










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
El contexto ambiental actual reclama acción de todos los sectores en el marco del compromiso de alcanzar los objetivos de desarrollo sostenible (ODS) para el año 2030. Dentro de los ejes estratégicos de desarrollo en Cuba, país insular en desarrollo, el programa de recursos naturales y medioambiente incluye acciones para cumplir el objetivo 14 (vida submarina), en la se que establece un marco para ordenar y proteger de manera sostenible los ecosistemas marinos y costeros de la contaminación terrestre, así́ como para abordar los impactos de la acidificación de los océanos [1]. Para lograr este objetivo, una de las metas es aumentar el conocimiento científico, la investigación y la tecnología a fin de mejorar la salud de los océanos y potenciar la contribución de la biodiversidad marina al desarrollo de los estados insulares en desarrollo [2]. Para contribuir a este ODS ha surgido un gran enteres en el desarrollo y despliegue de vehículos autónomos para estudiar y proteger los océanos [3].
Una de estas embarcaciones son los vehículos autónomos de superficie (ASV), embarcaciones marinas que tienen un alto grado de autonomía y no necesitan la acción directa de los seres humanos. Estos buques tienen un gran número de aplicaciones, principalmente en el campo de la investigación ambiental. La mayoría de las misiones que llevan a cabo estos vehículos se enmarcan en el escenario de seguimiento de caminos, [16], [4], para lo que contar con un algoritmo o ley de guiado se hace necesario. Esta ley es utilizada con el objetivo reducir el error de seguimiento del camino (distancia entre la posición del vehículo y la trayectoria predefinida). Otro problema que afecta el cumplimiento de las misiones es la influencia de las perturbaciones ambientales, principalmente el viento y las corrientes marinas. Por lo tanto, es importante que el algoritmo de guiado elegido pueda garantizar cero errores de seguimiento del camino, a pesar de la influencia de esas perturbaciones ambientales.
La gran mayoría de sistemas de guiado están formados por dos partes fundamentales: una es la encargada de la generación del camino y la otra de los algoritmos que hacen posible su seguimiento. Para la construcción de cualquier ruta o camino, juega un papel decisivo la geometría de este, por ello dentro de las diversas clasificaciones que existen, hay dos que son de vital importancia: los caminos rectos y los curvos [15]. La solución del problema de guiado en caminos rectos, en presencia de perturbaciones, ha sido resuelto por Hernández-Morales [4] y Valeriano-Medina [5]. No obstante, el seguimiento de caminos circulares y mixtos no ha sido abordado en toda su extensión.
Actualmente existe gran variedad de algoritmos para el seguimiento de caminos, entre los más usados están los que son basados en alguna de las estrategias siguientes: Línea de Visión (LOS, Line of Sight), Persecucion (PP, Pure Pursuit) y Direccion Constante (CB, Constant Bearing) [6]. Para el caso de seguimiento de caminos curvos, en [7] se presenta un esquema de guiado I-LOS el que, adaptado a la geometría del camino, permite, en presencia de corrientes marinas, el seguimiento de dicha trayectoria. A la vez demuestra como esta estrategia permite la reducción del error de seguimiento en presencia de las perturbaciones marinas, sin añadir una alta complejidad, desde el punto de vista de control. Otro enfoque acertado para resolver el problema de seguimiento de trayectorias curvas para vehículos marinos es presentado en [8] y [9]. Donde se define un controlador que garantiza la convergencia del vehículo a la trayectoria y al mismo tiempo proporciona acotación de la velocidad de balanceo. El controlador debe garantizar una velocidad de balanceo limitada para trayectorias curvas [10]. En [11] se presenta un algoritmo de control de retroceso basado en la retroalimentación de estado, para abordar el problema de seguimiento de la trayectoria de un buque de superficie no tripulado (ASV), considerando un modelo dinámico subactuado, no lineal, de tres grados de libertad (DOF). Se diseña un controlador de seguimiento de trayectoria que puede seguir trayectorias curvas con alta precisión. El controlador propuesto fue, además, enriquecido mediante la incorporación de una acción integral adicional para mejorar el rendimiento y la precisión del sistema de control. Investigaciones como [10] considera una parametrización global de la trayectoria curva general, para resolver el problema de seguimiento de caminos curvos, utilizando una combinación de un observador de corrientes oceánicas y un controlador basado en la estrategia de guiado LOS, que adopta una distancia de anticipación que varía en el tiempo, según el error de seguimiento de la ruta.
