










 Custom services
Custom services
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1.- INTRODUCCIÓN
Ciertas intervenciones quirúrgicas implican un riesgo considerable de producir lesiones neurológicas colaterales [1,2]. Si estos daños son permanentes, pueden disminuir de forma considerable la calidad de vida de los pacientes que los sufren. Entre las subespecialidades de la neurofisiología se destaca el monitoreo intraoperatorio (MNIO), cuyo fin es identificar las alteraciones de las funciones nerviosas durante el acto quirúrgico. Ello permite una intervención temprana, encaminada a evitar déficit neurológicos temporales y permanentes [2-5].
Para evaluar el estado estructural y funcional de las vías nerviosas descendentes en zonas con alta concentración de nervios expuestos a riesgos durante una cirugía, una de las técnicas electrofisiológicas empleadas en el monitoreo intraoperatorio es el registro del potencial evocado motor (PEM) [6-9]. Este se registra y procesa con un equipo de MNIO, donde se establecen criterios de alarmas que advierten de la posible ocurrencia de daños.
En las intervenciones quirúrgicas que pueden comprometer las vías nerviosas motoras, los pacientes se encuentran bajo los efectos de la anestesia general, por eso se requiere de un método que evoque los potenciales motores en estas condiciones. En 1980, Merton y Morton desarrollan la técnica de estimulación eléctrica transcraneal para estimular la corteza cerebral motora y evocar el potencial motor. Con esta técnica se logra activar el área motora del cerebro; pero se requieren pulsos eléctricos de alta intensidad debido a que el cráneo y el cuero cabelludo producen una alta impedancia en el área estimulada. Se supone que solamente el 10 % del total de la corriente de estimulación sobrepasa esta barrera y activa efectivamente las neuronas [7].
Actualmente para evocar el potencial motor, se emplean estimuladores eléctricos transcraneales (EET) que generan estímulos eléctricos compuestos por trenes de pulsos. Este estímulo eléctrico se caracteriza por parámetros físicos que inciden directamente sobre el efecto de la estimulación, estos son: la intensidad de la corriente eléctrica (Ip), la amplitud del voltaje (Vp), la duración del pulso (tp), el número de pulsos y el tiempo que transcurre entre pulsos adyacentes (isi) [7], como se muestra en la Figura 1.

Aunque se carece de un consenso internacional sobre los óptimos parámetros físicos de la estimulación eléctrica para obtener el PEM, existen sugerencias sólidas fundamentadas en las experiencias de algunos equipos de monitorización neurofisiológica intraoperatoria [10], que respetan el límite máximo de energía que se puede transferir a un paciente en un pulso (50 mJ). Este parámetro lo establece la Comisión Electrotécnica Internacional [11]. Por otro lado, se han desarrollado investigaciones para determinar los parámetros físicos del estímulo eléctrico y de este modo obtener un PEM seguro para los pacientes [10,12]. Estos estudios avalan un rango de valores de los parámetros físicos del estímulo, como puede observarse en la Tabla 1 [7-12].
Tabla 1 Valores reportados en la bibliografía de los parámetros físicos de los estímulos eléctricos empleados para obtener el PEM.
| Parámetro | Posibles valores |
|---|---|
| Vp | 100 - 1000 V |
| Ip | 0 - 1000 mA |
| N | 1 - 9 |
| isi | 1 - 10 ms |
| tp | 50 - 2000 µs |
Los EET se emplean en combinación con equipos diseñados para el MNIO que permitan registrar el PEM. Su diseño depende de su escenario de aplicación, que por lo general es el salón de operaciones. Debe tenerse en cuenta que durante el acto quirúrgico el paciente se sitúa en una cama a la que sólo acceden los miembros del equipo de cirugía y los anestesistas. Los restantes especialistas que participan deben permanecer alejados del área. Por ello es que previo a la cirugía, se montan sobre el paciente los electrodos de registro y estimulación que se emplearán en los protocolos que previamente diseña el neurofisiólogo, en coordinación con el resto del equipo.
Dichos electrodos deben conectarse a dispositivos que permitan el registro o la estimulación y que se ubiquen en el área quirúrgica, debido a que la longitud de sus cables de conexión siempre es menor que la distancia establecida en torno al paciente. Es por ello que el bloque de amplificadores para el registro, así como el dispositivo al que se conectan los electrodos de estimulación, se colocan generalmente debajo de la cama quirúrgica. En particular, para el EET esto significa que debe existir un bloque que permita la conexión de los electrodos de estimulación colocados sobre el cuero cabelludo. Este a su vez se conecta hacia el estimulador, mediante un cable cuya longitud puede ser de hasta 5 metros.
El equipo para potenciales evocados y electromiografía Neuronica 5, desarrollado por el Centro de Neurociencias de Cuba, ha sido adaptado para ser empleado en MNIO, sin embargo carece de un estimulador eléctrico que permita obtener el PEM. Por tal motivo el objetivo principal del trabajo que aquí se presenta es diseñar un EET, cuyas prestaciones técnicas son similares a las de otros equipos de la competencia, pero se distingue de estos por el empleo de una combinación redundante de electrónica analógica y digital en los mecanismos de verificación de la seguridad.
La sección dos de este trabajo presenta una descripción funcional del equipo, así como las herramientas utilizadas para su diseño y desarrollo. Luego se exponen las pruebas realizadas al equipo y los resultados obtenidos, que posteriormente son discutidos y se comparan con equipos similares de la competencia.
2.- CARACTERÍSTICAS GENERALES DEL DISEÑO
La aplicación electrofisiológica y el escenario de uso de un estimulador, imponen las características de los parámetros físicos del estímulo. Por tal razón, es oportuno desarrollar el producto partiendo de las particularidades de los estímulos eléctricos que se desean lograr. Los parámetros físicos generados por el EET que se presenta en este trabajo, se resumen en la Tabla 2. El equipo consta de seis salidas de estimulación, que pueden funcionar como ánodo o cátodo. En cada momento es posible seleccionar dos de ellas para aplicar el estímulo.
Tabla 2 Parámetros físicos del estímulo eléctrico generado por el EET.
| Parámetro | Valor | Observaciones |
|---|---|---|
| Voltaje de estimulación (V) | 0-999 | Capacidad de entregar 1 A de corriente |
| tp (µs) | 50 | No se brinda la posibilidad de cambiar este parámetro como medida de seguridad |
| isi (ms) | 1-10 | Incremento de 0.1 ms |
| Número de pulsos | 1-9 | El número máximo a seleccionar depende del valor del voltaje de estimulación: 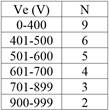
|
| Forma de onda | Rectangular | Bifásica o monofásica |
| Frecuencia de estimulación | 1 Hz |
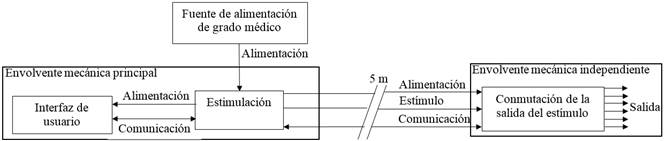
Como muestra la Figura 2, el EET diseñado consta de cuatro bloques que realizan funciones específicas:
Interfaz de usuario: Permite interactuar con el equipo y seleccionar los valores de los parámetros físicos del estímulo a generar, así como seleccionar las dos salidas empleadas para aplicar el mismo, indicando cuál es el ánodo y cuál es el cátodo. Un primer microcontrolador STM32F429 detecta las operaciones que desea realizar el usuario, a la vez que envía la información recopilada al Bloque de Estimulación y brinda información visual sobre la configuración del sistema.
