










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. -INTRODUCCIÓN
La Central Hidroeléctrica (CHE) "Robustiano Silverio León Cabrera", es una planta de alta caída con estanque de regulación por temporadas. Es la CHE más grande de Cuba con 43 MW de potencia instalada distribuida en sus tres unidades de generación: dos con generadores alemanes y una con generador checo. Las dos primeras de 14 MW y la tercera de 15 MW. Todas con turbinas Francis verticales. Esta planta es única de su tipo en Cuba con una estructura civil soterrada a más de 250 metros bajo tierra. Es la encargada del ajuste ¨rápido¨ de la frecuencia del Sistema Electro-energético Nacional (SEN) en los rangos que pueden oscilar desde 59.60 a 60.05 Hz. Le fue designada esta función dada su rápida respuesta para aportar potencia activa al sistema.
Las unidades uno y dos, antes de la modernización actualmente en curso, contaban con un gobernador estadounidense mecánico-hidráulico marca Woodward del tipo HR con péndulo de Watt, en explotación desde el año 1954, el elemento de acción final de cada uno estaba compuesto por dos motores de corriente directa, los cuales habían sufrido disímiles roturas. En el año 2013 se importa un nuevo gobernador, electrónico-digital, modelo HAUCK Hydraulik - Technik, procedente de Alemania, para sustituir el existente en la Unidad 1. Este, a pesar de estar dotado de una automática a base de un Controlador Lógico Programable (PLC, Programmable Logic Controller) con comandos sobre válvulas solenoides de acción proporcional, no contaba con los algoritmos necesarios para lograr el control de potencia activa y el control secundario de la frecuencia, muy necesarios para el objetivo concreto de funcionamiento de la Unidad. Tal problemática fue identificada por especialistas de la Empresa de Tecnologías de la Información y Automática ATI-Villa Clara en el año 2014.
Para solucionarla se trazó el objetivo de implementar algoritmos para el control de la potencia activa y la regulación secundaria de frecuencia, a base de PLC, para lograr una adecuación del regulador modelo HAUCK Hydraulik - Technik, a las funciones asignadas a la Unidad 1 de la CHE por el Despacho Nacional de Carga (DNC) de la Unión Eléctrica de Cuba. El presente trabajo ilustra los fundamentos teóricos que sustentan el control de frecuencia y de potencia activa en un sistema electro-energético, muestra los elementos y el esquema de conexión empleados en la solución dada y, por último, prueba la validez de la propuesta a través de gráficas del comportamiento de la potencia activa de la unidad en función de la frecuencia eléctrica del SEN.
1.1.- FUNDAMENTOS DEL CONTROL DE FRECUENCIA
La regulación de frecuencia en todo sistema electro-energético es de suma importancia. De ella se derivan los índices de calidad y eficiencia de la energía para sistemas de potencias interconectados. La calidad de la energía distribuida a los consumidores depende en gran medida de mantener la frecuencia y la tensión dentro de ciertos márgenes especificados, con un servicio estable, continuo y de costo mínimo [1].
Alcanzar parámetros adecuados de calidad de la energía suministrada depende de lograr un adecuado equilibrio entre demanda y generación. Para conseguirlo se necesita de cierta capacidad de generación en reserva con la suficiente velocidad de respuesta para conseguir este equilibrio.
De acuerdo con [2] las plantas designadas para esta operación deben tener las siguientes características:
Ser operativas y flexibles, o sea capaces de tomar y liberar carga de manera estable, rápida y económica.
Contar siempre con una reserva rodante suficiente para satisfacer demandas en horarios picos y mantener un margen para aumentar generación en casos necesarios.
Poseer una habilitación y permiso especial para hacer estos ajustes.
Por tanto, los requisitos técnicos de operación son más exigentes.
En el caso de Cuba, son pocas las plantas que cumplen los requisitos para ser utilizadas en esta función. La CHE Hanabanilla por su principio de funcionamiento es una de las centrales eléctricas de respuesta más rápida del país. Ello unido a otros elementos permite que sea la única en realizar el ajuste ¨rápido¨ de la frecuencia en el SEN.
