










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería Electrónica, Automática y Comunicaciones
versión On-line ISSN 1815-5928
EAC vol.35 no.2 La Habana Mayo.-ago. 2014
ARTICULO ORIGINAL
Uso de señales aleatorias como parte de una metodología para la calibración de sismómetros y acelerómetros
Using random signals as part of a methodology for calibrating seismometers and accelerometers
Ing. Eduardo Rafael Diez Zaldívar
Centro Nacional de Investigaciones Sismológicas (CENAIS),Santiago de Cuba, Cuba. E-mail: diez@cenais.cu
RESUMEN
Este trabajo propone el uso de señales aleatorias de ruido para la determinación de la respuesta en frecuencia de los sensores sísmicos (sismómetros y acelerómetros), como parte de un dispositivo para realizar la calibración de este tipo de dispositivos, que constituyen el elemento fundamental de los canales de medición sismométricos. Se presenta la fundamentación matemática del método, partiendo de considerar estos sensores como sistemas lineales invariantes en el tiempo (LTI) excitados por señales estocásticas y el cálculo de las respuestas correspondientes partiendo del tratamiento de estas señales en función de las densidades espectrales de potencia y la relación de estas funciones con la respuesta a frecuencia de estos sistemas.
Se muestran las relaciones principales salida-entrada y las ecuaciones que definen la respuesta de estos sistemas y finalmente se grafica, a modo de ejemplo, la calibración de un sensor de banda ultra-larga de uso extensivo en las redes sísmicas a nivel nacional e internacional.
Palabras Claves: calibración, respuesta a frecuencia, mesa de calibración, señales de ruido, sismómetros.
ABSTRACT
This paper proposes the use of random noise signals for the determination of the seismometers and accelerometers frequency response, as part of a device for device calibration which are the fundamental part of seismometricchannel. The theory of the method is presented including mathematical relationship, considering these sensors as linear time invariant system (LTI) excited by stochastic signals and calculating the frequency response using these signals as a function of the Power Spectral Densities (PSD).
Also, the main relationships and input - output equations defining the frequency response of these systems are shown and finally presented, for example, the calibration of very broad band sensor which is use extensive in seismic networks at national and international level.
Keyword: calibration, frequency response, shake table, stochastic signals, seismometers.
INTRODUCCION
Los terremotos constituyen uno de los fenómenos naturales de más amplio efecto sobre la vida social y la infraestructura económica de los países en el mundo. Unidos a ciclones, tsunamis, lluvias torrenciales, epidemias y otros fenómenos naturales pueden desacelerar, detener e incluso revertir el desarrollo de uno o varios países, incidiendo fundamentalmente en los de más bajo nivel económico lo cual agrava la ya deplorable situación en que muchos de estos se encuentran.
Estos fenómenos, a lo largo de la historia, también han cobrado la vida de millones de personas en todas las zonas potencialmente activas de la Tierra.Entre otros fenómenos, los deslizamientos de tierra y de lodo desencadenados por los terremotos han sido los causantes de la mayoría de las muertes y lesiones serias en varios terremotos recientes, incluyendo los de Tayikistán (1989), Filipinas (1990) y Colombia (1994), además de China (1920) y Perú (1970), enterrando casas y poblados enteros bajo tierra y lodo. Además, los Tsunamis pueden causar destrozos en las líneas costeras y alrededores de bahías y puertos incluyendo a la población que reside en estas zonas. Este fenómeno ha sido el responsable de la mayoría de las muertes y lesiones serias en Nicaragua (1992), Japón (1993) e Indonesia (1992 y 1994).
El interés del hombre por tratar de entender este fenómeno y realizar el registro de las ondas sísmicas se remonta a la antigua China en el siglo II. Zhang Heng en el año 132 d.Cinventó el primer instrumento mecánico para indicar la dirección de llegada de las ondas provenientes del terremoto según [1] y [2], seguido de instrumentos primitivos entre los cuales resalta el sistema propuesto por el abate De Hautefeuille y descrito en [3].
