










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería Electrónica, Automática y Comunicaciones
versión On-line ISSN 1815-5928
EAC vol.37 no.3 La Habana sept.-dic. 2016
ARTÍCULO ORIGINAL
Aplicación de Técnicas de Control Óptimo a una plataforma estacionaria cuatrimotor
Application of optimal control techniques to a quadmotor stationary platform
Gerson Beauchamp Báez, Rafael Batista
Departamento de Ingeniería Eléctrica del Recinto Universitario de Mayagüez (RUM) de la Universidad de Puerto Rico (UPR), Puerto Rico.
RESUMEN
El estudio de las técnicas de control óptimo es de interés en varias aplicaciones que requieran controlar sistemas dinámicos complejos, uno de estos casos son los vehículos aéreos no tripulados (UAV). Los UAV han sido utilizados en diversos campos como: ingeniería civil, agricultura, manejo de desastres, etc. Dichos UAV requieren estrategias de control que garanticen su estabilidad, rechacen los disturbios externos y el ruido en las medidas. Se presentan los resultados obtenidos aplicando técnicas de control óptimo a una plataforma de vuelo estacionaria propulsada por cuatro motores. Se hace un análisis comparativo de los resultados obtenidos con los distintos controladores. Como criterios de comparación se utilizaron las especificaciones de desempeño de la respuesta temporal y se computó el índice de desempeño para cada estrategia implementada. El análisis incluye el desarrollo del modelo dinámico de la plataforma de vuelo estacionario mediante las ecuaciones de movimiento de Euler-Lagrange, obteniendo un sistema MIMO descrito por seis ecuaciones de estado y cuatro entradas. La primera técnica de control óptimo estudiada fue el regulador cuadrático lineal (LQR) junto con estimador del vector de estado. Esta implementación requirió la evaluación de distintas matrices de peso Q y R del índice de desempeño hasta obtener una respuesta satisfactoria del sistema. La siguiente estrategia fue la implementación del controlador LQ con filtro de Kalman (regulador cuadrático lineal Gaussiano, LQG) y el uso de Loop Transfer Recovery (LTR) para recobrar las características de robustez del LQR. Los resultados obtenidos muestran la viabilidad de aplicar dichas técnicas de control óptimo a vehículos aéreos, obteniendo los mejores resultados para la técnica del LQG con LTR.
Palabras claves: Control óptimo, vehículos aéreos no tripulados, LQR, filtro de Kalman, Loop Transfer Recovery.
ABSTRACT
The study of optimal control techniques is of interest in various types application which required the control of complex dynamical systems, one of this cases are Unmanned Aerial Vehicles (UAV). UAV have been used in diverse fields such as: civil engineering, agriculture, disaster management, etc. Such UAV require control strategies that guarantee their stability, reject external disturbances and measurement noise. The results obtained when applying optimal control techniques to a stationary platform, powered by four motors, are presented. A comparative analysis of the results for the different controls obtained is made. For this comparison, performance specifications of the time response were used and the performance index was calculated for each implemented strategy. The analysis includes the development of the steady state platform dynamic model by means of Euler-Lagrange equations of motion, obtaining a MIMO system described by six state equations and four inputs. The first optimal control technique studied was the linear quadratic regulator (LQR) with a state-observer. This implementation required the evaluation of different performance index weight matrices Q and R until a satisfactory response of the system was obtained. The next technique studied was the implementation of the LQ controller with Kalman filter (linear quadratic Gaussian regulator, LQG) and the use of Loop Transfer Recovery (LTR) to recover the robustness characteristics of LQR. Results obtained show the viability of applying such optimal control techniques to unmanned aerial vehicles, obtaining the best results with the LQG/ LTR technique.
Key words: Optimal control, unmanned aerial vehicles, LQR, Kalman filter, Loop Transfer Recovery.
1.- INTRODUCCIÓN
El auge en el uso de sistemas aéreos no tripulados (UAV, por sus siglas en inglés) en diversos campos del conocimiento muestra como esta tecnología provee soluciones a distintas problemáticas que afectan a nuestra sociedad. Varias aplicaciones para sistemas UAV se pueden encontrar en [1-4]. Por este motivo, es de gran interés el estudio de técnicas de control que ayuden a mejorar el desempeño de sistemas UAV.
