










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
En los estudios y análisis de sistemas de potencia es necesario modelar todas sus componentes, desde la generación hasta el consumo, pasando por los transformadores y líneas de transmisión. La parte más complicada y difícil de representar es, precisamente, el consumo, o sea, las cargas. Esto se debe a que cualquier barra de carga está compuesta por un gran número de dispositivos tales como: lámparas incandescentes y fluorescentes, aparatos de refrigeración y climatización, motores, hornos, y otros. La composición exacta de las cargas es difícil de determinar debido a que, además de su complejidad, puede cambiar en dependencia de muchos factores, como la hora del día, la estación del año, y hasta por aspectos económicos y sociales [1, 2].
La elevada incidencia de los motores asíncronos trifásicos en el consumo energético mundial, el cual puede estar entre el 60% y el 75% del consumo total, aspecto este que depende del grado de desarrollo de un país, y su influencia en el funcionamiento de los sistemas eléctricos hace necesario el desarrollo de modelos que permitan su análisis de forma efectiva. El modelo que se utilice debe ser, además, lo más adaptable posible a los principales softwares utilizados para los estudios y análisis de redes eléctricas, tales como el DigSilent power factory, SimPowerSystem, PSX, y otros [1, 2]. En cualquier industria existe una gran cantidad de máquinas eléctricas que, por lo general, se encuentran ubicadas en Centros de Control de Motores (CCM) en los cuales todos los motores están conectados a una misma barra.
Resultaría muy engorroso en el análisis de una red el representar cada uno de los motores por su modelo independiente [3, 4, 5]. Es posible disminuir la cantidad de modelos de motores a utilizar si todos los que están conectados a una misma barra pudieran agruparse conformando un solo motor equivalente. Este proceso se denomina Agregación de Motores y al resultado obtenido Motor Agregado o Equivalente. [6, 7, 8]. En [9], se presenta un nuevo modelo de circuito equivalente para motores de inducción de media tensión y gran potencia así como una metodología para la obtención de los parámetros de dicho circuito, teniendo la ventaja de permitir el cálculo eléctrico de todas las pérdidas de potencia y la realización del balance de potencia. Queda demostrada su validez al ser aplicado a un caso de estudio.
En [10], se presenta un nuevo modelo de estado estacionario de motor asincrónico trifásico con la misma configuración de los modelos ZIP de las cargas [2], utilizados en los principales softwares de análisis de sistemas de potencia existentes para su uso en estudios de sistemas eléctricos de potencia que permite obtener la respuesta de la demanda de potencia activa y reactiva en función de la tensión y la frecuencia. La contribución del modelo es la integración en el modelo del motor de las características de la carga mecánica que ellos pueden accionar, ya sea carga de torque constante o variable. El modelo se evaluó para los dos tipos de carga mecánica, en una amplia gama de valores de tensión y frecuencia, así como con cuatro factores de carga acoplada a los motores y se demostró que para la frecuencia nominal y variación de tensión, el tipo de carga no influye en el comportamiento de las potencias y que la potencia reactiva, como era de esperar, es muy sensible a la variación de tensión.
Los resultados demostraron la factibilidad de considerar el modelo propuesto en los softwares de simulación de sistemas eléctricos de potencia. En [11], a partir de los modelos presentados en [9, 10], se propone un modelo universal del motor asincrónico y su carga, con sus parámetros en por unidad basado en la relación entre la potencia activa y reactiva del motor y la desviación de tensión y frecuencia. Puede aplicarse a cualquier motor de propósito general y resulta muy útil a la hora de representar estos motores en estudios de sistemas eléctricos de potencia. Los parámetros de ese modelo universal fueron obtenidos a partir de un análisis estadístico realizado sobre 140 motores de diferentes clasificaciones. Los resultados fueron validados comparándolos con los obtenidos a partir de la solución del circuito equivalente, siendo los errores inferiores al 6%. Se analiza en [9, 10, 11, 12], el comportamiento de los modelos ante diferentes condiciones de operación.
A partir de la utilización de esos modelos independientes en este trabajo se explica y demuestra el proceso de agregación de motores llegándose a proponer un modelo universal para el uso de motores agregados en estudios de sistemas eléctricos de potencia.
Materiales y métodos
Metodología propuesta para la obtención de los parámetros del agregado
Luego de analizar los trabajos previos sobre la agrupación de motores eléctricos [3, 4, 5, 6, 7, 8], en este artículo se propone asumir las siguientes suposiciones:
La potencia activa de entrada del motor agregado es igual a la potencia activa total de entrada de los motores considerados.