Los primeros sismógrafos verdaderos, que introducen además el acotamiento en tiempo de la señal registrada, aparecen descritos en [4] y [5]. Sucesivas mejoras tecnológicas han sido realizadas desde entonces, entre las cuales destacan los estudios de Omori [6] y Wiechert [7] que promovieron la construcción de sensores horizontales de largo período. Los desarrollos propuestos por Galitzin [8] y Wenner [9] con la introducción de los transductores electromagnéticos que, unidos a los galvanómetros de espejo, permitieron la grabación de las señales en papel fotográfico con amplificaciones del orden de 1000 para períodos de 12 segundos, resultan otra etapa destacada en este sentido.
Finalmente, el descubrimiento del principio «force-feedback balance» [10], permitió el diseño de sismómetros compactos de amplio rango dinámico y especial sensibilidad, entre los cuales destaca el STS-1 [11] y [12].
A pesar de los diversos cambios tecnológicos y no obstantelos desarrollos de nuevos materiales para la construcción de los sensores sísmicos, han sido los sismómetros y acelerómetros, el eslabón fundamental en la concepción de los canales sismométricos. Como en toda medición de variables físicas resulta necesario conocer, con exactitud, la influencia que pueda ejercer el sensor sobre la señal que recibe, de modo que pueda reconstruirse de manera fiel, a partir del registro, la onda sísmica original y obtener valores confiables, en términos de amplitud y frecuencia, para el posterior cálculo de los parámetros dinámicos y cinemáticos de los terremotos así como la aplicación de los métodos indirectos de estudio del interior de la Tierra.
Se define entonces la esencia de la calibración, desde el punto de vista de la instrumentación sismológica, como el cálculo de la función de transferencia de los instrumentos usados para el registro del movimiento del terreno estableciendo la relación entre la señal de entrada (el movimiento del terreno) y la de la salida del sismómetro (usualmente una señal eléctrica contentiva de la información sensada).
En este sentido, se han definido varios métodosde calibración, analíticos y empíricos.Losprimeros enfocan el cálculo de la función de transferencia a partir del modelo matemático que caracteriza el comportamiento de un sistema pendular del tipo masa resorte, y los segundos excitan al sensor con diversos estímulos, además de realizar mediciones directas sobre este, que permiten obtener el valor de sus elementos electro-mecánicos y en función de ello, calculansu respuesta en frecuencia.
Estos métodos poseen limitaciones y no permiten el cálculo de la respuesta en frecuencia real de estos tipos de sensores, teniendo en cuenta sus características físicas y mecánicas así como las variaciones en los valores de los componentes electrónicos que contiene en su interior, producidos por el tiempo y su exposición a agentes físico-químicos condicionados por las condiciones medio ambientalesen que funcionan, [13]. Además, el desarrollo de sensores en la actualidad, con rango dinámico expandido y uso extensivo de la electrónica conexay que por sus características constructivas constituyen unidades selladas,no permite que puedan ser usados los métodos que impliquen medición de elementos estructurales del sismómetro de forma directa y condiciona la necesidad de la implementación de metodologías que consideren al sensor como unsistema entrada-salida con determinada respuesta de frecuencia ante un estímulo sin enfatizar en su estructura interna.
