










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería Mecánica
versión On-line ISSN 1815-5944
Ingeniería Mecánica vol.16 no.1 La Habana ene.-abr. 2013
ARTÍCULO ORIGINAL
Correlación automatizada de parámetros geométricos mediante contornos de bloqueo en engranajes cilíndricos con contacto exterior
Automatic correlation of geometric parameters by means of blocking contours in spur and helical external gear
Robert Hernández-Ortega, César A. Chagoyén-Méndez, Feliberto Fernández-Castañeda, Jorge Laureano Moya-Rodríguez
Universidad Central Marta Abreu de Las Villas. Facultad de Ingeniería Mecánica. Santa Clara. Cuba.
RESUMEN
Este trabajo tuvo como objetivo obtener un procedimiento, que al implementarse en un software para el diseño de transmisiones por engranajes cilíndricos con contacto exterior, correlacione automáticamente los parámetros geométricos mediante los contornos de bloqueo y así facilitar el trabajo del diseñador de engranajes. Para ello, se transformaron las expresiones matemáticas que definen las limitaciones geométricas para que puedan ser utilizadas en un programa que construya el contorno de bloqueo sin la intervención del diseñador. Se estableció además la secuencia en que estas deben ser calculadas. El procedimiento obtenido se implementó en un programa de computación obteniéndose una velocidad de ejecución de 1 segundo aproximadamente. De esta forma se logró la correlación automática de los parámetros geométricos y un contorno de bloqueo que muestra el conjunto de valores de los coeficientes de corrección de las ruedas que pueden ser utilizados, construidos sin interacción con el diseñador.
Palabras claves: contorno de bloqueo, engranajes, parámetros geométricos.
ABSTRACT
The aim of this work was to obtain a procedure, that when being implemented in the design software of spur and helical external gears, correlate the geometric parameters automatically by means of the blocking contours making easier the designer's work. The mathematical expressions that define the geometric limitations were transformed so that they can be used in a program that it builds the blocking contour without the designer's intervention. Besides that it was settled down the sequence they should be calculated. The procedure was implemented in a calculation program obtaining an execution speed about 1 second. This way it was achieved the automatic correlation of the geometric parameters and a blocking contour construction without the designer's intervention that it shows the values of the addendum modification coefficients of the wheels that can be used.
Key words: blocking contour, spur and helical gear, geometric parameters.
INTRODUCCIÓN
Las transmisiones por engranajes cilíndricos con contacto exterior constituyen uno de los elementos de máquinas más difundidos en las construcciones mecánicas. Se utilizan en diversos campos de aplicación en las formas constructivas y tamaños más variados. En la actualidad el diseño de estas transmisiones se realiza de forma automatizada, por medio de software profesionales que comprueban la validez de los parámetros geométricos introducidos por medio de las ecuaciones del cálculo geométrico verificando también las limitaciones geométricas: socavado, interferencia, factor de recubrimiento, y aguzamiento de los dientes del piñón y de la rueda. En este sentido, si no hay correspondencia entre los parámetros geométricos, o no se cumple alguna de las limitaciones mencionadas, el software muestra un mensaje de error donde se recomienda una posible solución. A menudo sucede que la solución propuesta provoca otro error diferente. Es decir, la tarea se convierte en "prueba y error" o a obtener por otra vía parámetros geométricos que correspondan a una transmisión válida. Este problema se puede solucionar si se correlacionan los parámetros geométricos por medio de los contornos de bloqueo [1] desarrollados por ingenieros rusos a lo largo de los últimos 50 años.
Los contornos de bloqueo muestran, en un sistema de coordenadas definido por los coeficientes de corrección del piñón (x1) y de la rueda (x2), el conjunto de valores de los coeficientes de corrección (x1: x2) que pueden ser utilizados para realizar la síntesis de la transmisión cumpliendo las restricciones geométricas anteriormente mencionadas. Los principios fundamentales para su construcción fueron desarrollados por Bolotovski I. A., quien, junto con sus colaboradores, obtuvo, de forma manual, un grupo importante de ellos, para un número representativo de combinaciones de números de dientes y parámetros de la herramienta normalizada: coeficiente de holgura radial, c* = 0,25 coeficiente de altura de cabeza, ha*= 1 radio de redondeo, ρ*=0,4 ángulo de presión; α=20º [1, 2].