En un sistema de generación eléctrica la frecuencia de la onda de tensión debe permanecer dentro de ciertos límites para que la calidad de la energía se considere en condiciones aceptables. Las desviaciones de la frecuencia pueden producir afectaciones por vibraciones en las turbinas de vapor que hacen imprescindibles el acortamiento de los períodos de mantenimiento[3]. Asimismo la regulación de la frecuencia asegura constancia en la velocidad de motores sincrónicos y de inducción, además es factor primordial que determina y detecta cualquier desequilibrio entre demanda y generación eléctrica.
Existen tres niveles de regulación de frecuencia: primaria, secundaria y terciaria, representados en la Figura 1.
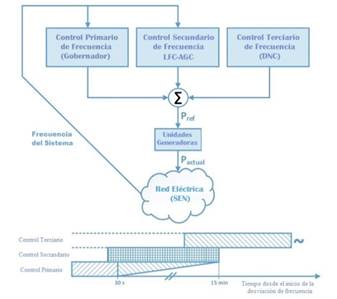
La Regulación Primaria de Frecuencia (RPF) es el primer nivel de la jerarquía del sistema de control y presenta la respuesta más rápida. El control que se encarga de aplicarla presenta una característica proporcional [2,3] y se realiza de manera local y automática. Los generadores que participan en dicho control aumentan o disminuyen su potencia activa de acuerdo a su pendiente de regulación para compensar los desequilibrios entre la generación y la demanda en los Sistemas Eléctricos de Potencia (SEP) [2,4,5]. Este responde a cambios dinámicos del sistema y asegura que la variable frecuencia permanezca dentro de un rango recomendado [6]. Su función principal es tratar de modificar automáticamente la generación en un intervalo entre 0 y 30 segundos [2,5-7].
La Regulación Secundaria de Frecuencia (RSF) es el siguiente nivel de control. Es un control que se realiza en la mayor parte de los sistemas en el mundo de manera centralizada a través de los Controles Automáticos de la Generación (AGC, Automatic Generation Control), cuya función es restablecer los valores de frecuencia a parámetros nominales y liberar la reserva primaria que se utilice ante perturbaciones en el sistema. No tiene responsabilidad alguna en evitar deslastres de carga por baja frecuencia ante la ocurrencia de perturbaciones súbitas en los SEP [4]. Opera una vez haya actuado el control primario. Se efectúa en forma manual o automática aumentando o disminuyendo la inyección de potencia al sistema para mantener la variable de frecuencia en su rango establecido [2,6]. Su respuesta se da aproximadamente a partir de los 30 segundos de sucedido el evento hasta los 10 minutos [8]. Es un control de acción integral o proporcional integral [2,9]. Sus tres objetivos principales son: mantener la frecuencia del sistema en un valor muy cercano al nominal, mantener el valor correcto de los intercambios de potencia en las líneas de enlace entre áreas de control y mantener la generación de cada unidad en el valor más económico, cumpliendo con los programas de despacho asignados por el operador del sistema.
La regulación secundaria en Cuba se realiza de forma descentralizada a diferencia de lo que se plantea en la bibliografía especializada y lo que se hace en los sistemas eléctricos más robustos del mundo. El SEN no cuenta con un AGC por lo que las máquinas que participan en la regulación secundaria de la frecuencia deben contribuir a restablecer la frecuencia a los valores establecidos en la zona muerta de regulación de manera independiente (60Hz +/- 0.1Hz). En otras palabras, siempre que la frecuencia esté por debajo de 60.00 Hz la unidad tiene que subir potencia hasta que la frecuencia alcance dicha banda muerta o la unidad alcance su máxima carga. Si la máquina alcanza su máxima potencia sin restablecer la frecuencia a 60.00 Hz, debe permanecer en ese punto mientras la frecuencia esté por debajo de la banda muerta y solo puede bajar su carga cuando la frecuencia supere la banda muerta (60.1) Hz [4]. Es necesario aclarar que para realizar un buen control de la frecuencia no basta con tener un PLC comandando el control con las exigencias mencionadas en las unidades generadoras. Para ello es necesario poseer un AGC con control centralizado que realice esta acción de manera económica evitando una posible sobre y desregulación de la frecuencia eléctrica del sistema [3], siendo esta una debilidad del sistema electro-energético cubano.
