










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería Electrónica, Automática y Comunicaciones
versión On-line ISSN 1815-5928
EAC vol.36 no.3 La Habana sep.-dic. 2015
ARTÍCULO ORIGINAL
Algoritmos de rendezvous para redes Radio Cognitivas
Rendezvous algorithms for cognitive radio networks
MSc. Erik Ortiz Guerra, Dr. C. Vitalio Alfonso Reguera.
Departamento de Electrónica y Telecomunicaciones de la Universidad Central «Marta Abreu» de Las Villas, Villa Clara, Cuba
RESUMEN
La radio cognitiva constituye un paradigma prometedor para enfrentar la escasez de espectro radio eléctrico así como para realizar un uso eficiente del mismo. El proceso de rendezovus permite que dos usuarios de la red cognitiva coincidan en un mismo canal y establezcan un enlace de comunicación. Este trabajo se centra en el estudio y comparación de diferentes algoritmos de rendezvous propuestos en la literatura. Son presentados los principales retos del rendezvuos en el contexto de las redes radio cognitivas así como las principales métricas empleadas para su evaluación. Mediante simulación se evalúa el desempeño de un grupo de algoritmos de rendezvous en escenarios prácticos y los resultados obtenidos son contrastados con los resultados teóricos proporcionados por los autores. Los resultados de las simulaciones evidencian que para gran parte de los algoritmos de rendezvous propuestos en la literatura los resultados teóricos brindados por sus autores están distantes de los resultados reales alcanzados por los algoritmos. Adicionalmente, en escenarios simétricos el algoritmo EJS obtiene los mejores resultados tanto en términos de ETTR como de MTTR, mientras que en escenarios asimétricos los algoritmos FRCH y SSB superan al resto de las estrategias de rendezvous.
Palabras claves: Redes radio cognitivas, rendezvous ciego, algoritmos de redezvous.
ABSTRACT
Cognitive radio is a promising paradigm to address the scarcity of radio spectrum as well as for efficient usage. The rendezovus process allows two cognitive users to meet on the same channel and establish a communication link. This work focuses on the study and comparison of different rendezvous algorithms proposed in the literature. We present the major rendezvuos challenges in the context of cognitive networks as well as the main metrics used for evaluation. Through simulation, we evaluate the performance of a group of rendezvous algorithms in practical scenarios and the results are contrasted with the theoretical results given by the authors. The simulation results show that for most of the rendezvous algorithms proposed in the literature the theoretical results provided by the authors are far from the real results achieved by the algorithms. Additionally, in symmetric scenarios, the EJS algorithm has the better results in terms of ETTR and MTTR, while in asymmetric scenarios the FRCH and SSB algorithms outperform the others rendezvous strategies. Key words: Cognitive radio networks, blind rendezvous, rendezvous algorithm.
INTRODUCCIÓN
La creciente demanda y desarrollo de aplicaciones inalámbricas ha propiciado que la escasez de espectro radioeléctrico disponible se haya convertido en un obstáculo para la introducción de nuevas aplicaciones y servicios inalámbricos. La asignación del espectro es realizada mediante licencias por agencias reguladoras que destinan diferentes bandas de frecuencia para tecnologías o servicios específicos por ejemplo: difusión de radio y televisión, redes celulares o redes de datos inalámbricas (WLAN). Esta asignación es realizada de manera fija y solo se exceptúan un pequeño conjunto de bandas de frecuencias como la banda industrial científica y médica, conocida por sus siglas en inglés ISM (Industrial Scientific and Medical).
Algunas mediciones de la utilización del espectro radioeléctrico 1 han demostrado que gran parte del espectro asignado es subutilizado la mayor parte del tiempo. Sin embargo, las bandas libres están siendo insuficientes debido al creciente número de aplicaciones que las utilizan. Las redes radio cognitivas, conocidas por siglas en inglés CRNs (Cognitive Radio Networks) constituyen una tecnología que permite enfrentar el problema de la escasez de espectro radioeléctrico así como el uso eficiente del mismo 2.
En una CRN un conjunto de dispositivos, denominados usuarios secundarios o usuarios cognitivos, sensan el espectro radioeléctrico para identificar las bandas de frecuencia que no están siendo usadas por los usuarios licenciados en estos canales, denominados usuarios primarios. El conjunto de bandas de frecuencias libres de actividad de usuarios primarios se denomina canales disponibles y son usados para la comunicación entre los usuarios secundarios. Para lograr establecer la comunicación, dos usuarios secundarios deben coincidir en una misma banda de frecuencia e intercambiar la información de señalización necesaria. Este proceso es denominado rendezvous y es esencial para el funcionamiento de las CRN.
El diseño de algoritmos para garantizar el rendezvous entre dos usuarios secundarios es particularmente complejo en el contexto de las CRNs, debido fundamentalmente a que el conjunto de canales disponibles identificado por cada usuario secundario puede ser diferente. Numerosos trabajos han sido publicados proponiendo diferentes algoritmos de rendezvous, algunos de ellos consideran la presencia de un canal de control común, identificado por sus siglas en inglés CCC (Common Control Channel) en el cual todos los usuarios secundarios coinciden e intercambian la información de señalización.