El algoritmo NLGL (Nonlinear guidance law), es un algoritmo desarrollado, inicialmente, para su uso en vehículos aéreos [12] y [6], para el seguimiento de caminos rectos y curvos. Su utilización en vehículos marinos se ha venido trabajando, dando buenos resultados [13]. Se comprobó que el esquema de guiado basado en el algoritmo NLGL sigue las trayectorias rectas de manera satisfactoria en presencia de perturbaciones medioambientales [13], [4], sin embargo, este análisis no se ha realizado para el seguimiento de caminos curvos. Este trabajo se estudia como aplicar un esquema de guiado basado en el algoritmo NLGL para un pequeño USV, llamado Krick Felix, para el seguimiento de caminos curvos. Se presenta el modelo dinámico del vehículo, así como el de las perturbaciones marinas. Se escogerá el camino de Dubin para la generación del camino mixtos, compuesto por tramos rectos y arcos de circunferencia. Es presentada el algoritmo NLGL para caminos curvos y su aproximación lineal para caminos rectos y circulares. Los resultados del esquema propuesto durante el seguimiento de caminos por parte del Krick Felix son evaluados mediante simulación.
Descripción general del Krick Felix
El Krick Felix (Figura 1) es un modelo a escala de un buque del puerto de Hamburgo que está siendo utilizado por el Grupo de Automatización, Robótica y Percepción (GARP) de la Universidad Central “Marta Abreu” de Las Villas (UCLV) para el estudio de guiado y control en vehículos autónomos. El barco original fue construido en el año 1960 y ha sido usado para operaciones portuarias y de transportación. Para su movimiento la embarcación cuenta con un motor eléctrico y una propela acoplada. Algunas de las principales especificaciones de la embarcación se muestran en la Tabla 1.
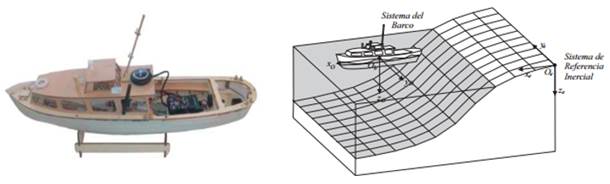
Tabla 1 Especificaciones geométricas, físicas e inerciales del Krick Felix
| Parámetros | Símbolo | Valor |
|---|---|---|
| Longitud | L | 0.634 m |
| Ancho | B | 0.128 m |
| Calado | T | 0.035m |
| Masa | m | 0.8 kg |
| Radio | r | 0.317 m |
| Momento de Inercia | Iz | 0.032 kgm2 |
| Velocidad Crucero | u0 | m/s |
Modelo dinámico del ASV Krick Felix
Durante la navegación, un vehículo marino experimenta movimientos en los 6 grados de libertad (GDL). Los grados de libertad están determinados por los desplazamientos y rotaciones independientes que especifican totalmente la posición y orientación del vehículo, acorde a la Figura 1. En la Tabla 2 se resume la nomenclatura empleada para describir el movimiento de las embarcaciones marinas [14].
Tabla 2 Notación utilizada para vehículos marinos.
| Traslación | Fuerza | Velocidad | Posición |
|---|---|---|---|
| Avance | |||
| Desplazamiento Lateral | |||
| Arfada | |||
| Rotación | Momento | Velocidad | Angulo |
| Balanceo | |||
| Cabeceo | |||
| Guiñada |
Al analizar los movimientos de las embarcaciones marinas en los 6 GDL es conveniente definir dos sistemas de coordenadas como se indica en la Figura 1. El sistema de referencia móvil es convenientemente fijado en el vehículo y es llamado Sistema del Barco. El origen de este sistema usualmente se sitúa en el Centro de Gravedad (CG), siempre y cuando pertenezca al plano principal de simetría, como es el caso del Krick Felix. Para vehículos marinos los ejes x 0 , y 0 , z 0 coinciden con los ejes principales de inercia y son usualmente definidos como: x 0 - eje longitudinal (de popa a proa), y 0 - eje transversal (de babor a estribor) y z 0 - eje normal (de arriba a abajo).
