










 Serviços customizados
Serviços customizados Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkIntroducción
Las estadísticas de Naciones Unidas estiman que para el año 2050, el número de personas de 80 años o más se habrá multiplicado por 3 [1, 2]. Como resultado del envejecimiento de la población, el número de personas mayores o frágiles que necesitan ayuda en sus actividades diarias se incrementa vertiginosamente [3, 4]. Cuba, en solo 50 años, ha transitado del 9,4% de ancianos en el año 1970 al 20,1% en la actualidad [5]. Precisamente este sector de la población se enfrenta a las caídas como riesgo accidental más frecuente. Aproximadamente, un tercio de la población de 65 años o más que viven en la comunidad experimentan al menos una caída por año [6]. Los factores de riesgo de caídas incluyen músculos débiles, marcha inestable, deterioro cognitivo y medicamentos psicoactivos [7]. Posteriormente, la frecuencia aumenta hasta casi el 50% para aquellas personas mayores de 85 años. Entre el 20% y el 30% de las caídas provocan lesiones, pérdida de la independencia, incremento del miedo, la ansiedad o la depresión y la necesidad de atención médica, lo que conduce a la reducción de las actividades de la vida diaria de este sector poblacional [6, 7, 8].
El nivel de integración alcanzado en los sistemas electromecánicos, ha permitido el desarrollo de las UMI, los cuales son capaces de implementar acelerómetros (ACC), giroscopios (Gyro) y magnetómetros (MAG) en un reducido espacio [6, 9, 10, 11, 12]. Los ACC permiten distinguir entre actividades estáticas y dinámicas, los Gyro detectan el movimiento del cuerpo humano mediante la transformación de ángulos triangulares y triaxiales, mientras que los MAG, miden el campo magnético absoluto de todas las cantidades relativas como aceleraciones y velocidades angulares [13], estos sensores permiten la detección de caídas [4, 6, 7, 8, 9, 10, 11, 12, 13, 14]. Estas funcionalidades unidas a su bajo costo, peso y consumo de energía [11] los hace idóneos para desarrollar aplicaciones de apoyo a estudios relacionados con el análisis del movimiento humano y en especial los estudios de telerehabilitación.
La diferenciación entre caídas y actividades de la vida diaria se ha basado en la implementación de tres categorías de tipos de algoritmos, estos son los basados en umbrales, aprendizaje automático y aprendizaje profundo [2]. Los algoritmos basados en umbrales son muy utilizados por su eficiencia computacional, lo que les permite implementarlos fácilmente en aplicaciones en tiempo real [5, 6]. Wang et al [12] calcularon la magnitud de la aceleración, la magnitud de la raíz del producto cúbico de la aceleración y la magnitud de la raíz del producto cúbico de la velocidad angular a partir de los datos de aceleración y velocidad angular obtenidos de una UMI colocada en la cara anterior del tórax para desarrollar un algoritmo de detección de caídas basado en umbrales. En el estudio, el algoritmo se evaluó utilizando sus datos experimentales y dos conjuntos de datos públicos diferentes (Cogent Labs y UMAFall). Se obtuvieron 98.3%, 98.0% y 96.6% de sensibilidad y 100%, 96.6% y 83.2% de especificidad respectivamente. H. Jung et al [13] a partir de datos inerciales obtenidos de una UMI, calcularon MVS de aceleración, la MVS de velocidad angular y el ángulo vertical utilizando un filtro complementario con un controlador integral proporcional y desarrollaron un algoritmo de detección de caídas previo al impacto basado en umbrales a partir de estos parámetros. El rendimiento del algoritmo se evaluó experimentalmente en laboratorio y en una evaluación objetiva del conjunto de datos públicos de la base SisFall. En la literatura Kangas et al [17], fijaron diferentes umbrales utilizando acelerómetros triaxiales fijados en la cintura, la muñeca y la cabeza calculando el vector de suma total, el vector de suma dinámica y la aceleración vertical obteniendo una sensibilidad de 97%-98% y especificidades de un 100%, el algoritmo se evaluó utilizando sus datos experimentales. Bourke et al [18] fijan un sensor a la cintura de los sujetos usando un cinturón, y calculando aceleración asociada con el impacto, ángulo de la postura y estimación de la velocidad vertical; detectando una caída con sensibilidades superiores al 94.6% y especificidades de más del 96.94% sobre los datos de su propio experimento. Carnuccio et al [19] en su investigación determinan la inclinación que sufre la persona durante la caída comparando el ángulo inicial en que se encuentra la persona (fase inicial), con el que adquiere durante la fase de reposo final. El cálculo de los diferentes ángulos se realiza aplicando producto escalar de los vectores de aceleración, correspondientes al estado inicial con el vector de aceleración que produce el movimiento en un instante determinado. Las variables de aceleración, velocidad angular, el ángulo vertical y la característica del triángulo fueron utilizados por Ahn et al [20] como valores de umbral para detectar las caídas, el estudio se evaluó utilizando el conjunto de la base SisFall, reportando una sensibilidad de un 100% y una especificidad de un 83.9%.
