










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
El desarrollo del transporte y la industria automotriz en el pasado siglo y en lo que va del actual ha sido vertiginoso pero , por otra parte, este desarrollo impetuoso ha sido uno de los principales responsables de una de las mayores crisis económica y social de fines del pasado siglo y principios del actual debido a haber creado, por una parte una gran dependencia de los combustibles fósiles cuyas fuentes no son inagotables y, por otra parte, la contaminación ambiental producida por causa de las emisiones de anhídrido carbónico y otros gases contaminantes que han dado lugar al calentamiento global.
En la actualidad, prácticamente se ha alcanzado un límite a las posibles mejoras en eficiencia y disminución de emisiones contaminantes de los motores de combustión interna utilizados en el transporte moderno convencional. Esto hace prioritario desarrollar y aplicar a gran escala, otras fuentes de energías renovables y no contaminantes
El desarrollo y aplicación de los vehículos eléctricos (VE) es una de las más importantes medidas que pueden tomarse para contribuir a ir resolviendo este problema y es la principal dirección en que la que se orienta la industria automotriz moderna [1, 2, 3].
Como parte de la vinculación de la Universidad Tecnológica de la Habana a este lineamiento priorizado, está aprobado un proyecto nacional titulado Integración de la industria nacional en la electrificación del transporte ligero en Cuba. El trabajo que aquí se presenta se encuentra enmarcado dentro de una de las tareas de este proyecto que trata del diseño de un vehículo eléctrico (VE) ligero, con una alta integración de la industria nacional en el mismo.
Como cualquier trabajo de control de un accionamiento eléctrico, se comienza analizando el mecanismo a accionar definiendo claramente que tareas debe cumplir este accionamiento eléctrico para responder a las necesidades del mecanismo accionado.
Posteriormente, se describen las características constructivas de los motores de iman permanente interior y sus ventajas y desventajas en su aplicación a los VE.
El epígrafe siguiente está dedicado a explicar los sistemas de control utilizados en los accionamientos eléctricos y su actuación en los escenarios más frecuentes. Se describe brevemente el método de control de los motores sincrónicos de imanes permanentes denominado MTPA (Máximo Torque por Ampere) que es el utilizado actualmente en los carros eléctricos accionados por motores sincrónicos de imanes permanentes [4].
Se analiza el comportamiento transitorio de este sistema para diferentes posibles escenarios de operación del vehículo eléctrico.
Se simulan los diferentes posibles escenarios de operación, el modelo del motor sincrónico de imán permanente y el de su sistema de control y se analiza el comportamiento transitorio del motor en cada uno de los escenarios de operación.
Materiales y métodos
Requerimientos que el vehículo eléctrico impone a su accionamiento eléctrico [4]
Alta potencia específica que suele alcanzar 11,25kw/kg.
Amplio diapasón de control de velocidad del motor. Generalmente de un 25% -100% de la velocidad máxima, llegando a valores pequeños de torque con potencia constante, por lo que puede cumplir con el requisito de velocidad máxima durante un viaje por carretera.
Torque de arranque suficiente para satisfacer las demandas de arranque rápido, aceleración, ascenso y, arranque/parada frecuentes. Por lo general, el factor de sobrecarga del motor alcanza el valor de 3 a 4.
Respuesta de torque rápido. El sistema de conducción debe controlar el torque en estado estacionario y el torque de frenado de forma rápida y suave en todo tipo de rangos de velocidad. En el sistema de motores múltiples, los motores deben tener una alta capacidad de control, así como una buena respuesta tanto en estado estacionario como dinámico.
Buena adaptabilidad ambiental. Puede realizar un trabajo confiable en ambientes hostiles.
Alta tasa de recuperación de energía en frenado regenerativo.
Tener buenas características de eficiencia. Debe adquirir una eficiencia óptima en un rango de velocidad/torque más amplio, aumentar la distancia de conducción continua después de cargar una vez, por lo general debe adquirir una eficiencia del 85% -93% en la zona de conducción típica.