La evolución lógica del método de los contornos de bloqueo es su automatización. En este sentido se reportan algunos programas que con un mayor o menor grado de elaboración posibilitan la obtención del contorno de bloqueo para cualquier combinación de parámetros de la herramienta y números de dientes. Así, Mekhalfa y otros realizan un análisis matemático de la ecuación que define la condición de interferencia para obtener una expresión que se pueda utilizar en la construcción de las curvas de esta limitación en un programa de computación. Este trabajo se limita a obtener la zona de existencia de la transmisión solamente desde el punto de vista de la interferencia sin analizar el resto de las limitaciones geométricas [3]. Sholenikov y Nikishin obtienen un programa, que entre otras posibilidades no relacionadas con este trabajo, permite obtener el contorno de bloqueo para cualquier combinación de números de dientes. Sin embargo, aquí no se explica el procedimiento matemático utilizado por lo que no es posible evaluar las posibilidades reales del programa. Además, tampoco se explica la forma de interactuar con el mismo para obtener el contorno [4]. Nenov y otros hacen referencia a la obtención de forma automatizada de contornos de bloqueo en dos y tres dimensiones. Aquí, nuevamente no se dan detalles del funcionamiento del programa ni del procedimiento matemático para la obtención del mismo [5].
Dos programas para la obtención automatizada de los contornos de bloqueo con un grado de elaboración notablemente superior son los programas "BCD" destinado a engranajes interiores de la Universidad de Ostrava, República Checa [6] y el programa Contour para engranajes cilíndricos con contacto exterior. Este último es un sistema CAD (Computer Aided Design) con una interfaz gráfica que permite obtener el contorno como resultado de la introducción sucesiva en el sistema de coordenadas ![]() de las curvas que lo limitan desde el punto de vista geométrico. Aquí se muestran las transformaciones matemáticas realizadas a las expresiones que definen las limitaciones geométricas para que sea posible su introducción en el área gráfica. Sin embargo, la correlación entre los parámetros geométricos se realiza de forma interactiva con el diseñador y no de forma automática. Así, por ejemplo, para obtener los valores de distancia mínima entre centros y máxima donde está definida la transmisión, el diseñador tiene que introducir en el área gráfica las líneas que representan estas transmisiones [7, 8].
de las curvas que lo limitan desde el punto de vista geométrico. Aquí se muestran las transformaciones matemáticas realizadas a las expresiones que definen las limitaciones geométricas para que sea posible su introducción en el área gráfica. Sin embargo, la correlación entre los parámetros geométricos se realiza de forma interactiva con el diseñador y no de forma automática. Así, por ejemplo, para obtener los valores de distancia mínima entre centros y máxima donde está definida la transmisión, el diseñador tiene que introducir en el área gráfica las líneas que representan estas transmisiones [7, 8].
Otra aplicación actual de los contornos de bloqueo se reporta en la síntesis de transmisiones por engranajes con dientes asimétricos. En este caso el contorno de bloqueo es el área común que se obtiene al superponer los contornos de bloqueo de ambos perfiles [9].
Un enfoque avanzado al diseño óptimo de engranajes proponen Veniamin, Kapelevich y Tkachev que consiste en la combinación del Diseño Directo de Engranajes (Direct Gear Design) y el Método de los Contornos de Bloqueo Dinámicos (Contour). En el Diseño Directo de Engranajes, a diferencia del diseño tradicional, se definen primero los parámetros de las ruedas y después los de la herramienta de corte. De esta forma es posible optimizar la transición del perfil del pie del diente para obtener un mínimo de concentración de tensiones garantizando además un mínimo de holgura radial y la ausencia de interferencia. Se balancea además la resistencia a la flexión de las ruedas modificando el espesor de los dientes. Con el programa Contour se asignan los coeficientes de corrección una vez definidos los parámetros de la herramienta [10,11].
En general se puede resumir que la automatización actual de los contornos de bloqueo se realiza de forma interactiva lo que significa que para obtener los valores límites de los coeficientes de corrección tiene que haber intervención de la persona que diseña mientras que en este trabajo se pretende que estos valores se obtengan de forma automática, sin la intervención del diseñador, y se muestren solamente cuando este lo requiera.