En la literatura, varios investigadores han utilizado diferentes estrategias de control para sistemas UAV. Entre ellos: Proporcional-Derivativo (PD) [5], Proporcional-Integral-Derivativo (PID) [6], LQR con observador asintótico o exponencial [7-9] y Regulador Cuadrático de Seguimiento [10]. En [6] establecen la desventaja de utilizar un PID para los sistemas UAV. En cambio, el controlador LQR es considerado como una técnica adecuada para la estabilización de sistemas con comportamiento dinámico complejo como son los UAV [7]. La estrategia de control óptimo mediante LQR permite que todos los estados sean pesados (retroalimentación completa del vector de estado) al momento de determinar la acción de control requerida sobre todas las entradas del sistema [11], siendo esto una ventaja del control óptimo en comparación con técnicas de control clásico. Sin embargo, se hace necesario hacer un análisis comparativo de las distintas estrategias de control óptimo disponibles, de forma que se pueda tener un punto de partida para la selección de la estrategia adecuada para estos sistemas UAV. Este trabajo propone utilizar una plataforma de vuelo estacionario con tres grados de libertad para comparar el desempeño de distintas estrategias de control óptimo y de estimación del vector de estado. Para comparar cada una de estas técnicas se utilizará como criterio la respuesta temporal del sistema así como el índice de desempeño de cada una de las estrategias implementadas. Los resultados muestran como la estrategia de control mediante regulador cuadrático lineal Gaussiano (LQG) combinada con la técnica de Loop Transfer Recovery (LTR) es la técnica de control que resulta en el mejor desempeño para nuestra plataforma.
Este documento está organizado de la siguiente manera: la sección 2 presenta la derivación del modelo dinámico de la plataforma de vuelo estacionario; la sección 3 presenta el diseño del Regulador Cuadrático Lineal (LQR); la sección 4 presenta el diseño del observador asintótico; la sección 5 presenta la aplicación de la técnica de Loop Transfer Recovery (LTR) con filtro de Kalman y la sección 6 presenta los resultados para los diferentes controladores propuestos utilizando MATLAB® y Simulink®. Se incluye además una conclusión y una lista de referencias.
2.- MODELO DEL SISTEMA
La plataforma de vuelo estacionaria utilizada es la "3 DOF Hover" de Quanser® [12] y sirve como punto de referencia para el diseño del sistema de control para un vehículo aéreo no tripulado (En este caso un Quadcopter). Este sistema consiste en una plataforma, con cuatro motores, montada en una base que rota en tres ejes. Los motores frontal y posterior, controlan el ángulo de elevación y giran en dirección contraria a las manecillas del reloj. En contraste, los motores izquierdo y derecho, controlan el ángulo de rotación y giran a favor de las manecillas del reloj. Esto permite que el torque total del sistema esté balanceado. Las medidas de las tres posiciones son tomadas por tres codificadores ópticos con una resolución de 8192 cuentas por revolución. El modelo dinámico del sistema tiene seis variables de estado y cuatro entradas. Las variables de estado son las posiciones y velocidades angulares de los ejes y las entradas son los voltajes aplicados a los motores. El modelo del sistema se deriva del diagrama de cuerpo libre ilustrado en la Fig. 1.
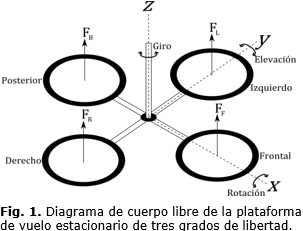
En la Fig. 1 se observa que el plano donde descansan los motores está compuesto por los ejes de elevación y de rotación y el eje perpendicular a estos es el giro. Además, la distancia del centro de cualquier motor al punto de intersección de los ejes es igual a LA= 0.197m. Se presume que la fuerza aplicada por cada motor es normal al mismo. Es importante notar que, debido a que la plataforma de vuelo es estacionaria, nuestro modelo dinámico no incluye los efectos de la fricción del aire, fuerza de la gravedad, fuerza centrífuga ni el efecto Coriolis. Definimos F, B, R y L (por sus siglas en inglés) como frontal, posterior, derecho e izquierdo; además, definimos y, p y r (por sus iniciales en inglés) como los ejes de giro (yaw), elevación (pitch) y rotación (roll).
Para obtener un modelo matemático que describa la dinámica del sistema, se formulan primero las ecuaciones de movimiento de Euler - Lagrange, de la forma:
Donde L - Lagrangiano,
z - Vector de coordenadas generalizadas,
τ- Vector de torque generalizado aplicado al sistema.
Definiendo a L= EC - EP =T-U como el Lagrangiano, que es la diferencia entre la energía cinética y la energía potencial de nuestro sistema, se tiene