El accionamiento a desarrollar debe hacer operar al motor del VE en el primer y el segundo cuadrante. Se considera un solo sentido de rotación porque para dar marcha atrás es necesario parar el carro y volver a arrancar.
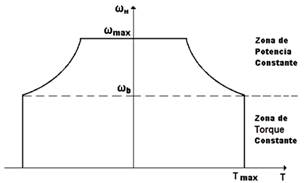
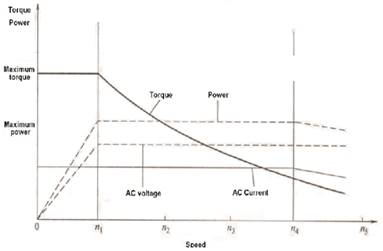
La característica mecánica del accionamiento debe ser como la mostrada en la figura 1 y, la variación, en todo su diapasón de operación, de las principales variables eléctricas y mecánicas del accionamiento aparece en la figura 2. [4]
Los VE comenzaron a adquirir cierta popularidad a fines de los años 80 y principio de los 90. Se propusieron entonces accionamientos con motores de corriente directa debido a que este motor es el que tiene mejores características desde el punto de vista del control [5]. Sus desventajas son su mayor costo, espacio ocupado y necesidad de mantenimiento. A fines del siglo pasado se comenzaron a construir VE accionados por motores asincrónicos jaula de ardilla, el más popular y robusto en aquel entonces. La extensa aplicación del control vectorial y el control directo del par en los motores asincrónicos [6, 7], que convierten, por software una máquina de CD en una de CA, motivaron que a partir de ese momento, se dejara de utilizar prácticamente el motor de CD y se sustituyera por uno de CA.
Primeramente, se utilizó el motor de jaula por sus conocidas ventajas [8], pero al mejorarse la calidad y disminuir los precios de los imanes permanentes se comenzó a introducir en la industria del transporte eléctrico el motor trifásico sincrónico de imanes permanentes el cual es más eficiente pues no tiene pérdidas en el rotor. Hoy en día existe una fuerte tendencia entre los fabricantes de VE a utilizar este tipo de motor [8].
Características constructivas del motor de imanes permanentes interiores
En el estator de la máquina se encuentra un enrollado trifásico similar al de todas las máquinas de CA. Este enrollado tiene el mismo número de polos que el rotor y produce un campo magnético giratorio a una velocidad sincrónica correspondiente a la frecuencia de la corriente que circula por el enrollado y al número de polos del motor.
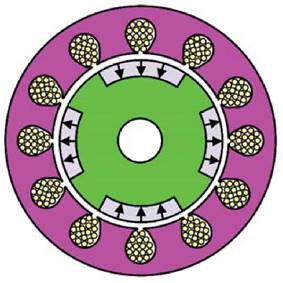
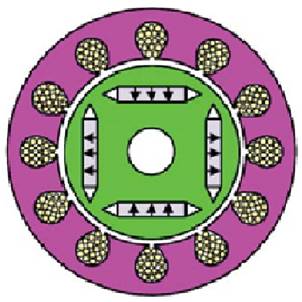
En dependencia de la ubicación de los imanes en el rotor existen dos tipos de motores de imán permanente, los de montaje superficial, llamados a veces erróneamente, motores de CD sin escobillas [6], en los cuales los imanes van montados en la superficie del rotor y los de imán permanente interior, los cuales son de dos tipos: de montaje superficial interno tal como se muestra en la figura 3, y de montaje radial externo, como se muestra en la figura 4. Desde el punto de vista de su modelo, control y características de operación son muy similares y son denominados de Imán Permanente Interior.
Estrategia de control del vehículo eléctrico [9, 10]
En la figura 5, se muestra el diagrama de bloques del sistema de control de un VE de forma muy general y resumida. El pedal y el conversor A/D son los elementos de entrada que introducen el comando o referencia. Mediante más o menos presión en el pedal el sistema recibe una señal proporcional a la velocidad deseada en el carro. La señal del pedal es analógica y puede estar entre 0 y 10 V o entre 4 mA y 20 mA. Debido a que el control del carro es digital, es necesario un conversor análogo digital.