Asumiendo que los barcos son longitudinal y lateralmente metacéntricos con pequeñas amplitudes de los ángulos  , se puede descartar la dinámica de balanceo y cabeceo. La dinámica relativa al movimiento de arfada también se puede despreciar ya que el barco flota con z ≈ 0. El modelo resultante del barco en el plano horizontal se convierte entonces en un modelo de 3 GDL. Los estados para la embarcación son (ecuación 1):
, se puede descartar la dinámica de balanceo y cabeceo. La dinámica relativa al movimiento de arfada también se puede despreciar ya que el barco flota con z ≈ 0. El modelo resultante del barco en el plano horizontal se convierte entonces en un modelo de 3 GDL. Los estados para la embarcación son (ecuación 1):
 (1)
(1)
donde η denota el vector de posición expresado en el marco de referencia en tierra, ν representa el vector velocidad lineal y angular con coordenadas en el sistema de la embarcación y τ representa las fuerzas y momentos que actúan sobre el vehículo en el sistema de coordenadas del barco. Las ecuaciones cinemáticas (2 y 3) se pueden expresar en forma vectorial utilizando las transformaciones de ángulos de Euler como [13]:
 (2)
(2)
El modelo dinámico empleado sigue la metodología propuesta por [14] y presenta la siguiente estructura [4]:
 (3)
(3)
Donde:
vr = v - vc |
representa la velocidad relativa del vehículo con: v que representa el vector velocidad lineal (ecuación 1) y angular de la embarcación y vc representa la velocidad de las corrientes marinas. |
M |
es la matriz de inercia (incluida la matriz de masas añadidas MA y la matriz de cuerpo rígido MRB. |
C(ν) |
es la matriz de los términos de Coriolis, (incluida la matriz de Coriolis de masas añadidas CA y la matriz de Coriolis de cuerpo rígido CRB. |
D(v) |
es la matriz de amortiguamiento. |
τ |
representa el vector de fuerzas y momentos de las entradas de control. |
τW |
representa el vector de fuerzas y momentos proporcionado por el viento. |
Todos los valores de los parámetros del modelo fueron obtenidos de acuerdo con la estructura geométrica del vehículo, la información de inercial y un conjunto de experimentos. Estos resultados son presentados detalladamente en [4].
Generación de caminos curvos
Para la generación de caminos curvos resulta conveniente utilizar el método de Dubin pues, como se explica en [7], este método destaca por su sencillez. Un camino de Dubin esta conformado por líneas rectas y arcos de circunferencia, los que quedan inscritos entre los segmentos rectos.
Para definir los arcos de circunferencia, hacemos uso de la Figura 2. En la figura se muestra parte de un camino formado por segmentos rectos y arcos de circunferencias. Se pueden observar tres puntos (WP): Pk, Pk + 1 y Pk + 2, los que conforman el tramo. El vehículo debe moverse desde Pk hacia Pk + 1 y; una vez vencido el tramo, hasta Pk + 2. Los puntos de conmutación, entre los segmentos rectos y el arco de circunferencia, se denotan por Pi, Pi + 1 y Pk + 2 [15].
Para poder calcular los parámetros de la circunferencia, el método debe cumplir con las siguientes condiciones [7]:
El centro de la circunferencia pertenece a la bisectriz del ángulo que se forma en la intersección de los dos segmentos rectos.
La distancia entre los puntos de conmutación y el WP que no formara parte de la ruta generada es un parámetro fijo y se denota por R1.
El centro de la circunferencia  a generar, acorde a la Figura 2, se puede calcular de la siguiente manera (ecuación 4):
a generar, acorde a la Figura 2, se puede calcular de la siguiente manera (ecuación 4):
 (4)
(4)
donde: m k y m k + 1 son las pendientes de los segmentos rectos que se representan en la Figura 2.
Para cumplir con la segunda condición, las coordenadas de los puntos de conmutación quedan definidas por (ecuación 5):
 (5)
(5)
Como los segmentos rectos del camino son tangentes a la circunferencia en los puntos Pi y Pi+1 respectivamente, entonces son perpendiculares a los radios de la circunferencia en esos puntos. Estableciendo las relaciones entre las pendientes de los segmentos y sus respectivos radios perpendiculares y considerándolo un sistema de ecuaciones cuyas incógnitas son las coordenadas del centro de la circunferencia. La resolución del sistema arroja los siguientes resultados [7] (ecuación 6 y 7):
 (6)
(6)
 (7)
(7)
El centro de la circunferencia también puede encontrarse directamente de la Figura 2 de la siguiente manera (ecuación 8):
 (8)
(8)
donde R > 0 es el radio de la circunferencia y λ es un parámetro que da idea del sentido en el que es recorrida la circunferencia. Este último toma valor 1 si el sentido del recorrido es horario, o valor -1, si es antihorario. Los arcos de circunferencia generados esquivan los WP del camino a excepción de los de inicio y fin de ruta [7].