La potencia reactiva de entrada del motor agregado es igual a la potencia reactiva total de entrada de los motores considerados.
La potencia electromagnética del motor agregado es igual a la potencia electromagnética total de los motores considerados.
Las pérdidas en el devanado del rotor del motor agregado son igual a las pérdidas totales en los devanados de los rotores en los motores considerados.
La potencia activa de salida del motor agregado es igual a la potencia activa de salida total de los motores considerados.
La carga aplicada al motor agregado es igual a la carga total aplicada a los motores considerados.
La energía cinética contenida en el motor agregado es igual al total de la energía cinética contenida en los motores considerados.
El número de polos del motor agregado es igual al número de polos del motor de mayor potencia, dentro de los considerados.
Los valores nominales de tensión y frecuencia del agregado son los mismos que los de los motores componentes.
No se tiene en cuenta la alteración por saturación magnética.
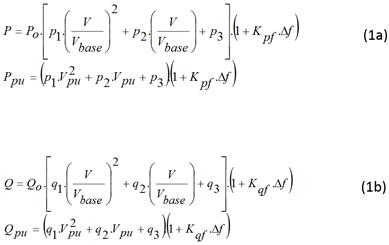
A partir de estas suposiciones es posible obtener los datos nominales del motor agregado, o sea: potencia nominal, velocidad sincrónica, velocidad nominal, corriente nominal, rendimiento nominal, factor de potencia nominal y torque máximo. Con los datos nominales del motor agregado se determinan los parámetros del circuito equivalente exacto del agregado aplicando el método explicado en [9]. Con los parámetros del circuito equivalente, y aplicando el método explicado en estas mismas referencias [9, 10, 11], se calculan los parámetros del modelo agregado, cuyas ecuaciones son las siguientes (1a, 1b ):
 (1)
(1)
donde:
P o y Q o |
son los valores de potencia activa y reactiva a tensión y frecuencia nominales |
V base |
la tensión base (generalmente coincide con la nominal) |
p1, p2, p3, q1, q2, q3, K pf y K qf |
son los parámetros del modelo, y las variables con subíndice pu son las expresadas en por unidad. |
Descripción de los ejemplos de aplicación
Como ejemplo de aplicación del método propuesto, y para demostrar su validez, se seleccionaron tres agregados con las siguientes características. En cada caso se presentan los datos nominales de los motores individuales que componen el agregado, los resultados obtenidos al calcular los datos nominales del agregado de dichos motores, así como los parámetros del circuito equivalente obtenido para cada motor agregado. En cada caso: Pn es la potencia nominal, en kW. Vn la tensión nominal, en V. Nn la velocidad nominal, en rpm. In la corriente nominal, en A. Efn el rendimiento o eficiencia nominal, en %. fpn el factor de potencia nominal, y Tmax el torque máximo, en pu del torque nominal.
Ejemplo de aplicación 1
Agregado 1- Un centro de control de motores de la refinería de petróleo Ñico López de la provincia Habana, Cuba, con 5 motores de potencias comprendidas entre 15 kW y 37 kW y tensión de 440 V. Es un agregado con motores similares de baja tensión y 60 Hz. (Ver tablas 1, 2 y 3).
Tabla 1 Datos nominales de los motores que componen el agregado 1
| Código | Pn (kW) | Vn (V) | Nn (rpm) | In (A) | Efn (%) | fpn (pu) | Tmax (pu) |
|---|---|---|---|---|---|---|---|
| 115 B | 15 | 440 | 3534 | 24 | 92,25 | 0,89 | 3,0 |
| 116 A | 22 | 440 | 3500 | 37,1 | 91,7 | 0,85 | 3,1 |
| 103 A | 15 | 440 | 3520 | 22,25 | 91 | 0,93 | 3,0 |
| 108 A | 22 | 440 | 3560 | 36 | 89 | 0,90 | 3,1 |
| 109 B | 37 | 440 | 3540 | 60,5 | 87,3 | 0,92 | 3,0 |
| 113 B | 75 | 440 | 3570 | 118,5 | 91 | 0,9 | 3,0 |
Tabla 2 Datos nominales del agregado del ejemplo de aplicación 1
| Dato nominal | Valor |
|---|---|
| Tensión nominal, en V | 440 |
| Potencia nominal, en kW | 186 |
| Corriente nominal, en A | 298 |
| Velocidad nominal, en rpm | 3547 |
| Rendimiento nominal, en % | 90,73 |
| Factor de potencia nominal, en pu | 0,9 |
| Par máximo, en pu | 3,05 |
Tabla 3 Parámetros del circuito equivalente del motor agregado del ejemplo de aplicación 1
| Parámetro | Valor |
|---|---|
| Resistencia del estator, en Ohm | 0,0106 |
| Resistencia del rotor, en Ohm | 0,0215 |
| Reactancia de dispersión total, en Ohm | 0,592 |
| Resistencia de las pérdidas adicionales, en Ohm | 0,0276 |
| Reactancia magnetizante, en Ohm | 5,3 |
| Resistencia de pérdidas constantes, en Ohm | 250 |
Ejemplo de aplicación 2
Agregado 2- Un centro de control de motores de la Empresa Niquelífera Che Guevara de Moa, provincia Holguín, Cuba, formado por 6 motores de 4 kW, uno de 17 kW, uno de 110 kW, y otro de 160 kW. Es un agregado con varios motores iguales de baja potencia y dos motores de media potencia, todos de baja tensión y 60 Hz. (Ver tablas 4, 5 y 6).
