










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
En la actualidad, la gestión eficiente de los recursos hidráulicos constituye una de las principales preocupaciones del siglo XXI [1, 2]. A nivel global, como consecuencia del crecimiento demográfico, del acelerado ritmo del desarrollo industrial y agrícola, de la urbanización, así como de la contaminación ambiental, se está desplegando una amenaza sin precedentes sobre los recursos hídricos disponibles, principalmente en regiones y países caracterizados por presentar estrés hídrico, por lo que en diversas regiones del planeta no resulta viable garantizar un suministro estable de este importante recurso [3-5].
La agricultura representa un componente importante de la cadena productiva alimentaria y representa el sector económico en el que la insuficiencia de recursos hídricos ocasiona el mayor impacto negativo [6, 7], realizando el 70% de las extracciones globales de agua y más del 90% de su uso consuntivo debido a la aplicación de los sistemas de riego [8, 9]. Los canales principales de riego constituyen los elementos más importantes de los sistemas de riego debido a que transportan los mayores volúmenes de agua [10].
La distribución de los recursos hidráulicos en los sistemas de riego se realiza sobre la base de las demandas hídricas de los diferentes usuarios durante un ciclo de riego [11]. Los bajos rendimientos de los cultivos, generalmente relacionados con la gestión deficiente de la distribución de agua en los canales principales de riego representan un grave problema para la agricultura [12, 13].
En los canales principales de riego se originan pérdidas de agua por infiltración, evaporación, así como por operaciones ineficientes en el posicionamiento de las compuertas [14, 15]. Por ello, la gestión de los recursos hídricos se debe realizar con una elevada efectividad para obtener desempeños competitivos y minimizar las pérdidas de agua por concepto de operación [16].
Las variaciones previstas e imprevistas en las demandas hídricas de los cultivos generan un amplio rango de condiciones de funcionamiento hidráulico en los canales [17, 18]. Consecuentemente, para garantizar la operación eficiente de los canales principales resulta necesario obtener un buen desempeño en todas las condiciones de funcionamiento y estados transitorios de los mismos, provocados por los movimientos de las compuertas transversales y laterales para suministrar de forma precisa los caudales requeridos por los usuarios [19, 20]. En la Figura 1 se muestra un diagrama de un canal principal de riego, en el cual es posible observar sus compuertas transversales y laterales.
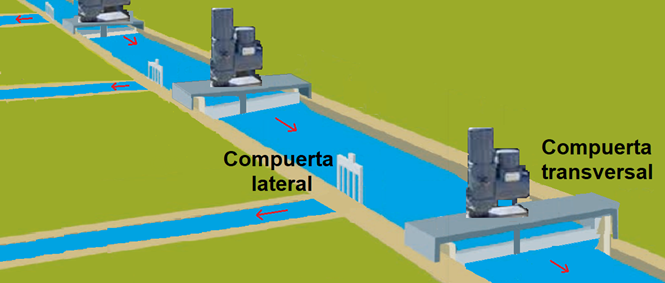
Los caudales derivados dependen del nivel de agua en las posiciones de las compuertas laterales, los que a la vez se encuentran condicionados por las posiciones de las compuertas transversales [21, 22]. Por ende, para realizar variaciones en los caudales laterales se requiere modificar las posiciones de las compuertas transversales [23, 24].
Desde el enfoque dinámico los canales principales de riego se caracterizan por presentar comportamientos dinámicos complejos debido a que constituyen plantas no lineales, con parámetros dinámicos distribuidos y variantes en el tiempo, y con retardos dominantes [25-27].
La aplicación de estrategias convencionales de control en los canales principales de riego ha sido una de las medidas utilizadas para garantizar la gestión eficiente de los recursos hídricos disponibles [9, 23]. Sin embargo, es bien conocido que estas estrategias no siempre han conducido a garantizar una correcta correspondencia entre las demandas y las entregas debido al complejo comportamiento dinámico de los canales [2, 28].