Este trabajo tiene como objetivo obtener un procedimiento, que al implementarse en un software para el diseño de las transmisiones por engranajes cilíndricos con contacto exterior, correlacione automáticamente los parámetros geométricos mediante los contornos de bloqueo para facilitar el trabajo del diseñador de engranajes. Esto se logra a partir del análisis matemático de las ecuaciones que definen cada limitación geométrica.
MATERIALES Y MÉTODOS
Se denomina contorno de bloqueo al conjunto de curvas en el sistema de coordenadas , que limitan la zona de valores válidos de los coeficientes de corrección (área sombreada en la Fig. 1) para una transmisión con números de dientes del piñón z1 y de la rueda z2. En la figura 1 se muestra un ejemplo de estos contornos [1,2].
Se puede apreciar que una transmisión con un valor de corrección sumaria (xs) dado se representa en este sistema como una recta inclinada a 45 grados (figura 1, rectas 9, 10 y 11) definida por la ecuación 1 [1].
La recta 9, que tiene al menos un punto perteneciente al contorno, representa la transmisión con la corrección sumaria máxima posible (xsmáximo) o lo que es lo mismo, con la mayor distancia (awmáximo_m1) entre centros posible para un valor del módulo m=1 y la recta 10 con la menor (xsmáximo y awmáximo_m1) [1]
Resulta entonces evidente que una vez definidos los números de dientes la relación entre el módulo, la distancia entre centros (aw) y el ángulo de inclinación del diente en el diámetro primitivo (β) se restringe notablemente, y con la posterior introducción de uno de estos 3 parámetros los dos restantes quedan limitados a un rango de valores notablemente reducido. Al automatizar la correlación geométrica el programa debe limitar la introducción de estos últimos parámetros a ese rango. Es decir, luego de definir los valores de z1, z2, y β se tiene que cumplir la condición:
Para obtener los valores de (xsmáximo y awmáximo_m1) se propone construir el contorno desde su interior lo cual consiste en asignar un valor de corrección sumaria y determinar los valores de x1 límites para cada tipo de restricción. El intervalo de x2 valido para el espesor del diente, el socavado y el factor de recubrimiento está definido por el menor de los valores límites máximos (x1máximo) y el mayor de los valores límites mínimos (x1mínimo). Posteriormente se determinan los fragmentos de este intervalo que son afectados por la condición de interferencia. Al realizar este cálculo para un número suficiente de valores de corrección sumaria se obtiene, entonces, el contorno buscado, construido desde su interior y con él los valores de corrección sumaria mínima y máxima. Para materializar correctamente esta idea se necesita establecer una secuencia para el cálculo de los valores límites de x1 que funcione con una velocidad adecuada.
Para determinar los intervalos de x1 válidos se consideran conocidos los siguientes datos: ángulo de presión en el plano frontal en el diámetro primitivo ( αwt ), z1, z2, β, coeficiente de recubrimiento mínimo (εαmínimo) espesor mínimo del diente en el diámetro exterior, del piñon (Sa1mínimo) , y de la rueda (Sa2mínimo) y los parámetros de la herramienta: c*, ha*, ρ*, α. Se asume además el valor del módulo igual a 1 (m=1).
Paso 1. Se determinan los valores de x1 que establecen el intervalo de definición de las ecuaciones de las limitaciones geométricas:
Donde:
do1,2: Diámetro de las circunferencias base. Aquí y en lo adelante el número 1 se refiere al piñón y el 2 a la rueda.
αt: Ángulo de presión en el plano frontal.
ha: Coeficiente de altura de cabeza del diente.
Las ecuaciones 4 y 5 se han obtenido del análisis de las ecuaciones que definen la interferencia, el socavado y el factor de recubrimiento. El resultado obtenido por ellas físicamente representa el valor de x1 que hace que el diámetro exterior de las ruedas sea igual al diámetro de la circunferencia base, lo que evidentemente es un absurdo, aunque desde el punto de vista matemático es necesario ya que si este intervalo no existe se producen errores durante el resto del cálculo.
Se asume entonces: ![]()
Paso 2. Se determinan los valores de x1 límites para el socavado.
