










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería Electrónica, Automática y Comunicaciones
versión On-line ISSN 1815-5928
EAC vol.34 no.2 La Habana mayo-ago. 2013
ARTICULO ORIGINAL
Usando LABVIEW para medir el patrón de directividad de un arreglo de micrófonos.
Using LabVIEW for Measuring the Directivity Pattern of a Microphone Array
MSc. Seriosha Rodríguez Hernández.
Centro de Investigación y Desarrollo Técnico del MININT, La Habana, Cuba, cidt@mn.mn.co.cu.
RESUMEN
Este trabajo aborda los detalles de la implementación de un set de instrumentos que combina instrumentos tradicionales y virtuales con el propósito de medir el patrón de directividad de un arreglo de micrófonos. El set de instrumentos también involucra una cámara anecoica para simular las condiciones de propagación en campo libre. El proceso de medición de los patrones de directividad y el registro de los resultados son ejecutados de forma automática. Los resultados son salvados por igual en formato de hoja de cálculo y formato de imagen, lo cual proporciona flexibilidad para el pos-procesamiento y la publicación de los mismos. El operador del sistema puede ver en tiempo real el comportamiento del sistema en el monitor de una computadora a través de varios indicadores gráficos. El sistema permite obtener patrones de directividad con precisión de un grado. El lector también podrá apreciar los patrones de directividad obtenidos de varias mediciones reales llevadas a cabo con el set de instrumentos propuesto y su comparación con los resultados teóricos esperados. Todos los resultados mostrados fueron obtenidos usando como dispositivo bajo prueba un arreglo lineal uniforme de ocho micrófonos.
Palabras clave: LabVIEW, instrumento virtual, arreglo de micrófonos, patrón de directividad, mediciones acústicas.
ABSTRACT
This work is concerned with the implementation of a measurement instrumentation set that combines traditional and virtual instruments for measuring the directivity pattern of a microphone array. The instrumentation set also involves an anechoic chamber that allows the simulation of free field propagation conditions. The system automatically performs the measurement process and logs the results. The results are saved in both, spreadsheet and image format files, giving flexibility for post-processing and publishing. The operator can see, by mean of graphical indicators on a computer screen, the real time behavior of the measurement process. The system allows obtaining directivity patterns with one degree of precision. Also the reader will be able to appreciate the directivity patterns obtained from a group of measurements carried out with the proposed instrumentation set and the comparison of actual and expected theoretical results. All the results were obtained using a linear uniform array with eight microphones as device under test.
Key words: LabVIEW, virtual instrument, microphone array, directivity pattern, acoustic measurements.
INTRODUCCION
Para reconstruir una señal acústica que se propaga sobre todo el espacio y el tiempo existen dos vías [1]:
· Muestrear temporalmente la señal en una posición espacial, durante un tiempo lo suficientemente largo. A este enfoque se le denomina procesamiento temporal.
· Muestrear la señal en varios puntos del espacio simultáneamente, en un volumen lo suficientemente grande. A este enfoque se le denomina procesamiento espacial.
La combinación de ambos métodos se denomina procesamiento espacio-temporal de señales y, sin dudas, acceder a la información disponible en ambas dimensiones, espacio y tiempo, permite obtener informaciones que ninguno de los dos enfoques por separado puede aportar.
A su vez, el procesamiento espacio-temporal de las ondas sonoras requiere del uso de los llamados arreglos de micrófonos, que son conjuntos de sensores acústicos distribuidos según una geometría conocida.
El uso combinado de arreglos de micrófonos y técnicas de procesamiento espacio-temporal de señales permite dar una respuesta superior a problemas clásicos tales como: la reducción de ruido, la reducción de eco, la de-reverberación, la localización de una fuente, la estimación del número de fuentes y la separación de fuentes [2].
Un arreglo de micrófonos puede ser visto como una «apertura pasiva» que recibe ondas que se propagan. La forma propia en que una apertura captura las ondas se conoce como «respuesta de la apertura», la cual es, por naturaleza, inherentemente direccional. Esto se debe a que la cantidad de señal «vista» varía con la dirección de propagación de las ondas. La respuesta de la apertura, expresada como una función de la frecuencia y la dirección de arribo de la onda, se conoce como «patrón de directividad» o «patrón de haz» [1]. El patrón de directividad es, por consiguiente, una característica de gran importancia. Por tanto, las personas vinculadas al diseño de arreglos de micrófonos requieren poder medir su comportamiento y saber si se ajusta al diseño preconcebido.
Este artículo muestra una forma práctica de medir el patrón de directividad de un arreglo de micrófonos empleando para ello un set de instrumentos y equipos que vincula instrumentos tradicionales con instrumentos virtuales e incluye una cámara acústica semi-anecoica.
El artículo está organizado de la siguiente manera: Primero, son abordados aspectos teóricos y definiciones sobre los patrones de directividad y las condiciones necesarias para su medición. A continuación, son expuestos varios aspectos del set de instrumentos donde se incluyen: la lista de equipos e instrumentos, su esquema de interconexión, el algoritmo de ejecución de las mediciones y el algoritmo de ejecución del instrumento virtual. Después son presentados los resultados, de forma comparativa con los resultados esperados. Por último, son expuestas las conclusiones y recomendaciones para trabajos futuros.
ASPECTOS TEÓRICOS.
El sonido es cualquier variación de presión (en el aire, el agua u otro medio), que el oído humano puede detectar [3], y cuando hablamos de variaciones de presión en el aire, es apropiado pensar en un campo vectorial de ondas acústicas. Los campos acústicos reales son, por regla general, no homogéneos, introducen pérdidas y dispersión y son altamente no estacionarios.
Por tanto, desarrollar expresiones que describan la propagación de las ondas sonoras, requiere adoptar las siguientes aproximaciones: el medio de propagación es homogéneo y no produce dispersión ni introduce pérdidas. Con estas suposiciones, la propagación puede ser descrita a través de la conocida ecuación de onda [4], donde la presión (s) es una función de la posición de observación (r = [x, y, z]), y el instante de observación (t). (ecuación 1)