La Regulación Terciaria de Frecuencia (RTF) es el nivel más alto de control y establece los puntos de ajuste de estado estacionario en función de los requisitos del sistema para un flujo de potencia óptimo. Este tipo de regulación no se realiza de manera automática. El operador del sistema es responsable de su manejo con el objetivo de recuperar los valores de frecuencia en caso de que sea agotada la reserva secundaria y liberar margen de reserva primaria y secundaria de acuerdo a la estrategia propia de cada sistema [4,8]. Es mucho más lento que los RPF y RSF. Su objetivo es cambiar el despacho para restablecer las reservas de control secundario, gestionar posibles problemas de cuellos de botella y devolver la frecuencia y los valores de intercambio al estado deseado [7]. Se considera reserva terciaria todas las unidades sincronizadas al sistema o no que tengan posibilidad de completar su potencia activa en menos de 15 minutos después de dada la orden [4,5]. Dada las condiciones de Cuba es el DNC quien da la orden para la entrada de nuevas unidades al sistema, por consiguiente es el DNC el operador del sistema encargado de la regulación terciaria.
La frecuencia eléctrica está determinada por la frecuencia mecánica de giro del rotor del generador y el número de polos de este, que permanece fijo. Según [10]
 (1)
(1)
Entre más polos existan en el campo giratorio, menor será la velocidad de rotación necesaria para cierta frecuencia. Por ejemplo, un generador síncrono de 10 polos como los de la CHE Hanabanilla, tendrán que girar a 720 rpm para generar una frecuencia de 60 Hz.
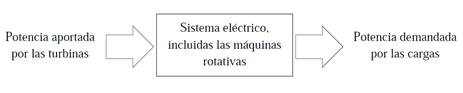
En condición de estabilidad la fuerza acelerante aplicada por la turbina sobre un generador síncrono es igual a la fuerza electromagnética que tiende a frenar la máquina. Por tanto la velocidad se mantiene constante, y también la frecuencia. Si en un momento existe un desequilibrio, por ejemplo aumenta la carga, es decir aumenta la potencia eléctrica demandada en el sistema, entonces aumenta el par electromagnético en los generadores, estos comienzan a frenarse, y la frecuencia eléctrica tiende a disminuir [5]. Mientras un sistema opera en régimen permanente, la potencia mecánica entrante al sistema desde las turbinas es igual a la potencia eléctrica consumida por las cargas, descontando las pérdidas. Esta relación se muestra gráficamente en la Figura 2. Si aumenta la potencia eléctrica consumida por las cargas, pero la potencia mecánica aportada por las turbinas permanece constante, el incremento de demanda sólo puede obtenerse de la energía cinética almacenada en las máquinas rotativas. La reducción de la energía cinética en los generadores síncronos equivale a la disminución de su velocidad de giro, de modo que cae la frecuencia eléctrica del sistema. Si no actuase algún mecanismo corrector, las variaciones de carga en el SEP provocarían un colapso del sistema en pocos minutos [5].
Por consiguiente, mantener el control de la frecuencia en parámetros aceptables garantiza un equilibrio de generación/consumo. El control de este equilibrio se logra a través de un elemento imprescindible en plantas de generación eléctrica convencionales: el gobernador o regulador de velocidad.
1.2.- FUNDAMENTOS DEL GOBERNADOR O REGULADOR DE VELOCIDAD
Según [11] los conceptos básicos de un gobernador de velocidad es mejor ilustrado si se considera una unidad generadora aislada, provista de una carga local, como la representación de la Figura 3.