Los trabajos anteriormente esbozados se auxiliaron de bases de datos públicas o locales para la evaluación de las propuestas de algoritmos basados en señales inerciales que les permitiera comparar sus resultados entre sí o evaluar la factibilidad del mismo para condiciones diferentes de experimentación. En este trabajo se presenta un algoritmo de detección de caídas basado en umbrales a partir de datos obtenidos de la base de datos pública CGU-BES Dataset, que no exige un elevado costo computacional y que permita validar una versión piloto de un protocolo experimental para detección de caídas en sujetos sanos en el Centro de Biofísica Médica (CBM) como parte del desarrollo de aplicaciones para un sensor híbrido basado en UMI y electromiografía de superficie (EMGs).
Materiales y métodos
El algoritmo presentado para la detección de caídas fue desarrollado a partir de las variables de aceleración, velocidad angular y el ángulo vertical registrados con el sensor UMI. Este se basó en el cálculo de la MVS de aceleración AM
xyz
ver ecuación (1), esta es una medida simple e intrínseca para cualquier actividad de impacto, comúnmente empleada para detectar la ocurrencia de caídas [12, 13, 20]. En la práctica una caída es detectada, cuando la MVS de la aceleración AM
xyz
supera un umbral predefinido. La aceleración instantánea del tronco es  donde a
x
(t), a
y
(t), a
z
(t) representan aceleraciones en los ejes frontal, longitudinal y sagital respectivamente en un sistema de coordenadas tridimensional.
donde a
x
(t), a
y
(t), a
z
(t) representan aceleraciones en los ejes frontal, longitudinal y sagital respectivamente en un sistema de coordenadas tridimensional.
 (1)
(1)
La MVS de la velocidad angular W xyz está representada por (2),
 (2)
(2)
Los datos de aceleración se transformaron en inclinaciones del tronco en los planos sagital y frontal, a través de (3) y (4), representando en que magnitud en grados los segmentos corporales se desviaron del eje vertical [13, 20], de modo que estar de pie es equivalente a 0˚ y la posición de decúbito supino en el suelo sería de 90˚.
 (3)
(3)
 (4)
(4)
El procesamiento de los datos recopilados del sensor UMI para determinar la ocurrencia o no de caídas, se realizó a partir del algoritmo mostrado en la Fig. 1. Para la selección de los umbrales se tuvo en cuenta el estado del arte en cuanto a la ubicación del sensor UMI en la cara anterior del tórax [12, 13, 17, 20, 21]. En la literatura [22] muestra que la elección adecuada de cualquier umbral de decisión viene claramente determinada por las características del sensor empleado (no se puede predefinir un umbral general con independencia del sistema de medición). Seleccionando así los umbrales que para esta ubicación mostraron mejores porcientos en reconocer la ocurrencia de una caída, definiendo estos como los seleccionados para ser utilizados en este trabajo.
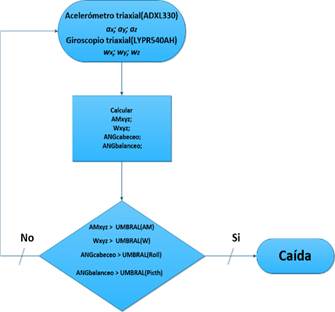
Figura 1 Diagrama de flujo del algoritmo para detección de caídas, donde UMBRAL(AM) representa el valor del umbral de AM xyz , UMBRAL(W) el correspondiente al umbral de la W xyz , UMBRAL(Roll) y UMBRAL(Picth) los umbrales de ANGcabeceo y ANGbalanceo respectivamente.