Tabla 4 Datos nominales de los motores del agregado 2
| Motor | Pn (kW) | Vn (V) | In (A) | Nn (rev/min) | fpn (pu) | Rend (pu) | Tmax/Tn |
|---|---|---|---|---|---|---|---|
| MP1 | 4 | 440 | 7,8 | 1700 | 0,81 | 0,82 | 2 |
| MP2 | 4 | 440 | 7,8 | 1700 | 0,81 | 0,82 | 2 |
| MP3 | 4 | 440 | 7,8 | 1700 | 0,81 | 0,82 | 2 |
| MP4 | 17 | 440 | 28,0 | 1764 | 0,87 | 0,89 | 2 |
| MP5 | 160 | 440 | 254 | 1764 | 0,90 | 0,92 | 2 |
| MP6 | 110 | 440 | 192 | 1764 | 0,81 | 0,93 | 2 |
Tabla 5 Datos nominales del agregado del ejemplo de aplicación 2
| Dato nominal | Valor |
|---|---|
| Tensión nominal, en V | 440 |
| Potencia nominal, en kW | 299 |
| Corriente nominal, en A | 495,6 |
| Velocidad nominal, en rpm | 1761 |
| Rendimiento nominal, en % | 95,6 |
| Factor de potencia nominal, en pu | 0,8625 |
| Par máximo, en pu | 2 |
Tabla 6 Parámetros del circuito equivalente del motor agregado del ejemplo de aplicación 2
| Parámetro | Valor |
|---|---|
| Resistencia del estator, en Ohm | 0,0124 |
| Resistencia del rotor, en Ohm | 0,0139 |
| Reactancia de dispersión total, en Ohm | 0,1587 |
| Resistencia de las pérdidas adicionales, en Ohm | 0,0076 |
| Reactancia magnetizante, en Ohm | 1,8 |
| Resistencia de pérdidas constantes, en Ohm | 33,67 |
Ejemplo de aplicación 3
Agregado 3- Un centro de control de motores supuesto por los autores, con 5 motores de 3000 V y 50 Hz, todos de gran potencia. (Ver tablas 7, 8 y 9).
Tabla 7 Datos nominales de los motores que componen el agregado del ejemplo de aplicación 3
| Motor | Pn (kW) | Vn (V) | In (A) | Nn (rev/min) | fpn (pu) | Rend (pu) | Tmax/Tn |
|---|---|---|---|---|---|---|---|
| MT 1 | 500 | 3000 | 120 | 986 | 0,84 | 0,955 | 1,8 |
| MT 2 | 1000 | 3000 | 245 | 992 | 0,81 | 0,963 | 2,1 |
| MT 3 | 315 | 3000 | 77 | 738 | 0,83 | 0,945 | 1,8 |
| MT 4 | 800 | 3000 | 188 | 741 | 0,86 | 0,958 | 1,9 |
| MT 5 | 1600 | 3000 | 367 | 742 | 0,87 | 0,964 | 1,9 |
Tabla 8 Datos nominales del agregado del ejemplo de aplicación 3
| Dato nominal | Valor |
|---|---|
| Tensión nominal, en V | 3000 |
| Potencia nominal, en kW | 4215 |
| Corriente nominal, en A | 996 |
| Velocidad nominal, en rpm | 742 |
| Rendimiento nominal, en % | 96,01 |
| Factor de potencia nominal, en pu | 0,8475 |
| Par máximo, en pu | 2,16 |
Tabla 9 Parámetros del circuito equivalente del motor agregado del ejemplo de aplicación 3
| Parámetro | Valor |
|---|---|
| Resistencia del estator, en □ | 0,0106 |
| Resistencia del rotor, en □ | 0,0215 |
| Reactancia de dispersión total, en □ | 0,592 |
| Resistencia de las pérdidas adicionales, en □ | 0,0276 |
| Reactancia magnetizante, en □ | 5,3 |
| Resistencia de pérdidas constantes, en □ | 250 |
Resultados y(o) discusión
Influencia del tipo de motores que componen el agregado en el valor de los parámetros
Para analizar la influencia del tipo de motor se determinaron los parámetros del modelo en los tres casos de estudio, determinando su valor promedio y su dispersión. Se supuso una carga del 75% de la nominal. Los resultados para una carga de torque constante se muestran en la tabla 10 y para una carga de torque variable en la tabla 11.