El valor mínimo de x1 que garantiza la ausencia de socavado es precisamente el que limita el socavado en el piñón:
![]()
Al sustituir en la ecuación 1 el valor mínimo del coeficiente de corrección x2 que limita el socavado en la rueda se obtiene el coeficiente de corrección máximo del piñón x1:
![]()
Paso 3. Se determinan los valores de x1 límites para el factor de recubrimiento.
La norma ISO 6336 [12] prevé el cálculo del factor de recubrimiento cuando este está limitado por los diámetros exteriores, por los diámetros de inicio del perfil evolvente, y por el diámetro de inicio del perfil evolvente y el diámetro exterior en cada una de las ruedas [12]. No se tiene evidencia de la construcción del contorno de bloqueo teniendo en cuenta todos estos tipos de coeficientes de recubrimiento, lo que es lógico, ya que, como se ha dicho, el contorno, hasta ahora, siempre se ha obtenido de forma interactiva, o sea, el diseñador puede ver las zonas de valores de x1 y x2 donde la transmisión existe. Cuando para la construcción del contorno se tiene en cuenta solamente el factor de recubrimiento limitado por los diámetros exteriores, como ha sido hasta ahora, pueden aparecer pequeñas zonas de falsa existencia de la transmisión. Si se tienen en cuenta todos estos factores estas zonas desaparecen y se obtiene un contorno más limpio y más exacto. Esta es una diferencia importante y necesaria de este trabajo en comparación con todos los revisados en la bibliografía ya que se quiere que la correlación entre los parámetros geométricos se realice sin la intervención del diseñador.
A continuación se muestra el cálculo de los coeficientes de corrección límites cuando el factor de recubrimiento está limitado por los diámetros exteriores.
Se calcula el valor de x1εαmáximo que corresponde al valor máximo del factor de recubrimiento por una de las ecuaciones 10 u 11 según sea el caso.
Se calcula el valor máximo del factor de recubrimiento ![]() y se compara con εαmínimo, si resulta menor, significa que no es posible obtener el recubrimiento mínimo de la transmisión para ningún valor de x1 y se interrumpe el calculo. Si no es así se calculan los valores límites para el factor de recubrimiento por las ecuaciones:
y se compara con εαmínimo, si resulta menor, significa que no es posible obtener el recubrimiento mínimo de la transmisión para ningún valor de x1 y se interrumpe el calculo. Si no es así se calculan los valores límites para el factor de recubrimiento por las ecuaciones:

Donde A1, A2 y Bo son coeficientes que se obtienen de la agrupación de términos y se calculan por las ecuaciones 14, 15 y 16:
Las ecuaciones 10 y 11 se han obtenido luego de calcular las raíces de la primera derivada de la ecuación que permite el cálculo del factor de recubrimiento limitado por los diámetros exteriores expresándola en función de x1. Las ecuaciones 12 y 13 son las raíces de la ecuación para el cálculo del factor de recubrimiento expresada en función de x1 igualándola a εαmínimo de manera similar se calculan los coeficientes x1 límites para cuando la limitación es por el diámetro de inicio del perfil evolvente y el diámetro exterior en cada una de las ruedas. En el caso del factor de recubrimiento limitado por los diámetros de inicio del perfil evolvente solo se necesita calcular su valor y compararlo con εαmínimo ya que este no depende de x1.
Paso 4. Se determinan los valores de x1 límites para el espesor del diente en el diámetro exterior del piñón.
Primeramente se calculan los valores límites de x1 para el espesor del diente en el diámetro exterior del piñón ya que en este, esta limitación es más probable que en la rueda.
Hasta aquí el cálculo de los valores límites de x1 se ha realizado por expresiones analíticas lo que permite una velocidad de ejecución alta. En el caso del espesor del diente esto no es posible por lo que hay que recurrir al uso de métodos numéricos.
El valor de x1 Sa1máximo que corresponde al valor máximo del espesor del diente en el diámetro exterior del piñón se obtiene luego de n aproximaciones por la expresión:
Los puntos x1a y x1b definen el intervalo de x1 donde se encuentra la raíz buscada x1 Sa1máximo. Para la primera iteración se toman para x1a y x1b los valores obtenidos por las ecuaciones 4 y 5 respectivamente. Para las iteraciones sucesivas hay que determinar en qué intervalo (x1a, x1n) o (x1n, x1b) se encuentra la raíz buscada evaluando la función ![]() en estos puntos.
en estos puntos.