Aunque esta variante es la más simple, el CCC se congestiona cuando aumenta el número de usuarios secundarios o el tráfico generado. Otro acercamiento para lograr el rendezvous lo constituyen las secuencias de salto de canal, conocidas por sus siglas en inglés CH (Channel Hopping). En este caso cada usuario secundario salta a través de cada uno de los canales disponibles con «la esperanza» de coincidir en uno de ellos con alguno de sus vecinos, este proceso es conocido como rendezvous ciego. Los algoritmos utilizados para generar las CH son denominados algoritmos o estrategias de rendezvous.
Tradicionalmente el tiempo de rendezvous, conocido por sus siglas en inglés TTR (Time To Rendezvous) ha sido la principal métrica empleada para evaluar el desempeño de estos algoritmos y se define como el tiempo necesario para que dos usuarios secundarios coincidan en un mismo canal e intercambien la información de señalización, es decir, realicen el rendezvous.
Este trabajo se centra en los algoritmos de rendezvous ciego y se describen los principales retos y la clasificación de estos algoritmos en el contexto de las redes radio cognitivas. El principal objetivo de este artículo es comparar algunos de los algoritmos de rendezvous propuestos en la literatura. Aunque existen otros trabajos con similar objetivo, los mismos solo se centran en realizar una comparación atendiendo a los resultados teóricos del tiempo de rendezvous proporcionado por los autores. La principal novedad en este artículo radica en que la comparación que se realiza entre los algoritmos de rendezvous también toma en consideración el desempeño de los algoritmos en escenarios prácticos. Los resultados obtenidos mediante simulación ilustran que para gran parte de los algoritmos tomados en consideración los valores teóricos calculados por sus autores están muy por encima de los valores reales alcanzado.
RETOS DEL RENDEZVOUS EN LAS CRNS
En una CRN, el rendezvous se refiere al proceso mediante el cual dos o más usuarios secundarios intentan encontrarse en un canal comúnmente identificado como disponible e intercambiar la información de señalización.
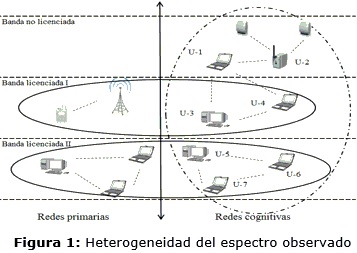
Dentro de una CRN los usuarios secundarios pueden identificar de manera única cada uno de los canales de la red utilizando por ejemplo, las frecuencias de operación. Este conocimiento compartido del área de búsqueda contribuye a simplificar el proceso de rendezvous sin embargo, existen otras características de estas redes que lo complejizan e imponen nuevos retos. En 3 es presentada la heterogeneidad del espectro radioeléctrico observado por cada usuario secundario como el principal reto del rendezvous en estos escenarios.
Con el objetivo de identificar y hacer un uso «oportunista» de aquellas bandas de frecuencia no utilizadas, los usuarios secundarios necesitan sensar los canales de la red con el objetivo de identificar las bandas de frecuencia no utilizadas. A pesar de que han sido desarrolladas algunas técnicas eficientes de sensado 4, este proceso no está libre de errores y algunos de los canales de la red pueden ser erróneamente identificados como disponibles u ocupados.
Las imperfecciones del sensado, unido a las diferencias en la posición geográfica de cada usuario secundario con respecto a los usuarios primarios, hacen que los canales identificados como disponibles por los usuarios secundarios puedan o no coincidir. La Figura 1 muestra un escenario en el cual cada uno de los usuarios secundarios puede acceder a cualquiera de las tres bandas de frecuencia pero solo algunos de ellos perciben igual actividad en los canales de la red primaria, por ejemplo: usuarios 1 y 2; 3 y 4; 5,6 y 7.
Atendiendo a la heterogeneidad del espectro observado, son identificados dos modelos diferentes 5: si los usuarios secundarios comparten los mismos canales disponibles se denomina modelo simétrico, en otro caso se denomina modelo asimétrico. El modelo asimétrico es más general pero las estrategias de rendezvous en este escenario suelen ser más complejas. Ambos modelos son importantes en la práctica y el modelo simétrico es representativo de CRNs donde los usuarios secundarios se encuentran en un área relativamente pequeña 6.
Otro de los retos asociados el rendezvous en el contexto de las CRNs lo constituye el sincronismo entre los usuarios secundarios. Aunque algunos autores han propuesto algoritmos de rendezvous considerando que los usuarios cognitivos están perfectamente sincronizados, el sincronismo es difícil de mantener en estos entornos. Algunos trabajos han propuesto que cada usuario secundario esté equipado con un GPS para garantizar el sincronismo, sin embargo esta alternativa eleva considerablemente el costo de los dispositivos y no es aplicable en todos los escenarios.
CLASIFICACIÓN DE LAS ESTRATEGIAS DE RENDEZVOUS EN LAS CRNS
Las estrategias de rendezvous en las CRNs han sido clasificadas atendiendo a diferentes criterios que son descritos en7. Algunas de ellas han sido definidas teniendo en cuenta la clasificación de los protocolos de acceso al medio en redes con múltiples canales, sin embargo esta clasificación no es adecuada en el entorno de las CRNs y en el trabajo de Lo 3 es realizado un análisis crítico de las limitaciones de cada una de ellas.