Por consiguiente, actualmente la comunidad científica internacional tiene el reto de desarrollar e implementar mejores soluciones de control que posibiliten aumentar la efectividad en la gestión de los canales principales de riego, así como minimizar las pérdidas de los recursos hídricos.
Los controladores PID continúan siendo hoy en día los predominantes en el control de la distribución de agua en los canales principales de riego debido a la sencillez de su estructura, capacidad de eliminar errores en estado estacionario mediante la acción integral, y anticipar el futuro con la acción derivativa, así como a su naturaleza robusta, a la prevalencia de una práctica bien establecida de instalación, sintonización y utilización de estos controladores, y a la familiarización con esta clase de controladores de un gran número de ingenieros y técnicos de instrumentación y control [2, 15, 22, 26]. Sin embargo, los controladores PID resultan insuficientes frente a procesos con retardo dominante [29, 30], y además, presentan la dificultad de ser muy sensibles a las variaciones de los parámetros dinámicos de los procesos, desajustándose con facilidad o incluso pudiendo llegar a la pérdida de la estabilidad de los sistemas de control [30].
En los últimos años se han propuesto diferentes controladores avanzados con detección y diagnósticos de fallos para el control efectivo de diferentes procesos industriales con comportamientos dinámicos complejos [31-33]. Entre los controladores avanzados desarrollados se encuentra el controlador con modelo interno (por sus siglas en inglés IMC), el cual ha ganado una gran aceptación debido a su simple estructura, diseño intuitivo, capacidad para rechazar perturbaciones, y propiedades de robustez, ver por ejemplo [34-36].
La estructura del controlador IMC desarrollada por Morari y Zafiriou en la década de los 80 [37] se encuentra integrada por un controlador, y un modelo matemático interno del proceso G m (s) conectado en paralelo con el proceso P(s). En la Figura 2 se muestra un diagrama con la estructura del controlador IMC convencional. En el diagrama se considera que todas las perturbaciones que actúan sobre el proceso se reducen a una perturbación equivalente d(s) en la salida del proceso.
En la Figura 2 se muestra un diagrama con la estructura del controlador IMC convencional. En el diagrama se considera que todas las perturbaciones que actúan sobre el proceso se reducen a una perturbación equivalente d(s) en la salida del proceso.
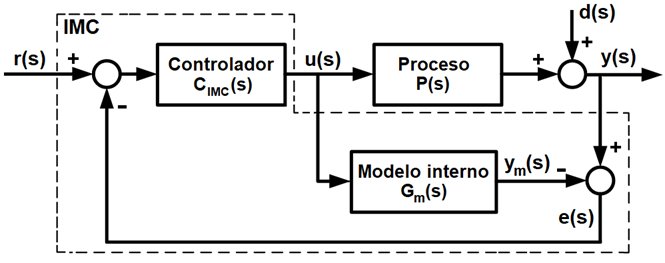
La señal de salida de lazo cerrado y(s) de esta estructura de control se representa como:
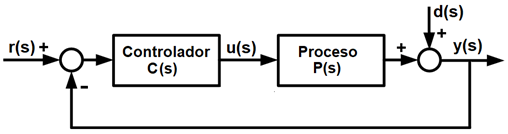
La estructura del controlador IMC puede ser reducida a la estructura clásica de control con realimentación (ver Figura 3) si se define la función de transferencia del controlador equivalente C (s) mediante la expresión:
Mediante el desarrollo de determinadas hipótesis, la expresión (2) del controlador equivalente
En correspondencia con las propiedades del controlador IMC, si el modelo matemático interno es perfecto
El controlador
En las últimas dos décadas los operadores de orden fraccionario han sido aplicados con resultados satisfactorios en el modelado y control de procesos con comportamientos dinámicos complejos, posibilitando obtener una elevada flexibilidad y robustez en el diseño de controladores, ver por ejemplo [39-43]. En el dominio de Laplace (siempre que las condiciones iníciales sean cero) el operador de orden fraccionario se corresponde con
Los controladores predictivos basados en modelos (por sus siglas en inglés MBPC) igualmente han sido propuestos para el control efectivo de la distribución de agua en los tramos de los canales principales de riego, ver por ejemplo [48-51]. Esta clase de controladores también dispone de un modelo matemático interno, el cual se utiliza para realizar predicciones sobre el comportamiento dinámico futuro del proceso a controlar, así como en el cálculo de las señales de control futuras. Sin embargo, como resultado de que la implementación práctica de estos controladores es muy compleja debido a que la señal de control se obtiene mediante la ejecución de un algoritmo de optimización, en muchos casos con restricciones, y además que se requiere de una alta preparación del personal de operación, la aplicación real de los controladores MBPC en los canales principales de riego ha sido muy limitada.