donde:
s: Presión sonora.
c: Velocidad de propagación del sonido (en el aire H» 340m/s@15°C).
t: Instante de tiempo de observación.
r: Vector de coordenadas del punto de observación r=[xr yr zr].
Ñ: Operador Laplaciano.
Si también consideramos que el punto de observación se encuentra en el campo lejano de la fuente de sonido y que esta emite una onda monocromática, entonces podemos expresar la ecuación de onda a través de su conocida solución para una onda plana monocromática [1, 4]: (ecuación 2)

donde:
A: Amplitud de la onda.
w: Frecuencia angular de la onda w=2pf.
k: Vector de número de onda. Indica la velocidad y dirección de la onda que se propaga.
Considerando la zona donde es observada la señal como una apertura continua que ocupa un volumen infinitesimal y tiene una respuesta espacio-temporal al impulso h(r, t-t), es posible definir la respuesta de la apertura como [1, 4]: (ecuación 3)
donde:
X(r,f): Transformada de Fourier de x(r,t).
H(r,f): Transformada de Fourier de h(r, t-t).
El patrón de directividad de una apertura continua puede expresarse a través de la transformada de Fourier tridimensional de la respuesta de la apertura [1, 4], o sea: (ecuación 4)

donde:
a=1/l[sinqcosf sinqsinf cosq]
l: Longitud de la onda. l=c/f.
q, f: Angulos vertical y horizontal de la dirección de arribo de la onda.
Esta expresión general puede ser simplificada para el caso de una apertura lineal, o sea, una apertura que se extiende a lo largo del eje x, quedando de la siguiente forma:(ecuación 5)

donde:
L: Longitud de la apertura.
Capturar las ondas sonoras que inciden sobre la todos los puntos de la apertura continua resulta prácticamente imposible. Sin embargo, podemos decir que un arreglo de micrófonos es una versión discretizada de la apertura continua, cuya respuesta se aproxima a la respuesta de la apertura continúa equivalente (ver figura 1). Basándonos en esto, podemos escribir la expresión general del patrón de directividad del arreglo como la superposición de las respuestas de todos los elementos del arreglo: (ecuación 6)
donde:
N: Cantidad de sensores del arreglo.
n: Indice de los elementos del arreglo.
Wn(f): Ponderación de amplitud y fase del elemento n.
En(a,f): Respuesta de frecuencia del elemento n.
La expresión general del patrón de directividad también se simplifica considerablemente para el caso de un arreglo lineal de elementos uniformemente espaciados. Por ello, fue seleccionada esta geometría para diseñar un arreglo que permita comprobar la efectividad del set de mediciones. El dispositivo bajo prueba (DBP), como lo denominaremos en lo adelante, consta de 8 micrófonos espaciados a una distancia de 4cm (ver figura 2), por lo que, la longitud efectiva del arreglo (L) es de 0.32m.