Trabajos publicados recientemente 5 han extendido la clasificación atendiendo a la arquitectura de la red que fuera inicialmente presentada en 8 y han utilizado una clasificación tal y como se muestra en la Figura 2.

En los sistemas centralizados, también conocidos como basados en infraestructura, una estación base controla el acceso de los usuarios cognitivos a los canales disponibles. Algunos autores consideran que la estación base opera sobre un canal de control común (CCC) pre-determinado y accesible para todos los usuarios de la red cognitiva. El empleo de un CCC facilita la comunicación entre los usuarios secundarios y la estación base sin embargo, si la comunicación en este canal es interrumpida debido al ruido o a la interferencia, el funcionamiento de toda la red queda comprometido.
La heterogeneidad del espectro es otro de los problemas que degradan el desempeño de esta variante.
Aunque otros trabajos no consideran el empleo de un CCC dedicado, los sistemas basados en infraestructura tienen el inconveniente de tener poca escalabilidad y robustez y el empleo de una estación base puede convertirse en un «cuello de botella» que afecte el desempeño de toda la red 5.
En los sistemas distribuidos el empleo de un CCC es la forma más simple para lograr el rendezvous entre los usuarios secundarios. En esta variante uno de los canales disponibles es asignado como el CCC, funcionando como canal de rendezvous y toda la información de señalización es intercambiada en este canal.
Algunos de los algoritmos desarrollados que utilizan esta variante, consideran un CCC pre-asignado que es compartido por todos los usuarios cognitivos. Sin embargo, debido a la heterogeneidad del espectro observado, considerar la presencia de un CCC global no es factible en la mayoría de los escenarios de las CRNs 5. En 9 se propone agrupar los usuarios secundarios en clusters de acuerdo a los canales disponibles de cada uno y posteriormente seleccionar un CCC entre ellos. Otros autores 7 10 han considerado la selección dinámica del CCC para establecer el rendezvous en aquellos canales donde no es detectada la presencia de usuarios primarios.
Aunque el CCC facilita la comunicación entre los usuarios cognitivos y simplifica el proceso de rendezvous, el empleo de esta variante posee importantes limitaciones. Cuando se detecta actividad de algún usuario primario en el CCC, todos los usuarios secundarios deben abandonar este canal inmediatamente con lo que el desempeño de la CRN se degrada. Además, el aumento en la cantidad de usuarios secundarios o en la carga de tráfico generada, hacen que el CCC se sature y aunque la división de la CRN en clusters contribuye a paliar este problema, los costos en el establecimiento y mantenimiento del CCC son considerables 3.
Debido a estas limitaciones, en los últimos años han sido desarrolladas estrategias de rendezvous sin el empleo del CCC, que son conocidas como rendezvous ciego. Una solución típica al problema del rendezvous ciego es el uso de secuencias de salto de canal (CH) 11, en las cuales cada usuario cognitivo identifica el conjunto de canales disponibles y salta a través de los mismos hasta lograr el rendezvous con alguno de sus vecinos. El algoritmo para generar las secuencias de saltos debe garantizar que dos usuarios secundarios coincidan en un mismo canal en el menor tiempo posible.
Una variante sencilla para generar las CH son los algoritmos aleatorios, en los cuales cada usuario cognitivo decide su propia secuencia de salto de forma aleatoria. La naturaleza aleatoria de estos algoritmos hace que el tiempo máximo de rendezvous no sea finito y por tanto existe la posibilidad de que los usuarios cognitivos nunca coincidan en un mismo canal.
La imposibilidad de los algoritmos aleatorios de garantizar un TTR finito así como las dificultades para alcanzar y mantener el sincronismo, han motivado que numerosos autores consideren algoritmos deterministas para generar las secuencias de salto en escenarios donde los dispositivos no están sincronizados.
CONSIDERACIONES SOBRE SINCRONISMO
En gran parte de los trabajos relacionados con el rendezvous en la redes radio cognitivas que considera que el tiempo está dividido en ranuras y en cada una los usuarios cognitivos saltan a uno de los canales de la red e intentan el rendezvous. Atendiendo a que cada usuario cognitivo intenta el rendezvous en cada ranura de tiempo, la duración de las ranuras de tiempo es un aspecto a considerar en el diseño de las estrategias de rendezvous.
Aún cuando dos usuarios secundarios coincidan en un mismo canal, para completar el rendezvous es necesario que el tiempo que ambos permanecen en este canal sea suficiente para intercambiar la información de señalización. Considerando τ como el tiempo necesario para completar el rendezvous y teniendo en cuenta que el sincronismo entre los usuarios secundarios no es factible, en12 se demuestra que la duración de cada ranura de tiempo debe ser 2τ para garantizar que la superposición entre dos ranuras de tiempo sea suficiente para completar el rendezvous, tal como se muestra en la Figura 3 a).