El objetivo de este trabajo consiste en el diseño de un controlador IMC-PID con filtro pasa bajo de orden fraccionario (IMC-FPID) para su aplicación por primera vez en el control de la distribución de agua en un tramo de un canal principal de riego.
La principal contribución de este trabajo consiste en demostrar que los controladores IMC-FPID diseñados en base a las especificaciones en el dominio de la frecuencia posibilitan mejorar el desempeño en el control de la distribución de agua en los tramos de los canales principales de riego.
El trabajo ha sido estructurado de la siguiente forma: en la Sección 2 se desarrolla la identificación del tramo de canal objeto de estudio. En la Sección 3 se realiza el diseño de los controladores IMC-FPID. En la Sección 4 se desarrolla el análisis y discusión de los resultados. Finalmente, en la Sección 5 se ofrecen las conclusiones.
2. Identificación del comportamiento dinámico de un tramo de un canal principal de riego
Para el diseño de controladores IMC-PID se requiere disponer de modelos matemáticos que describan de forma adecuada el comportamiento dinámico de los procesos a controlar [37].
El comportamiento dinámico de los canales de riego se describe mediante las ecuaciones de Saint-Venant [25], las cuales presentan serias dificultades matemáticas para su aplicación en el diseño de sistemas de control de la distribución de agua, ver por ejemplo [2, 9].
Los modelos matemáticos lineales son usualmente suficientes para capturar las características dinámicas fundamentales de los canales principales de riego, requeridas en el diseño de sistemas de control [2, 52]. Esta clase de modelos puede obtenerse mediante la aplicación de las herramientas de identificación de sistemas [53, 54].
La identificación de sistemas posibilita la construcción de modelos matemáticos simples de procesos dinámicos complejos sobre la base de las observaciones (mediciones) de sus señales de salida y entrada obtenidas en condiciones de funcionamiento, teniendo en cuenta que estas mediciones se verán afectadas por ruidos, perturbaciones e incertidumbres [53].
El primer tramo del canal principal Güira de Melena ubicado en la provincia de Artemisa es el utilizado en calidad de tramo de canal principal de riego. Este canal presenta un caudal nominal de 5 m3/s en toda su extensión, tiene una longitud aproximada de 5 km, está revestido con losas prefabricadas de hormigón, y cuenta con compuertas transversales aguas arriba y aguas abajo, moto-reductores, sensores de nivel, y sensores de posición de compuerta.
Para determinar el modelo matemático que describe el comportamiento dinámico de la variación de nivel aguas abajo alejado del tramo de canal objeto de estudio se empleó el método de identificación experimental basado en la respuesta escalón debido a su sencillez y efectividad [53].
En correspondencia con este método, se aplicó una señal de entrada
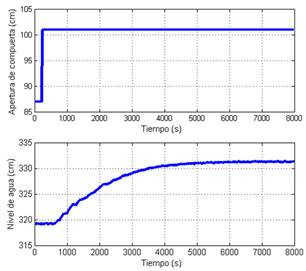
Fig. 4 Resultados del experimento de identificación con señal escalón de un tramo de un canal principal de riego.