La figura 1 muestra los patrones de directividad horizontal (q=90°, 0°<f<90°) de la apertura continua equivalente (rojo) y el DBP (negro).
Todas las expresiones anteriores fueron deducidas para una onda plana monocromática, por tanto, el DBP debe ser colocado a una distancia de la fuente (d), que garantice la condición de campo lejano. Para tener certeza de que nos encontramos en el campo lejano de la fuente deben ser satisfechas las siguientes condiciones [1,11]: (ecuación 7 , 8 y 9)

Donde:
>>: Mucho mayor que. Indica una relación de al menos 10 veces.
En nuestro caso el DBP será colocado a 3.2m de la fuente. Esta distancia asegura que la condición de campo lejano se cumplirá para ondas sonoras con una frecuencia máxima aproximada no mayor que 5310Hz.
SET DE MEDICIONES.
El set de mediciones está soportado sobre equipos e instrumentos tradicionales controlados por un instrumento virtual que se ejecuta en una computadora y constituye el núcleo de dirección y sincronización de todas las acciones. Veamos a continuación la relación de instrumentos y algunas de sus características:
· Sistema de mesa giratoria Brüel & Kjaer tipo 9640 (ver figura 3). Permite controlar la orientación de DBPs (bocinas, micrófonos e hidrófonos), durante la medición de respuestas direccionales, de la potencia de sonido y de radiación direccional de ruido. Soporta pesos de hasta 100kg, permite rotaciones continuas, relativas y absolutas; y es controlable directamente a través de su controlador, a través del control remoto o desde una PC a través de una interfaz de datos IEEE 488 [5]. Tiene un reducido set de comandos que hace fácil e intuitiva su manipulación.

· Tarjeta de interfaz PCI-GPIB (IEEE 488) tipo WQ 1270 GPIB. Permite enviar comandos desde una PC al controlador de la mesa giratoria a través de un cable de conexión GPIB.
· Tarjeta de adquisición de datos NI USB-6251, tipo mass termination. Es un dispositivo multipropósito que permite la adquisición de señales analógicas. Cuenta con 16 entradas analógicas configurables para lecturas en modo diferencial o referido a tierra. El conversor A/D es común para todas las entradas y su frecuencia de muestreo máxima es de 1.25MS/s con resolución de 16 bits y rango máximo de amplitud de ±10V. Este dispositivo resulta ideal para mediciones de señales de audio.
· Bocina 8Ohm, 5W. En principio, puede ser usada cualquier bocina comercial que permita generar los tonos con las frecuencias deseadas y los niveles de sonoridad y distorsión aceptables.
· Amplificador de potencia de audio, 100W, stereo, Brüel & Kjaer tipo 2716-C. Concebido como un amplificador de potencia de propósito general para analizadores de audio [6].
· Computadora personal donde se ejecuta el instrumento virtual desarrollado sobre el ambiente de desarrollo para aplicaciones de instrumentación, automatización y control LabVIEW 2011 .La corporación National Instruments, recomienda emplear una computadora personal con la siguientes características: Procesador Pentium 4/M o equivalente, RAM 1GB, resolución de pantalla 1024 X 786 pixeles y espacio en disco 3.3GB [7].
· Medidor de presión sonora, Brüel & Kjaer tipo 2238 Mediator. Este instrumento no se emplea en el momento de ejecutar las mediciones, se emplea antes como elemento de calibración para realizar lecturas del nivel de presión sonora en la posición que ocupará el DBP.
· Termómetro: EasyView 20, EXTECH INSTRUMENTS, (hygro-thermometer). Permite monitorear el comportamiento de la temperatura ambiente.
· Cámara semi-anecoica. Permite crear el ambiente con condiciones especiales para la realización de mediciones acústicas [8]. En nuestro caso, condiciones similares a la propagación del sonido en campo libre [3,9].
El sistema incluye además todos los cables de interconexión de los equipos e instrumentos, trípodes y accesorios mecánicos para sujeción.
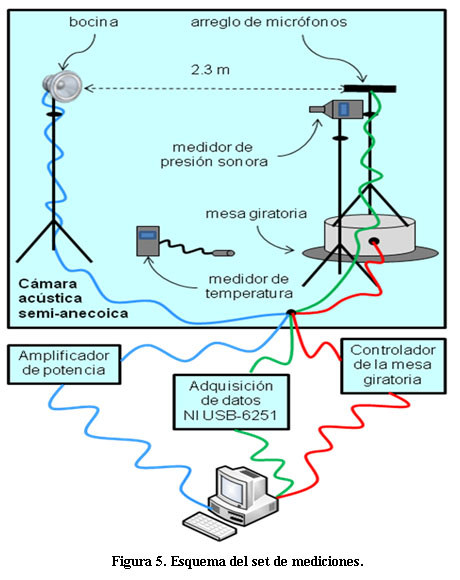
El DBP es colocado, con ayuda de un trípode sobre la mesa giratoria (ver figura 4). Esto permite controlar el ángulo de incidencia del campo de sonido generado por la bocina. Tanto la bocina como el arreglo de micrófonos y la mesa giratoria son colocados en el interior de la cámara semi-anecoica. Los cables de señales y alimentación pasan hacia el exterior de la cámara a través de los accesos pasa-muro especialmente diseñados para preservar el aislamiento acústico de la cámara. La figura 5 muestra un esquema simplificado del set de mediciones.