Estimulación: Genera el estímulo eléctrico con las características seleccionadas por el usuario. Un segundo microcontrolador STM32F429 recibe la información que envía el bloque Interfaz de usuario y realiza las acciones correspondientes para crear el estímulo. Un aspecto importante dentro de este bloque es que en él se implementan, además, los mecanismos de verificación del estímulo para lograr un funcionamiento seguro.
Conmutación: Conmuta las salidas por las que se emite el estímulo eléctrico. Este bloque se encuentra en una envolvente mecánica independiente de la principal del equipo, que engloba los bloques de Interfaz de usuario y Estimulación (Figura 2), lo cual responde al modo de uso del equipo. La comunicación entre el bloque de Conmutación de la salida del estímulo y el bloque de Estimulación, que se encuentran en ambas evolventes, se realiza a través de un cable que porta las señales de alimentación, estímulo y comunicación. La longitud máxima de este cable es de 5 m, lo cual está determinado por el modo de uso del equipo.
Fuente de alimentación: Suministra la alimentación al equipo. Se emplea una fuente comercial de grado médico, con salida de voltaje de 12 V de corriente directa.
Por su importancia para el funcionamiento del equipo, así como por la novedad en los mecanismos de seguridad empleados, este artículo enfatiza en el diseño e implementación del Bloque de Estimulación, debido a que en este radica el principal aporte de la investigación en cuanto a los sistemas de generación de los estímulos, la verificación de la seguridad del estímulo aplicado y la actuación ante la ocurrencia de un evento potencialmente peligroso.
2.1.- BLOQUE DE ESTIMULACIÓN
En la Figura 3 se muestra el diagrama en sub-bloques funcionales que integran el Bloque de Estimulación, que está compuesto por siete sub-bloques funcionales, cuyas principales características se describen a continuación.
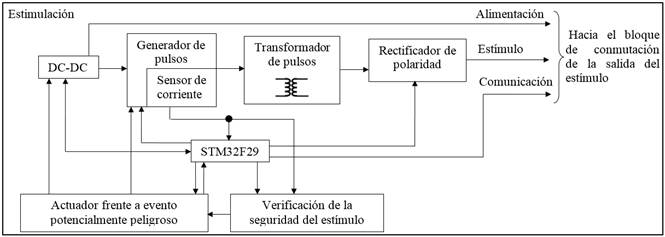
2.1.1.- SUB-BLOQUE DC-DC
El sub-bloque DC-DC es el encargado de generar los voltajes de alimentación del sistema, incluyendo el voltaje de alimentación del sub-bloque generador de pulsos (15 V). Para ello emplea el convertidor aislado NCS6S1215C. Este componente recibe como entrada los 12 V de la fuente de voltaje de grado médico (Figura 2), y entrega en su salida los 15 V que alimentan al sub-bloque Generador de pulsos.
A partir de este voltaje se obtiene la alimentación del sub-bloque Rectificador de polaridad (5 V) y la de los circuitos integrados (3.3 V). Para generar estos voltajes se emplean dos reguladores conmutados por modulación de ancho del pulso (TPS560200DBVT). El sub-bloque DC-DC genera además, la tercera parte de la amplitud del voltaje de estimulación a través de una fuente conmutada de alto voltaje ajustable por el microcontrolador, cuya implementación puede observarse en la Figura 4.
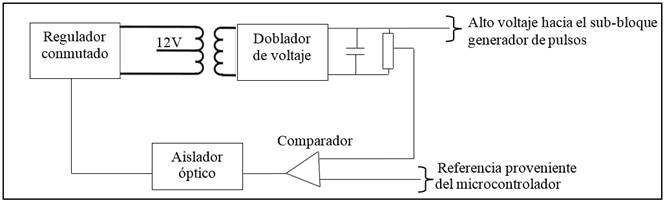
La fuente conmutada de alto voltaje presenta una topología conocida como Push Pull, por su nombre en inglés, que se caracteriza por emplear un transformador con terminal central en su enrollado primario, conectado al voltaje de alimentación de la fuente (Figura 4). Los restantes terminales del enrollado primario conmutan en contrafase.
La topología Push Pull, en comparación con otras fuentes conmutadas, tiene como ventaja ser electrónicamente menos ruidosa, debido a que sus conmutaciones en contrafase cancelan la generación de ruido electromagnético. Otra de sus ventajas es que el voltaje entre los terminales de los extremos del enrollado primario del transformador, duplica el voltaje en el terminal central, aumentando al doble la relación de transformación.
El regulador conmutado que se emplea es el controlador SG3525AP. Este circuito integrado cuenta con dos salidas moduladas por ancho de pulso en contrafase. Estas regulan la conducción de corriente por los terminales del enrollado primario del transformador, que entre cada derivación del enrollado primario y el enrollado secundario, presenta una relación de transformación igual a siete. Este valor se determinó según la ecuación (1), donde N representa la relación de transformación, VOMAX se refiere al voltaje máximo que debe entregar la fuente conmutada (333 V), y Vin el voltaje en el terminal central del enrollado primario del transformador (12 V). Por su parte, el factor 4 de la ecuación (1) se debe a dos razones:
La configuración Push Pull impone que el voltaje entre los terminales de los extremos del enrollado primario del transformador duplique el voltaje en su terminal central.
En la salida del transformador se requiere obtener solamente la mitad del voltaje que debe entregar la fuente conmutada. Como se verá posteriormente, un circuito doblador de voltaje en la salida del transformador se emplea para duplicar el que entrega la fuente conmutada.
En la salida del transformador se localiza un circuito doblador de voltaje que carga una pareja de capacitores en serie. El valor de la capacidad mínima de estos se determinó a partir de la ecuación (2). Esta describe el proceso de descarga del capacitor, donde VOMAX representa el voltaje máximo que debe entregar la fuente conmutada (333 V), y constituye además el voltaje máximo de carga del arreglo en serie de ambos capacitores; t simboliza el tiempo de descarga de la red capacitiva y es el tiempo que dura un pulso de estimulación (50 µs); Rt se refiere a la impedancia del enrollado primario del transformador (100 Ω a 20 kHz, dato suministrado por el fabricante del transformador en las hojas técnicas), en tanto VCf es el voltaje en el arreglo de capacitores al transcurrir el tiempo t luego de haberse iniciado la descarga. La variable VCf se escoge de modo que al transcurrir t, el voltaje en la red capacitiva se encuentre al 99 % de VOMAX. La variable Cf representa la capacidad mínima que debe haber en la red formada por los dos capacitores en serie. Al despejar esta variable en la ecuación 2 y sustituir los valores de las restantes, se determina que la capacidad mínima del arreglo debe ser de 50 µF. Al asumir que ambos capacitores son iguales y se encuentran en serie, la capacidad individual de cada uno debe ser como mínimo la mitad de Cf (25 µF).