El sensor de velocidad es el elemento encargado de leer y procesar una señal proporcional a la velocidad real del vehiculó. Puede ser un encoder que lee la velocidad contando el número de pulsos emitidos por un elemento rotatorio que puede dar, por ejemplo, un pulso por cada revolución del rotor. Si el conteo se lleva a cabo en un tiempo fijo, este número de pulsos es proporcional a la velocidad. Debido a que el encoder es un elemento adicional a situar en el carro y que tiene posibilidades de fallo, hace ya unos cuantos años se vienen utilizando también los denominados sistemas sensorless que leen velocidad a partir de lecturas de tensión, frecuencia y corriente. Pueden utilizarse también los elementos tacométricos de medición de velocidad propios del carro.
El detector de error es el simple algoritmo digital que calcula la diferencia entre la velocidad que el conductor del vehículo desea en un instante (expresada a través de la presión del pedal) y la velocidad real en cada momento. Esta diferencia se denomina error de velocidad. La salida de este elemento, después de limitada, se da como referencia a un lazo interno de control de corriente cuyo objetivo es aumentar la rapidez de respuesta del sistema de control de velocidad.
Modelo matemático del motor sincrónico de imán permanente interior [4, 5].
Las variables eléctricas a representar en el modelo son las corrientes, las tensiones y los flujos. El modelo utilizado es vectorial y los vectores de la variable x (puede ser corriente, tensión o flujo) se representan de forma vectorial mediante el denominado Vector de Park Gorev [4]: Vea ecuación (1).
 (1)
(1)
Aunque las corrientes y las tensiones en el motor son tres, una por cada fase, como el neutro no suele conectarse, se puede hacer una transformación de coordenadas que conviertan las tres variables en dos y los vectores se puedan representar en el plano tal como aparece en la figura 6. Las ecuaciones de transformación son: Vea ecuaciones (2a) y (2b).
 (2a)
(2a)
(2b)
Y las ecuaciones de transformación inversa son: Vea ecuaciones (3a), (3b) y (3c).
(3a)
 (3b)
(3b)
(3c)
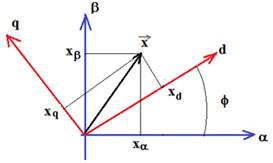

Como en toda máquina de polos salientes, en este motor la inductancia que “ve” el campo magnético del estator depende de la posición del rotor [3]. Por eso se define y se plantean las ecuaciones en otro sistema de coordenadas cuyo eje real coincide con el del polo y cuyo imaginario está 90o en adelanto tal como puede apreciarse en las figuras 7 y 6.
Se hace entonces la denominada Transformación de Park Gorev que consiste en llevar las ecuaciones de la máquina en los ejes αβo a un sistema de coordenadas que gira con el rotor a la velocidad sincrónica con un eje directo d y un eje transversal q. Las ecuaciones de transformación son [2, 3, 4]. Vea ecuaciones (4a) y (4b).
 (4a)
(4a)
(4b)
Y las ecuaciones de transformación inversa. Vea ecuaciones (5a) y (5b).
 (5a)
(5a)
(5b)
Las ecuaciones eléctricas del motor en el sistema de coordenadas sincrónico son. Vea ecuaciones (6a) y (6b).
 (6a)
(6a)
(6b)
Donde R S es la resistencia del enrollado del estator por fase, L d la inductancia de eje directo, L q la inductancia de eje transversal o en cuadratura, ω r la velocidad del rotor en radianes por segundo, φ ip el flujo por polo de los imanes en weber, p el número de pares de polos, u d y u q las tensiones de eje directo y transversal e i d y i q las corrientes de eje directo y transversal.
Por otra parte, la ecuación mecánica del modelo de cualquier motor es la siguiente [2, 3, 4]: Vea ecuación (7).