Donde Jp = 0.552kg⋅m2, Jr=0.552 kg⋅m2 y Jy= 0.110kg⋅m2 son, respectivamente, los momentos de inercia de la elevación, rotación y el giro. Se presume que la energía potencial es cero ya que la plataforma de vuelo es estacionaria.
Se definen las coordenadas generalizadas (z i) como los ángulos de los ejes de giro (y), elevación (p) y rotación (r)

Computando (1) con la L dada en (2) y aplicando los torques externos generalizados τi, resulta



El vector de torques generalizados del sistema es
que son los torques que producen los motores en cada eje y donde KTN, KTC son las constantes de torque y KFN, KFC son las constantes de fuerza. Además, V es el voltaje aplicado al motor; donde el sub-índice designa el motor correspondiente. Finalmente, las ecuaciones de movimiento de Euler-Lagrange son:



Colocando las ecuaciones (8), (9) y (10) en forma matricial, resulta

Debido a que los cuatros motores son idénticos se tiene que KTN= KTC= KT= 0.0036 N·m/V y KFN= KFC= KF= 0.1188 N/V. Resolviendo para las aceleraciones angulares y definiendo las velocidades angulares, se obtiene la siguiente representación del sistema en variables de estado
Definiendo las variables de estado y las entradas del sistema como

Resulta
Definiendo además las salidas del sistema como y1= y, y2= p, y3= r y sustituyendo los parámetros físicos del sistema, resulta la representación en variables de estado
donde x(t) ∈ R6- vector de estado,
u(t) ∈ R4- vector de entradas,
y(t) ∈ R3- vector de salidas medidas.
Dada esta representación en variables de estado del sistema, se pueden evaluar tres propiedades importantes: controlabilidad, observabilidad y estabilidad. El sistema es inestable por naturaleza debido a que todos sus polos se encuentran en el origen del plano complejo. Por otro lado, el sistema es totalmente controlable y totalmente observable por lo que es posible diseñar controladores que lo estabilicen y observadores que estimen sus variables de estado.
3.- DISEÑO DEL CONTROLADOR LQR
El problema de control óptimo para el regulador cuadrático lineal (LQR) implica minimizar el índice de desempeño

donde S(T) ≥ 0, Q ≥ 0 y R > 0.
En el controlador LQR, las matrices de peso Q y R se convierten en los parámetros de diseño. La matriz Q es la matriz de peso para los estados intermedios, la matriz R es la matriz de peso para la acción de control del sistema y la matriz S(T) representa el peso del estado final x(T). La dinámica de la planta es

con la ley de control

Para lograr el objetivo de control se necesita determinar una ley de control (17) que minimice (15). Para lograr este resultado se requiere resolver la siguiente ecuación diferencial de Riccati

Si se considera que (18) tiene una solución en estado estacionario, el problema ahora se convierte en un problema de horizonte en infinito en donde la ecuación diferencial de Riccati (DRE) se torna en una ecuación algebraica de Riccati (ARE) [13] de la forma

Con índice de desempeño

En (20) ya no es necesario pesar el estado final ya que, cuando el sistema es asintóticamente estable, x(t) →0 según t→∞. Resolviendo (19) se obtiene el valor de la ganancia de Kalman mediante

Finalmente, la acción de control para el controlador LQR con horizonte en infinito es

Por lo que el sistema a lazo cerrado es

La matriz Q ha sido elegida como una matriz diagonal de dimensión seis en la que solamente se pesan los productos (xi)2, i=1, 2, …, 6 donde qi es el peso para cada producto. Estos pesos deben ser elegidos de forma tal que se logre un buen desempeño en la respuesta temporal del sistema.
El criterio utilizado para la elección de los valores de la diagonal de la matriz de peso Q dependió de la respuesta del sistema y del valor del índice de desempeño. En el caso de la matriz R (peso a las entradas), se colocó el mismo peso a los cuatro motores. Para los pesos de las entradas se utilizó como criterio que el peso fuera igual al inverso del cuadrado del voltaje máximo de la acción de control (10 voltios), ri=(1/10)2= 0.01.
4.- OBSERVADOR ASINTÓTICO
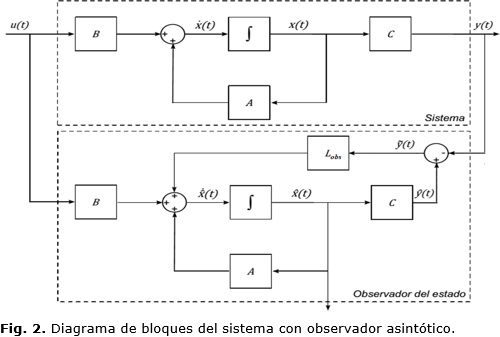
Son pocos los sistemas que permiten medir todo el vector de estado para ser retroalimentado. Por tal motivo, se utiliza un observador asintótico para estimar el vector de estado según se ilustra en la Fig. 2. Se puede retroalimentar el estimado del vector de estado  (t) y se obtienen resultados satisfactorios [13,14]. El problema de diseño del observador asintótico consiste en escoger la ganancia Lobs de forma tal que el error en el estimado sea igual a cero y no se afecte el desempeño del sistema.
(t) y se obtienen resultados satisfactorios [13,14]. El problema de diseño del observador asintótico consiste en escoger la ganancia Lobs de forma tal que el error en el estimado sea igual a cero y no se afecte el desempeño del sistema.
La Fig. 2 muestra el diagrama de bloques del sistema (parte superior) conectado a un observador del estado (parte inferior). La ganancia Lobs se escoge de forma tal que el sistema (A – LobsC) tenga polos estables, tomando en cuenta que estos polos deben ser asignados de forma tal que sean cinco o diez veces más rápidos que los del sistema de lazo cerrado para evitar que la dinámica del observador se mezcle con la dinámica del sistema de lazo cerrado.
Para diseñar un observador del estado, se tiene el sistema original
Se establece el sistema del observador como