La carga eléctrica acumulada en ellos brinda el voltaje de la fuente conmutada. Luego de los capacitores, se encuentra un divisor de voltaje empleado para tomar una muestra del voltaje de la fuente y compararlo con una referencia proveniente de un convertidor digital analógico del microcontrolador.
El error resultante de la comparación modula el ancho de los pulsos en la salida del SG3525AP y, como consecuencia, se ajusta el voltaje de la fuente, de modo que la muestra en el divisor tiende a igualarse a la referencia del microcontrolador. El divisor se calcula de manera que cuando la muestra es igual al voltaje máximo de referencia que puede entregar el microcontrolador, el voltaje de la fuente se encuentre en 333 V (la tercera parte de la máxima amplitud del voltaje de estimulación). Al variar el voltaje de referencia, el microcontrolador es capaz de configurar la fuente conmutada de alto voltaje a la tercera parte de la amplitud del voltaje de estimulación.
Ante la detección de un evento potencialmente peligroso, el microcontrolador y el sub-bloque Actuador pueden de manera independiente inhibir las señales de salida del regulador conmutado (SG3525AP) y descargar los capacitores de la fuente a través de un transistor de descarga.
El transformador de la fuente conmutada, de conjunto con el aislador óptico (4N25) y el convertidor aislado NCS6S1215C, conforman una barrera de aislamiento eléctrico entre el paciente y la red eléctrica.
2.1.2.- SUB-BLOQUE GENERADOR DE PULSOS
El sub-bloque Generador de pulsos tiene la función de entregar a su salida pulsos de alto voltaje (1000 V máximo), que se conforman con el voltaje que entrega la fuente conmutada y con la información relativa a la cantidad de pulsos, polaridad, duración y el momento en que se deben generar. Esta información es brindada por el microcontrolador y transmitida al sub-bloque Generador de pulsos, por medio de una interfaz de control de bajo voltaje.
El principal componente electrónico de este sub-bloque es el controlador de motor de tres fases y de alto voltaje (600 V) FSB50760SF que consta de tres canales. De ellos, sólo dos se utilizan en el presente diseño. Cada canal del FSB50760SF presenta una interfaz de control de bajo voltaje (3.3-5 V) compuesta por dos terminales de entrada digital compatible con microcontroladores. Dichas interfaces se emplean para comunicar el microcontrolador con el controlador de motor. A través de estas se envían los comandos de generación de los pulsos.
Ante la detección de un evento potencialmente peligroso, el microcontrolador no solicita al FSB50760SF la generación de pulsos; mientras, el sub-bloque Actuador bloquea la interfaz de control existente entre el microcontrolador y el controlador de motor. Esta interrupción se logra debido a que el sub-bloque Actuador tiene acceso a los terminales de habilitación de un arreglo de circuitos integrados transceptores, presentes en medio de la interfaz. La Figura 5 muestra un diagrama de los sub-bloques Generador y Transformador de pulsos.
2.1.3.- SUB-BLOQUE TRANSFORMADOR DE PULSOS
Los pulsos generados por el sub-bloque Generador de pulsos, pasan al Transformador de pulsos. Como su nombre lo indica, este sub-bloque está constituido por un transformador de pulsos con una razón de transformación igual a tres y que es capaz de entregar en su salida pulsos de 50 µs de duración, con amplitud de voltaje de hasta 1000 V y con intensidad de corriente de 1 A. Este transformador constituye la segunda etapa para elevar el voltaje hasta la amplitud configurada por el usuario. La Figura 5 muestra la conexión entre el controlador de motor y el transformador de pulsos.
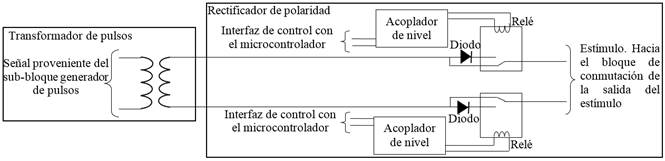
2.1.4.- SUB-BLOQUE RECTIFICADOR DE POLARIDAD
Este sub-bloque permite configurar la polaridad de la forma de onda del estímulo aplicado entre bifásica o monofásica. Dicha configuración se realiza rectificando los pulsos en el enrollado secundario del transformador de pulsos con diodos de alto voltaje (2 kV). La configuración de pulsos monofásicos se realiza a través de un diodo conectado a uno de los terminales del enrollado secundario del transformador. Si no se conecta ningún diodo al enrollado secundario del transformador, los pulsos quedan configurados con polaridad bifásica; si se conecta un diodo a cada terminal del enrollado secundario del transformador, queda inhibida la salida de los estímulos. Esta condición la implementa el microcontrolador al detectar un evento potencialmente peligroso.
El microcontrolador realiza la conexión o desconexión de los diodos rectificadores a través de relés. Los empleados en el presente diseño (FX2-D3243) son del tipo doble polo simple tiro y tienen dos estados estables. Para cambiar de estado, al relé se le debe entregar en su bobina de control un pulso con amplitud de 5 V y duración de 5 ms (datos suministrados por la hoja técnica del relé FX2-D3243). La selección del estado depende del sentido de circulación de la corriente del pulso de control por la bobina del mismo. Debido a que el microcontrolador entrega como máximo 3.3 V en sus terminales de salida, entre estos y los terminales de la bobina del relé se colocan acopladores de nivel para compensar la diferencia de voltaje y drenar la corriente. La figura 6 ilustra el diagrama descrito anteriormente.

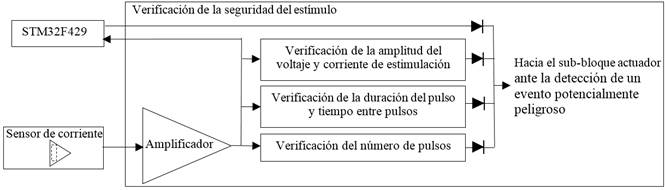
2.1.5.- SUB-BLOQUE VERIFICACIÓN DE LA SEGURIDAD DEL ESTÍMULO
Un aspecto característico del EET presentado en este trabajo y que lo diferencia de otros es el diseño de los mecanismos de chequeo de la seguridad del paciente y del operador, que se realiza a través de una combinación redundante de electrónica analógica y programación del microcontrolador. Con este objetivo se diseñó el sub-bloque Verificación de la seguridad del estímulo, que está integrado por los circuitos analógicos que complementan el sistema de verificación de la seguridad. La contraparte digital de esta vigilancia es realizada por el microcontrolador STM32F429.