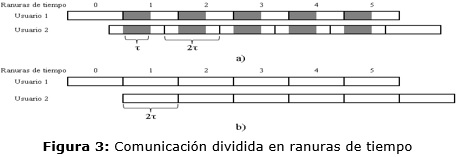
En5 se demuestra que esta consideración es equivalente a que los usuarios secundarios estén sincronizados con respecto al inicio de cada ranura de tiempo (ver Figura 3b)). El valor de τ depende de la estrategia de señalización que implementen los usuarios secundarios, por ejemplo en el estándar 802.22 13 que norma el uso de la redes cognitivas se propone τ=10ms.
INDICADORES DE DESEMPEÑO
El tiempo de rendezvous conocido por sus siglas en inglés como TTR (time to rendezvous) es el parámetro más empleado para evaluar el desempeño de los algoritmos de rendezvous. Gran parte de los trabajos enfocados en el diseño de estos algoritmos5 6 11 12 14 15 consideran el TTR como el número de ranuras de tiempo necesarias para que dos usuarios cognitivos logren el rendezvous. Frecuentemente son empleadas dos métricas diferentes para evaluar el TTR: (i) valor esperado, o promedio, del TTR (ETTR) y (ii) máximo TTR (MTTR).
Estos valores son analíticamente calculados considerando que todos los canales están disponibles para los usuarios secundarios y el principal objetivo de los algoritmos de rendezvous es minimizar el ETTR y garantizar un MTTR finito.
Adicionalmente en15 los autores definen el máximo TTR condicional (MCTTR) como el MTTR cuando no todos los canales están disponibles para los usuarios cognitivos. Nótese que si el valor de MCTTR es finito, los usuarios cognitivos logran el rendezvous aun cuando solo exista un canal comúnmente disponible, en tal caso se dice que las secuencias de saltos garantizan el rendezvous.
Otro elemento que puede ser tomado en consideración para evaluar el desempeño de estos algoritmos es el número de canales en los cuales se produce el rendezvous. En 16 los autores se refieren a este parámetro como diversidad en el rendezvous. Esta métrica es particularmente importante debido a que aún cuando dos usuarios secundarios visiten un canal comúnmente disponible en la misma ranura de tiempo, la comunicación entre ellos puede fallar debido al desvanecimiento, la interferencia o la presencia de otros usuarios secundarios en el canal. En estos casos si los usuarios cognitivos solo coinciden en pocos canales, el rendezvous estará condicionado por las características de estos canales, degradando así el desempeño en términos de TTR.
ALGORITMOS DE RENDEZVOUS PROPUESTOS
Numerosos algoritmos de rendezvous han sido propuestos para resolver el rendezvous ciego. En 16 es propuesto el algoritmo Asynchronous Channel Hopping (ACH) el cual tiene como principal objetivo el diseño de secuencias de salto que garanticen el rendezvous en todos los canales disponibles y los autores emplean el término diversidad en el rendezvous para denotar el número de canales en los cuales ocurre el rendezvous. Primeramente se considera una estrategia basada en roles (ACH-RB) en la cual los usuarios secundarios involucrados en el rendezvous siguen estrategias diferentes para generar las secuencias de salto, de esta forma son diseñadas dos secuencias, una para el usuario secundario transmisor y otra para el usuario secundario receptor.
Seguidamente los autores proponen una estrategia mediante la cual cada usuario secundario alterna entre las secuencias de transmisión y recepción (ACH-CS) con lo que, ambos siguen una estrategia común para generar las secuencias de salto. Recientemente en 17 fue propuesto el algoritmo Simple Role Based (SRB) el cual también constituye un algoritmo basado en roles que supera el algoritmo ACH-RB pero posee la limitante de que solo garantiza el rendezvous en el modelo simétrico.
En18 son propuestas dos estrategias basadas en roles denominadas Rendezvous Couple Channel Hopping (RCCH) y Asynchronous Rendezvous Channel Hopping (ARCH). La primera considera que los usuarios secundarios están perfectamente sincronizados mientras que la otra no. Ambas garantizan el rendezvous en todos los canales de la red, es decir, diversidad máxima en el rendezvous. Además en este mismo trabajo también es presentado el algoritmo Symmetric Asynchronous Rendezvous Channel Hopping (SARCH) que garantiza diversidad máxima en el rendezvous y supone que los usuarios secundarios realizan el sensado del espectro antes de comenzar el proceso de rendezvous. En estos tres algoritmos los autores consideran como requisito indispensable que la cantidad de canales de la red sea par.
De la misma forma que para los algoritmos ACH, RCCH y ARCH, los autores de 19 consideran la diversidad en el rendezvous en el diseño del algoritmo Efficient Channel Hopping (ETCH). Este algoritmo posee dos variantes, una que considera escenarios sincrónicos (SYN-ETCH) y otra en la cual no se requiere de la sincronización entre los usuarios secundarios (ASYN-ETCH). Ambos garantizan diversidad máxima en el rendezvous pero solo funcionan en el modelo simétrico.
Aunque en las variantes del algoritmo ETCH los usuarios secundarios utilizan la misma estrategia para generar las secuencias de salto, cada usuario secundario utiliza un parámetro aleatoriamente seleccionado como semilla para generar su propia secuencia, de esta forma, a pesar de usar el mismo algoritmo las secuencias generadas pueden ser diferente. Este algoritmo constituye una estrategia híbrida entre una estrategia basada en roles y una estrategia común.