Dado que  , entonces
, entonces

El estimado de la salida se define como

Definiendo el error como  , resulta en la dinámica del error
, resulta en la dinámica del error

o

De modo que el error tenderá asintóticamente a cero si los polos de (A – LobsC) son estables. De ahí el nombre "asintótico" del observador.
5.- DISEÑO DE CONTROLADOR LQG/LTR
El diseño del LQG implica la superposición de un regulador cuadrático lineal (LQR) junto a un estimador óptimo. El estimador óptimo reconstruye el vector de estado a partir de medidas contaminadas con ruido. Esto se conoce como el filtro de Kalman. Dicha técnica utiliza teoría de probabilidad para tratar las incertidumbres. Este estimador óptimo se considera un filtro ya que tiene buena capacidad para rechazar ruido.
Estableciendo el sistema lineal con ruido blanco en el proceso w(t) y ruido blanco en las medidas v(t), se tiene

Definiendo las matrices de covarianza del ruido en el proceso QN y del ruido en las medidas RN, se desarrolla el filtro de Kalman. Para determinar la ganancia del filtro de Kalman se resuelve la ecuación algebraica de Riccati (ARE, por sus siglas en inglés) de la forma

La solución de la ARE de Kalman es la matriz P, la covarianza del error del sistema en estado estacionario. Dada P se computa la ganancia del Filtro de Kalman mediante

El Filtro de Kalman es similar al sistema del observador asintótico,

donde es el estimado óptimo del vector de estado. La combinación del controlador LQR junto al Filtro de Kalman constituye el regulador cuadrático lineal Gaussiano (LQG).
5.1.- REGULADOR CUADRÁTICO LINEAL GAUSSIANO (LQG)
El regulador cuadrático lineal Gaussiano es una técnica de diseño de control óptimo que minimiza un índice de desempeño cuadrático así como costos del esfuerzo de control en presencia de disturbios gaussianos y desviaciones del modelo [15]. Se presume que el control de retroalimentación del vector de estado tiene la forma

Donde K es la ganancia obtenida mediante la técnica de LQR y r(t) es la referencia de entrada. Al sustituir el control en (30), el sistema de lazo cerrado es