El sistema de verificación de la seguridad del estímulo aplicado al paciente, parte de la corriente que circula por el enrollado primario del transformador de pulsos. Como sensor de esta corriente se emplea una resistencia en serie con el enrollado primario del transformador de pulsos y con las salidas del controlador de motor. Para garantizar el correcto funcionamiento de este último componente, el voltaje máximo en la resistencia que actúa como sensor no debe exceder el valor de 1 V. Teniendo en cuenta que la mayor intensidad de estimulación entregada por el enrollado secundario del transformador de pulsos es de 1 A y que presenta una razón de transformación igual a tres, estas condiciones imponen un valor máximo de corriente en el enrollado primario del transformador de pulsos de 3 A. Por tal razón se emplea una resistencia de 0.3 Ω como sensor de corriente, de manera que el voltaje máximo en dicha resistencia es de 0.9 V.
Dada la importancia de este componente se determina que el mismo debe presentar un error relativo máximo de 1 %, cinco veces menor que el criterio de evaluación empleado en el presente trabajo y que más adelante se expone. Además, se determinó la potencia mínima que debe ser capaz de disipar dicha resistencia, representada por PSMIN según la ecuación 3, donde también ISMAX simboliza la corriente máxima que circula por la resistencia (3 A), Rs se refiere a su valor (0.3 Ω), t es el tiempo que dura un pulso de estimulación (50 µs) y isiMIN es el tiempo mínimo que transcurre entre pulsos (1 ms). La relación entre t y (t + isiMIN) en la ecuación 3 alude al ciclo útil de la señal que circula por el sensor.
Al sustituir las variables en la ecuación 3, se obtiene que PSMIN es de 128 mW. En la Figura 5, se muestra la conexión del sensor de corriente al generador y transformador de pulsos. Esta configuración permite que la corriente siempre circule por el sensor en el mismo sentido, independientemente de la polaridad del pulso, por lo que el voltaje que entrega el sensor es positivo y monofásico. De esta manera se simplifica el circuito de acondicionamiento, que está formado por un amplificador en configuración no inversor de ganancia tres, lo que garantiza que para el valor máximo de corriente que circula por el enrollado primario del transformador de pulsos, se obtiene en la salida del amplificador el voltaje de plena escala del convertidor analógico digital del microcontrolador según la ecuación 4.
En esta, VOAMP representa el voltaje en la salida del amplificador, G es la ganancia del amplificador (3), ISMAX simboliza la corriente máxima que circula por la resistencia (3 A) y Rs hace referencia al valor de la resistencia (0.3 Ω). Al sustituir las variables en la ecuación 4 se obtiene que para la máxima corriente que circula por la resistencia, en la salida del amplificador se genera un voltaje de 2.7 V, aproximadamente el voltaje de plena escala del convertidor analógico digital del microcontrolador (3V).
La señal resultante del amplificador es conducida a tres sub-bloques y cada uno de estos vela porque los parámetros físicos del estímulo que se genera sean seguros y en correspondencia con los valores configurados por el usuario. Las salidas de estos sub-bloques se conectan al ánodo de un diodo, en tanto los cátodos, a un nodo común. De este modo se obtiene una funcionalidad OR (Figura 7), la cual permite la generación de una transición positiva de nivel de voltaje en el nodo cuando se detecta al menos un fallo. Dicho nodo actúa como salida del sub-bloque de Verificación de la seguridad del estímulo (Figura 7) y entrada del sub-bloque Actuador ante la detección de un evento potencialmente peligroso.
Aunque el STM32F429 no forma parte del presente sub-bloque, también verifica la seguridad del estímulo. Para realizar esta función, adquiere la señal resultante de amplificar la señal del sensor y accede a la salida del presente sub-bloque para activarlo en caso de detectar un evento potencialmente peligroso.
En el sub-bloque Verificación de la amplitud del voltaje y corriente de estimulación se verifica la amplitud de la señal del sensor, pues tanto la amplitud del voltaje de estimulación como su intensidad de corriente impactan directamente sobre la amplitud de la señal del sensor. Este sub-bloque se compone de un comparador que verifica si la señal resultante de la etapa de amplificación posterior al sensor excede el valor de una referencia de voltaje. Esta proviene de la salida de un convertidor digital analógico (LTC2630) controlado por el microcontrolador mediante una interfaz de comunicación serie sincrónica. El microcontrolador varía la referencia en función de la amplitud del voltaje de estimulación que el usuario configura. El valor de la referencia se obtuvo experimentalmente, midiendo con un osciloscopio el voltaje presente en la salida del amplificador, al estimular con un pulso en el intervalo de 0 - 1000 V con incrementos de 20 V, sobre una impedancia de 1 kΩ.
El sub-bloque Verificación de la duración del pulso y tiempo entre pulsos (Figura 8A) es el encargado de verificar los tiempos de duración y repetición de los pulsos de estimulación. Debido a la naturaleza de estos parámetros, se impone partir de pulsos que reflejen tales variables pero con la amplitud de valor fijo, de modo que la amplitud de los pulsos no introduzca errores en este sub-bloque. Para lograr esta condición, en su entrada hay un circuito que compara la señal resultante del amplificador con una referencia de valor constante. El valor de la referencia se determinó experimentalmente, de manera que al estimular sobre una impedancia de carga de 1 kΩ con pulsos de amplitud mínima de 10 V, en la salida del comparador se genere la réplica del estímulo. Esta señal dispara un circuito monoestable (monoestable 1 en la Figura 8A) que provoca un pulso de duración de 930 µs después de finalizado el de estimulación (Figura 8).
El monoestable 1 de la Figura 8 está conformado por un diodo, una red RC y un comparador. El capacitor se carga rápidamente a través del diodo, en tanto se descarga lentamente a través de la resistencia. Los valores de los componentes de la red RC se determinaron a partir de la ecuación 2, donde VOMAX representa el voltaje del capacitor en el momento en que comienza a descargarse (5 V) y VC simboliza el voltaje en el capacitor durante la descarga. Resulta oportuno aclarar que esta variable se escoge de modo que el voltaje en el capacitor alcance un valor de 2.5 V luego de que hayan transcurrido 930 µs de descarga. Por su parte, t es el tiempo (930 µs), y las variables R y C son los valores de la resistencia y el capacitor de la red, respectivamente. Al asumir un valor de R = 1 kΩ, despejar la variable C y sustituir las restantes variables en la ecuación 2, se determina el valor del capacitor.
El comparador del monoestable 1 emite un pulso que se mantiene presente mientras el voltaje en el capacitor es mayor que el de una referencia de 2.5 V. Este valor garantiza que el pulso dure 930 µs después de que haya terminado el pulso de estimulación. La salida del monoestable 1 va a la entrada del monoestable 2 de la Figura 8A. El monoestable 2 genera un pulso con un retardo de 54 µs respecto al pulso de estimulación y finaliza 930 µs después de finalizado el pulso de estimulación. En la Figura 8A se observa que este monoestable 2 también está compuesto por un diodo, una red RC y un comparador; pero a diferencia del monoestable 1, el capacitor se carga lentamente a través de la resistencia, en tanto se descarga rápidamente a través del diodo. El valor de la red RC se determinó a partir de la ecuación 5 que describe la carga del capacitor, VC es el voltaje en el capacitor durante la carga, variable que se escoge de modo que el voltaje en el capacitor alcance un valor de 2.5 V luego de que hayan transcurrido 54 µs después de comenzar la carga, VCMAX simboliza el voltaje máximo al que se carga el capacitor (5V), t se refiere al tiempo (54 µs), y las variables R y C constituyen los valores de la resistencia y el capacitor de la red, respectivamente. Al asumir un valor de R = 1 kΩ, despejar la variable C y sustituir las restantes variables en la ecuación 5, se determina el valor del capacitor.