Los algoritmos Generated Ortogonal Sequences (GOS), Modular Clock (MC) y Modified Modular Clock (MMC) son propuestos en11. Los algoritmos GOS y MC solo funcionan en el modelo simétrico. En términos de ETTR el desempeño de los algoritmos MC y MMC son superiores al algoritmo GOS, pero ninguno de los dos garantiza el rendezvous. Tanto MC como MMC constituyen estrategias híbridas.
Los algoritmos Channel Rendezvous (CRSEQ) y Deterministic Rendezvous (DRSEQ) y son presentados por los mismos autores en12,14 respectivamente. En ambos algoritmos los usuarios cognitivos siguen una estrategia común para generar secuencias de salto que garantizan el rendezvous. Sin embargo ninguno de los dos garantiza diversidad máxima en el rendezvous. El algoritmo DRSEQ solo funciona en el modelo simétrico y supera los algoritmos GOS, MC y MMC en este escenario.
Todos los algoritmos mencionados anteriormente, excepto el SARCH, consideran que cada usuario secundario sigue las secuencias de salto para visitar todos los canales de la red y una vez en el canal realiza el sensado del espectro para detectar si el mismo está disponible. Esta estrategia es efectiva cuando los canales usados por los usuarios primarios cambian dinámicamente con el tiempo. Sin embargo en escenarios donde no ocurren cambios en la actividad de los usuarios primarios o estos cambios ocurren muy lentamente como por ejemplo en las bandas asignadas a la televisión, el conocimiento previo de la actividad en cada canal contribuye significativamente a minimizar el TTR. De esta forma aún cuando las secuencias de salto sean generadas considerando todos los canales de la red, cada usuario secundario solo visita los canales disponibles. Los algoritmos que se describen a continuación utilizan operaciones de remplazo que sustituyen en las secuencias de salto los canales no disponibles por canales previamente identificados como disponibles.
En20 es propuesto el algoritmo Ring Wlak (RW) el cual presenta dos variantes, RW1 y RW2. Ambas funcionan en el modelo asimétrico pero ninguna de ellas asegura diversidad máxima en el rendezvous. En términos de ETTR el desempeño del algoritmo RW2 es mejor que el del RW1. Tanto en RW1 como en RW2 el desempeño se degrada cuando aumenta el número de usuarios secundarios de la red. Los mismos autores proponen en5 el algoritmo Jump Stay (JS) el cual asegura el rendezvous tanto en el modelo simétrico como en el asimétrico y pero no garantiza diversidad máxima en el rendezvous. Tanto RW como JS emplean una estrategia híbrida para generar las secuencias de salto.
Una variante mejorada el algoritmo JS denominada Enhanced Jump Stay (EJS) es propuesta en6 el cual también es una estrategia híbrida y garantiza diversidad máxima en el rendezvous y obtiene mejores resultados en términos de ETTR y MTTR que el algoritmo JS en el modelo asimétrico pero incrementa ligeramente el MTTR en el modelo simétrico con respecto al JS.
El algoritmo Fast Rendezvous Channel Hopping (FRCH) propuesto en 15 considera una estrategia común para que cada usuario secundario genere las secuencias de salto y en términos de ETTR obtiene mejores resultados que el algoritmo JS. Recientemente en21 se propone el algoritmo Short Sequence Based (SSB) en el cual también se emplea una estrategia común para generar las secuencias de salto, tanto el algoritmo FRCH como el SSB funcionan en ambos modelos (simétrico y asimétrico) pero el SSB supera al FRCH en términos de TTR en el modelo asimétrico.
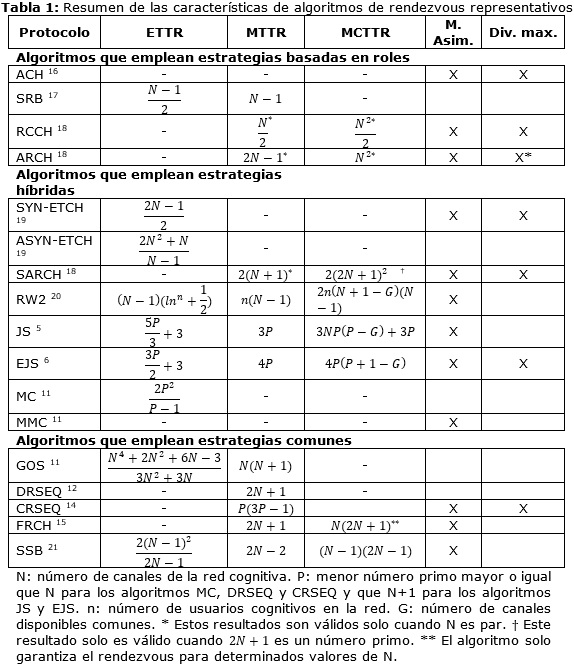
La Tabla 1 resume las principales características de los algoritmos de rendezvous más representativos, ateniendo a la posibilidad de operar en el modelo asimétrico, la posibilidad de establecer diversidad máxima en el rendezvous así como el tipo de estrategia empleada para generar las secuencias de salto. Adicionalmente se han incluido en esta tabla los valores de ETTR, MTTR y MCTTR proporcionado por los autores. Nótese que muy pocos autores realizan el análisis analítico de todas las métricas relacionadas con el TTR.