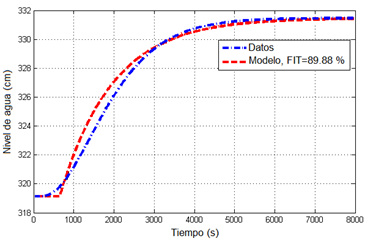
Para la validación del modelo matemático obtenido de la distribución de agua en el tramo de canal objeto de estudio se utilizó el método de validación cruzada [53]. Los resultados de validación se exhiben en la Figura 5. De esta figura se observa que el modelo obtenido describe el comportamiento dinámico del proceso real con un índice de ajuste FIT=89.88%, el cual se considera adecuado para la utilización de dicho modelo en el diseño de sistemas efectivos de control [53].
Diseño del controlador imc-pid con filtro de orden fraccionario
Para el diseño del controlador IMC-PID se realiza la factorización del modelo de la planta (3) en términos invertible y no invertible:
Donde
El controlador
El filtro
 (9)
(9)
donde
La propiedad fraccionaria del controlador
donde los parámetros de diseño del filtro λ y α se seleccionan para garantizar un margen de fase φ m y una frecuencia de cruce de ganancia ω c deseados.
Los parámetros de diseño del filtro λ y α se derivan mediante las siguientes expresiones [47]:
Considerando (9) de la expresión (7) se obtiene:
Para obtener el término invertible
Utilizando la aproximación de Padé de primer orden [30]:
el modelo de la planta
Definiendo en (14) los términos invertible y no invertible como:
de (12) se obtiene el controlador
Sustituyendo (17) en la expresión del controlador equivalente (2) se obtiene:
Realizando las siguientes sustituciones:
de la expresión (18) se deriva el siguiente controlador equivalente:
Por consiguiente, mediante la aplicación de la aproximación de Padé de primer orden se obtiene un controlador PID en serie con un filtro de orden fraccionario (IMC-FPID).
Si se utiliza la aproximación de Taylor de primer orden [30]:
el modelo de la planta
se representa aproximadamente como:
Definiendo los términos invertible y no invertible de (25) como:
de (12) se obtiene el controlador
Sustituyendo (28) en la expresión (2) se obtiene:
Realizando las siguientes sustituciones:
se deriva de (29) el siguiente controlador equivalente:
Consecuentemente, mediante la aplicación de la aproximación de Taylor de primer orden se obtiene un controlador PI en serie con un filtro de orden fraccionario (IMC-FPI).
Para el diseño de los controladores
especificación de margen de fase:
especificación de frecuencia de cruce de ganancia:
, donde
Utilizando las expresiones (10) y (11) se obtuvo: α=0.3333 y λ=6893.7.
En la Tabla 1 se presentan los parámetros de diseño de los controladores
Tabla 1 Parámetros de diseño de los controladores IMC-FPID, IMC-FPI e IMC-PID
| Controlador | Fα(s) | KC | TI | TD |
|---|---|---|---|---|
|
|
1/(1+17.45 s0.333) | 3.76 | 1290 | 0 |
|
|
1/(1+34.9 s0.333 | 8.68 | 1487.5 | 171.28 |
|
|
1/(1+16 s) | 8.11 | 1485 | 168.38 |
Con el objeto de realizar un análisis comparativo con otros controladores utilizados en la actividad práctica industrial se diseñó además un controlador IMC-PID convencional (
Los parámetros del controlador (34) se obtuvieron de las siguientes expresiones [46]:
Los valores obtenidos de los parámetros del controlador (34) considerando las expresiones (35)-(37) se muestran en la Tabla 1.
Análisis y discusión de resultados
En la Figura 6 se exhiben los resultados comparativos de las respuestas temporales del sistema de control de la distribución de agua en el tramo del canal objeto de estudio con los controladores diseñados C FPID (23) y C PID (33) frente a un paso en la referencia de nivel de 3.60 a 3.825 m. De dicha figura se observa que el sistema de control con el controlador C FPID alcanza el nuevo valor de referencia (régimen de operación) sin sobre impulso y en un tiempo de establecimiento de 3000 s, mientras que con el controlador C PID se alcanza con sobre impulso y en un tiempo de establecimiento de 5000 s, lo que representa un tiempo de establecimiento 1.66 veces mayor. Estos resultados revelan la conveniencia de aplicar un controlador C FPID para el control del proceso objeto de estudio debido a que permite alcanzar el nuevo régimen de operación con un mejor desempeño.