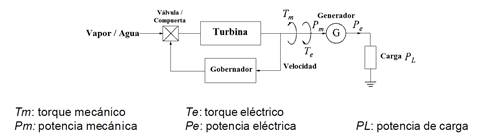
Cuando existe una variación de la carga (PL) instantáneamente tiene lugar un cambio en el torque eléctrico de salida (Te) del generador. Esto causa una desigualdad entre el torque mecánico (Tm) y el torque eléctrico. En la siguiente figura está representando la función transferencial que relaciona la velocidad angular del rotor como una función del torque eléctrico y mecánico.

Por consiguiente, el gobernador ante una disminución de la carga eléctrica debe producir una orden de cierre tal que el torque creado por la turbina sea igual al ejercido por la carga eléctrica sobre el generador, logrando así que la velocidad retorne al valor deseado.
La mayoría de los controles primarios de frecuencia son proporcionales y aplican control droop de velocidad.
Un control primario de frecuencia se explica teóricamente suponiendo un generador isócrono aplicado a un único generador de un sistema [2,5,11,12]. Con el fin de comprender el mecanismo de regulación de frecuencia se considera un sistema de control que cierre el lazo entre el error de la frecuencia y potencia mecánica mediante una acción integral como el visto en la Figura 5:

Este sistema de control ante un error negativo de la frecuencia aumenta la potencia mecánica aplicada sobre el eje, lo cual tiende a reducir el error de frecuencia [2,5,12]. El efecto integrador del regulador hace que el régimen permanente se alcance cuando el error de frecuencia es cero.
Este regulador, conocido como regulador isócrono porque mantiene la frecuencia constante en régimen permanente, funcionaría correctamente en un sistema aislado donde exista un único generador sincrónico, o bien donde el resto de los generadores no participan en el control primario de frecuencia [2,5,11,12]. Sin embargo, si en un mismo sistema dos generadores ejecutan este tipo de regulación, ambos competirían entre sí para alcanzar su propia velocidad de referencia, y el comportamiento del sistema sería inestable. A esto se refiere como un control astático o isócrono, donde no se tiene en cuenta la realimentación y claramente no es el tipo de control deseado para generadores interconectados.
Como en un sistema eléctrico es deseable que un elevado número de generadores participen en la regulación primaria, el regulador isócrono no se aplica en la práctica. Para permitir que varios generadores participen en el control primario de frecuencia dentro de un mismo sistema, se aplica en cada uno de ellos una característica frecuencia-potencia en régimen permanente negativa, mediante la introducción del lazo de control adicional representado en la Figura 6.

Examinando el diagrama de bloques de la figura, puede comprobarse que la constante R es la que determina la característica del regulador en régimen permanente. La constante R se conoce como estatismo (speed droop) de un generador, y es igual a la relación entre el incremento relativo (por unidad) de velocidad ∆ωr o de frecuencia ∆f y el incremento relativo de potencia de salida ∆Pm. El control droop se caracteriza porque un cambio en la potencia de salida de la turbina es proporcional a la variación de la frecuencia como se ilustra en la Figura 7[2,5,11], este control se aplica generalmente como control primario de frecuencia.
Por ejemplo R= 5% significa que una variación del 5% en la frecuencia causa un cambio de la potencia de salida del 100%. Los siguientes valores son indicativos del estatismo permanente de diferentes unidades:
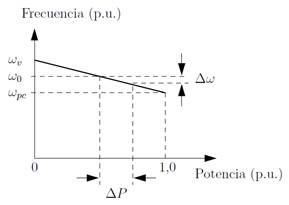
La presencia del estatismo provoca la aparición de un error en la frecuencia en régimen permanente según la Figura 8, al contrario de lo que sucedía en el caso del regulador isócrono, esto está dado porque el control droop es un control proporcional directo carente de acción integral que asegure cero error en estado estable.

Mientras que un control secundario de la frecuencia/potencia se realiza generalmente con controles tipo PI (Proporcional Integral) y PID (Proporcional Integral Derivativo) [2,7]. Para ello puede implementarse un control que utilice la característica droop de cada generador síncrono haciendo uso de la señal de error modificada dada la relación entre velocidad y carga. Este tipo de control se puede ajustar modificando la entrada de referencia "set point" de generación o variador de carga de la unidad.