COMPARACIÓN DE LOS ALGORITMOS DE RENDEZVOUS PROPUESTOS
Aunque a partir de la Tabla 1 se puede establecer una comparación entre los diferentes algoritmos de rendezvous, los resultados mostrados en 21 evidencian que para algunos de los algoritmos de rendezvous propuestos los valores teóricos de ETTR, y MTTR presentados por los autores no se corresponden con el desempeño real alcanzado por los algoritmos. Con el objetivo de evaluar el alcance de las expresiones presentadas en la Tabla 1, en este trabajo se realiza una comparación mediante simulación que considera tres escenarios diferentes y en cada uno de ellos son ubicados dos usuarios secundarios que intentan el rendezvous.
El primero de los escenarios considera que todos los canales de la red están disponibles para los usuarios secundarios. Se considera importante destacar que este escenario es restrictivo debido a que la principal potencialidad de las CRNs es usar oportunistamente los canales libres de actividad de usuarios primarios y por tanto suponer que todos los canales están disponibles no se corresponde con un escenario práctico. Sin embargo, este escenario permite evaluar el alcance de los valores de ETTR y MTTR proporcionados por los autores.
El segundo de los escenarios que será considerado se corresponde con el modelo simétrico en el cual solo un grupo de los canales de la red se encuentra disponible para los usuarios secundarios, pero este conjunto de canales disponibles es el mismo para todos los usuarios secundarios. Por último el tercer escenario considera el modelo asimétrico en el cual no todos los canales están disponibles y el conjunto de canales disponibles percibido por cada usuario secundario no coincide.
Con el objetivo de formalizar cada uno de los escenarios propuestos se considera una CRN con M≥2 usuarios secundarios y N≥2 canales licenciados para los usuarios primarios. Además sea Au⊆{0,1,2,…N-1} el conjunto de canales disponibles para el usuario secundario u∈{1,2,..,M} y G=|∩∀u Au| el número de canales disponibles comunes entre todos los usuarios secundarios de la red, siendo ∩∀u Au la intersección entre el conjunto de canales disponibles de todos los usuarios secundarios y |⋅| el operador de módulo. En correspondencia con esta nomenclatura en la Tabla 2 se describen formalmente cada uno de los escenarios.
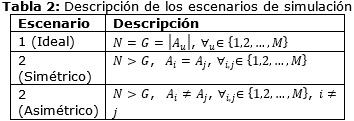
Las simulaciones que se presentan a continuación consideran una CRN con 45 canales disponibles (N=45) en la cual dos usuarios secundarios (M=2) realizan operaciones de sensado para determinar el conjunto de canales disponibles. Para estimar el ETTR y el MTTR son tomados el promedio del TTR y el máximo TTR de 105 simulaciones independientes y en cada una de ellas los usuarios secundarios son inicialmente ubicados en un canal aleatoriamente seleccionado. Son incluidos los resultados de los algoritmos RCCH, ARCH y SARCH presentados 18 debido a que el análisis realizado por sus autores es restrictivo en cuanto al número de canales de la red, de igual forma son excluidos los algoritmos MC y MMC debido a que no garantizan el rendezvous mientras que el SYN-ETCH también se excluye dado que solo funciona en escenarios sincrónicos.
Escenario 1
La Tabla 3 muestra los resultados en el escenario 1 de algunos de los algoritmos de rendezvous propuestos así como los valores teóricos de cada una de las métricas según las expresiones resumidas en la Tabla 1.
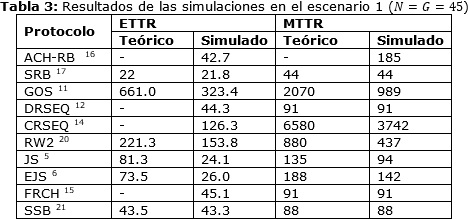
Los resultados presentados en la Tabla 3 evidencian que solo para los algoritmos SRB, DRSEQ, FRCH y SSB los valores teóricos del MTTR se corresponden con los valores obtenidos mediante simulación. En el caso del ETTR los resultados teóricos y simulados coinciden solo para los algoritmos SRB y SSB. En términos de ETTR los menores valores son alcanzados por los algoritmos SRB, JS y EJS, mientras que los algoritmos GOS, RW2 y CRSEQ obtienen valores extremadamente altos tanto para el ETTR como para el MTTR. En el caso del MTTR lo mejores resultados son obtenidos por los algoritmos SRB y SSB. Se considera importante destacar que la estrategia SRB es basada en roles lo cual le ofrece cierta ventaja con respecto al resto de las estrategias (comunes e híbridas), sin embargo el desempeño de este algoritmo es mucho mejor que para el ACH-RB que también constituye una estrategia basada en roles.