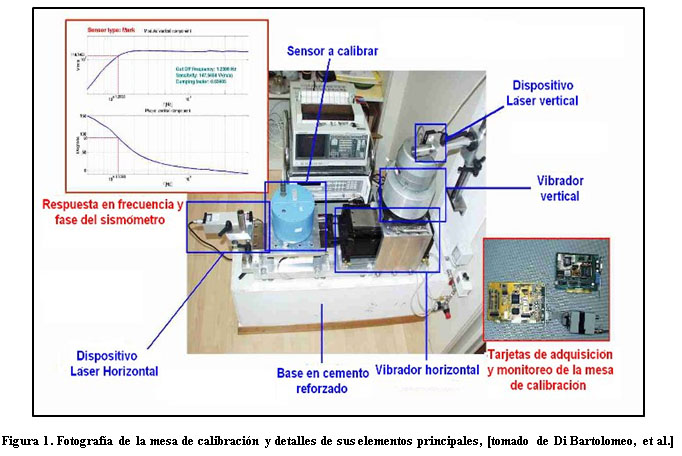
El trabajo que se presenta es el fruto de una colaboración entre el «Centro di RicercheSismologiche» (CRS) que operala red sísmica del norte de Italia y el Centro Nacional de Investigaciones Sismológicas de Cuba, institución rectora de las investigaciones sismológicas en el país. Se ha trabajado sobre un esquema de calibración diferente, usando una mesa de calibración construida bajo el principio de desplazamiento sobre colchón de aire, la inyección de señales aleatorias de ruido blanco, el manejo de todo el sistema mediante algoritmos de computación y la elaboración de los datos mediante programas informáticos. El diagrama en bloques principal se muestra en la Figura 1. El presente artículo corresponde al fundamento teórico-matemático del cálculo de la función de transferencia de los sensores sísmicos considerando estos como sistemas lineales invariantes en el tiempo y mediante el uso de señales estocásticas de ruido y se enmarca dentro de los límites teóricos, la información detallada sobre la mesa de calibración, diseño de las interfaces electro-mecánicas y los programas de cálculo escritos para la determinación de las características de los sensores sísmicos pueden ser encontradas en [14], [15], [16], [17] y [18]. Este esquema de mesa de calibración permite una caracterización dinámica del sistema por cuanto se realiza la simulación del movimiento del terreno que es la forma más eficiente de excitar este tipo de sensores y, además, el uso de señales de ruido pretende y logra la determinación de la respuesta instrumental en todo el rango de frecuencia de interés para la sismología.
MATERIALES Y MÉTODOS
El fundamento matemático del uso de señales aleatorias de ruido para la calibración de los sensores sísmicos parte de dos postulados fundamentales: el primero de ellos es considerar que los sismómetros y acelerómetros tienen propiedades que hacen que su comportamiento sea propio de un sistema lineal invariante en el tiempo (LTI). En segundo lugar, la señal que excita al sensor es una señal estocástica en el dominio del tiempo determinada con exactitud a través del uso de sensores láser de posición.La señal de salida del sensor es, también, una señal de carácter aleatorio que contiene implícita la respuesta en frecuencia que deseamos determinar. De acuerdo a la Figura 2, se trata entonces de determinar una relación entre dos señales estocásticas siendo posible analizar estos tipos de señales através de relaciones matemáticas que permiten hallar sus transformadas y, por consiguiente, su análisis en el dominio de frecuencia.
Para identificar un proceso estocástico completo se necesitaría saber la función de distribución de probabilidades en todo instante,condicionada a los tiempos anteriores y posteriores. Esto, en la práctica, es imposible de obtener por tanto el análisis se reduce a determinar las propiedades estadísticas en instantes de tiempo dados. La mayoría de las propiedades de estos tipos de señales puede resumirse, en el dominio del tiempo, en términos de medias como el valor esperado, la auto-correlación o la auto-covarianza.
Para señales estocásticas ESA la función de auto-correlación se determina mediante las relaciones: (ecuaciones 1 y 2)
Para el caso de dos señales estocásticas ![]() y
y ![]() ,con funciones de auto-correlación
,con funciones de auto-correlación ![]() y
y ![]() , respectivamente, las funciones de correlación cruzada vienen dadas por: (ecuaciones 3 y 4)
, respectivamente, las funciones de correlación cruzada vienen dadas por: (ecuaciones 3 y 4)
Por otro lado, un sistema se considera lineal invariante en el tiempo (LTI) si cumple con los siguientes estimados:
- Linealidad.
- Invarianza en el tiempo.
El hecho de que un sistema sea LTI, hace más manejable su análisis puesto que es posible descomponer a una señal arbitraria en componentes más simples, hallar las respuestas del sistema a cada una de ellas, y luego, por el principio de superposición, sumar dichas respuestas para obtener la respuesta total a la entrada arbitraria.
Para determinar la respuesta de estos sistemas a señales aleatorias es suficiente convolucionar la entrada con la respuesta alimpulso del sistema.
