










 Custom services
Custom services
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroduction
The use of vibrational parameters of machines for technical diagnosis is well known. This technique is mainly used in rotational machines, and is aimed essentially to evaluation of rolling bearings, medium and large speed rotors balancing, and for the identification of assembly and set-up of different machines [1-3] A large amount of literature is available, together with software and instrumentation.
In relation with alternative machines like IC engines, compressors and alike, the use of vibrations for diagnosis have not found the same level. This is due to a different dynamic; simpler in rotating machinery. In addition, with the introduction of electric motor substituting the vapor machines, the amount of gears, wheels, bearings dramatically increased, and the attention for the diagnosis was focused for a long time in machines with rotating elements.
Reality shows a relatively small amount of technical literature about vibrational diagnosis in alternative machines respect to rotational machines, and the same applies to software, standards, and procedures. Nevertheless, this does not mean nothing have been done. Since the 70´s only some researchers have been reported in USA and the former Soviet Union [4-12]. These publications appears had had a little dissemination. Awell-known company on the subject of noise and vibrations offered his first diagnostic software for alternative machines only at the beginning of 90´s, after several versions of another software only for rotating machinery.
Vibroaccoustic diagnostic of alternative machines
Firsts reports on the subject tried to apply in alternative machines the same tools and procedures applied to rotating machines, but in general failed because a completely different dynamic. Therefore, it is normal to find in rotating machines forces with variable direction and constant value (for example, unbalanced forces). In alternative machines, besides the already mentioned, there are several forces of variable magnitude and direction, together with impact forces. Because of this, vibrations sources and its effects are different, and in general cannot be treated only with techniques usually employed in rotating machines.
Rules for machine analysis should be established following the type of machine movement. In rotating machines, the frequency analysis using diagnostic frequencies based on main shaft speed is usual. The advances in electronics and computer, and new measurements instruments make these procedures a very powerful tool, along with the necessary knowledge.
The application of similar techniques to alternative machines find serious limitations. In the case of IC engines, the most studied machine in this group, exist a large number of synchronized and repeated mechanism [13]. The use of diagnostic frequencies based only in main shaft speed and its harmonics became almost useless, because the same frequency correspond to different vibration sources, reducing the identification property inherent to diagnostic parameter. Moreover, according the IC engines speed, frequencies of interest are in the low frequency zone, and are hard to separate in a spectrum. In addition, the cyclostationary character of these signals recommend the use of short time period for each measurement, and this is another difficulty when analogical instrumentation is used.
Some paper on carburetor IC engines aimed to lighten the influence of several variables on vibrations reveals [14-16] the following results.
For a SI 4 cylinders in-line engine was designed a factorial 32 experiment, table 1. The measurements were made before and after increasing clearance in a connecting rod-crank shaft bearing. The output variable was acceleration level in dB, in a place near to the altered clearance. The difference between measurements was validated using t Student, and results point to the most significant regime n = 1800 rpm; T = 49 N-m
In addition, the relation between variables is as follow, equation 1:
 (1)
(1)
LA = 80,27-2,3e-3 ·Mt
This means that dependence between vibration level and engine speed is stronger, compared with the engine load. Measurement system was analogical, with 1/3 octave filters. Similar experiment in CI engines show the same result.
In the vibration spectra for both engines, SI and CI (SI, spark ignition; CI, compression ignition) were observed peaks in the frequency range of 2 to 5 kHz,which according to traditional diagnostic frequencies have no relation with the defects created. The existence of these peaks in the high frequency zone, explain why for alternative machines, is not enough to consider diagnostic frequencies related with forces and moment which periodicity depend on crank shaft speed, another frequencies related with structural resonances are more important. This is because the impulsive character of some forces, like gas expansion and impact forces between surfaces in contact when the direction of normal force changes.
Vibroaccoustical diagnosis in IC engines must be addressed to the analysis of vibration in or near resonance frequencies, and for this reason, is necessary to know these values in advance.
At this point, can be made several conclusions:
The engine working regime influence on the effectiveness of diagnostic, that is, in order to diagnostic an IC engine in working conditions is necessary to control load and speed.
Crankshaft speed has a greatinfluence on the vibration level.
There is no preference for the vibration parameter to use. Neither vibration speed nor acceleration show similar result, in its proper frequency range.
Effectiveness of diagnosis using traditional diagnostic frequencies is limited for the coincidence of several defects in the same frequency.
A deeper understanding of engine dynamics of IC engine in partial regimes is necessary.
In order to increase the precision of diagnostic, it will be suitable a time selection of vibration signal before processing.
Further research using a cold regime in a 4-cylinders engine confirmed some of the above asseverations and additional from other authors, like the stout signal modulation of engine block measurement, speed engine-vibration level relation, etc.
Vibration sources in IC engines
Main sources of vibration in IC engines are [12, 14]:
Unevenness in torsional moment in crankshaft.
Inertia forces and inertia moment unbalanced in the slider-crank mechanism.
Impulsive character of gas forces into cylinder.
Impact forces in some pairs in slider-crank mechanism and other, ought to technological clearances and variable value of forces.