El comparador del monoestable 2 emite un pulso que se mantiene presente mientras el voltaje en el capacitor es mayor que el de una referencia de 2.5 V. Este valor garantiza que el pulso presente un retardo 54 µs después de haber iniciado el pulso de estimulación.
En caso que tanto el comparador como los dos circuitos monoestables tengan simultáneamente sus salidas en nivel alto, indica la ocurrencia de un pulso de duración mayor a 54 µs o, al menos, dos pulsos con tiempo de repetición menor a 930 µs. Ambas condiciones, ilustradas en la Figura 8B, constituyen eventos potencialmente peligrosos y activan el sistema de protección. Para detectar dicha condición se emplea una compuerta lógica tipo AND, como muestra la Figura 8A.
El diagrama electrónico del sub-bloque de Verificación del número de pulsos es similar al de Verificación de la duración del pulso y tiempo entre pulsos. Está compuesto por un comparador de entrada igual al comparador del sub-bloque de Verificación de la duración del pulso y tiempo entre pulsos, mostrado en la Figura 8. Luego se encuentra un circuito monoestable con la misma configuración del monoestable 1 de la Figura 8. Los valores de la red RC se determinaron de acuerdo con la ecuación 2, se asumió el voltaje inicial del capacitor VOMAX igual a 5 V, un voltaje en el capacitor (VCf) de 2.5 V luego de que hubiesen transcurrido 5 ms de comenzar la descarga. Esta condición se debe a que 5 ms es el tiempo entre pulsos medio. Se asumió además un valor de Rt igual a 1 kΩ. La referencia del comparador del circuito monoestable en este sub-bloque es la salida de un convertidor digital analógico (LTC2630), que controla el microcontrolador mediante una interfaz de comunicación serie sincrónica. El microcontrolador varía la referencia en función de la cantidad de pulsos y del tiempo entre estos, que el usuario configura, debido a que tales parámetros inciden directamente en la carga del capacitor del circuito monoestable. El valor de la referencia se obtuvo experimentalmente midiendo con un osciloscopio el voltaje presente en el capacitor del monoestable para todas las combinaciones posibles de número de pulsos y del tiempo entre ellos. La salida del comparador del circuito monoestable constituye la salida del sub-bloque.

2.1.6.- SUB-BLOQUE ACTUADOR FRENTE A LA DETECCIÓN DE UN EVENTO POTENCIALMENTE PELIGROSO
Al detectarse un evento potencialmente peligroso en el sub-bloque Verificación de la seguridad del estímulo, se genera un pulso que se transmite hasta el sub-bloque Actuador ante la detección de un evento potencialmente peligroso. El frente de subida del pulso conmuta el estado de la salida de un almacenador tipo D, lo que desencadena la ejecución de las siguientes acciones:
Se activa el terminal de apagado del regulador conmutado SG3525 de la fuente conmutada.
Se pone en saturación el transistor de descarga de los capacitores de la fuente conmutada.
Se interrumpe la interfaz de comunicación entre el microcontrolador STM32F429 y el controlador de motor FSB50760SF.
Se genera una interrupción al microcontrolador para que este realice las acciones que le competen.
2.1.7.- SUB-BLOQUE STM32F429
Este sub-bloque está compuesto por un microcontrolador STM32F429 que administra todos los recursos presentes en el Bloque de Estimulación, a través de la ejecución de las siguientes tareas:
Comunicación con el bloque Interfaz de usuario. Permite recibir la información sobre las acciones que desea realizar el usuario en el sistema. Para desarrollar esta funcionalidad se emplea un puerto serie asincrónico asociado con un canal de acceso directo a memoria, el cual se decide usar para simplificar la programación de los procesos de recepción y transmisión de los bytes que componen los mensajes intercambiados con el bloque de Interfaz de usuario. El STM32F429 responde con un mensaje de confirmación por cada mensaje recibido desde el bloque de Interfaz de usuario.
Comunicación con el bloque Conmutación de la salida del estímulo. Se diseñó para transmitir al bloque donde se encuentra el conmutador, la información referente a las salidas seleccionadas por el usuario para aplicar el estímulo. En la implementación se utilizó una segunda combinación de un puerto serie asincrónico asociado a un canal de acceso directo a memoria. Este último se emplea por la simplicidad que brinda a los procesos de recepción y transmisión de los bytes que componen los mensajes intercambiados con el bloque de Conmutación de la salida del estímulo.
Configuración de la fuente conmutada. Requiere el empleo de un convertidor digital analógico interno del microcontrolador. El valor asignado a dicho convertidor actúa como una referencia que modula las salidas del regulador conmutado SG3525 y, en consecuencia, se ajusta el voltaje de la fuente conmutada. Inicialmente el microcontrolador fija la fuente conmutada a 0 V y la reconfigura cada vez que recibe un mensaje de configuración de la amplitud del voltaje de estimulación.
Estimulación. El microcontrolador establece el momento en que se debe generar un pulso de estimulación y la duración del mismo. La sincronización de estos tiempos se realiza con un temporizador interno del STM32F429. En esta funcionalidad se emplean, además, cuatro terminales de entrada-salida configurados como salidas digitales, que constituyen la interfaz con el controlador de motor. Esta tarea se desencadena cada vez que se recibe un mensaje de estimulación.
Configuración del sub-bloque Rectificador de polaridad. Se emplean cuatro terminales de entrada-salida configurados como salidas digitales, a través de los cuales el microcontrolador configura los relés del rectificador de polaridad. En esta tarea se emplea, además, un temporizador a partir del cual se obtiene el tiempo que debe durar el pulso que reciben las bobinas de los relés para que conmuten. Esta acción se ejecuta cada vez que se recibe un mensaje de configuración de la polaridad.
Configuración de las referencias del sub-bloque Verificación de la seguridad del estímulo. Las referencias del sistema de verificación de la seguridad del estímulo son salidas analógicas de convertidores digitales analógicos externos al microcontrolador. Los convertidores empleados (LTC2630) presentan una interfaz de control serie sincrónica. Por tal razón, se emplea una interfaz de este tipo del microcontrolador y dos terminales de entrada-salida configurados como salidas digitales, a través de los cuales se habilita el convertidor que se desea configurar (un convertidor se usa en el sub-bloque Verificación del número de pulsos y el otro se emplea en el sub-bloque Verificación de la amplitud del voltaje y de la corriente de estimulación). Esta tarea se ejecuta al recibir un mensaje de configuración del número de pulsos, del tiempo entre pulsos o de la amplitud del voltaje de estimulación. En función del mensaje recibido se selecciona el convertidor a configurar, con valores que se determinaron experimentalmente.