De cualquiera de las expresiones anteriores se puede despejar el producto λR, puesto que los valores de las coordenadas del centro de la circunferencia estan definidas completamente según las (ecuaciónes 5 y (6)). Por tanto (9):
 (9)
(9)
Con este método es posible construir vectores donde se almacenen los parámetros de cada tramo, a partir de los cuales, el camino puede ser computado con facilidad.
Algoritmo de guiado NLGL
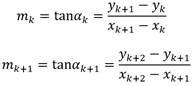
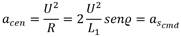
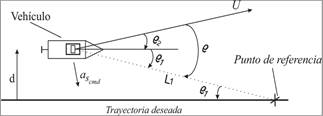
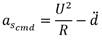
El algoritmo de guiado NLGL se basa en escoger un punto de referencia en la trayectoria deseada y a partir de este generar un comando de aceleración lateral [12]. En la Figura 3 se muestra como el punto de referencia se encuentra a una distancia L1 hacia adelante del vehículo.
donde: U es el modulo de la velocidad del vehículo, L1 representa la distancia que separa la posición del vehículo del punto de referencia situado en la trayectoria a seguir, ϱ es ángulo comprendido entre U y la distancia L1,  es el comando de aceleración lateral y R es el radio del circulo virtual.
es el comando de aceleración lateral y R es el radio del circulo virtual.
El comando de aceleración lateral es el encargado de que el vehículo converja a la trayectoria deseada, a medida que va disminuyendo el error también disminuye la aceleración, llegando al punto de ser cero. Esta acción de mando permite que el vehículo siga el camino deseado. Este comando no es más que la aceleración centrípeta necesaria para seguir el camino circular de radio R definido por la posición del punto de referencia, la posición del vehículo y tangencialmente al vector de velocidad del vehículo como se muestra en la Figura 3.
La aceleración lateral queda definida como (10):
 (10)
(10)
Como se aprecia en la Figura 3 existe una relación entre la distancia L1 y R que expresada geométricamente como (11):
 (11)
(11)
Por lo que, sustituyéndola en (10), se obtiene:
 (12)
(12)
De la ecuación (12) cabe destacar que la dirección de la aceleración depende del signo del ángulo entre la distancia L1 y U. Además, se puede apreciar que cuando el vehículo esté alejado del camino, el ángulo ϱ será de mayor amplitud, por lo que la aceleración tendrá un valor elevado, pero cuando el vehículo se encuentre sobre la línea del camino este ángulo tendrá valor cero, por lo que no existirá aceleración lateral, siendo así como el algoritmo consigue converger al camino deseado.
Cabe destacar que el comando de aceleración lateral,  , no coincide con ninguno de los estados declarados para el modelado del sistema, ecuación (1). Teniendo en cuenta la ecuación (10) y sabiendo que existe una relación entre la velocidad angular y la velocidad lineal dada por (13):
, no coincide con ninguno de los estados declarados para el modelado del sistema, ecuación (1). Teniendo en cuenta la ecuación (10) y sabiendo que existe una relación entre la velocidad angular y la velocidad lineal dada por (13):
 (13)
(13)
donde: rd es la velocidad angular necesaria para que el vehículo siga la circunferencia de radio R a la velocidad lineal U. Se obtiene una expresión que relaciona a la velocidad de giro deseada en el movimiento de guiñada con el comando de aceleración lateral como (14):
 (14)
(14)
De esta manera, a partir del comando de aceleración lateral generado por el algoritmo NLGL, resulta posible determinar el valor necesario de velocidad angular rd, para que generar en el lazo interno la señal de comando en un esquema de guiado en cascada, como se presenta en la Figura 4, [13].

Linealización del esquema NLGL para caminos rectos
Cuando el vehículo se encuentra en la vecindad de la trayectoria a seguir, el valor del ángulo ϱ es pequeño y se puede utilizar la aproximación lineal:
 (15)
(15)
De la Figura 5, teniendo en cuenta que ϱ 1 y ϱ 2 son pequeños, se puede concluir que (16 y (17)):
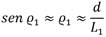 (16)
(16)
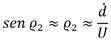 (17)
(17)
Combinando las ecuaciones anteriores con la (12) se llega a (18):
 (18)
(18)
El algoritmo NLGL, para pequeños valores de ϱ, se puede representar por la ecuación lineal (18), equivalente a un controlador PD, que actúa sobre el error perpendicular al camino. Como se puede apreciar en la ecuación (18), las ganancias proporcional y derivativa del controlador dependen del valor del módulo de la velocidad del vehículo (U) y de la distancia L 1 .