La computadora personal como núcleo controlador y coordinador realiza las siguientes acciones:
· Genera una señal sinusoidal (tono de frecuencia fija), a través de la salida de línea de la interfaz de sonido. Mantiene la señal activa durante el tiempo necesario para realizar la medición correspondiente a cada posición angular y detiene la generación durante el paso a la siguiente posición angular.
· Configura la tarjeta de adquisición de datos para realizar las mediciones de las señales de salida del arreglo de micrófonos y toma sus lecturas a través de la interfaz de datos USB.
· Envía las ordenes (comandos ASCII), al controlador de la mesa giratoria, a través de la tarjeta de interfaz GPIB, para permitir la rotación de una posición angular a siguiente.
· Procesa, en tiempo real, los datos obtenidos durante la medición y muestra los resultados en la pantalla a través de una interfaz gráfica de usuario amigable. Esto permite que el operador supervise el proceso de medición mientras este trascurre.
· Almacena los resultados de las mediciones para su análisis y publicación posterior.
SECUENCIA DE TRABAJO CON EL SET DE MEDICIONES.
Secuencia de pasos para obtener el patrón de directividad del DBP:
1. Colocar y conectar todos los equipos e instrumentos que conforman el set de mediciones.
2. Energizar todos los equipos e instrumentos y esperar el tiempo reglamentado para su calentamiento antes de realizar cualquier medición (ej. 15 minutos).
3. Ajustar el nivel de la señal generada a través de la interfaz de sonido de la PC y la ganancia del amplificador de potencia. Para esto serán realizadas varias mediciones colocando el DBP orientado con respecto al campo de sonido en la dirección donde se espera obtener las lecturas máximas de potencia. Durante estas mediciones de calibración se observará que los valores de distorsión total de armónicos y relación señal ruido se encuentre dentro del rango de valores permitidos (ej. %THD=3%, SNRe»30dB).
4. Una vez ajustado el nivel de señal del generador se realiza una lectura del nivel de presión sonora. Para ello se retira, momentáneamente, el DBP y en su lugar se coloca el medidor de presión sonora.
5. Colocar nuevamente el DBP sobre la mesa giratoria.
6. Tomar una lectura de la temperatura ambiente.
7. Cerrar la cámara semi-anecoica.
8. Silenciar todas las fuentes de ruido acústico y electromagnético que puedan afectar el resultado de la medición.
9. Detener la ejecución de cualquier programa de aplicación que pueda hacer uso de la interfaz de sonido de la PC durante la medición y cualquier otro programa que pueda interferir la medición (ej. Efectos de sonidos del sistema operativo, programas antivirus, programas de mantenimiento y reparación del sistema operativo, etc.).
10. Ejecutar el instrumento virtual que realizará la medición de forma automática.
La figura 6 muestra el panel frontal del instrumento virtual.