Inicialización del sub-bloque Actuador ante un evento potencialmente peligroso. Se ejecuta al iniciar el sistema para dejar listos los circuitos que deshabilitan la generación de estímulos en caso de que se detecte un evento potencialmente peligroso. Esta acción consiste en configurar el estado de un almacenador tipo D y en cortar la conducción del transistor de descarga de la fuente conmutada. Para esto, se emplean tres terminales de entrada-salida digital del microcontrolador, configurados como salidas: el primero de estos terminales controla la entrada de disparo del almacenador tipo D, el segundo controla la entrada de datos del almacenador y el tercero va a un comparador que actúa como controlador del transistor de descarga de la fuente conmutada.
Verificación de la seguridad del estímulo. Se realiza paralelamente al sub-bloque de Verificación de la seguridad del estímulo, existiendo una combinación redundante entre circuitos analógicos y esta tarea ejecutada por el microcontrolador. Para desarrollarla se emplean dos convertidores analógicos digitales internos del STM32F429 y un temporizador. Mediante este último se obtiene el período de adquisición de muestras del voltaje presente en la fuente conmutada y de la salida del amplificador de la señal del sensor. Esta tarea se ejecuta en todo momento con un periodo de repetición de 10 µs, de manera que el microcontrolador tiene conocimiento de la cantidad de pulsos, la duración, la amplitud del voltaje de estimulación, la intensidad de corriente de estimulación, y del tiempo entre pulsos. Si el microcontrolador detecta una alteración en alguno de los parámetros físicos descritos, o se activa el proceso de interrupción que desencadena el sub-bloque Verificación de la seguridad del estímulo, automáticamente la generación de los estímulos se detiene, se conectan los diodos del bloque rectificador de polaridad y se activa el sub-bloque Actuador ante un evento potencialmente peligroso, a través del terminal de salida digital que actúa sobre el disparo del almacenador tipo D.
2.2.- HERRAMIENTAS UTILIZADAS
A partir del diagrama funcional de los diferentes bloques que componen el equipo, y considerando su contexto de uso, se decidió que el mismo estuviera formado por dos volúmenes: el Estimulador y el Conmutador. El primero concentra la generalidad de los bloques funcionales, con excepción del bloque Conmutación de la salida del estímulo, que físicamente se encuentra en el segundo volumen. A su vez, cada uno de ellos contiene las siguientes placas de circuito impreso:
Estimulador: Placa de la interfaz de usuario y placa de la generación del estímulo.
Conmutador: Placa de conmutación
Todos los esquemas electrónicos, así como el circuito impreso de las diferentes placas se implementaron en la herramienta Altium Designer en su versión 15.0.14. Las placas diseñadas tienen cuatro capas con dieléctrico del tipo FR4. En el diseño de su circuito impreso se tuvieron en cuenta los siguientes elementos: dimensiones de las envolventes plásticas seleccionadas para cada volumen, cumplimiento de las normativas de seguridad eléctrica y compatibilidad electromagnética para este tipo de equipo, entre otros aspectos.
El equipo clasifica como un equipo médico clase II tipo BF según [13]. Para dar cumplimiento a los requerimientos de seguridad eléctrica que deben cumplir esta categoría de equipos médicos, se implementaron las siguientes reglas en el diseño de la placa de circuito impreso:
Se empleó una separación mínima de 0.15 mm entre conductores, con diferencia de potencial menor o igual a 15V.
Para los conductores del voltaje de la fuente conmutada (333 V máximo) se empleó una separación mínima respecto a otros conductores de 2.5 mm.
Para los conductores del enrollado secundario del transformador de pulsos, que pueden portar una diferencia de potencial de hasta 1000 V, se empleó una separación mínima respecto a otros conductores de 5 mm.
Se adicionó una ranura aérea con 5 mm de separación que constituye una barrera de aislamiento entre la entrada de alimentación del EET y las partes aplicables del mismo. Sobre esta ranura se ubicaron los componentes aislados (regulador aislado de 12 a 15 V, aislador óptico y trasformador de la fuente conmutada en la Figura 4).
Adicionalmente, la fuente comercial de 12 V empleada para alimentar todo el equipo, es de grado médico clase II, presentando una doble barrera de aislamiento.
Los datos relativos a las separaciones mínimas entre conductores y la separación de la ranura de la barrera de aislamiento se obtuvieron de las normas [13,14].
Por otra parte, para desarrollar el firmware que ejecuta el microcontrolador STM32F429, se empleó el IDE Microvision 5 de Keil y el generador de inicialización de código STM32CubeMX [15,16].
3.- PRUEBAS TÉCNICAS REALIZADAS
El desarrollo de este equipo ha transitado por las diferentes fases del proceso de diseño-desarrollo que establece el Centro de Neurociencias de Cuba. Tanto la maqueta como el prototipo se han sometido a un conjunto de pruebas internas que se describen en este acápite. No obstante, el equipo deberá someterse a pruebas en laboratorios especializados que permitirán verificar el cumplimiento de los aspectos relacionados con la seguridad eléctrica y la compatibilidad electromagnética requeridos en este tipo de equipo.
Entre las pruebas de seguridad eléctrica se encuentran las definidas en [13]: aislamiento del dieléctrico, alta resistencia, corriente de fuga a tierra, corriente de contacto, corriente de fuga del paciente, corriente auxiliar del paciente y corriente de fuga en línea eléctrica en la pieza aplicada. Entre las pruebas de compatibilidad electromagnética se encuentran las definidas en [13]: emisiones radiadas, emisiones conducidas, emisiones de armónicos, inmunidad, parpadeo y fluctuaciones.
En varias de las pruebas ejecutadas se realizaron mediciones de diferentes parámetros para cada múltiplo de 100 V de la amplitud del voltaje de estimulación en el intervalo de 100 a 1000 V. Estos valores reciben el nombre de valores de ensayo. A continuación, se exponen los resultados alcanzados en la verificación del diseño.
3.1.- FUENTE CONMUTADA
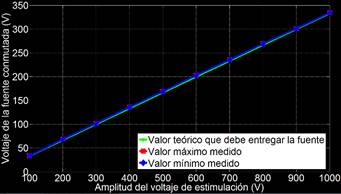
El primer sub-bloque evaluado fue la fuente conmutada. El voltaje que esta debe entregar se midió para cada múltiplo de 100 V de la amplitud del voltaje de estimulación. Dichas mediciones se realizaron de forma no automática, un minuto después de haber configurado la fuente conmutada. Se empleó una herramienta de medición multipropósito Fluke 189. Esta herramienta tiene una resolución de 10 mV y un error de 0.025 %. Para cada valor de ensayo se realizaron diez mediciones.
El gráfico de la Figura 9 muestra el valor teórico que debe entregar la fuente conmutada, que se corresponde con la tercera parte de la amplitud del voltaje de estimulación. En este gráfico se muestran, además, los valores máximos y mínimos medidos. Todos las mediciones tuvieron un error absoluto por debajo de 2.74 V, el mayor alcanzado para el valor de ensayo de 600 V.