Linealización del esquema NLGL para caminos circulares.
La Figura 6 muestra un diagrama para el caso de seguimiento de camino circular. En este análisis ϱ 1 y ϱ2 se asumen pequeños, sin embargo, ϱ 3 no es necesariamente pequeño (19):
 (19)
(19)
Además, se puede notar que el ángulo ϱ 3 está asociado con un segmento local circular. La posición actual del vehículo queda definida por, R + d y θ, mientras que ψ indica la dirección de la velocidad ϱ 2 . es el ángulo que se forma entre la dirección de la velocidad y la línea tangente al camino circular. La relación entre los tres ángulos queda como se muestra a continuación (20):
 (20)
(20)
 entonces (21):
entonces (21):
 (21)
(21)
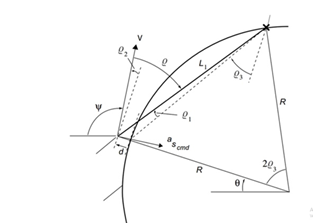
Figura 6 Descripción geométrica del algoritmo NLGL para su liberalización para una trayectoria circular
Además, teniendo en cuenta lo asumido en 19 y usando las relaciones geométricas vistas en la Figura 6 se tiene (22):
 (22)
(22)
a partir de esto se puede definir (ecuación 23):
 (23)
(23)
Asumiendo pequeñas variaciones para el ángulo ϱ 2 , la derivada de la posición del error queda expresada como (24):
 (24)
(24)
Teniendo en cuenta que, U es constante, por lo tanto (25):
 (25)
(25)
por lo que, usando las relaciones de las ecuaciones 21 y 25, la aceleración lateral queda expresada como:
 (26)
(26)
teniendo en cuenta la ecuación 19, se puede decir que:

que no es más que la aceleración centrípeta necesaria para seguir un circulo de radio R con velocidad U, de 26 obtenemos (27):
 (27)
(27)
De esta forma queda claro, de la ecuación 28, que  , en un camino circular, tiene dos componentes, la mencionada aceleración centrípeta, valor constante que hace que el vehículo siga la trayectoria circular de radio R, y un componente de corrección
, en un camino circular, tiene dos componentes, la mencionada aceleración centrípeta, valor constante que hace que el vehículo siga la trayectoria circular de radio R, y un componente de corrección  que obliga al vehículo a converger al camino circular cuando
que obliga al vehículo a converger al camino circular cuando 
 (28)
(28)
De la Figura 6, teniendo en cuenta la ecuación 19, se puede concluir que (29):
 (29)
(29)
Sustituyendo en 28, las ecuaciones 23, 24 y 29, se obtiene (30):
 (30)
(30)
a partir de esta ecuación se puede apreciar que para lograr que el vehículo siga un camino circular deseado el algoritmo genera un componente de aceleración centrípeta constante,  . El algoritmo, además, genera un componente PD determinado por la velocidad del vehículo, el radio de la trayectoria circular y la distancia L
1
que sirve para la corrección de las desviaciones d que existan en el seguimiento de la trayectoria deseada.
. El algoritmo, además, genera un componente PD determinado por la velocidad del vehículo, el radio de la trayectoria circular y la distancia L
1
que sirve para la corrección de las desviaciones d que existan en el seguimiento de la trayectoria deseada.
Bajo la condición de que la dinámica del lazo interno es despreciable, sustituyendo 30 en 27, obtenemos para la dinámica de lazo cerrado (ecuación 31):
 (31)
(31)
Es destacar que, comparando la aproximación lineal del algoritmo en el seguimiento de caminos rectos, ecuación 13, con los caminos circulares, ecuación 30, en la segunda se produce una disminución de la ganancia proporcional y la derivativa, motivado por el parámetro “c”, ecuación 23. Sobre esa base queda claro que, en el ajuste del controlador externo, en seguimiento de caminos circulares, se poseen dos parámetros de diseño: L 1 y R, teniendo en cuenta que valor del módulo de la velocidad del vehículo (U) es constante.