y el Filtro de Kalman es

Esto implica que el controlador LQR se combina con el filtro de Kalman para producir un regulador dinámico en virtud del principio de separación de Kalman. El regulador LQG es una superposición del regulador cuadrático lineal (LQR) y el estimador cuadrático lineal (LQE) [16]. Cabe destacar que la técnica de LQG reduce la robustez del sistema, por lo cual se buscan métodos auxiliares para resolver dicha limitación.
5.2.- LOOP TRANSFER RECOVERY (LTR)
La técnica de LTR se aplica cuando se desea que el regulador cuadrático lineal Gaussiano (LQG) recobre las propiedades de robustez de la retroalimentación del vector de estado que presenta el regulador cuadrático lineal (LQR). Usando el método de LTR, el filtro de Kalman se diseña de manera que la robustez asociada con el diseño de LQR se recupere asintóticamente [17]. El diseño LQG/LTR recobra las propiedades de robustez deseadas junto a un buen desempeño. En este método, las formas deseadas para valores singulares de la función de sensibilidad de la planta de lazo cerrado deben ser diseñadas en un problema LQG y estos valores singulares son recuperados en la entrada o en la salida de la planta real mediante sintonización sucesiva de la ganancia en un problema de LQR [18].
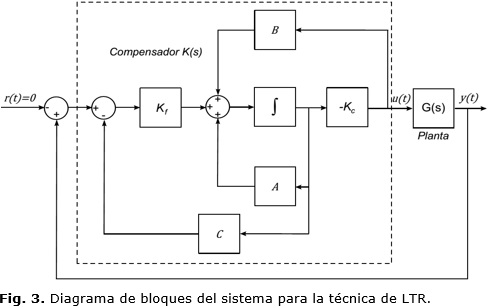
La Fig. 3 muestra el diagrama de bloques para el diseño LQG/LTR. El recobro se hace en la entrada (recobro de sensibilidad) si se sintoniza la matriz de ganancia Kf. Por otro lado, si se sintoniza la matriz de ganancia Kc, el recobro se hace en la salida (recobro de robustez). El recobro de robustez está sujeto a las siguientes condiciones [19]:
Sea m el número de salidas del sistema y sea r el número de entradas al sistema, entonces
a) G(s) debe ser una matriz cuadrada
b) Para recobro en la entrada, G(s) debe ser de fase mínima (no debe tener ceros de transmisión en el lado derecho del plano complejo) con m ≥ r. Para recobro en la salida, m ≤ r y se debe cumplir el resto de las condiciones para recobro en la entrada.
En el sistema propuesto, el número de entradas es mayor que el número de salidas. De modo que solo es posible el recobro en la salida.
5.2.1- RECOBRO EN LA SALIDA
Siguiendo [19], se define la matriz de transición de lazo abierto como Φ=(sI-A)-1, la ganancia del lazo del filtro de Kalman es

Definiendo Φr=(sI-A+BK)-1, la matriz de transición del sistema con el regulador, la ganancia del lazo del regulador en la salida es:

Se requiere diseñar una ganancia K de modo que L0r(s) se aproxime a CΦL0. Se define entonces el índice de desempeño

Con la Q de la forma presentada por Doyle (1981) en [19]

donde Q0 > 0 es la Q del LQR y C es la matriz de la salida del sistema. A medida que q tiende a infinito se obtiene el resultado deseado

El procedimiento para diseñar el LTR es el siguiente: se utiliza la ganancia de recobro q para modificar la Qo original del LQR (40) y se mantiene el valor original de R. Se dibujan las cotas de robustez a partir de la ganancia del lazo del Filtro de Kalman (37) y mediante las gráficas de los valores singulares del sistema se determina si se alcanzan los objetivos de robustez. De no ser así, se aumenta q hasta satisfacer las cotas de robustez. Con el valor Q obtenido de (40) se vuelve a resolver el problema del control LQR y se obtiene la nueva ganancia para K que recobra la robustez del LQR en la salida.
6.- RESULTADOS
Esta sección presenta los resultados de una serie de experimentos realizados para validar la propuesta de este trabajo. Se tienen resultados de simulaciones y las respuestas reales del sistema que sirven como base para el análisis comparativo propuesto. Para este proceso de comparación se utilizó el desempeño de la respuesta temporal resultante de cada una de las estrategias de control así como el valor del índice de desempeño.
Se presentan resultados para el Regulador cuadrático lineal (LQR) con observador asintótico, el regulador cuadrático lineal Gaussiano (LQG) y finalmente los resultados de aplicar la técnica de Loop Transfer Recovery (LTR) al LQG.
6.1- LQR CON OBSERVADOR ASINTÓTICO
Para obtener los resultados que se muestran a continuación, se construyó un instrumento virtual para la simulación e implantación de la estrategia de control LQR con observador asintótico, todas nuestras pruebas fueron realizadas con la plataforma real de Quanser® y el sistema de control en tiempo real Quarc® integrado a la suite MATLAB\Simulink®.
Para el diseño del regulador LQR se utilizaron las siguientes matrices Q y R:

El problema del regulador cuadrático lineal se resuelve mediante MATLAB® utilizando el comando "lqr", el cual requiere como parámetros de entrada las matrices del modelo A y B en (14) y las matrices de peso Q y R en (42). Con estos valores se obtiene la siguiente ganancia K para el sistema de lazo cerrado con retroalimentación del vector de estado.