 (7)
(7)
En esta ecuaciónT em es el torque electromagnético que es función de las concatenaciones de flujo magnético y de las corrientes por los enrollados, T mec es el torque mecánico resistivo del mecanismo accionado y J t es a inercia total que es la suma de la del motor y la del mecanismo referida al eje del motor.
El torque electromagnético está dado por la ecuación (8):
 (8)
(8)
En este tipo de motor siempre se cumple que: Vea la ecuación (9).
 (9)
(9)
Por tanto, para que la máquina trabaje como motor en el primer cuadrante, i q tiene que ser positiva e i d negativa.
Estrategia de control MTPA
Modernamente, al trabajar en la zona de torque constante, se emplea una estrategia de control diferente denominada de Máximo Torque por Ampere (MTPA). La ecuación (10), del torque electromagnético producido por el motor es [2]:
 (10)
(10)
En esta ecuación, p es el número de pares de polos, L d y L q las inductancias de eje directo y transversal y ( ip el flujo de los imanes.
Como puede apreciarse, el mismo torque puede conseguirse con muchas combinaciones de componentes de corriente i x e i y, se selecciona entonces aquella que da lugar a la menor corriente de armadura. Esto aumenta la eficiencia y la utilización del motor y el accionamiento en general. El selector de flujo toma la forma que aparece en la figura 8, donde FG1 y FG2 son las funciones que se utilizan para el control MTPA.

Simulación del sistema de control del vehículo accionado por un motor de imanes permanentes
En la figura 9, se muestra el diagrama de bloques general del sistema de control a lazo cerrado del accionamiento.

En el bloque Referencia se encuentra la acción del conductor sobre el pedal, la cual se compara con el valor real de la velocidady da un error que se introduce a un regulador del tipo PI cuyas salidas son las corrientes Id e Iq que son las entradas al bloque del convertidor PWM [8] de la figura 8 donde se muestra el procesamiento de estas señales.
Escenarios de operación del carro eléctrico y sus modelos matemáticos
Se suponen los siguientes cuatro escenarios de operación:
Escenario 1. Arranque desde el reposo hasta la velocidad máxima de 130 km/hora en terreno plano.
Escenario 2. Arranque en terreno plano desde el reposo hasta un estado estacionario con una velocidad cercana a los 55 km/hora y, pasado cierto tiempo, subida de una pendiente de 5o.
Escenario 3. Arranque en terreno plano desde el reposo hasta un estado estacionario con una velocidad cercana a los 55 km/hora y, pasado cierto tiempo, bajada de una pendiente de 5o.
Escenario 4. Frenado en terreno plano a partir de los 55 km/hora hasta detener el carro.
En todos los casos, se supone que el conductor oprime el pedal imprimiendo cierta variación en rampa desde la referencia de velocidad hasta llegar al valor deseado y, lo mantiene en esa posición.
Para poder representar los diferentes escenarios es necesario acudir al modelo de la carga mecánica (en estado estacionario) que representa el carro para el motor que responde a la ecuación (11):
 (11)
(11)
En esta ecuación (11), r es el radio equivalente de las ruedas, donde C d es el coeficiente de resistencia aerodinámica, A es la superficie frontal del vehículo, p es la densidad del aire, v la velocidad lineal del vehículo, fr es el coeficiente de rozamiento con el suelo, m la masa total del carro, η el rendimiento mecánico de la transmisión, g la aceleración de la gravedad ,θ la pendiente de la carretera y G la relación de transmisión.
Resultados
Se seleccionó el carro cuyos datos aparecen en la tabla 1, accionado por el motor con los datos de la tabla 2.