Análisis de estabilidad:
La estabilidad de la aproximación lineal del algoritmo en el seguimiento de camino curvos está condicionada por la relación entre L
1
y R, que determina en valor del parámetro “c”, ecuación 23, que a su vez afecta el cálculo de , ecuación 31.
En el caso de que L 1 = 2R, el sistema tendrá amortiguamiento cero. Para el caso en que L 1 > 2R c, se indefine.
La demostración de la estabilidad asintótica de la ley no lineal para el seguimiento de caminos circulares, considerando despreciable la dinámica del lazo interno, es desarrollada por Park [12]. En este trabajo se parte de lograr una representación del algoritmo en el espacio de estado. Dicho análisis es realzado en la condición de que L 1 = R/2.
Resultados y discusión
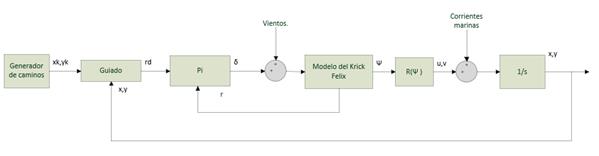
Teniendo en cuenta los elementos expuestos hasta el momento, en la Figura 7, se muestra el esquema propuesto en esta investigación. La ruta para seguir por el vehículo está conformada por una serie de puntos, también llamados Way points (WP), originados por el bloque generador de caminos. A partir de estos WP es generado el camino de Dubin, acorde al epígrafe 2.2, que debe seguir el vehículo. Este es entregado al bloque de guiado, como camino deseado a seguir. En dicho bloque de guiado es donde se encuentra implementado el algoritmo NLGL para caminos circulares, este da la referencia al lazo interno de control de velocidad r d , que cuenta con un PI para eliminar el efecto de la perturbación de viento [4]. A la salida del lazo interno se producen una serie de transformaciones cinemáticas que determinan la posición del vehículo en x y y, que se constituye en la salida del esquema.
Generación del camino
La trayectoria curva que se quiere seguir es la denominada caminos de Dubin, compuestos por tramos rectos y arcos de circunferencias. Las características de este tipo de camino y su generación se presentó en el sub epígrafe 2.2.
Condición de cambio de tramo:
Para lograr que el vehículo supere cada tramo de la ruta en su totalidad resulta necesario implementar una condición de cambio de tramo, mediante la que se comprueba si ya ha vencido el recorrido actual, para entonces pasar al siguiente. Una forma de hacerlo consiste en asociar un círculo de conmutación de radio R com a cada WP del camino.
 (32)
(32)
Al cumplirse la condición 33 se pasa de un tramo al siguiente, siendo conveniente seleccionar un valor de R com que este lo más próximo posible al punto de conmutación, con un valor aproximado a dos veces la longitud del vehículo. Como, en este caso, los caminos están constituidos por tramos rectos y arcos de circunferencia son considerados caminos mixtos. Por tanto, el radio del círculo de conmutación se escoge como: R com = R 1 .
La secuencia en que el vehículo realiza el guiado puede ser la siguiente. El primer tramo que enfrenta es un tramo recto, el que inicia en el primer WP y finaliza cuando el vehículo esté a una distancia del segundo WP de R com = R 1 . Una vez llegado a este punto el vehículo se encuentra sobre punto de conmutación y desde aquí comenzara un arco de circunferencia el que seguirá hasta que nuevamente vuelva a estar a una distancia R 1 del segundo WP. Para completar el camino en su totalidad, el vehiculó, debe mantenerse siguiendo este orden lo giro, hasta completar n − 1 tramos donde n es la cantidad de WP.
Seguimiento de caminos mediante simulación.
En la siguiente simulación se pretende evaluar el comportamiento del algoritmo en dos caminos curvos distintos. El esquema de la simulación esta acorde a la Figura 7.
El modelo no lineal descrito en el epígrafe 2.1 es utilizado en la simulación, con los valores reportados por [13]. El lazo interno se diseña garantizando que su velocidad sea mayor que el lazo externo. En este lazo es necesario el uso de una acción integral, para garantizar cero error de seguimiento en presencia de perturbaciones de viento [4]. El modelo de las perturbaciones de viento y corriente se toma de [4]. En el lazo externo se implementa la estrategia NLGL, descrita en el epígrafe 4. La cinemática de lazo externo garantiza que se elimine el efecto de la perturbación de corriente, a pesar de que el algoritmo NLGL se puede aproximar a un PD. El como parámetro de ajuste se escoge L 1 = 2.3m. Los radios de los arcos de circunferencia a seguir se toman como 2L 1 < R. Para todas las simulaciones, los valores de las perturbaciones serán: velocidad y ángulo de las corrientes, V c = 0.2m/s y c = 90 0 , respectivamente; mientras que velocidad y ángulo del viento, será, respectivamente, V w = 0.2m/s y βw = 90 0 .