Fig. 6 Respuestas temporales del sistema de control de la distribución de agua con controladores IMC-FPID e IMC-FPI frente a cambios en la señal de referencia.
En la Figura 7 se muestran los resultados comparativos de las respuestas temporales del sistema de control de la distribución de agua en el tramo del canal objeto de estudio con los controladores diseñados

Fig. 7 Respuestas temporales del sistema de control de la distribución de agua con controladores IMC-FPID e IMC-PID frente a cambios en la señal de referencia.
De dicha figura se observa que el sistema de control con el controlador
De la Figura 8 es posible observar que en el instante de tiempo t=8000 s se origina una perturbación externa d(t) tipo escalón negativo debido a un incremento en la magnitud de apertura de la compuerta lateral del tramo de canal objeto de estudio (ver Figura 1) ocasionando una disminución del nivel de agua de 2.5 cm.

Fig. 8 Respuestas temporales del sistema de control de la distribución de agua con controladores IMC-FPID e IMC-PID frente al efecto de perturbaciones externas.
De la Figura 8 se observa que con el controlador
Para evaluar el desempeño de los controladores diseñados se utilizó el índice de desempeño de la integral del error absoluto (IAE) [30, 56]:
 (38)
(38)
Donde
En la Tabla 2 se exhiben los resultados comparativos del índice de desempeño IAE definido en (38) del Sistema de control del proceso objeto de studio con los controladores
Tabla 2 Índice de desempeño de los controladores IMC-FPID y IMC-PID
| Controlador | IAE |
|---|---|
|
|
5200 |
|
|
7800 |
Por consiguiente, el controlador IMC-FPID posibilita obtener mejoras significativas en el desempeño del sistema de control de la distribución de agua en el tramo de canal objeto de estudio, lo cual implica satisfacer en el tiempo establecido las demandas hídricas de los diferentes usuarios durante los ciclos de riego, así como reducir las pérdidas de agua por concepto de operación.
Conclusiones
Mediante la aplicación de las herramientas de identificación de sistemas se obtuvo un modelo matemático del comportamiento dinámico de la distribución de agua en el primer tramo del canal principal de riego Güira de Melena.
Usando el modelo matemático obtenido se realizó el diseño de un controlador IMC-FPID, de un controlador IMC-FPI, y de un controlador convencional IMC-PID para el control de la distribución de agua en el tramo del canal principal de riego objeto de estudio.
Los resultados comparativos de las respuestas temporales del sistema de control del proceso objeto de estudio con los controladores diseñados revelaron que el controlador IMC-FPID es el que posibilita obtener el mejor desempeño en el seguimiento de forma efectiva de las variaciones en la señal de referencia (régimen de operación), así como en el rechazo a los efectos negativos de las perturbaciones externas.
Los resultados de la evaluación comparativa del desempeño de los controladores IMC-FPID vs IMC-PID mediante el índice de la integral del error absoluto (IAE) mostraron que el mejor desempeño se obtiene con el controlador IMC-FPID.
Es importante destacar que en este trabajo se presentan las primeras experiencias relacionadas con el diseño de un controlador IMC-FPID para el control efectivo de la distribución de agua en un tramo de un canal principal de riego, el cual debido a su precisión posibilita satisfacer en el tiempo establecido las demandas hídricas de los diferentes usuarios durante los ciclos de riego, así como reducir las pérdidas de agua por concepto de operación.
La siguiente etapa de nuestra investigación consiste en la implementación del controlador diseñado IMC-FPID en el primer tramo del canal principal de riego Güira de Melena.