Tabla 10 Valores de los parámetros de los agregados y su valor promedio para una carga de torque constante
| TORQUE CTE | p1 | p2 | p3 | q1 | q2 | q3 | Kpf | Kqf |
|---|---|---|---|---|---|---|---|---|
| AGREGADO 1 | -0,259 | 0,736 | 0,522 | 1,35 | -1,68 | 1,33 | 0,903 | -0,0336 |
| AGREGADO 2 | -0,307 | 0,844 | 0,463 | 1,32 | -1,60 | 1,28 | 0,892 | -0,691 |
| AGREGADO 3 | -0,313 | 0,810 | 0,502 | 1,27 | -1,35 | 1,08 | 0,852 | -0,186 |
| Valor Promedio | -0.293 | 0,797 | 0,496 | 1,31 | -1,543 | 1,230 | 0,882 | -0,304 |
| Desviación Estándar | 0.0296 | 0,0552 | 0,030 | 0,040 | 0,172 | 0,132 | 0,027 | 0,344 |
Tabla 11 Valores de los parámetros de los agregados y su valor promedio para una carga de torque variable
| TORQUE VAR | p1 | p2 | p3 | q1 | q2 | q3 | Kpf | Kqf |
|---|---|---|---|---|---|---|---|---|
| AGREGADO 1 | -0,250 | 0,749 | 0,501 | 1,24 | -1,22 | 0,977 | 2,58 | 0,78 |
| AGREGADO 2 | -0,362 | 1,03 | 0,333 | 1,18 | -1,23 | 1,05 | 2,67 | 0,60 |
| AGREGADO 3 | -0,318 | 0,846 | 0,472 | 1,21 | -1,12 | 0,915 | 2,62 | 0,588 |
| Valor Promedio | -0,310 | 0,875 | 0,435 | 1,21 | -1.19 | 0,981 | 2,62 | 0,657 |
| Desviación Estándar | 0,056 | 0,143 | 0,098 | 0,03 | 0,061 | 0,068 | 0,045 | 0,11 |
Como puede apreciarse observando las tablas, los valores de los parámetros relacionados con las variaciones de la tensión (coeficientes p y q) prácticamente no dependen del tipo de motor en cuanto a potencia y número de polos, y tampoco dependen del tipo de carga, si es de torque constante o de torque variable. Los valores de los parámetros relacionados con las variaciones de la frecuencia sí dependen fuertemente del tipo de carga. Los relacionados con la potencia activa tienen un valor promedio igual a 0,882 para cargas de torque constante e igual a 2,62 para cargas de torque variable.
Influencia de la magnitud y tipo de carga mecánica
En este epígrafe se analizan, comparativamente, los valores de los parámetros del modelo para torque constante y para torque variable, mostrando los parámetros correspondientes a cuatro estados de carga: carga nominal, un 75% de la carga nominal, un 50% de la carga nominal y un 25% de la carga nominal.
En la tabla 12, se muestran los valores promedio de los parámetros para los tres agregados en el caso de una carga de torque constante, y en la tabla 13, los valores promedio de los parámetros para los tres agregados en el caso de una carga de torque variable.