Escenario 2
Las simulaciones en este escenario consideran una CRN con N=45, G=|Au| y 5≤G≤45. Las Figuras 4 y 5 muestran los resultados en términos de ETTR y MTTR para algunos de los algoritmos presentados. Nótese que para realizar una comparación justa, solo se incluyen los algoritmos de rendezvous que utilizan el conocimiento previo de la información de sensado para intentar el rendezvous solo en los canales previamente identificados como disponibles. El algoritmo JS no se incluye debido a que su variante mejorada (EJS) posee mejores resultados.
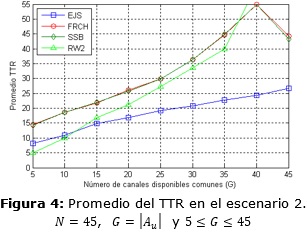
En términos de ETTR (Figura 4) el algoritmo RW2 obtiene mejores resultados que el algoritmo EJS cuando G≤12 sin embargo, de la misma forma que para los algoritmos FRCH y SSB, su ETTR crece rápidamente cuando aumenta el número de canales disponibles comunes. Para G>12 el algoritmo EJS obtiene los mejores resultados entre todos los algoritmos comparados. En este escenario el desempeño de los algoritmos FRCH y SSB es similar. Se considera importante destacar que el desempeño del algoritmo RW2 depende de la cantidad de usuarios secundarios en la red y por tanto no es un algoritmo escalable.
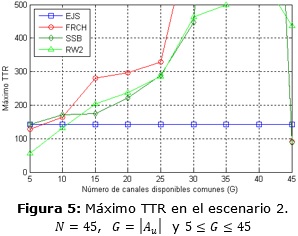
A partir de los resultados mostrados en la Figura 5 se puede comprobar que el MTTR de los algoritmos FRCH, SSB y RW2 crece más rápidemente que para el EJS. El comprotamiento de los algoritmos SSB y RW2 es similar a partir de G>15 mientras que para G>10 el algortimo FRCH obtiene peores valores de MTTR que SSB y RW2.
Escenario 3
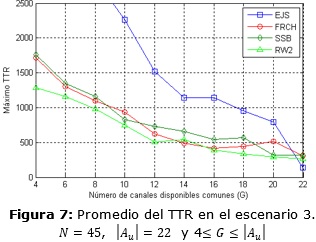
Este escenario es más general con respecto a los escenarios 1 y 2. En este caso se considera un escenario asimétrico en el cual N=45, |Au|=22 y 4≤G≤|Au|. Nótese que en este caso cada usuario secundario solo percibe aproximadamente la mitad de los canales como disponibles y para G<|Au| solo una parte de ellos son comúnmente disponibles. Las Figuras 6 y 7 muestran los resultados de los algoritmos de rendezvous seleccionados y de la misma forma que para el escenario 2 solo se incluyen los algoritmos que utilizan el conocimiento previo del estado de los canales para generar las secuencias de salto.
La Figura 6 muestra que en este escenario los resultados alcanzados por el algoritmo SSB son mejores que para el FRCH especialmente para valores pequeños de G. El desempeño del RW2 es superior al del resto de los algoritmos sin embargo dado que su desempeño está condicionado por la cantidad de usuarios secundarios de la red es de esperar que para redes con múltiples usuarios cognitivos su desempeño se deteriore y por tanto este algoritmo no es escalable. Tanto el SSB como el FRCH superan al EJS para G≤20. Atendiendo al MTTR (Figura 7) el comportamiento de los algoritmos SSB y FRCH son similares y mejores que los resultados alcanzados por el EJS. El RW2 supera al resto de los algoritmos comparados, en este caso debido a que el número de nodos usados en la simulación es el mínimo posible (2). Sin embargo, como se aprecia en la Tabla 1 el desempeño de este algoritmo está condicionado por la cantidad de usuarios secundarios de la red y por tanto al crecer el número de usuarios su desempeño se deteriora.

CONCLUSIONES
En este trabajo se realiza una descripción de los principales retos del rendezvous en redes radio cognitiva así como de la clasificación de los algoritmos de rendezvous y los principales indicadores empleados para evaluar su desempeño en estos entornos. Es realizado un estudio comparativo entre los algoritmos de rendezvous propuestos en la literatura que además de tomar en consideración los resultados teóricos presentados por los autores, también considera el resultado alcanzado por cada algoritmo en escenarios prácticos. Los resultados de las simulaciones evidenciaron que para gran parte de los algoritmos de rendezvous propuestos en la literatura los resultados teóricos proporcionados por sus autores están distantes de los resultados reales alcanzados y solo existe correspondencia entre los resultados teóricos y simulados para los algoritmos SRB y SSB.
En escenarios simétricos el algoritmo EJS obtiene los mejores resultados en la mayoría de los casos tanto en términos de ETTR como de MTTR. Sin embargo en escenarios asimétricos el algoritmo EJS es ampliamente superado por los algoritmos FRCH y SSB y este último también supera el algoritmo FRCH cuando el número de canales disponibles es pequeño. En el caso del algoritmo RW2, a pesar de obtener buenos resultados en algunos de los escenarios considerados, su desempeño está condicionado por la cantidad de nodos de la red y por tanto no es una estrategia escalable.