ALGORITMO DEL INSTRUMENTO VIRTUAL.
Una vez comenzada la ejecución del instrumento virtual, el mismo cumple el siguiente algoritmo:
1. Crear la tarea de medición que ejecutará la tarjeta de adquisición de datos y configurar sus parámetros (ej. frecuencia de muestreo: 44100S/s, muestras por canal 10752S, modo: muestreo finito, conexión de los terminales de entrada: diferencial,).
2. Cargar los coeficientes de ponderación de amplitud y fase almacenados en el disco duro de la PC, en forma de fichero de hoja de datos separados por tabulaciones. Los coeficientes describen la respuesta de amplitud y fase vs. frecuencia de filtros que permiten ecualizar las respuestas de los ocho micrófonos del DBP. Esto es necesario debido a las diferencias de sensibilidad (amplitud) y fase intrínsecas a los micrófonos. La forma de obtener estos coeficientes no es abordada en el presenta artículo.
3. Cargar los coeficientes de ponderación de fase para ecualizar las respuestas de fase vs. frecuencia de los ocho canales de adquisición. La tarjeta de adquisición introduce un desfasaje aproximadamente constante entre las muestras de los ocho canales correspondientes a un mismo instante de tiempo. Esto es debido a que cuenta con un único canal de conversión A/D multiplexado entre todos los canales de adquisición.
4. Crear el buffer de muestras que serán generadas a través de la interfaz de sonido (ej: señal sinusoidal de frecuencia 4250Hz, amplitud: 500 mV, frecuencia de muestreo 44100 S/s, cantidad de muestras 44100 S).
5. Iniciar la reproducción del tono de frecuencia fija.
6. Capturar del buffer de muestras correspondiente a cada uno de los ocho micrófonos del DBP.
7. Procesar de los datos adquiridos.
8. Actualizar, en tiempo real, los indicadores de la interfaz gráfica de usuario (diagrama polar, forma de onda de las señales capturadas, espectro de amplitud de las señales capturadas, frecuencia estimada, potencia de la frecuencia estimada, por ciento total de distorsión de armónicos de la frecuencia estimada y relación señal/ruido entre la frecuencia estimada y el ruido total).
9. Enviar comando (en formato ASCII) a la mesa giratoria para ejecutar una rotación hacia la próxima posición angular (ej. turn_rel+1).
10. Ejecutar demora de tiempo para permitir la rotación de la mesa giratoria (ej. 1.5 segundos).
11. Retornar al punto 4 para ejecutar las mediciones correspondientes a la próxima posición angular. El lazo entre los puntos 4 y 10 se repite hasta tomar todas las mediciones correspondientes a una rotación completa de 360°. Al terminar la rotación se pasa al último punto del algoritmo.
12. Salvar en el disco duro los resultados finales del procesamiento de los datos (ej. Valores numéricos vs. Posición angular en forma de fichero de hoja de datos delimitados por tabulaciones, imagen del patrón de directividad obtenido en formato de fichero de imagen .png, .bmp o .jpg).
El algoritmo de ejecución del instrumento virtual completa una rotación de 360° en un tiempo no menor de 12 minutos.
ALGORITMO DE PROCESAMIENTO DE SEÑALES.
Para identificar los datos correspondientes a cada una de las ocho señales del arreglo de micrófonos usaremos el subíndice i (0 ³ i ³ 7). Las secuencias de datos adquiridos correspondientes a cada canal serán denominadas como s(n)i donde n es el índice de tiempo discreto. Cada secuencia tendrá una longitud de 10752 muestras, lo cual, permite aplicar el algoritmo de procesamiento de señales un total de 20 veces sobre paquetes de 1024 muestras con solapamiento de 50%.
Cada paquete de 1024 muestras será sometido al siguiente algoritmo:
1. Aplicar una ventana de Hanning a la secuencia de datos s(n)i obteniéndose la secuencia s´(n)i.
2. Calcular la transformada rápida de Fourier (FFT, N=1024), de la secuencia de entrada s´(n)i, obteniendo la secuencia de salida S(f)i.
3. Tomar solo la primera mitad (N=512), de los valores calculados a través de la FFT obteniéndose la secuencia de salida S´(f)i.
4. Aplicar los coeficientes de ponderación de amplitud y fase correspondientes a cada canal H(f)i. Esto se realiza a través de la multiplicación S´(f)i x H(f)i, obteniéndose la secuencia de salida Y(f)i.
5. Sumar las ocho secuencias Y(f)i obteniendo la secuencia de salida Y´(f)i.
Una vez promediadas las 20 secuencias de salida Y´(f)i se procede a estimar la componente de frecuencia de máxima amplitud en un rango o entorno de frecuencias esperado. Esta componente debe coincidir con la frecuencia del tono generado a través de la tarjeta de sonido.
Por último, al comprobar la coincidencia de frecuencias, son estimados todos los parámetros necesarios para actualizar los indicadores de la interfaz gráfica de usuario.
RESULTADOS.
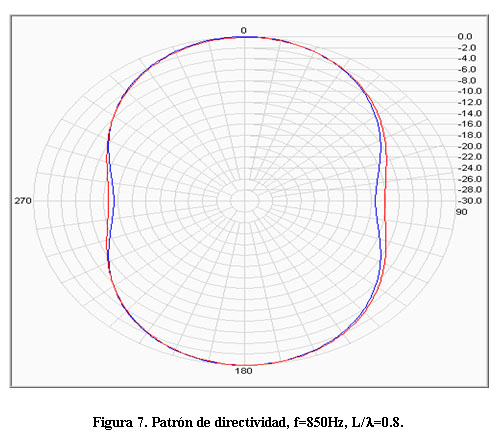
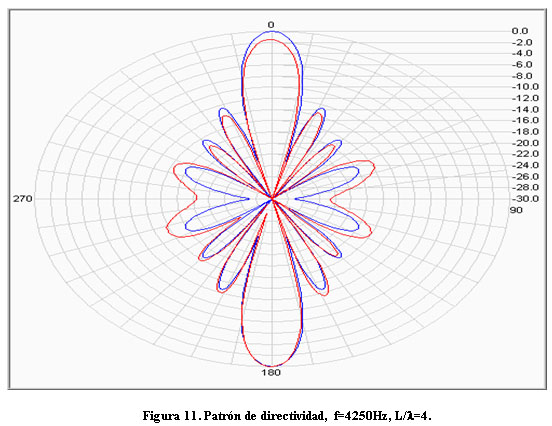
En las figuras 7, 8, 9, 10 y 11 se pueden apreciar los patrones de directividad horizontal normalizados obtenidos para las frecuencias: 850Hz, 1700Hz, 2550Hz, 3400Hz y 4250Hz.
En color rojo aparecen los patrones correspondientes al resultado de las mediciones, y en color azul los patrones de los valores ideales estimados considerando que: el DBP se encuentra en el campo lejano de la fuente, que la velocidad de propagación es de 340m/s y que los elementos del DBP son idénticos y tienen una respuesta omnidireccional. Los valores representados se corresponden con la potencia estimada para cada frecuencia y posición angular expresados en decibeles [4,10].