El efecto de este ajuste está ilustrado en la Figura 9, la cual muestra una familia de características de regulación de velocidad en paralelo para diferentes ajustes del variador de velocidad.
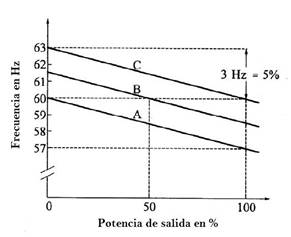
Cuando dos o más generadores están operando en paralelo la característica de regulación de velocidad de cada unidad establece la proporción de carga tomada por la unidad por actuación de la RPF. Cuando ocurre un cambio repentino de la carga del sistema se mueve la característica de velocidad hacia abajo o hacia arriba. La potencia de salida del generador a una frecuencia de referencia o nominal puede ser ajustada a un valor deseado únicamente ajustando la referencia de carga. La RSF ejerce su acción de control sobre los variadores de carga de las unidades bajo RSF. Cuando dos o más generadores participan en la RSF, la señal en el variador de carga de cada unidad establece la proporción de carga que debe cubrir ante una variación en la carga del sistema.
Cuando un generador alimenta una carga aislada los ajustes en el variador de carga modifican la velocidad de rotación. Sin embargo en un sistema multi-máquina los ajustes en el variador de carga modifican muy levemente la frecuencia del sistema dependiendo del tamaño relativo de la unidad frente a la generación total del sistema.
Estos conceptos básicos son las herramientas teóricas para la regulación de velocidad que tienen a los gobernadores o reguladores de velocidad como elemento central para ejercer el control. Los mismos pueden ser clasificados en cuatro tipos: mecánicos o hidráulicos, electro-hidráulicos, PID analógicos y electrónico-digitales [13].
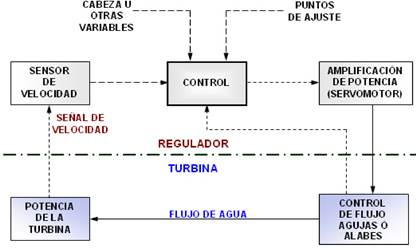
Podemos destacar tres elementos característicos de un regulador de velocidad: el sensor de velocidad, el elemento de control y el dispositivo o elemento amplificador de potencia. En la Figura 10 se representa su interrelación y la interacción con la turbina.
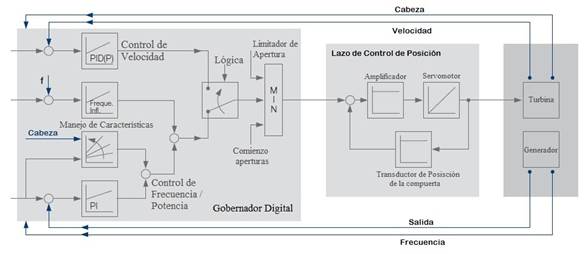
La estructura de un gobernador electrónico digital se ilustra en la Figura 11. Allí aparecen los lazos para el control de velocidad mecánica de la turbina, la regulación primaria de frecuencia y el control secundario de frecuencia y/o potencia. Los dos últimos actúan al unísono y de forma excluyente con el primero. La selección realizada sirve como valor de referencia al lazo de posición del pistón o servomecanismo que actúa sobre el sistema turbina-generador. Desde este se realimentan señales al gobernador que le permiten conocer el estado del sistema y actuar en consecuencia.
2. IMPLEMENTACIÓN DEL ALGORITMO DE CONTROL
El gobernador HAUCK Hydraulik - Technik no cumplía precisamente con las características antes descritas. Está compuesto por un PLC Wago 750-881 con módulos de entrada salida para la adquisición de variables como: velocidad de la turbina, posición del pistón del servomecanismo, niveles de aceite del tanque del gobernador, temperatura del aceite y presión del hidroacumulador. Los módulos de salida se encargan del arranque de la bomba de aceite, comando a electroválvulas de control y seguridad y el gobierno del módulo PARKER PWD00A-400, encargado del accionamiento de las electroválvulas proporcionales de corriente directa que manejan el control de posición [15]. La Figura 12 muestra una imagen del gobernador.