Se calcula el valor máximo del espesor del diente en el diámetro exterior del piñón (Sa1máximo) por la ecuación 18 para un valor de x1 = x1 Sa1máximo y se compara con x1 Sa1mínimo. Si resulta menor significa que no es posible obtener el espesor mínimo para ningún valor de x1. Si no es así, se obtiene por la ecuación 19 luego de n iteraciones el valor mínimo de x1 que garantiza el espesor mínimo del diente en el diámetro exterior del piñón x1mínimoSa1.
En la primera iteración se utiliza para x1a el valor de x1 obtenido por la ecuación 4 y para x1b el valor obtenido x1 Sa1máximo. En iteraciones sucesivas hay que determinar en qué intervalo (x1a, x1n) o (x1n, x1b) se encuentra la raíz buscada evaluando la ecuación 18 en estos puntos.
El límite máximo x1máximoSa1 se obtiene por la ecuación 20 luego de n iteraciones:

Las ecuaciones 17 y 19 se han obtenido al aplicar la modificación propuesta por Hamming al método de la falsa posición [13]. En estos casos no es posible utilizar el método de Newton ya que durante el proceso de iteración el valor de x1n cae fuera del intervalo de definición (3). El método de la bisección no logra una velocidad de ejecución satisfactoria. Para obtener el límite máximo x1máximoSa1 (ecuación 20) si se utiliza el método de Newton.
Paso 5. Se determinan los valores de x1 límites para el espesor del diente en el diámetro exterior de la rueda.
Estos límites se calculan de la misma forma que para el espesor del diente en el diámetro exterior del piñón. La única diferencia es que se utiliza para x1máximoSa2 la modificación propuesta por Hamming al método de la falsa posición y para el límite mínimo x1mínimoSa2 el método de Newton.
Al concluir el cálculo en los pasos 2, 3, 4 y 5 se compara el valor límite mínimo obtenido con x1mínimo y se toma para este ultimo el mayor. Después se compara el valor límite máximo obtenido con x1máximo y se toma para este ultimo el menor. Seguidamente se comprueba la existencia o no del intervalo valido de x1 comparando x1mínimo con x1máximo. De esta manera al concluir el paso 4 se ha obtenido el intervalo:
El intervalo 21 es continuo, es decir, todos los valores de x1 que se encuentran dentro de él cumplen con las limitaciones geométricas: socavado, factor de recubrimiento y espesor del diente en el diámetro exterior de las ruedas.
Paso 6. Se determina la afectación del intervalo 21 por la condición de interferencia.
Del análisis matemático de la ecuación de la condición de interferencia [1] se obtienen las ecuaciones que permiten el cálculo de forma analítica de los dos intervalos de x1 donde existe interferencia: del piñón sobre la rueda y de la rueda sobre el piñón.
Para la interferencia del diámetro exterior del piñón con el pie del diente de la rueda:
Donde E1, D y Eo son coeficientes que se obtienen de la agrupación de términos y se calculan por las ecuaciones siguientes:
Para la interferencia del diámetro exterior de la rueda con el pie del diente del piñón:
Donde F1, G y Fo son coeficientes que se obtienen de la agrupación de términos y se calculan por las ecuaciones siguientes:
Ahora solo resta concebir todas las formas en que el intervalo 21 puede ser afectado por la condición de interferencia. Estas afectaciones pueden ser desde ninguna hasta ser dividido en tres partes de x1 válidas. En la figura 2 se muestra la proyección en el eje x1 de un caso general de una transmisión con una corrección sumaria determinada. Con línea continua se muestra la zona de valores validos de x1 y con línea discontinua las que no cumplen alguna de las limitaciones.