Cause (a) is more important in engines with few cylinders; cause (b) depends on engine layout. Causes (c) and (d) are unavoidable.
Gas force has a frequency content concentered in the low frequencies zone, from 0 to 2-3 Hz, and may excite some block natural frequencies. Impact forces arise also in valves mechanism, because of the necessary thermal clearance, in the fuel injector, between piston and cylinder, and in the crankshaft bearings.
Impact forces in crankshaft bearing are of paramount importance because its influence in engine life expectancy. For its study is necessary to determine slider-crank mechanism dynamic considering clearances in some of its pairs, which means an increment in mechanism degrees of freedom. This have been studied from different points of view, which includes the addition of a massless rigid element [6, 17]; considering elastic surfaces and add damping [18], using of moment exchange mechanics [19], etc. Result in the most of all cases are similar.
From all approaches studied, likely the most suited for IC engine in operation condition is the proposed in [6], which consider the possibility of contact loss and recuperation between surfaces in connecting rod and crankshaft bearing in a 4-cylinders engine, which can occur if gas force becomes, equation 2:
 (2)
(2)
Where:
m A |
-rotatory reduced mass |
m B |
-alternating reduced mass |
λ |
-relation between crankshaft radiusr and connecting rod lengthl |
w 1 |
-rotational crankshaft speed |
This can occurs in soma partial regime in SI, and in turbocharged CI engines, in positions closed to TDC (Top Dead Center) in expansion period. Ideal conditions would be a speed close to nominal combined with medium load, with more probability in a transient regime [5]. In support crankshaft bearings could arises impact charges depending on theregime andengine layout.
In all the papers cited, lubrication was not included. Its complex hydrodynamic character hinder the analysis of oil influence on dynamics of slider-crankshaft mechanism. It have been proved that metallic contact between surfaces depends of relation between load application time, oil viscosity and surfaces area [20], being more probable in low engine speed, low oil viscosity, bigger clearances and longer load application times. This could occurs in low or medium speed CI engines in a partial regime, around TDC in expansion period. The bearing and lubrication system design also influences.
Between piston and cylinder, impact forces can arise during expansion period, because of change in direction of normal force between both elements. This occurs near to TDC and BDC (Bottom Dead Center), or when inertia force equals to gas force. Further piston movement in this condition has not been totally cleared, and some different propositions have been made about the piston movement inside cylinder [9], which goes from contact only in the piston crown or piston lap in both piston sides, to free piston movement into cylinder, some authors considers the effect of both element deformations and joint lubrication. Incidence of this movement in vibration in cylinder zone in remarkable around frequencies from 1 kHz and is the result of both the gas force and interaction between piston and cylinder.
Vibrations in valve mechanism are clearly attributable to impact suffered by elements where a thermal clearance exist. As long as the clearance varies, vibration varies too.
Considering all above, it can be concluded that a direct relation exist between clearance value in kinematic pairs and vibration levels [9, 12, 14] and these vibrations can be used as diagnostic parameter for clearances, being a very useful tool for the determination of defects hard to evaluate through other methods.
Engine noise can be also used as a diagnostic parameter [16] and in fact, this is what in a subjective way do many skilled operators. The sound pressure level is the most extended for quantitative evaluation of noise, but this parameter is highly influenced by environmental conditions, its measurement requires to fulfill certain conditions. A very interesting perspective is the use of sound intensity, which is defined as a vector and is less affected by environment, besides; sound intensity allows to precise the noise source. Until now, its use has been restricted to health problems, but represents another tool more to consider.
Determination of engine natural frequencies
The existence of impulsive forces and all subjects pointed in the preceding paragraph, implies that when the engine is running, its natural frequencies are excited, which open the possibility of increasing efficiency of diagnostic if these frequencies are known.
There are different methods for the determination of natural frequencies in solids elements, which are divided in experimental and theoretical methods. Amid theoretical are model of concentrated rigid masses linked by elastic massless elements, which properties reflex the real dynamics relations in the object. A more accurate result is achieved with models based on the Finite Element Method. FEM [9, 21].
The theoretical determination of natural frequencies is not easy in objects with complex geometry, as is the case of engine block. On the other hand, experimental determination with a reliable precision requires a two-channel signal analyzer.
In the Applied Mechanics Department have some experience in both directions. In the theoretical determination have been used the software MSC/PAL 2, based in FEM, which allow to build a model and to obtain its Frequency Response Function (FRF), excited by a sinusoidal force of variable frequency. For a linear system, FRF is the representation of one variable against frequency. The frequencies where this variable reach a maximum are natural frequencies or resonance frequencies of the model. Other dynamics parameter can be obtained. Another way is the experimental, for this, is used the software SIPROS++, a virtual instrument which reproduces most of the functions of a commercial two channels analyzer. This virtual instrument has an Impact Hammer, also developed in the department, with this hammer is possible to excite a structure and obtain a FRF in a range until 5 KHz.
Theoretically, the FRF for a linear system is defined, figure 1, as [22]:
 (3)
(3)
Where:
H(f) |
Frequency Response Function |
B(f) |
Fourier Transform of the system output |
A(f) |
Fourier Transform of the system input |
h(τ) |
Impulse Response Function |
a(τ) |
Impulse Response Function of system input |
b(τ) |
Impulse Response Function of system output |