Debido a que no contamos con las medidas de todas las variables de estado de nuestro sistema, fue necesario diseñar un observador asintótico para estimar el valor de estas. Para localizar los polos del observador se utilizó el comando "place" de MATLAB® de forma tal que los polos del observador quedaran en s = -24, -27, -32, -34, -37, -40.
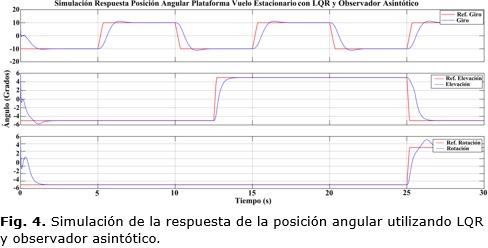
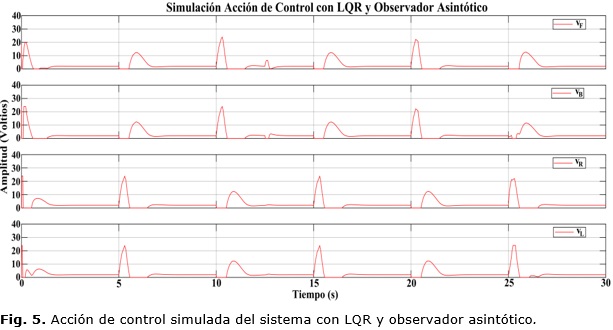
A continuación, se muestran las respuestas obtenidas de la simulación del sistema con el esquema de control propuesto. En la Fig. 4 se observa que el sistema responde de manera adecuada y que el error en estado estacionario tiende a cero. La Fig. 5 muestra la acción de control simulada y se observa que los voltajes de los motores nunca alcanzan su máximo (24 VDC), por lo que con el diseño propuesto para la estrategia LQG se espera obtener un buen desempeño al implantar el controlador en el sistema real.
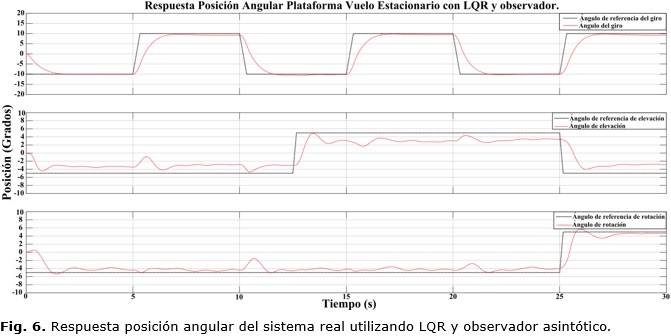
En la Fig. 6 se muestra la respuesta real obtenida al implantar el controlador mediante LQR. Para implantar el sistema de control se utilizó el sistema de tiempo real Quarc® desarrollado por Quanser®. En la Fig. 6 se observan pequeños errores y oscilaciones en los ángulos de elevación y rotación en comparación con la respuesta simulada (Fig. 4).
6.2- LQG
Para validar el desempeño del Filtro de Kalman, se aplicó una onda cuadrada al mando del ángulo de giro de ±20 grados. La Fig. 7 compara la velocidad angular del giro estimada con filtros derivativos de primer orden y la estimada por el Filtro de Kalman propuesto. Para resolver la ARE del filtro de Kalman utilizamos el comando "kalman" de MATLAB® con matrices de covarianza del ruido en el proceso, QN, y de covarianza del ruido en las medidas, RN con los siguientes valores.