Para el caso 1, con P 0 = (0,0), los puntos del camino son los que se muestran en la Tabla 2:
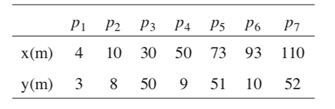
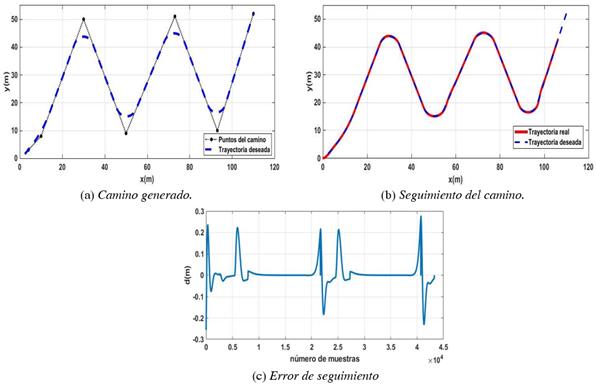
En la Figura 8 (a) se muestra el camino generado entre los WP de la tabla 2, combinando caminos rectos y curvos. La conmutación entre lo distintos tipos de tramo se realiza a una distancia de 10 m, que coincide con el valor de R 1 . Como se observa en la Figura 8 (b), el bote robótico Krick Felix es capaz de seguir satisfactoriamente este tipo de camino mixto, convergiendo rápidamente a la trayectoria deseada, a pesar de las perturbaciones. El comportamiento del error se muestra en la Figura 8 (c) , se puede apreciar como el error tiende a cero, tanto en los tramos curvos como rectos, los pequeños picos de error ocurren cuando el vehiculó esta en transición entren los tramos curvos y rectos.
Los puntos del camino para el caso 2, con P 0 = (0,0), se muestran en la Tabla 3:

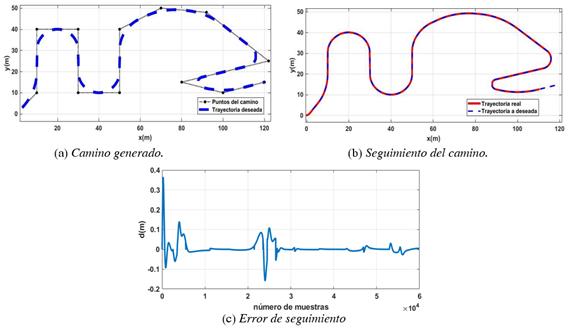
En la Figura 9 (a) se muestra el nuevo camino generado para el vehículo, la conmutación entre los distintos tipos de tramos se mantiene a una distancia de 10 m. Para este segundo caso, tal y como se ve en la Figura 9 (b), la dificultad del camino es mayor, pero de igual modo el vehículo es capaz de seguir satisfactoriamente la trayectoria. La curvatura en algunos tramos es más pronunciada lo que hace se modifique ligeramente el comportamiento del error aunque sigue tendiendo a cero como se puede observar en la Figura 9 (c).
Conclusiones
Como resultado principal de la investigación se propone un esquema de guiado para el seguimiento de caminos mixtos basado en el algoritmo NLGL, para el bote robótico Krick Felix. Se ha comprobado la factibilidad de este esquema incluso en presencia de perturbaciones medioambientales como: el viento y las corrientes marinas. El esquema propuesto está compuesto por un generador de caminos, el que le proporciona el camino a seguir a un esquema de guiado, con una estructura en cascada, con un lazo interno de velocidad angular de guiada y un lazo externo donde esta implementado el algoritmo NLGL. Las características de este esquema propuesto permiten eliminar el efecto de las perturbaciones a la vez que sigue el camino deseado. A partir de las simulaciones realizadas se comprobó que el esquema de guiado basado en el algoritmo NLGL garantiza convergencia y precisión durante el seguimiento de caminos curvos con el bote robótico Krick Felix en presencia de perturbaciones.