Luego de analizar la programación del PLC se concluye que el esquema de control es el mostrado en la Figura 13 y que se carece de un control de potencia activa y de regulación de frecuencia tanto primaria como secundaria una vez sincronizada la unidad.
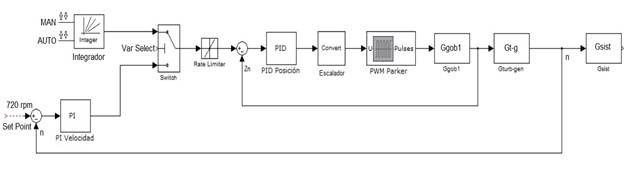
Como se observa en el diagrama en bloques del regulador de velocidad de la Unidad 1 solo cuenta con un lazo interno de regulación de posición indispensable para que el movimiento del servomecanismo sea comandado por un sistema de control con realimentación de posición. Mientras el lazo exterior no es más que el control de velocidad mecánica de la turbina que opera en el momento de sincronizar la unidad. Durante este proceso el gobernador es comandado por la excitatriz quien da órdenes (pulsos) f+ o f- hacia el gobernador y V+ o V- hacia el Regulador Automático de Voltaje (AVR, Automatic Voltage Regulator), hasta lograr el proceso de sincronización de la unidad. Una vez sincronizada la unidad el gobernador solo queda a expensas de que el operador manualmente de la orden de subir o bajar potencia a la unidad.
Por ello se adoptó la estrategia de implementar la RSF y el control de la potencia activa. Para ello se empleó un PLC ABB de la serie AC500 CPU PM573ETH con sus módulos de entrada salida conectados al PLC Wago del regulador, pero sin interferir con la lógica de control de este, que permitiera manejar el posicionador PARKER.
El AC 500 CPU PM573ETH es un autómata de altas prestaciones y de excelente calidad en sus componentes electrónicos, ideal para trabajo continuo en ambientes industriales. Se acoge al estándar de programación europeo CoDeSys integrando perfectamente sus bibliotecas de módulos y bloques funcionales con su hardware, usando como herramienta integradora de proyecto el software Control Builder Plus PS501.
Otros elementos fundamentales empleados como entrada al sistema de control son las mediciones de la frecuencia eléctrica del sistema y de la potencia activa de la unidad. La variable sobre la que actúa el control es siempre la válvula de admisión a la turbina. Para ello se instalaron:
1-El transductor de frecuencia Kainos Select modelo KF-N con rango de entrada de 58 a 62 Hz y ambos con salida normalizada de 4 A 20 mA.
Destinado para la conversión lineal de la frecuencia de la corriente alterna en una señal eléctrica unificada de corriente continua.
2-El transductor de potencia activa Kainos Select modelo KW-1/3 con relación de transformación 1000 a 5 A ,14400 a 120V y de 0 a 20 MW.
Destinado para la transformación lineal de la potencia activa de circuitos trifásicos de corriente alterna con señal de salida unificada de corriente continua con aislamiento galvánico.
La lógica de control consistió en establecer 3 modos de trabajo: Régimen de Frecuencia, Régimen de Potencia y Manual.
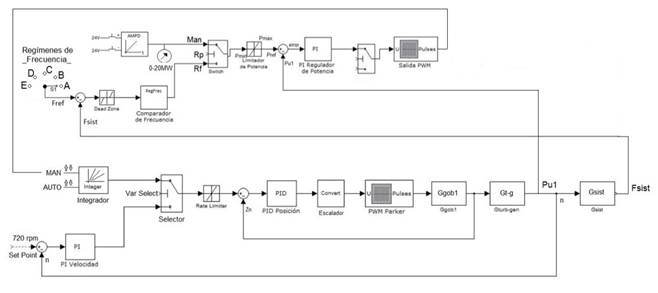
El primero asegura el control automático de la frecuencia, a través del manejo de la potencia (RSF). El segundo posibilita que se trabaje con una carga fija, regulada automáticamente, sin importar la frecuencia del sistema (control de potencia) y el tercero permite a los operadores realizar la regulación manual de la frecuencia/potencia. La Figura 14 ilustra el esquema de control del automatismo realizado para RSF y/o potencia.