La integral de Convolución para un sistema LTI queda de la forma: (ecuación 5 )
La respuesta al impulso ![]() se describe por su transformada de Fourier de la forma: (ecuación 6)
se describe por su transformada de Fourier de la forma: (ecuación 6)

donde H(f) es la función de transferencia del sistema si se cumple (ecuación 7)
Entonces, de acuerdo a las propiedades de la transformada de Fourier aplicadas a un sistema LTI, se obtiene: (ecuaciones 8 y 9 )

Sin embargo, estamos en presencia de señales estocásticas representadas en el dominio del tiempo que afectan un sistema Lineal Invariante en el tiempo (LTI) y queremos determinar la respuesta en frecuencia del sistema, por lo que es evidente la necesidad de aplicar transformaciones de Fourier.
La caracterización de estas señales en el dominio de la frecuencia (respuesta en frecuencia del sistema mediante el cociente entre las señales de entrada y salida del sistema LTI), no es posible efectuarlas directamente a través de la transformada de Fourier de ambas señales por cuanto se trata de magnitudes casuales de las cuales muchas no tienen representación como transformada.
Sin embargo, para procesos aleatorios ergódicos y estacionarios en sentido amplio (ESA) existe una relación espectral temporal de acuerdo al teorema de Wiener- Kinchine que establece que la Densidad Espectral de Potencia (PSD) y el promedio temporal de la función de auto-correlación son pares transformados de Fourier definidos como: (ecuaciones 10 y 11 )

De tal forma es posible realizar el paso del dominio del tiempo al análisis de la señal en el dominio de la frecuencia para señales aleatorias continuas. La PSD es la transformada de Fourier de la función de auto-correlación y, como ésta es una transformación matemática unívoca, se demuestra que la función de auto-correlación y la PSD contienen básicamente la misma información acerca de la señal y, por tanto, los análisis que se derivan de ella son válidos a los efectos de la determinación de la función de transferencia por cuanto ![]() representa el comportamiento de la señal estocástica en el dominio del tiempo y de manera similar
representa el comportamiento de la señal estocástica en el dominio del tiempo y de manera similar ![]() en el dominio de la frecuencia.
en el dominio de la frecuencia.
Entonces se define que, (ecuación 12)
La conclusión más importante es que el módulo al cuadrado de la función de transferencia del sistema LTI es igual al cociente entre las densidades espectrales de potencia de la salida ![]() entre la entrada
entre la entrada ![]() . (ecuación 13)
. (ecuación 13)
Como sucede en el dominio del tiempo, es difícil caracterizar la señal de salida ![]() aun conociendo la distribución de la señal de entrada. Lo mismo sucede con la densidad espectral de potencia
aun conociendo la distribución de la señal de entrada. Lo mismo sucede con la densidad espectral de potencia ![]() , por lo tanto definimos las densidades espectrales de potencia cruzadas como: (ecuaciones 14 y 15 )
, por lo tanto definimos las densidades espectrales de potencia cruzadas como: (ecuaciones 14 y 15 )

De acuerdo a Wiener-Kinchine, las correlaciones cruzadas respectivamente pueden ser halladas usando la transformada inversa de Fourier de la forma: (ecuaciones 16 y 17 )

De tal forma, las densidades espectrales entrada-salida y salida-entrada de una señal estocástica ![]() que resultan ser la salida de un sistema LTI (el sensor sometido a calibración) excitado por otra señal estocástica
que resultan ser la salida de un sistema LTI (el sensor sometido a calibración) excitado por otra señal estocástica ![]() , pueden ser determinadas de acuerdo a: (ecuaciones 18 y 19 )
, pueden ser determinadas de acuerdo a: (ecuaciones 18 y 19 )

La ecuación (19) puede ser re-escrita como:(ecuación 20 )

De tal forma queda definida la fórmula para la determinación de la respuesta en frecuencia de los sensores sometidos a calibración mediante el método propuesto.
De forma práctica, existen varios métodos, dentro de la biblioteca de funciones de MATLAB para procesamiento de señales, para la determinar las densidades espectrales de potencia, entre ellos:
- Métodos no-paramétricos.