3.2.- GENERACIÓN DE ESTÍMULOS
Para comprobar que los estímulos generados coinciden con los parámetros seleccionados en cada momento, se fabricó una punta de pruebas compuesta por un arreglo de diez resistencias de 100 Ω en serie, obteniéndose una resistencia de carga total de 1 kΩ. Se decidió utilizar este valor de impedancia de carga con el objetivo de obtener la máxima corriente de estimulación (1 A) con el máximo voltaje de estimulación (1000 V). Además, este valor de impedancia de carga se encuentra dentro de los valores empleados en las pruebas técnicas realizadas en [17]. Con el objetivo de disminuir tanto como sea posible el error en las mediciones debido al error de las diez resistencias en serie, se determinó que las mismas deben presentar una tolerancia de 1 % y presentar una capacidad mínima de disipación de 1 W, suficiente para soportar la máxima corriente (1 A) que circula por el arreglo en el tiempo de estimulación (50 µs).
3.2.1.- AMPLITUD Y DURACIÓN DE LOS PULSOS
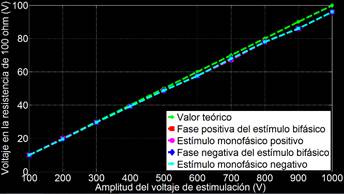
Para comprobar la amplitud del voltaje de estimulación y la duración del pulso se realizaron diez mediciones para cada valor de ensayo en cada una de las formas de onda que se pueden generar: bifásica, monofásica positiva y monofásica negativa. En todos los casos se estimuló con un pulso y se realizaron mediciones con un osciloscopio Tektronix TDS 2024B, que puede medir diferencias de voltaje de hasta 400 V. Dado que la amplitud de los estímulos que se desean medir es de hasta 1000 V, las mediciones se realizaron sobre una de las diez resistencias de 100 Ω, razón por la cual la amplitud medida en estas pruebas es la décima parte de la del estímulo. El osciloscopio se configuró con una escala de 10 V por división en el eje de la amplitud de la señal y 10 µs por división en el eje del tiempo. Con esta configuración se obtienen resoluciones de 2 V y 2 µs, respectivamente. Las mediciones se realizaron de forma no automática, programándose al osciloscopio de modo que capturase el estímulo. Se realizó el ajuste manual de los cursores de medición en la señal mostrada en pantalla. En la Figura 10 se grafica el valor teórico esperado y el valor obtenido en las mediciones realizadas. Los valores medidos fueron iguales para cada valor de ensayo.
La Figura 11 muestra el estímulo observado con el osciloscopio en una de las resistencias de 100 Ω, para una amplitud del voltaje de estimulación de 1000 V y N = 1. En todos los casos, la duración de la fase positiva fue de 25.2 µs y la duración de la fase negativa fue de 25.6 µs en estímulos bifásicos. En el caso de los monofásicos, la duración de los pulsos fue de 50 µs. Todas las mediciones de duración de los pulsos fueron consistentes, obteniéndose siempre el mismo resultado.
3.2.2.- TIEMPO ENTRE PULSOS, NÚMERO DE PULSOS Y POLARIDAD DE LOS PULSOS
Para cada valor de ensayo (Ve) se realizaron estimulaciones con la cantidad de pulsos mostrados en la Tabla 3 y variando el tiempo entre pulsos desde 1 ms hasta 10 ms con incremento de 1 ms, de manera que para cada configuración de Ve - N - isi se realizaron diez mediciones. Todas estas mediciones se realizaron para estímulos bifásicos, monofásicos positivos y monofásicos negativos. No se observaron errores en el tiempo entre pulsos. Tanto el número de pulsos como la forma de onda estuvieron en correspondencia con la configurada.

Figura 11 Estímulo con Vp = 1000 V y N = 1 observado con el osciloscopio en una de las resistencias de 100 Ω. A Bifásico. B Monofásico positivo. C Monofásico negativo.
Tabla 3 Parámetros físicos del estímulo eléctrico utilizados en los ensayos.
| Ve (V) | N | isi (ms) |
|---|---|---|
| 100 | 9 | Desde 1 ms hasta 10 ms, con incremento de 1 ms |
| 200 | 9 | Desde 1 ms hasta 10 ms, con incremento de 1 ms |
| 300 | 9 | Desde 1 ms hasta 10 ms, con incremento de 1 ms |
| 400 | 9 | Desde 1 ms hasta 10 ms, con incremento de 1 ms |
| 500 | 6 | Desde 1 ms hasta 10 ms, con incremento de 1 ms |
| 600 | 5 | Desde 1 ms hasta 10 ms, con incremento de 1 ms |
| 700 | 4 | Desde 1 ms hasta 10 ms, con incremento de 1 ms |
| 800 | 3 | Desde 1 ms hasta 10 ms, con incremento de 1 ms |
| 900 | 2 | Desde 1 ms hasta 10 ms, con incremento de 1 ms |
| 1000 | 2 | Desde 1 ms hasta 10 ms, con incremento de 1 ms |
3.3.- SISTEMA DE PROTECCIÓN
Para comprobar el desempeño del sistema de protección se diseñaron diferentes pruebas. Una de ellas consistió en programar el microcontrolador para que se incremente en uno el número de pulsos luego de realizar una estimulación, simulando una condición anormal de operación en la cual se generan estímulos con números de pulsos mayores a los previstos en el funcionamiento normal del EET.
Con esta funcionalidad se realizaron estimulaciones consecutivas sobre el arreglo de diez resistencias en serie de 100 Ω para cada valor de ensayo, con isi de 1 ms y 10 ms, hasta encontrar el número de pulsos para el que se activa el circuito de protección. En todos los casos, se encontró que la activación ocurre luego de generarse un pulso más que el número de pulsos permitidos, según la Tabla 1.
La segunda prueba realizada al sistema de protección consistió en probar su activación frente al aumento de la duración de los pulsos (tp). El microcontrolador se programó de manera que se incremente en 5 µs el ancho de los pulsos luego de realizar una estimulación, partiendo del ancho del pulso previsto en la operación normal del EET, simulando una condición anormal de operación en la que se generan estímulos con anchos de pulsos mayores a los previstos en el funcionamiento normal del EET. Con esta funcionalidad se realizaron estimulaciones consecutivas sobre el arreglo de diez resistencias en serie de 100 Ω para cada valor de ensayo, hasta encontrar el ancho del pulso para el cual se activa la protección. Esta prueba se realizó con estímulos compuestos por un pulso. En todos los casos se obtuvo que el circuito de protección se activó a partir de un ancho de pulso de 55 µs.
Para comprobar el sistema de protección frente a una disminución no deseada del tiempo entre pulsos (isi), se programó el microcontrolador de manera que disminuyese en 10 µs el tiempo entre pulsos luego de realizar una estimulación, siempre partiendo del mínimo tiempo entre pulsos previsto en la operación normal del EET (1 ms). De esta manera se puede simular una condición anormal de operación donde se generan estímulos con tiempos entre pulsos menores a los previstos en el funcionamiento normal del EET. Con esta funcionalidad se realizaron estimulaciones consecutivas sobre el arreglo de diez resistencias en serie de 100 Ω para cada valor de ensayo, hasta encontrar el tiempo entre pulsos para el cual se activa la protección. Esta prueba se realizó con estímulos compuestos por dos pulsos. En todos los casos, se obtuvo que el circuito de protección se activó a partir de un tiempo máximo de 930 µs.