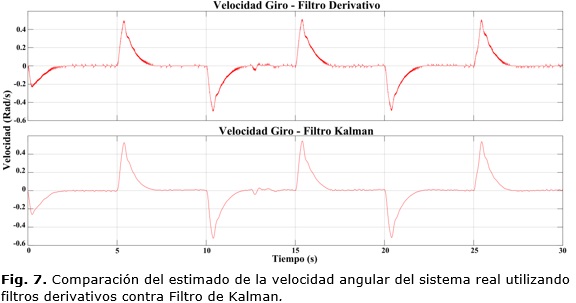
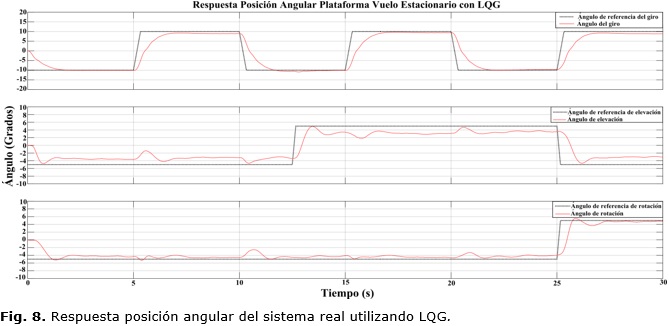
En la Fig. 7 se observa que el Filtro de Kalman provee una estimación con poco ruido en comparación con un filtro derivativo de primer orden. Solo se muestra la estimación de la velocidad angular del giro, pero se obtuvieron resultados similares para la estimación de la velocidad angular de la elevación y la estimación de la velocidad angular de rotación. La Fig. 8 muestra la respuesta real obtenida al implementar el control mediante LQG sin aplicar LTR, se observa que se mantiene un buen desempeño del sistema, muy similar al de LQR (Fig.6).
6.3- LQG\LTR
Para determinar el valor de la ganancia de recobro del sistema q, se utilizaron las gráficas de los valores singulares que se muestran en la Fig. 9. Las cotas de robustez se obtienen a partir de la respuesta deseada del lazo del Filtro de Kalman, se observan los valores singulares del sistema con un regulador LQG sin aplicar LTR y los valores singulares del sistema con un regulador LQG\LTR aplicando una ganancia de recobro q = 1000. Según lo esperado, los valores singulares se acercan a la cota de robustez al aumentar la ganancia de recobro. Para obtener estas grafica se utilizó el comando "ltry" de MATLAB® junto al mando "sigma" para graficar las cotas de robustez.
Es importante destacar que el recobro de robustez aumenta la ganancia del sistema, esto conlleva el riesgo de que la acción de control se sature [20], lo que introduce no-linealidades e inestabilidad al sistema. Por tal razón, solo fue posible aumentar la ganancia de recobro hasta q = 1000.
A continuación se muestra la nueva matriz de peso Q' del controlador LQR luego de ser modificada por la ganancia de recobro elegida. Además, se utilizó el comando "lqr" de MATLAB® para obtener el nuevo valor para la ganancia de retroalimentación Kc de nuestro sistema de lazo cerrado. El valor de la matriz de peso R se mantuvo inalterado.
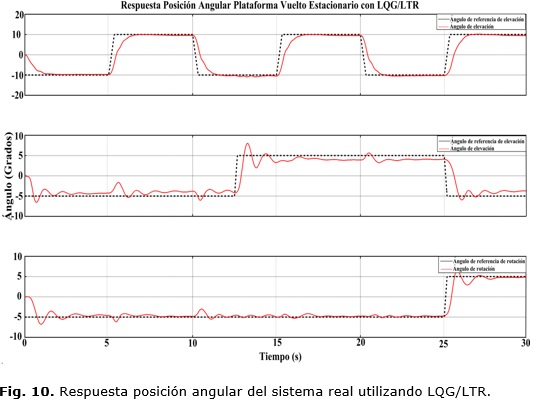
En la Fig. 10 se muestra la respuesta obtenida para las posiciones angulares del sistema luego de realizar el recobro de robustez en la salida. Al comparar con la respuesta obtenida en la Fig. 7, se observa un menor tiempo de asentamiento y la disminución del error en estado estable. Además, el regulador LQG\LTR presenta una mayor ganancia para frecuencias bajas (rechazando variaciones en los parámetros del proceso) y una menor ganancia de lazo para altas frecuencias (rechazando ruido en las medidas), ambos efectos aumentan la robustez del sistema [13]. Este hecho fue observado al aplicar disturbios al sistema.
Finalmente, en la Tabla 1 se presenta el valor del índice de desempeño (20) computado para cada una de las estrategias implementadas. Es interesante notar que la diferencia entre cada valor es pequeña. Por tal razón, en nuestro caso, el criterio principal para seleccionar la mejor estrategia de control ha sido el desempeño de la respuesta temporal del sistema.
7.- CONCLUSIONES
Los resultados obtenidos demuestran la viabilidad de aplicar la estrategia de control LQG/LTR para aeronaves con configuración similar a la de nuestra plataforma de vuelo estacionario. Con el diseño del filtro de Kalman fue posible estimar de manera satisfactoria las variables de estado, disminuyendo el nivel de ruido de las estimaciones y mejorando la respuesta de nuestra acción de control. Además, se observó que al aplicar la técnica de LTR, mejoró la respuesta de nuestro regulador LQG.
Finalmente, este trabajo propone el impulsar la utilización de técnicas de control óptimo en vehículos aéreos no tripulados para seguir mejorando el desempeño de dichos vehículos que cada vez cobran más importancia en diversos tipos de aplicaciones.
REFERENCIAS
1. Santano D, Esmaelli H. Aerial videography in built heritage documentation: The case of post-independence architecture of Malaysia. International Conference on Virtual Systems & Multimedia (VSMM). Hong Kong, China, 2014. p. 323-328