Tabla 1 Datos del carro
| Peso total en kg a plena carga incluyendo las baterías | 2650 |
| Radio de la rueda en pulgadas | 14,2 |
| Coeficiente de fricción con la carretera | 0,0267 |
| Coeficiente de resistencia del aire | 0,3 |
| Área expuesta al viento en m2 | 1,75 |
| Eficiencia supuesta para el motor en % | 94 |
| Densidad del aire en kg/m3 | 1,205 |
| Gradiente de la carretera | 100 |
| Velocidad máxima en km/hora | 130 |
Tabla 2 Datos del motor
| Potencia nominal en kW | 45 |
| Tensión nominal de línea en V | 154 |
| Velocidad nominal en rpm | 1800 |
| Corriente nominal en A | 207 |
| Corriente máxima en A | 350 |
| Frecuencia nominal en Hz | 60 |
| No de polos | 4 |
| Resistencia del estator en ohms | 0,013 |
| Concatenaciones de flujo del imán en Wb | 0,217 |
| Inductancia de eje transversl en H | 0,0013 |
| Inductancia de eje directo en H | 0,00066 |
Los resultados obtenidos para los diferentes escenarios se muestran a continuación. La primera respuesta que aparece es la de la velocidad de referencia y la velocidad real. Seguidamente la corriente de fase y, finalmente el torque del motor y el de la carga.
Resultados obtenidos en el escenario1

Se observan en las figuras 10, 11 y 12. De la observación de estos resultados se pueden hacer los siguientes comentarios:
Aunque el conductor del vehículo demora solo unos 6 segundos en pisar el pedal hasta el fondo, la velocidad máxima solo se alcanza realmente a los 22 segundos debido a la gran inercia del carro
La corriente del motor posee armónicos que disminuyen en algo la eficiencia del accionamiento. Para mejorar la calidad de la onda sería necesario aumentar la frecuencia de conmutación en el inversor que alimenta al motor pero esto aumenta las pérdidas en dicho inversor y, a la larga, no se consigue el incremento en eficiencia deseado.
Durante todo el proceso de arranque el torque electromagnético del motor es mucho mayor que el torque de la carga. Esto garantiza la rápida aceleración del vehículo.
Resultados obtenidos en el escenario2
Corresponden a las figuras 13, 14 y 15.
Rápidamente se alcanza una velocidad estable debido a la aplicación de un torque motor mucho mayor que el de la carga y una corriente también elevada. Esta velocidad se mantiene casi constante a pesar de la subida de la pendiente. Esto se debe a la operación del sistema de control a lazo cerrado. Se observa un aumento grande del torque motor al comenzar a subir la pendiente ya que ha aumentado el torque de la carga. Esto es lo que mantiene la velocidad prácticamente constante.
Resultados obtenidos en el escenario3
Se pueden apreciaren las figuras 16, 17 y 18


La diferencia de este escenario con el anterior es que la pendiente es negativa, o sea, el carro se encuentra ahora con una bajada y el motor funciona como generador, en lo que se denomina frenado regenerativo. Esto se aprecia en el valor negativo de torque de la figura 18. Pueden definirse tres períodos:
Resultados obtenidos en el escenario 4
Corresponden a la detención del vehículo y se observan en las figuras 19, 20 y 21.
Como puede apreciarse en la figura 19, la orden de detención está dada mediante una señal en rampa descendente que provoca la aparición de un torque contrario a la rotación provocando un frenado regenerativo que provoca la detención del vehículo entregando energía para cargar la batería a expensas de la energíe cinética de las masas rotatorias (ver figura 20).
Es interesante observar la figura 19, en la que puede apreciarse que la frecuencia de la corriente por las tres fases va disminyendo rápidamente con el objetivo de disminuir la velocidad.
Conclusiones
En este artículo se ha analizado el comportamiento transitorio del motor sincrónico de imanes permanentes accionando un vehículo eléctrico, una de sus principales aplicaciones. Observando la calidad de la respuesta transitoria se comprende una de las razones por la cual este motor es el más utilizado en la actualidad en el accionamiento de los vehículos eléctricos. Se supusieron cuatro escenarios de operación típicos en los cuales se puede apreciar la operación del motor sincrónico de imanes permanentes tanto como motor así como generador en condición de frenado regenerativo. También se observa el paso de la operación a torque constante, utilizable sobre todo en el arranque, a la operación a potencia constante característica de las velocidades más alta.