Tabla 12 Valores promedio de los parámetros de los tres agregados para carga variable de torque constante
| Kc | ||||
|---|---|---|---|---|
| 1 | 0,75 | 0,50 | 0,25 | |
| p1med | -0,4933 | -0,310 | -0,1403 | 0,0087 |
| p2med | 1,2733 | 0,8247 | 0,4330 | 0,1423 |
| p3med | 0,2207 | 0,4850 | 0,708 | 0,8493 |
| q1med | 1,323 | 1,337 | 1,233 | 1,080 |
| q2med | -1,913 | -1,553 | -0,9307 | -0,288 |
| q3med | 1,590 | 1,220 | 0,701 | 0,207 |
| Kpfmed | 0,7703 | 0,8443 | 0,8940 | 0,8970 |
| Kqfmed | 0,306 | -0,0913 | -0,7463 | -0,8653 |
Tabla 13 Valores promedio de los parámetros de los tres agregados para carga variable de torque variable
| Kc | ||||
|---|---|---|---|---|
| 1 | 0,75 | 0,50 | 0,25 | |
| p1med | -0,4640 | -0,3160 | -0,1640 | -0,0055 |
| p2med | 1,2680 | 0,8880 | 0,5223 | 0,1987 |
| p3med | 0,1947 | 0,4263 | 0,6423 | 0,8070 |
| q1med | 1,1600 | 1,2067 | 1,1633 | 1,0600 |
| q2med | -1,4267 | -1,1967 | -0,7490 | -0,2317 |
| q3med | 1,2700 | 0,9893 | 0,5847 | 0,1710 |
| Kpfmed | 2,3100 | 2,5100 | 2,6667 | 2,7233 |
| Kqfmed | 1,7597 | 1,0203 | 0,1381 | -0,6653 |
Los valores de los parámetros en los dos casos, son muy similares y muy similares a los de los parámetros de los motores individuales expuestos en las referencias [9, 10].
En las tablas 12 y 13, se muestran los valores promedios de los parámetros en función del coeficiente de carga, definido como la relación de la potencia real en el eje y la potencia nominal. Debido a la imposibilidad de medir la potencia de salida real del agregado se define el coeficiente de carga como: vea ecuación (2)
 (2)
(2)
Donde:
P en |
es la potencia de entrada del agregado, que se lee en la pizarra general del centro de control de motores (CCM) |
P en.n |
la potencia nominal de entrada del agregado que es igual a la suma de las potencias nominales de todos los motores que componen el agregado. |
Como puede observarse, los valores de los parámetros dependen fuertemente de la magnitud de la carga y la dependencia es prácticamente la misma para los dos tipos de carga, siendo independiente del número de polos del motor, de su potencia nominal y del tipo de carga. Esto se aprecia fácilmente a través de las figuras 1 y 2, donde puede verse la dependencia de los parámetros con la carga, expresada mediante el factor de carga. En cuanto a los parámetros que tienen que ver con la frecuencia, el más importante, o sea, K pf , que relaciona la variación de la potencia activa con la variación de la frecuencia, depende del tipo de carga. Para cargas de torque constante está entre 0,85 y 0,92, y puede suponerse igual a 0,9. Para cargas de torque variable está entre 2,5 y 2,7, y puede suponerse igual a 2,6.
La variación de la potencia reactiva, a través del coeficiente Kqf es muy complicada y, por otra parte, no es de mucho interés en los análisis de sistemas de potencia.
Fig. 1 Valores de los parámetros que tienen que ver con la variación de la potencia activa con la tensión
Fig. 2 Valores de los parámetros que tienen que ver con la variación de la potencia reactiva con la tensión
Parámetros del modelo agregado universal.
Las ecuaciones (3a, 3b, 3c); (4a, 4b, 4c) y (5a, 5b), de estos parámetros constituyen el Modelo Universal del agregado que se busca como objetivo de este trabajo:
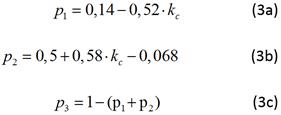 (3)
(3)
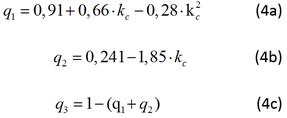 (4)
(4)
Donde:
Y |
en cuanto al parámetro de variación de frecuencia: Para las cargas de par constante. Ver ecuación (5a). Para las cargas de par variable. Ver ecuación (5b) |
 (5)
(5)
La variación de la potencia reactiva con la frecuencia es de poco interés en los estudios de sistemas de potencia. Por tanto, K qf no se considera.
Conclusiones
Se utilizó una metodología para determinar los valores nominales del motor agregado que se basa en aplicar los siguientes pasos:
Determinar los datos nominales del agregado, a partir de los correspondientes a los motores que lo conforman.
A partir de los datos nominales, identificar los parámetros del circuito equivalente del agregado por el mismo método utilizado en el caso de los motores individuales.
Se comprobó que los parámetros del modelo del motor agregado son similares a los parámetros de los motores que lo componen y a los parámetros de los motores individuales que aparecen [9]. Por tanto, pueden utilizarse las mismas ecuaciones universales, determinando previamente el estado de carga Kc