- Métodos paramétricos.
- Métodos sub-espaciales.
En este caso se usaron específicamente los métodos no-paramétricos, que se definen porque la estimación de la Densidad Espectral de Potencia (PSD) es realizada a partir de la señal propiamente. El más común de estos métodos es el cálculo del periodograma y una de sus variantes a través de la implementación de la aproximación de Welch.
A través de la biblioteca de funciones de tratamiento de señales de MATLAB, se decidió usar específicamente la función «TFEestimate» que es una variante de cálculo que usa el método de periodograma promedio modificado del Welch's. Los vectores son segmentados en 8 secciones de igual longitud con 50% de solapamiento entre estas. Cada segmento está enmarcado en una ventana de Hamming con igual longitud que la del segmento. La densidad espectral de potencia es estimada en unidades de potencia/radianes.
Ambos vectores deben tener la misma longitud. La función de transferencia es modelada a través de un sistema Lineal Invariante en el Tiempo (LTI) y corresponde al cociente cruzado entre las densidades espectrales de potencia ![]() de X y
de X y ![]() de Y, de la forma, (ecuación 21 )
de Y, de la forma, (ecuación 21 )

donde: ecuaciones 22, 23 y 24

Una serie de parámetros pueden ser modificados para ajustar el cálculo de la función de transferencia entre estos, nfft (frecuencias para las cuales es estimada la densidad espectral de potencia, fs (frecuencia de muestreo), y «noverlap» (número de muestras que se sobreponen en cada ventana seleccionada para el cálculo). Los detalles de este método pueden ser encontrados en [19], [20] y [21].
RESULTADOS Y DISCUSIÓN
La forma principal de validación de este método consistió en realizar la calibración de los principales tipos de sensores sísmicos usados en la actualidad, específicamente de los siguientes sismómetros y acelerómetros:
- Sismómetro de corto período SM-3.
- Sismómetro de corto período UP-251.
- Mark-50 en sus tres componentes individuales. Sismómetro de corto período para el registro de eventos sísmicos locales.
- Mark-L4, sismómetro pasivo de corto período y sensibilidad media usado para mediciones de sismicidad local.
- Lennartz 3D-1s, sismómetro tri-axial de corto período, sismómetro tri-axial de corto período,
- Lennartz 3D-5s, sismómetro tri-axial de período intermedio (5 segundos).
- Guralp CMG-3T, sismómetro de 120 segundos de período equivalente.
- Guralp CMG-40, sensor de período largo hasta 30 segundos.
- Sismómetro Willmore de período corto.
- NanometricsTrillium 120s, sismómetro de banda ultra-larga hasta 120 segundos.
- Streckeisen STS-2 (sismómetro de 120 segundos).
- Kinemetricsepisensor, acelerógrafo tri-axial para el registro de terremotos fuertes.
- Acelerómetro MEMS, acelerómetro basado en dispositivos nanométricos.
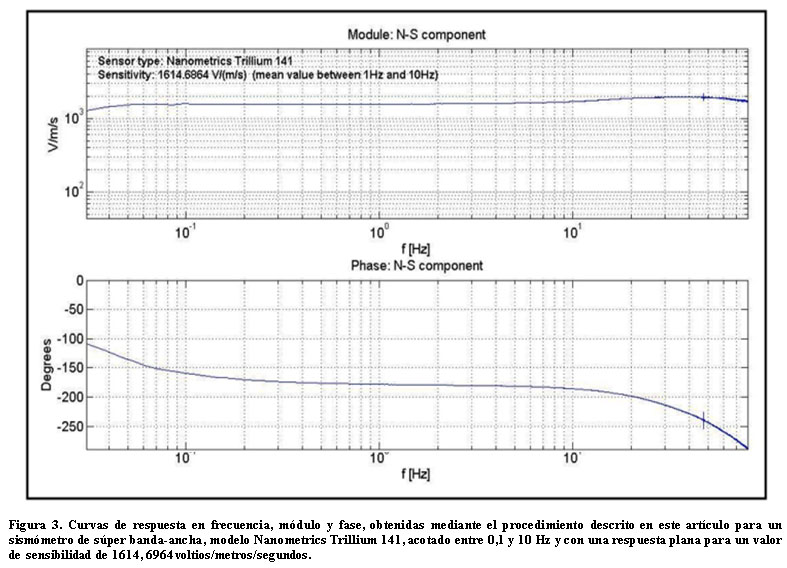
Volviendo al esquema de la Figura 2, en la Figura 3 se observan las curvas de respuesta en frecuencia y fase de un sismómetro NanometricsTrillium 120s para la componente horizontal Norte/Sur. Se evidencia la linealidad de la curva del módulo en la banda de interés donde aparecen la mayoría de las señales sísmicas, desde120 segundos (0,00833 Hz) hasta 10 Hz.