Para recorrer todo el intervalo de valores posibles del ángulo de presión en el plano frontal se comienza en αwt = 1º y se va aumentando en un grado hasta alcanzar αwt = 45º por encima del cual es improbable que exista un contorno valido [1]. Con cada valor de αwt se calcula la corrección sumaria y se realizan los pasos anteriores determinando los intervalos validos de x1. Cuando al menos un intervalo valido aparece por primera vez se obtiene el valor de αwtmínimo, y cuando este desaparece se obtiene αwtmáximo. Es necesario prever la posibilidad de que exista más de un intervalo valido de αwt o sea el contorno puede quedar dividido en dos partes de αwt separadas, entre las cuales la transmisión no puede existir. Para obtener los valores de αwtmínimo y αwtmáximo con mayor precisión se utiliza el método de la bisección.
RESULTADOS Y DISCUSIÓN
Para comprobar la velocidad de ejecución del procedimiento este se programó y se ejecutó para los parámetros de la herramienta normalizada: c* = 0,25, ha* = 1, ρ*=0,4 y α = 20º variando los números de dientes de las ruedas entre 10 y 500. En todos los casos ese tiempo fue de aproximadamente 1 segundo.
En la figura 3 se muestra el contorno de bloqueo obtenido para los parámetros geométricos siguientes:
![]()
Garantizando además la ausencia de socavado e interferencia y los datos:
![]()
Se observa que el programa devuelve el módulo 4 que se obtiene al buscar los valores normalizados del módulo que cumplen con la condición 2. Se muestran también los siguientes resultados:
![]()
La línea inclinada que se muestra en el área gráfica corresponde a x3 = 0,231 y aw = 370. El intervalo valido de x1 y x2 de esta transmisión ha sido dividido en tres partes (en color negro en la Fig. 3) y son los siguientes:
De x1 = 2,241 y x2 = 2,472 limitado por el factor de recubrimiento hasta x1 = -1,155 y x2 = 1,386 limitado por la interferencia.
De x1 = -0,845 y x2 = 1,076 limitado por la interferencia hasta x1 = 1,059 y x2 = -0,828 limitado por la interferencia.
De x1 = 1,043 y x2 = -1,172 limitado por la interferencia hasta x1 = 2,089 y x2 = -1,858 limitado por el espesor mínimo en el diámetro exterior del diente del piñón.
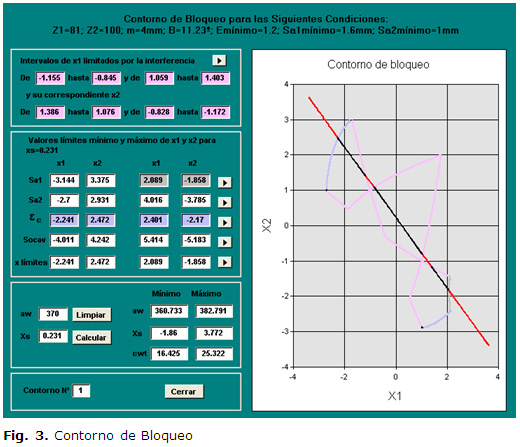
Se debe señalar que la recta no forma exactamente un ángulo de 45 grados porque las escalas de los ejes de coordenadas se han seleccionado de forma automática para que el contorno ocupe toda el área gráfica.
CONCLUSIONES
A diferencia de los contornos que se obtienen con los programas referenciados en la bibliografía "Contour" [7, 8] y "BCD" [6], con el procedimiento obtenido se logra un contorno de bloqueo construido sin interacción con el diseñador, lo que posibilita la correlación automatizada de los parámetros geométricos de las transmisiones por engranajes cilíndricos con contacto exterior. Al no existir correspondencia entre los parámetros geométricos introducidos la posibilidad de ver el contorno permite determinar toda la zona de existencia de la transmisión sin necesidad de prueba y error.
REFERENCIAS
1. Bolotovski, I. A., Bezrukov, O. F. y Vacilieva, B. I. Cálculo Geométrico de Transmisiones de Perfil Evolvente por Engranajes y por Tornillo Sin Fin. 2da Edición, (Original en Ruso), Moscú: Construcción de Maquinarias 1986, p. 28-138. 444 p. ISBN 5-0689717-A.
2. GOST. Transmisiones por Engranajes Cilíndricos de Perfil Evolvente con Contacto Exterior. Cálculo Geométrico. GOST 16532-70, URSS:GOST. 1970.
