestra en la figura 8. Se procesa la señal, pasando por un filtro exponencial de constante de tiempo 0.125 seg y otro Butherworth de orden 6 y frecuencia de corte de 50 rad/s, al final se digitaliza la señal con frecuencia de muestreo de 9 seg, que es el valor al cual se obtienen con mayor sensibilidad las oscilaciones de la unidad [6]. Los resultados de ambos procesamientos se muestran en la figura 9. En ambos casos se detectan oscilaciones de frecuencia con valores máximos entre 0.04 y 0.045 Hz. En la información recibida por Guascor se dice que solo hay operación de la protección Casandra cuando la potencia de salida de la unidad está por encima de 0.3 Pn, por lo que, si se compara el valor de 0.04 Hz con los valores calculados de disparo para diferentes estados de regulación (droop), mostrados en la tabla 4, se concluye que en el caso de que el droop sea 4 % puede ocurrir operación incorrecta de la protección. Si se tiene en cuenta que las oscilaciones pueden tener amplitudes superiores a las analizadas para el caso que durante el proceso de toma de carga se produzca una perturbación en el sistema antes de que la potencia de la unidad sobrepase el 30%, como es el caso mostrado en la figura 2, a los 100 seg donde las oscilaciones tienen valores máximos superiores a 0.06 Hz, entonces es posible la operación incorrecta de la protección para valores de droop iguales a 4 % y 5 %.
Fuente: elaboración propia.
Fig. 8 Oscilaciones de velocidad de la unidad Guascor en el nodo bajo estudio, coincidente con el mostrado en la figura 3.
Medidas para solucionar la operación incorrecta de la protección
Para evitar que en determinados regímenes de trabajo del sistema, las unidades Guascor analizadas puedan salir de servicio por operación incorrecta de la protección Casandra se consideran dos posibilidades:
Sintonización de un estabilizador del sistema de energía (PSS) para incrementar el amortiguamiento de los modos detectados.
Cambio de la automática de arranque y sincronización de las unidades Guascor en la región bajo estudio de manera que, cuando se sincronice una unidad no se sincronice la siguiente hasta que ésta no haya tomado una carga superior al 30% de su valor nominal.
Se considera más sencilla y ventajosa la segunda variante y se recomienda a la Empresa explotadora de estas unidades que se cambie el mecanismo de arranque cumpliendo los requisitos antes señalados. En el caso analizado en este trabajo se procedió por parte de la firma Heinzmann a cambiar el mecanismo de arranque y el cambio de la automática, cumpliendo las condiciones antes señaladas.
Conclusiones
El principio de operación de la automática establece que, al arrancar las unidades y estabilizar la tensión y velocidad en los valores fijados para su sincronización, las mismas se conectan al sistema y toman carga con una rapidez programada previamente, pudiéndose producir otras sincronizaciones de manera aleatoria mientras algunas unidades están en proceso de toma de carga.
En las unidades Guascor ubicadas en el nodo bajo estudio existían regímenes de operación con modos mecánicos de oscilación de bajo amortiguamiento, de frecuencia cercana a 1 Hz, que se excitaron en el momento de la sincronización y se reforzaron con perturbaciones del sistema. La forma de arranque de las unidades Guascor propiciaba un reforzamiento de las oscilaciones de los modos naturales de oscilación cada vez que se sincronizaba una unidad a la misma barra de conexión.
Para evitar que en determinados regímenes de trabajo del sistema las unidades Guascor analizadas salieran de servicio por operación incorrecta de la protección Casandra se procedió a cambiar el mecanismo de arranque asegurando que la sincronización de nuevas unidades ocurriera despues de que las ya sincronizadas tuvieran una carga superior al 30%. Como resultado de ello, durante más de 9 años de explotación de esta nueva automática de arranque y toma de cargas de las unidades no se ha presentado este fenómeno, lo que avala los resultados del presente trabajo.