Utilizando el software Matlab R2019b y aplicando las fórmulas antes expuestas se analizaron los datos de CGU-BES Dataset, solo si cada uno de los umbrales es rebasado durante la ejecución de una acción se determina una caída como se aprecia en la fig. 2.
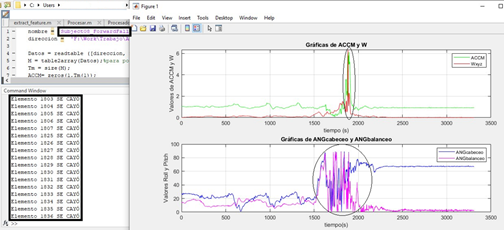
Figura 2 Detección de caída hacia delante del sujeto 8 del dataset. En las gráficas se muestran encerrados en círculos el momento en que los parámetros analizados rebasan los umbrales.
Para validar el algoritmo propuesto se utilizó la base de datos pública CGU-BES Dataset, en la que quince participantes sanos (11 hombres, 4 mujeres; 21,8 ± 1,8 años; 167,7 ± 6,0 cm; 63,0 ± 10,1 kg) realizaron caídas simuladas y actividades de la vida diaria AVD. Cada participante realizó cuatro caídas simuladas definidas como una caída hacia adelante, una caída hacia atrás, una caída lateral hacia el lado derecho y una caída lateral hacia el lado izquierdo; mientras que los otros ocho tipos de AVD se definen como caminar continuo, levantar y bajar las manos, un salto hacia adelante, un salto hacia arriba, agacharse, acostarse hacia adelante, acostarse hacia atrás y caminar seguido de ponerse de pie y luego sentarse, todos a partir de la marcha. Los datos cinemáticos de esta fueron recopilados por un sistema de sensor inalámbrico portátil. El sistema contenía un acelerómetro triaxial (ADXL330) con un rango de escala completa de ±3,6 g con ±0,3 % de no linealidad y una sensibilidad de 300 mV/g, un giroscopio triaxial (LYPR540AH) con un rango de escala completa de ±400 grados/seg (dps) y una sensibilidad de 3,2 mV/dps, un microcontrolador (MSP430F5438) y un módulo Bluetooth (BTC-1022). El sensor se posiciona a la cara anterior del tórax mediante una banda elástica. Las aceleraciones del tronco y las velocidades angulares se digitalizaron en paralelo a través de un convertidor analógico-digital de 12 bits incorporado al sistema, a una frecuencia de muestreo de 200 Hz. Las series digitales fueron transmitidas vía Bluetooth a una computadora personal [23].
El rendimiento del sistema de detección de caídas debe evaluarse mediante una serie de pruebas con análisis estadístico. Existen cuatro posibles casos durante la detección de caídas, estos son Verdadero positivo (VP): se produce una caída y el sistema la detecta; Falso positivo (FP): se produce una AVD, pero el sistema detecta una caída; Falso negativo (FN): se produce una caída, pero el sistema detecta una AVD; Verdadero negativo (VN): se produce una AVD y el sistema detecta una AVD. Los criterios de evaluación incluyen sensibilidad, especificidad y precisión definidas en (5), (6) y (7) respectivamente:
 (5)
(5)
 (6)
(6)
 (7)
(7)
La ecuación (5) establece la relación entre los eventos VP y todos los eventos de caída, lo que significa la capacidad de detectar una caída. La especificidad (6) es la relación entre los eventos VN y todas las AVD, lo que significa la capacidad de detectar solo las caídas. Mientras que la precisión (7) se determina como la proporción entre la suma de verdaderos positivos y verdaderos negativos con la suma de verdaderos positivos y negativos y falsos positivos y negativos; en la práctica constituye el porciento de caídas detectadas.