2. Tianyu L, Yongzhe L, Juntong Q, Xiangdong M, Jiandal H. Modeling and controller design of hydraulic rotorcraft aerial manipulator. Proceedings of the 2015 27th Chinese Control and Decision Conference, CCDC 2015. Qingdao, China, 2015. p. 5446-5452
3. Lin J, Tao H, Wang Y, Huang Z. Practical application of unmanned aerial vehicles for mountain hazards survey. 2010 18th International Conference on Geoinformatics. IEEE; 2010. p. 1–5.
4. Zang W, Lin J, Wang Y, Tao H. Investigating small-scale water pollution with UAV Remote Sensing Technology. World Automation Congress (WAC), 2012. 2012. p. 2–5.
5. Lara D, Sanchez A, Lozano R, Castillo P. Real-time embedded control system for VTOL aircrafts: Application to stabilize a quad-rotor helicopter. In: 2006 IEEE Conference on Computer Aided Control System Design. IEEE; 2006. p. 2553–2558.
6. Ataka A, Tnunay H, Inovan R, Abdurrohman M, Preastianto H, Cahyadi A. Controllability and observability analysis of the gain scheduling based linearization for UAV quadrotor. In: 2013 International Conference on Robotics, Biomimetics, Intelligent Computational Systems. IEEE; 2013. p. 212–218.
7. Navajas GHT, Raad JAP, Prada SR. Concurrent design optimization and control of a custom designed quadcopter. In: 2015 16th International Conference on Research and Education in Mechatronics (REM). IEEE; 2015. p. 63–72.
8. Castillo P, Lozano R, Dzul A. Stabilization of a mini-rotorcraft having four rotors. In: 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE; 2004. p. 2693–2698.
9. Argentim L, Rezende W, Santos P, Aguiar R. PID, LQR and LQR-PID on a quadcopter platform. In: 2013 International Conference on Informatics, Electronics and Vision (ICIEV). IEEE; 2013. p. 1–6.
10. Suicmez EC, Kutay AT. Optimal path tracking control of a quadrotor UAV. In: 2014 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE; 2014. p. 115–25.
11. Ali Q, Montenegro S. Explicit Model Following Distributed Control Scheme for Formation Flying of Mini UAVs. IEEE Access. 2016;4:397–406.
12. Quanser Consulting. LABORATORY GUIDE: 3 DOF Hover Experiment for MATLAB® /Simulink® Users. Ontario (Canada): Quanser Consulting; 2013.
13. Lewis FL, Vrabie DL, Syrmos VL. Optimal Control. New Jersey(USA): John Wiley & Sons, Inc; 2012.
14. Dufour P, Flila S, Hammouri H. Observer Design for MIMO Non-Uniformly Observable Systems. IEEE Transactions on Automatic Control. 2012 Feb;57(2):511–6.
15. Hendrix CD, Veth MJ, Carr RW. LQG control design for a hovering micro air vehicle using an optical tracking system. In: 2009 IEEE Aerospace conference. IEEE; 2009. p. 1–14.
16. Imran RM, Akbar Hussain DM, Zhe Chen. LQG controller design for pitch regulated variable speed wind turbine. In: 2014 IEEE International Energy Conference (ENERGYCON). IEEE; 2014. p. 101–5.
17. Nand Kishor, Saini RP, Singh SP. LQG / LTR controller for speed governing of hydro-turbine. In: Proceedings of the 12th IEEE Mediterranean Electrotechnical Conference. IEEE; 2004. p. 1125–1128 Vol.3.
18. Zarei J, Montazeri A, Reza Jahed Motlagh M, Poshtan J. Design and comparison of LQG/LTR and H∞ controllers for a VSTOL flight control system. Journal of the Franklin Institute. 2007 Aug;344(5):577–94.
19. Doyle J, Stein G. Multivariable feedback design: Concepts for a classical/modern synthesis. IEEE Transactions on Automatic Control. 1981 Feb;26(1):4–16.
20. Chen BM, Saberi A, Sannuti P. A new stable compensator design for exact and approximate loop transfer recovery. Automatica. 1991;27(2):257–80.
Recibido: 5 de agosto de 2016
Aprobado: 17 de noviembre de 2016
Gerson Beauchamp Báez. Departamento de Ingeniería Eléctrica del Recinto Universitario de Mayagüez (RUM) de la Universidad de Puerto Rico (UPR), Puerto Rico. Correo electrónico: gerson@ece.uprm.edu.


{kind=link}
{kind=link}
{kind=link}