4.- ANÁLISIS DE LOS RESULTADOS DE LAS PRUEBAS TÉCNICAS
4.1.- CRITERIO DE EVALUACIÓN
Para considerar los resultados como satisfactorios en las mediciones realizadas se tomó como criterio de medida un error relativo máximo de un 5 %, respecto al valor teórico esperado. Este criterio se encuentra muy por debajo del porcentaje de error (30 %) definido como tolerable en [18]. En este aspecto es importante señalar los resultados expuestos en [17], donde se somete al estimulador D185 a pruebas técnicas y se obtienen errores del 35 % en la amplitud del voltaje de estimulación y errores del 66 % en la duración de los pulsos, al estimular sobre una impedancia de carga de 1 kΩ.
4.2.- DISCUSIÓN DE LOS RESULTADOS
En las pruebas técnicas realizadas para verificar el desempeño de la fuente conmutada se obtuvo que los valores medidos del nivel de voltaje estuvieron por debajo de los valores teóricos que debe entregar este bloque funcional. Con respecto a estos últimos se obtuvo un error absoluto máximo de 2.74 V, para el valor de ensayo de 600 V, representando un error relativo de un 1.37 % (debe tenerse presente que la fuente conmutada genera la tercera parte de la amplitud del voltaje de estimulación y sobre la base a estos valores se calcula el error). El mayor error relativo fue de 2.39 % y se obtuvo para el valor de ensayo de 200 V. En ambos casos la prueba fue satisfactoria, al estar el error relativo por debajo del 5 %.
En la Figura 10 se observa que, en las mediciones realizadas al estímulo eléctrico, la amplitud del voltaje de estimulación medida es inferior o igual al voltaje teórico esperado, que es la décima parte de la amplitud de voltaje de estimulación configurado debido a que el estímulo se aplicó sobre un arreglo en serie de diez resistencias de 100 Ω y las mediciones se realizaron sobre una de estas resistencias.
En la misma figura se puede observar que al aumentar la amplitud del voltaje de estimulación se incrementa la diferencia entre el voltaje medido y el esperado. Dicha diferencia puede llegar a ser de hasta 4 V para el caso de estimulación con amplitudes de 900 V y 1000 V. Esto implica que la amplitud del voltaje de estimulación aplicado puede llegar a tener hasta 40 V menos que el configurado por el usuario en estos casos. Para el valor de ensayo de 900 V se obtuvo el mayor error absoluto y relativo con valores de 40 V y 4.44 %, respectivamente. La prueba se considera satisfactoria, pues el mayor error relativo se encuentra por debajo del 5 %.
Las mediciones realizadas a la duración de los pulsos de estimulación arrojaron duraciones de 25.2 µs en la fase positiva y de 25.6 µs en la fase negativa en los pulsos con forma de onda bifásica. Tales resultados representan un error relativo de 0.8 % y de 2.4 %, respectivamente. En los pulsos con forma de onda monofásica no se observaron errores en la duración y tampoco se detectaron errores en las pruebas técnicas para comprobar el número de pulsos y el tiempo entre estos. Los resultados expuestos se consideran aceptables, al encontrarse por debajo del 5 %.
Con respecto a la seguridad del estímulo aplicado, el sistema de protección actúa ante la detección de un pulso adicional al que el usuario configura, la ocurrencia de pulsos con duración mayor de 55 µs o frente a pulsos con tiempos de repetición menores de 930 µs. Si existiera un corrimiento en la frecuencia de trabajo del microcontrolador, pudiera no detectarse a través del firmware la ocurrencia de estos eventos adversos. No obstante, actuaría siempre el circuito de protección analógico para evitar que se produzcan situaciones de este tipo. Se comprobó además que cuando estas tienen lugar, la fuente conmutada automáticamente se apaga y se descarga, además de que el acceso al generador de pulsos queda bloqueado, y de esta forma se inhibe la generación de cualquier tipo de estímulo eléctrico. Lo anterior evidencia la seguridad del sistema diseñado frente a la ocurrencia de fallos que alteren alguno de los parámetros físicos del estímulo que han sido ya mencionados.
4.3.- COMPARACIÓN CON EQUIPOS SIMILARES
Un EET similar al desarrollado en el presente trabajo se discute en [7], donde se presenta un diagrama en bloques en el cual la verificación de la seguridad del estímulo se realiza en el microcontrolador PIC17C756, a partir de las muestras de amplitud del voltaje y de la corriente de estimulación tomadas por la unidad programable. En [7] exponen, además, que los pulsos que conforman el estímulo eléctrico se obtienen a través de una fuente de voltaje conmutada y de un interruptor que abre y cierra la conexión entre la salida de la fuente y la del estimulador. El microcontrolador actúa directamente sobre la fuente conmutada y el interruptor. Independientemente de la verificación de la seguridad que realiza el microcontrolador, debe existir un circuito analógico dedicado a esta función, debido a que la unidad programable pudiera presentar comportamientos no deseados frente a una condición no prevista en la programación del sistema. Se considera, además, que es más seguro emplear un transformador de pulsos para generar los estímulos, debido a que el transformador elimina la posibilidad de que el paciente quede conectado a un nivel de voltaje de corriente directa. Estos aspectos se toman en cuenta en el trabajo presentado en este artículo, considerándolos como una ventaja sobre el EET descrito en [7].
El estimulador D185 de la empresa Digitimer constituye un referente entre los EET. Su uso en MNIO ha sido reportado por diferentes artículos científicos [6,10,12,19,20]. En [17] realizan un estudio donde someten al D185 a un conjunto de pruebas técnicas. Una de ellas consistió en estimular sobre una carga resistiva de 1 kΩ con el D185 y observar el estímulo. En esta prueba se obtuvo que la amplitud del voltaje de estimulación tiene un error relativo de 35 % respecto al valor teórico esperado. Se observó además una prolongación de la duración del pulso de 23 µs. Sin embargo, en el EET propuesto en este trabajo, todas las mediciones realizadas estuvieron por debajo del 5 % de error.
5.- CONCLUSIONES
Este artículo presentó el diseño de un EET con capacidad de entregar pulsos bifásicos con duración de 25 µs por fase o pulsos monofásicos con duración de 50 µs, con amplitud de hasta 1000 V. Los parámetros físicos de los estímulos eléctricos presentan errores relativos menores al 5 % respecto a los valores teóricos esperados, reportándose en las normas referentes a los estimuladores una tolerancia de un 30 % de error. El sistema de circuitos electrónicos dedicados a la vigilancia de la seguridad de los parámetros físicos del estímulo eléctrico mostró actuar correctamente, inhibiendo la generación de estímulos eléctricos ante los eventos potencialmente peligrosos que se indujeron. Los resultados obtenidos sugieren que el sistema desarrollado pudiera ser empleado como EET para evocar los potenciales motores en MNIO.