Resultados y discusión
Sensibilidad, especificidad y precisión
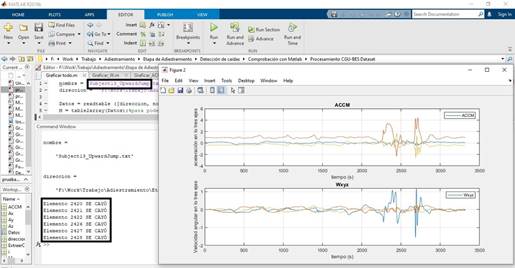
En la práctica se utiliza la combinación de algoritmos de detección, dígase la aplicación del análisis de varias variables al mismo tiempo para determinar la ocurrencia de una caída puesto que este método refleja un mayor valor de sensibilidad y especificidad y precisión que se refiere a la capacidad de detectar la ocurrencia de caídas y discernir caídas de AVD [12, 13, 17, 20, 21]. Al implementarse el algoritmo para los 15 sujetos de la base de datos CGU-BES Dataset, se obtiene una sensibilidad promedio de un 91.6%, una especificidad de 88.3% y una precisión de 89.4%, debido a que algunas AVD se detectaron como caídas, especialmente movimientos muy dinámicos como acostarse hacia delante y hacia atrás y saltar hacia delante y hacia arriba como se muestra en la fig. 3.
Comparación con otros estudios
En la Tabla 1 se presenta una comparación entre los niveles de sensibilidad, especificidad y precisión de distintas investigaciones previas basados en umbrales y aplicados a distintas bases de datos, téngase en cuenta que el uso de una base de datos global no está generalizada en este tipo de estudio puesto que cada investigador usa bases de datos locales desarrolladas en específico para su experimento como es el caso de [18] y en algunos casos de los dos tipos como [12, 13], esto trae como consecuencia que el rendimiento de los algoritmos sean diversos, a partir de la calidad de la base de datos generada y el algoritmo de detección.
Tabla 1 Comparación con estudios publicados.
| Autores | Algoritmo | Cant. de sensores | Sensibilidad | Especificidad | Precisión |
|---|---|---|---|---|---|
| Bourke et al [21] | Basado en umbrales | 2 | - | 83.3% | - |
| Bourke et al [18] | Basado en umbrales | 1 | 100% | 78.7% | 87.2% |
| Kangas et al [17] | Basado en umbrales | 3 | 97% | 100% | - |
| Wang et al [12] | Basado en umbrales | 2 | 98.3% | 100% | - |
| Ahn et al [20] | Basado en umbrales | 1 | 100% | 83.9% | 90.3% |
| En este estudio | Basado en umbrales | 1 | 91.6% | 88.3% | 89.4% |
En la Tabla 1 se puede apreciar que los resultados del algoritmo propuesto se encuentran en el orden de los que se han obtenido hasta el momento. Sin embargo, observamos que existe una tendencia a un mejor rendimiento en estudios donde se emplearon más de un sensor, aunque el rendimiento de los algoritmos depende en igual medida de las actividades que fueron evaluadas en las bases de datos (estas pueden englobar movimientos más dinámicos que aportan una mayor tasa de falsos positivos), así como la cantidad de sujetos bajo estudio cuando es pequeña tiende a que la precisión de detección de caídas sea relativamente alta. La edad de los sujetos de prueba es otro factor que influye, pues los adultos mayores tienen diferentes características de control postural cuando se exponen a perturbaciones externas que inician caídas, y pueden tocar el suelo antes que los más jóvenes. Por lo tanto, los resultados de la evaluación del modelo basados en adultos más jóvenes tienden a darnos realidades distintas de la edad objetivo.
Conclusiones
Con este trabajo se ha conseguido la implementación de un algoritmo para la detección de caídas basado en umbrales a partir de los datos de aceleración proporcionados por un sensor UMI colocado en la cara anterior del tórax. El algoritmo propuesto tiene un bajo coste computacional, obteniendo resultados satisfactorios en términos de sensibilidad, especificidad y precisión en condiciones simuladas, lo que lo hace apto para ser implementado en plataformas de tiempo real, por lo que será factible su uso para la implementación del protocolo experimental de detección de caídas mencionado anteriormente. En futuros estudios se considerarán características adicionales como la velocidad y aceleración vertical, también está pendiente el uso de la señal EMGs, así como la inclusión de más de un sensor para reducir la tasa de detección falsa y aumentar así la robustez y rendimiento del sistema. Además, dado que se utilizó una base de datos en la que los participantes eran jóvenes, futuros experimentos se llevarán a cabo con participantes de mayor edad, obteniendo así edades más alineadas con los grupos de usuarios objetivo.