Para valorar la similitud de los resultados obtenidos con los resultados ideales se calculó el valor de error medio cuadrático entre los valores de ambas curvas para cada caso. La tabla 1 muestra los valores obtenidos.

Los registros de la temperatura ambiente indican que la temperatura promedio real fue de 31.5°C durante todo el proceso de medición.
De forma general, los patrones obtenidos coinciden en cuanto a la posición del lóbulo principal, el ancho del lóbulo principal y la cantidad y posición de los lóbulos laterales con los resultados esperados, lo cual, es sumamente alentador. Pero es posible apreciar diferencias.
Entre los elementos de mayor peso considerados como causa de estas diferencias se encuentra el efecto de posibles errores en los coeficientes de ponderación de amplitud empleados para ecualizar la respuesta de los elementos del arreglo.
La figura 12 muestra los patrones de directividad obtenidos, mediante un programa de simulación creado, para una frecuencia de 2450Hz. El patrón en rojo fue obtenido introduciendo errores aleatorios de hasta un 20% en los coeficientes de ponderación de amplitud de los elementos del arreglo. El patrón en azul se corresponde con la respuesta ideal, o sea, todos los elementos del arreglo idénticos.
Los efectos de la diferencia entre la temperatura ambiente asumida para obtener los patrones ideales y la temperatura real a la cual fueron realizadas las mediciones fueron igualmente analizados. El análisis permitió concluir que, aunque una variación de 17°C introduce cambios en la forma del patrón, estos no son significativos en comparación con los cambios producidos por los coeficientes de ecualización de las respuestas de amplitud de los elementos del arreglo.
La figura 13 muestra los patrones de directividad horizontal normalizados (q=90°, 0°<f<90°) obtenidos, mediante el programa de simulación, para los casos de temperaturas ambientes de 14.5°C y 31.5°C