REFERENCIAS
1. HARRISON, K., MISHRA, S. M. & SAHAI, A. How Much White-Space Capacity Is There? in 2010 IEEE Symp. New Front. Dyn. Spectr. 1-10 (IEEE, 2010). doi:10.1109/DYSPAN.2010.5457914
2. ITU-R REPORT. Definitions of Software Defined Radio (SDR) and Cognitive Radio System (CRS). 3 (2009). at <http://www.itu.int/pub/R-REP-SM.2152>
3. LO, B. F. A survey of common control channel design in cognitive radio networks. Phys. Commun. 4, 26-39 (2011).
4. YUCEK, T. & ARSLAN, H. A survey of spectrum sensing algorithms for cognitive radio applications. IEEE Commun. Surv. Tutorials 11, 116-130 (2009).
5. LIU, H., LIN, Z., CHU, X. & LEUNG, Y. Jump-stay rendezvous algorithm for cognitive radio networks. IEEE Trans. Parallel Distrib. Syst. 23, 1867-1881 (2012).
6. LIN, Z., LIU, H., CHU, X. & LEUNG, Y.-W. Enhanced Jump-Stay Rendezvous Algorithm for Cognitive Radio Networks. IEEE Commun. Lett. 17, 1742-1745 (2013).
7. LO, B. F., AKYILDIZ, I. F. & AL-DHELAAN, A. M. Efficient Recovery Control Channel Design in Cognitive Radio Ad Hoc Networks. IEEE Trans. Veh. Technol. 59, 4513-4526 (2010).
8. AKYILDIZ, I. F., LEE, W.-Y. & CHOWDHURY, K. R. CRAHNs: Cognitive radio ad hoc networks. Ad Hoc Networks 7, 810-836 (2009).
9. LIU, S., LAZOS, L. & KRUNZ, M. Cluster-Based Control Channel Allocation in Opportunistic Cognitive Radio Networks. IEEE Trans. Mob. Comput. 11, 1436-1449 (2012).
10. BAEK, Y. et al. Movable Rendezvous Channel Selection for Distributed Cognitive Radio Networks. 2012 Spring Congr. Eng. Technol. 1-4 (2012). doi:10.1109/SCET.2012.6342032
11. THEIS, N. C., THOMAS, R. W. & DASILVA, L. A. Rendezvous for Cognitive Radios. IEEE Trans. Mob. Comput. 10, 216-227 (2011).
12. YANG, D., SHIN, J. & KIM, C. Deterministic rendezvous scheme in multichannel access networks. Electron. Lett. 46, 1402 (2010).
13. IEEE STANDARD FOR INFORMATION TECHNOLOGY— Local and metropolitan area networks— Specific requirements— Part 22: Cognitive Wireless RAN Medium Access Control (MAC) and Physical Layer (PHY) specifications: Policies and procedures for operation in the TV. 1-680 (2011). doi:10.1109/IEEESTD.2011.5951707
14. SHIN, J., YANG, D. & KIM, C. A Channel Rendezvous Scheme for Cognitive Radio Networks. IEEE Commun. Lett. 14, 954-956 (2010).
15. CHANG, G.-Y. & HUANG, J.-F. A Fast Rendezvous Channel-Hopping Algorithm for Cognitive Radio Networks. IEEE Commun. Lett. 17, 1475-1478 (2013).
16. BIAN, K. & PARK, J. J. Maximizing Rendezvous Diversity in Rendezvous Protocols for Decentralized Cognitive Radio Networks. IEEE Trans. Mob. Comput. 12, 1294-1307 (2013).
17. GUERRA, E. O., REGUERA, V. A., SOUZA, R. D., BRANTE, G. & FERNANDEZ, E. M. G. Simple role-based rendezvous algorithm for cognitive ad hoc radio networks. Electron. Lett. 50, 182-184 (2014).
18. CHANG, G.-Y., TENG, W.-H., CHEN, H.-Y. & SHEU, J.-P. Novel Channel-Hopping Schemes for Cognitive Radio Networks. IEEE Trans. Mob. Comput. 13, 407-421 (2014).
19. ZHANG, Y. et al. Channel-Hopping-Based Communication Rendezvous in Cognitive Radio Networks. IEEE/ACM Trans. Netw. PP, 11 (2013).
20. LIU, H., LIN, Z., CHU, X. & LEUNG, Y.-W. Ring-Walk Based Channel-Hopping Algorithms with Guaranteed Rendezvous for Cognitive Radio Networks. in 2010 IEEE/ACM Int'l Conf. Green Comput. Commun. 755-760 (IEEE, 2010). doi:10.1109/GreenCom-CPSCom.2010.30
21. REGUERA, V., GUERRA, E., SOUZA, R., FERNANDEZ, E. & BRANTE, G. Short Channel Hopping Sequence Approach to Rendezvous for Cognitive Networks. Commun. Lett. 18, 1-4 (2013).
Recibido:13 de enero de 2015
Aprobado: 23 de mayo de 2015
Erik Ortiz Guerra, Departamento de Electrónica y Telecomunicaciones de la Universidad Central «Marta Abreu» de Las Villas, Villa Clara, Cuba. E-mails:erik@uclv.edu.cu, vitalio@uclv.edu.cu