En la programación del algoritmo se adoptaron los rangos de frecuencia mostrados en la Tabla 1. Ellos son preestablecidos por el DNC y son empleados por los operadores para conmutar según la decisión del mismo.
Tabla 1 Rangos de regulación de frecuencia que prefija el DNC para la CHE Hanabanilla
| Rango | A | B | C | D | E |
|---|---|---|---|---|---|
| Frec. Sup. (Hz) | 60.05 | 59.95 | 59.85 | 59.75 | 59.65 |
| Frec. Ref. (Hz) | 60.00 | 59.90 | 59.80 | 59.70 | 59.60 |
| Frec. Inf. (Hz) | 59.95 | 59.85 | 59.75 | 59.65 | 59.60 |
La frecuencia del SEN, medida con el KF-N se compara con esos rangos y la lógica implementada verifica y corrige el valor, haciendo uso del cambio de la referencia de carga, de manera que se cumpla con lo deseado. Por tanto, si el comparador verifica que el valor medido está por debajo o por encima de la banda deseada con una histéresis superior a 0.01Hz, un integrador cambia la referencia del lazo de regulación de potencia, variando el error en el lazo, por consiguiente esta es la nueva referencia o "set point" que toma el regulador PI de potencia para ajustar el lazo. La salida del sistema es un modulador de ancho de pulso (PWM, Pulse Width Modulator) que gobierna las electroválvulas proporcionales, permitiendo el paso o cierre del aceite a las recámaras del servomecanismo o pistón de movimiento de las paletas de la turbina. Esto se traduce en un aumento o disminución de la potencia mecánica en la turbina aportando con la generación a la regulación de frecuencia del SEN, hasta donde permita la potencia activa nominal diseñada para este. En la Figura 15 se esquematiza la conjunción del automatismo implementado y el existente en el PLC WAGO.
El control de potencia opera de manera similar. Cuando se selecciona este régimen se realimenta, a la entrada del regulador, la potencia de la unidad, medida con el KW-1/3. Sobre la base de la diferencia entre este valor y el deseado, el AC500 emite una salida que sirve como referencia al WAGO para dar un "set point" al lazo de posición.
3. RESULTADOS Y DISCUSIÓN
Las pruebas que se le hicieron al sistema fueron las siguientes:
Simulaciones de comportamiento de la unidad ante pérdida de carga rápida del sistema electroenergético.
Simulaciones de bajos niveles de frecuencia dentro de los regímenes establecidos por el DNC.
Simulaciones de toma de carga manual y automático ante fluctuaciones de la frecuencia del Sistema Eléctrico.
Pruebas con carga real de forma aislada y en conjunto con las demás unidades generadoras de la CHE.
Durante la puesta en marcha del sistema se ajustaron los valores concernientes a la pendiente de toma de cargas y pendiente de liberación de cargas caracterizada por parámetros mecánicos de respuesta del gobernador y estatismo permanente de la unidad. Estos parámetros ligados estrechamente con el tiempo de respuesta del control secundario quedaron definidos en 15 MW/min. Teniendo en cuenta que la potencia activa que genera la unidad por diseño es de 17450 kVA, aproximadamente 15 MW según [16], se puede decir que el regulador responde ante una caída o subida abrupta de la frecuencia, en aproximadamente un minuto. Con ello aporta al sistema su potencia máxima o la libera en aproximadamente el mismo tiempo. Esto último trae consigo, la ventaja del ahorro significativo de agua.
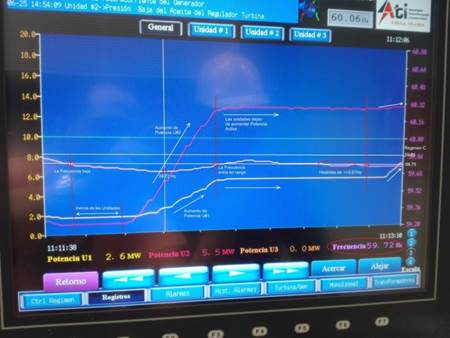
En la Figura 16 se aprecia el resultado de una prueba representativa de lo anteriormente explicado. Puede observarse como la potencia de la unidad cae de 15 MW a 0 MW en menos de 1 minuto con el consecuente decrecimiento de la frecuencia del SEN de 60.1 Hz a 59.9 Hz.