La simulación y medición de los errores de fase entre los elementos del arreglo no son abordados en este trabajo, serán objeto de estudio para futuros trabajos
CONCLUSIONES Y TRABAJOS FUTUROS.
Como conclusiones es posible decir que:
· Fue obtenido un set de mediciones que permite medir el patrón de directividad de un arreglo de micrófonos con resolución de 1º de forma automática y en un tiempo no menor de 12 minutos.
· El set propuesto está definido por software en un alto por ciento, lo cual le confiere flexibilidad en cuanto a las posibilidades de configuración de la medición, procesamiento de los datos y almacenamiento y representación de los resultados.
· Fue posible obtener resultados de gran calidad que concuerdan en gran medida con los resultados teóricos esperados.
Desde el punto de vista económico esta alternativa resulta atractiva ya que tanto la tarjeta de adquisición de datos como la computadora empleadas pueden ser reutilizadas en otras tareas de medición. En particular la tarjeta de adquisición de datos y el amplificador pueden ser reemplazados por otro modelo de las mismas firmas, u otras firmas, más baratos y con iguales prestaciones.
Como trabajo futuro que de continuidad a esta investigación se proponen los siguientes aspectos.
· Desarrollar un método práctico para la calibración y ecualización de los elementos del arreglo.
· Dotar al instrumento virtual con más herramientas de configuración de la medición, presentación de los resultados y almacenamiento de los resultados. Por ejemplo, incorporar un control en la interfaz gráfica de usuario que permita seleccionar la resolución angular del patrón a obtener, ampliar las posibilidades en cuanto a los formatos en que son salvados los datos y añadir la opción de confección e impresión automática de los reportes de medición.
· Añadir la posibilidad de que el operador pueda observar en un mismo diagrama polar los resultados que van siendo obtenidos en tiempo real de conjunto con los resultados esperados u otros resultados de mediciones previamente realizadas.
· Optimizar el grado de sincronización entre las tareas del algoritmo de medición, el tiempo de duración de estas y la cantidad de muestras adquiridas por posición angular. Esto permitirá reducir el tiempo total invertido actualmente en una medición.
REFERENCIAS.
1. McCowan, Iain: «Microphone Arrays: A Tutorial», April 2001.
2. Benesty, Jacob. Chen, Jingdong, Huang, Yiteng: «Microphone Array Signal Processing (Springer Topics in Signal Processing)».Springer, 2008.
3. Brüel & Kjaer: «Measuring Sound», revision september 1984.
4. Herbordt, Wolfgang: «Sound Capture for Human/Machine Interfaces, Practical aspects on microphone array signal processing», Springer, 2005.
5. Brüel & Kjaer: «PRODUCT DATA, Turntable System - Type 9640», BP 1617-13 05/11.
6. Brüel & Kjaer: «PRODUCT DATA, Audio Power Amplifier 100W Stereo - Type 2716-C», BP 1923-12 2007-02.
7. National Instruments Corporation: «LabVIEWTM Release Notes, LabVIEW 2011 Instalation Guide», 371778G-01, Jun11.
8. National Instruments Corporation: «Acoustics Test Chambers and Environments», 2009
9. Alton Everest, F.: «Master Handbook of Acoustics», McGraw-Hill, 2001.
10. National Instruments Corporation: «The Fundamentals of FFT-Based Signal Analysis and Measurement», Application Note 041, july 2000.
11. Rajeev Bansal: «The Far-Field: How Far is Far Enough», Design Ideas. Applied Microwave & Wireless. amw@amwireless.com
Recibido: Abril 2013
Aprobado: Mayo 2013


{kind=link}
{kind=link}
{kind=link}
{kind=link}