El gráfico ha sido ajustado a los valores siguientes
- Frecuencia: desde 0,1 hasta 50 Hz (eje horizontal en escala logarítmica).
- Valores de módulo: desde 1 V/m/s hasta 1000 V/m/s, eje vertical en escala logarítmica.
- Fase: desde -270 hasta 180 grados (eje vertical lineal).
A diferencia de métodos usados anteriormente, donde la respuesta se obtiene mediante la unión de varios puntos a frecuencias predeterminadas generando los consecuentes errores entre los valores de frecuencia, este método caracteriza la función de transferencia de estos tipos de sensores de forma continua, con pasos de frecuencia de 0.001 Hz aumentando la precisión de la determinación de la respuesta instrumental e incidiendo en la mejora de la calidad del dato sísmico resultante del análisis de los terremotos.
En todos los casos, los resultados obtenidos son equivalentes a los valores de módulo y fase originales definidos por el fabricante durante la manufactura de este sismómetro, pero teniendo en cuenta las variaciones impuestas por el proceso de envejecimiento de las partes de estos sensores y la alteración de las tolerancias de los componentes electrónicos constitutivos de los circuitos de realimentación empleados en este caso.
El método genera las curvas de ajuste instrumental de una forma compatible con los programas de cómputo que se usan para el análisis de las señales sísmicas y de manera estándar a fin de potenciar el intercambio científico y de datos con redes regionales de similar propósito.
CONCLUSIONES
Se demostró matemáticamente que es posible el uso de señales aleatorias de ruido blanco para la determinación de la respuesta en frecuencia de los sensores sísmicos a través de algoritmos matemáticos, considerando a estos como sistemas lineales invariantes en el tiempo. Además, las curvas de respuesta en frecuencia (magnitud y fase) obtenidas mediante la metodología propuesta, logran un aumento en la precisión de los resultados en los programas de análisis de datos sísmicos y de determinación de parámetros energético-temporales de los eventos sísmicos.El método es extensible a los sensores sísmicos en todo el ancho de banda de frecuencia de las señales sísmicas y para todo el rango dinámico de esta, garantizando los límites de tolerancia aceptados internacionalmente para la calibración de sismómetros y acelerómetros.
Estos resultados han sido aplicados a partir de año 2006 por el autor en la calibración de los sismómetros y acelerómetros correspondientes a la red sísmica del norte de Italia perteneciente al IstitutoNazionale de Oceanografia e di GeofisicaSperimentale (OGS), a los sensores de 5 segundos correspondientes al «IstitutoNazionale di Geofisica e Vulcanologia INGV» y a los sensores usados en la red sísmica cubana.
REFERENCIAS
1. MILNE, D. «Report of a committee appointed at the Glasgov meeting for obtaining instruments and registers to record shocks of earthquakes in Scotland and Ireland», Rep. Br. Ass. Advmt.Sci. 46-49, 1842.
2. NEEDHAM, J. «Science and Civilization in China», 3, Cambridge, 624-635, 1959.
3. FAVARO, A. «Contribuzioniallastoriadellamicrosismologia», AttiIst. venetoSci., ser 6, 2, 91-103, 1884.
4. GRAY, T. «On instruments for measuring and recording earthquake-motions», Phil. Mag. ser. 5, 12, 199-212, 1881.
5. EWING, J.A. «A new form of pendulum seismograph», Trans. Seism. Soc. Japan 1, 38-43, 1880.
6. OMORI, F. «Horizontal pendulums for the mechanical registration of seismic and other earth movements», J. College of Science, Imperial University of Tokyo 11, 121-145, 1899.