3. Mekhalfa, A., Hadjadj, y E. Kallouche, A. "Cylindrical Teeth's Gear in Devellopante of Circle" Journal of Engineering and Applied Sciences. 2007, vol. 2, nº 1, p. 121-124 [Consultado el: 3 de Mayo 2012]. Disponible en: http://medwelljournals.com/abstract/?doi=jeasci.2007.121.124. ISSN 1818-7803
4. Sholeninov, V. E. y Hikishin, S. M. "Síntesis de Engranajes Cilíndricos con ayuda de la computadora". (Original en Ruso) Vestnik D.G.M.A. 2008, vol. 14, nº 3E, p. 187-191. [Consultado el: 3 de Mayo 2012]. Disponible en: http://opm.donntu.edu.ua/files/sbornik/dm2008.pdf. ISSN 1995-4794
5. Nenov, P., Ronkova, V., Angelova, E. et al. "Almanac of Information Materials, 3d Images, Animations and other Visualizations as an Aid in Studying Machine Elements" En: The 7th International Conference Research and Development of Mechanical Elements and Systems, Zlatibor, Serbia. 2011, p.119-126 [Consultado el: 3 de Mayo 2012]. Disponible en: http://phdproject.uni-ruse.bg/files/article/paper-IRMES2011-BGRUSE.pdf. ISBN 978-86-6055-012-7
6. Nemcek, M. "Design of a non Standard Internal Gear Pair". Transactions of the VSB-Technical University of Ostrava. 2007, vol LII, nº 1, p. 141-145 [Consultado el: 3 de Mayo 2012]. Disponible en: http://transactions.fs.vsb.cz/2007-1/1541.pdf. ISSN 1210-0471
7. Goldfarb, V. I. y Tkachev, A. A. "Optimization Approach to Computer-Aided Design of Spur and Helical Gears" En: 13th World Congress in Mechanism and Machine Science, Guanajuato, México. 2011, p.1-6 [Consultado el 3 de Mayo 2012]. Disponible en: http://somim.org.mx/conference_proceedings/area.html. ISBN 978-607-441-131-7
8. Goldfarb, V. I. y Tkachev, A. A. "New Approach to Computerized Design of Spur and Helical Gears". Gear Technology. 2005, vol. 22, nº 1, p. 27-32. [Consultado el: 22 de Mayo 2012]. Disponible en: http://www.geartechnology.com/issues/0105x/goldfarb.pdf. ISSN 0743-6858
9. Simeonov, S. y Tsvetanov, G. "Practical Implementation and Optimization of Evolvent Cylindrical Toothed Gears with Asymmetric Tooth Profile". Machines Technologies Materials. 2011, vol. 5, nº 6, p. 41-44. [Consultado el: 22 de Mayo 2012]. Disponible en: http://mech-ing.com/journal/Archive/2011/6/174_Simeonov_Tsvetanov_eng.pdf. ISSN 1313 -0226
10. Veniamin, I. G. Kapelevich, A. L. y Tkachev, A. A. "An Advanced Approach to Optimal Gear Design". Gear Solution. 2008, vol. 6, nº 65, p. 40-53. [Consultado el: 3 de Mayo 2012]. Disponible en: http://www.gearsolutions.com/archives/index.php?month=8&year=2008. ISSN 1933-7507
11. Kapelevich, A. L. y Shekhtman, Y. "Area of Existence of Involute Gears". Gear Technology. 2010, vol. 27, nº 1, p. 64-69. [Consultado el 3 de Mayo 2012]. Disponible en: http://www.geartechnology.com/issues/0110x/kapelevich.pdf. ISSN 0743-6858
12. International Organization for Standardization. Calculation of load capacity of spur and helical gears-Part 2: Calculation of surface durability (pitting). ISO 6336-2, Geneva. Switzerland: Edited by ISO. 2008.
13. Burden, R. L. y Faires, J. D. Análisis Numérico. 7da Edición. Méjico: Thomson Learning. 2002, p. 55-65. 831 p. ISBN 970-686-134-3
Recibido: 6 de julio de 2012.
Aceptado: 12 de noviembre de 2012.
Robert Hernández-Ortega. Universidad Central Marta Abreu de Las Villas. Facultad de Ingeniería Mecánica. Santa Clara. Cuba.
Correo electrónico: robertho@uclv.edu.cu

{kind=link}