Otro resultado importante está relacionado con la regulación de la frecuencia ante variaciones de carga más dinámicas en el tiempo. Se evaluó si la unidad era capaz de responder a estas variaciones aportando o liberando potencia activa para estabilizar el valor de frecuencia eléctrica del SEN. Analizando la Figura 17 se aprecia que la frecuencia del SEN sale del Régimen C en una ocasión (por aumento). En consecuencia la potencia de la unidad disminuye desde aproximadamente los 11.5 MW hasta los 5 MW, con lo que aporta a la estabilización de la frecuencia en ese régimen en un tiempo menor a 40 s.

Por su parte la Figura 18 muestra una experiencia similar, pero con la frecuencia cayendo fuera del Régimen C en tres ocasiones durante poco menos de dos minutos. Como se aprecia, la potencia de la unidad aumentó en dos casos. Solo no lo hizo cuando la salida no sobrepasó el valor de la histéresis.
Cabe destacar que la unidad en cuestión, al igual que sus similares, está limitada para la regulación secundaria de frecuencia ante caídas abruptas de frecuencia, sostenidas en el tiempo. Cada una, solo es capaz de aportar el total de potencia activa para la cual está diseñada, lo cual podría ser insuficiente para estabilizar el valor de frecuencia de todo el SEN. Tratándose de una central hidroeléctrica que a pesar de ser la más grande del país solo puede aportar 43 MW de los 6280 MW de potencia instalada en Cuba hasta el 2015, siendo el consumo total de 20288 GW/h para una generación de 20288 GW/h por parte del SEN, según [17]. Por ello la función de la planta es regular la frecuencia en rangos estrechos y aportar de manera rápida la potencia necesaria para tratar de estabilizar la frecuencia en estos rangos definidos. En casos más críticos de variaciones de carga, entrarían a cumplir su función las centrales termoeléctricas designadas para el control secundario de la frecuencia, que a pesar de ser más lentas en su respuesta cuentan con mayor reserva de potencia disponible para asumir grandes variaciones.
4. CONCLUSIONES
Con la implementación de los algoritmos aquí descritos se logra el control automático de la potencia activa y la regulación secundaria de la frecuencia eléctrica del SEN, diseñando los tres modos de operación: Régimen de Potencia, Régimen de Frecuencia y Modo Manual. Para ello fue necesaria la interpretación del gobernador diseñado en Alemania, añadiéndole las funciones de las cuales estaba desprovisto y ajustando su funcionamiento a los requisitos previstos por la UNE (Unión Eléctrica de Cuba) para esta unidad.
A través de las pruebas realizadas se pudo comprobar que la respuesta del control realizado cumple con los requisitos y exigencias que establece el DNC para lograr el control secundario de la frecuencia en plantas generadoras de energía. Además el tiempo de respuesta del gobernador se adecua satisfactoriamente al exigido para realizar estas funciones lo que permite que la central siga siendo de las más rápidas del país en cuanto a su respuesta para aportar potencia activa al sistema.
El diseño realizado contribuyó a que la central sea más eficiente en su función fundamental, aportando una operación fiable y automatizada, sin la intervención del operador en el seguimiento y corrección de la frecuencia y/o potencia activa. Añadiendo a esto, el ahorro que trae consigo una unidad generadora que consuma solo el agua que necesita para aportar la potencia necesaria y corregir el desbalance de frecuencia al rango que le fue asignada. Esta acción contribuye significativamente al uso racional del agua, recurso natural imprescindible para la vida.
Este proyecto puede ser usado como base para el estudio en trabajos relacionados con la implementación de un control de frecuencia y/o potencia en plantas generadoras.