7. WIECHERT, E. «Theorie der automatischenSeismographen», Abh. K. Bes. Wiss.GöttingenKlasse , 1-128, 1903.
8. GALITZIN, B. «Zurmethodik der seismometrischenbeobachtungen», Isv. postoyann. tsent. seism. komm. 1, pt. 3, 1-112, 1904.
9. WENNER,F. «A new seismometer equipped for electromagnetic damping and electromagnetic and optical magnification», Bureau of Standard, Journal of Research, Vol.2, Mayo 1929.
10. WIELANDT, E. «EinastasiertesVertikalpendelmittragenderBlattfeder», J. Geophys., 41(5), 545 547, 1975.
11. WIELANDT, EySTRECKEISEN, G. «The Leaf-Spring Seismometer: Design and Perfomance». B.S.S.A, Vol. 72, Nro.6, pp-2349-2367, 1982.
12. WIELANDT, E. y STEIMJ, M. «A digital very-broad-band seismograph». AnnalesGeophysicae, 4, B, 3, pp 227-232, 1986.
13. BEAUDUIN, R., LOGNONNE, P., MONTAGNER, J.P, CACHO, S., KARCZEWSKI, J.F. y MORAND, M. «The effects of the atmospheric pressure changes on seismic signals», Bull. Seism. Soc. Am., Volumen 86, Nro.6, pp 1760-1769, 1996.
14. Di BARTOLOMEO, P., PONTON, F., URBAN, C. y ZULIANI, D. Relazionetecnica relativa al metododiretto di calibrazione di sensorisismometrici tramite tavola vibrante, Rel. OGS-11/2005/CRS-3.
15. DIEZ, E. «Validación del algoritmo TFE usado para la determinación de la respuesta en frecuencia de sensores sísmicos, límite de confiabilidad», Revista Ciencias de la Tierra y el Espacio, Volumen 14, Número 1, ISSN 1729-3790, 2013.
16. DIEZ, E., ZULIANI, D. y PONTON, F. «Cálculo de la respuesta en frecuencia para sensores sísmicos inerciales mediante el script VIBROCALC». II Convención Internacional de la Ingeniería en Cuba y VI Conferencia de Ingeniería mecánica, eléctrica e industrial, Editorial Obras, ISBN 978-959-247-077-4, 2010.
17. DIEZ, E., ZULIANI, D. y PONTON, F. «Mejoramiento de la calidad del registro sísmico mediante el cambio de la metodología de calibración de los sensores, caso de estudio sismómetro SM-3», Revista Ciencias de la Tierra y el Espacio, Volumen 13, Número 1, pp 5-13, ISSN 1729-3790, 2012.
18. DIEZ, E., ZULIANI, D. y PONTON, F. «Cuban seismic network short period seismometer calibration», Abdus Salam Internacional Centre for Theoretical Physics (ICTP), Internal report, IC/IR/2006/006, 2006.
19. ZULIANI, D., DIEZ, E y PONTON, F.»Vibrocalc, seismometerfrequency response elaboration software». Revista Ciencias de la Tierra y el Espacio. Volumen 13, Número 1, pp 15-23, ISSN 1729-3790, 2012.
20. WELCH, P.D., «The Use of Fast Fourier Transform for the Estimation of Power Spectra: A Method Based on Time Averaging over Short, Modified Periodograms,» IEEE Trans. Audio Electroacoustics, Vol. AU-15 June 1967, pp.70-73.
21. HAYES, M. «Statistical Digital Signal Processing and Modeling», John Wiley & Sons, 1996.
22. STOICA, P. yMOSES, R.L. «Introduction to Spectral Analysis», Prentice-Hall, Englewood Cliffs, NJ, 1997, pp. 52-54.
Recibido: Abril 2014
Aprobado: Mayo 2014

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}