The FRF can be obtained through different procedures, differing fundamentally in the way the input signalis fed into the system, a(t). Input signal can be a sinusoidal signal with variable frequency and constant amplitude, a white noise or a short amount of energy, using an impact hammer. The last is very used because of its simplicity. Energy enter in a short period of time D, by a blow or impulse, figure 2. An impulse is defined as:
 (4)
(4)

The Fourier Transform of an impulse is:
 (5)
(5)
Graphically, figure 3
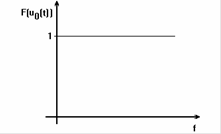
In others words, possess the same value for every frequency.
In practice, is impossible to reduce the impulse time to 0, so, its Fourier transform is slightly different, taking the shape in figure 4.
It is clear the theoretical and real Fourier transform of an impulse are quite different. To reduce this difference the real time duration of impulse should be as short as possible, and this is true both in experimental excitation and in real measurements. Inpractice: the less time of action of a force, the best consideration of this force as an impulsive force and the larger frequency range that can be excited in the system where the force is acting

In practice, an excitation is considered of impulsive character if its duration D is, at least, 10 times minor that the period of system natural oscillation.
According to this, it is necessary to know the engine block natural frequencies in the zone of crankshaft support bearing and near to cylinder, because in these zones act impulsive forces. Taking into account that the system response to this actions is measured in the external block surface, specifically is necessary to know the response between two points: excitation point and measurement point, which be the system input and output.
In this paper, this subject will be analyzed through the determination of diagnostic frequencies for the technicalstate of engine support bearings and piston-cylinder ensemble. The engine is a large V diesel engine 251-E from ALCO, 2400 HP and 1050 rpm, used in locomotives. Ought to the large dimensions of engine block, experimental set could be very complicated, and a theoretical approach is a very attractive alternative. The model should fulfill the system boundary conditions, this mean the restrictions to movement the engine really has. For this task, the FEM seems to be the most suited.
FEM method for the determination of engine block natural frequencies
In order to build a suitable model some simplifications are needed. These consist in preserve general dimensions and shapes, the most important details and sheet thickness. Bores which diameter minor to cylinder diameter will not be considered, neither protruding which length in not comparable to main block dimensions.
Several types of element are available for building the model, depending on the software. To have a bigger quantity of nodes allows building a model closer to reality. MSC/pal-2 offer 10 types of elements, the most used for this kind of object are plate type, triangular or rectangular [9]. This is in line with the modelling of welded sheets, used for most of manufacturers of large engines.
The model has an absolute reference system, with axes in the way more adequate. Nodes are placed in the junctures between block parts. Only the main dimensions of block components are considered. The last task is to establish the model movement restrictions, according to reality. To obtain a FRF in MSC/pal-2 is necessary to simulate a sinusoidal force with constant amplitude and discrete variable frequency in the node selected as system input. The effect is similar to a dynamic exciter fixed in the same point and fed with a signal generator, which produce a sinus with the same characteristics. General block dimensions and positions of measurements points in both model and engine are in figure 5 and figure 6.
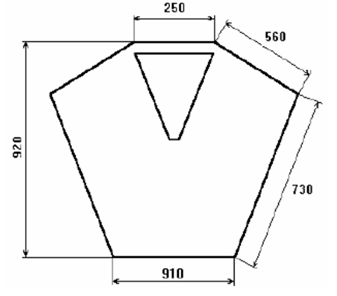

Cylinder are placed between upper side A and a sheet B parallel to A, which not touch the external lateral side C, and welded to another inner sheet and parallel to C, D. This sheet serves as support for crankshaft bearings PA, together with central line L and a series of reinforcements RPA. Among cylinders, and C and D the block has reinforcements RAL, which sustain the camshaft, one in each side. Bores in these sheets were not considered. The curved inner sheet F along the block do not reach extremes and pass behind the fuel collecting tube. Sheets E, G makes a tunnel all along, closed in the alternator side, by which air coming from compressor communicate with each cylinder. Sheet A has a bigger thickness near to cylinders, figure 7.
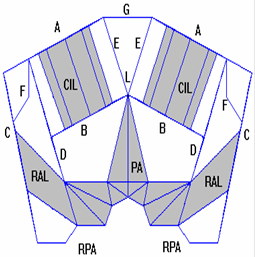
Table 2 Dimensions
| Sheet | Thickness, mm |
|---|---|
| A | 70 y 32 |
| B | 30 |
| C | 20 |
| D | 20 |
| E | 15 |
| F | 12.5 |
| G | 20 |
| RAL | 15 |
| CIL | 12.5 |
| RPA | 20 |
| PA | 10 |
| BASE | 40 |
| CLOSURES | 45 |
Sheet thickness are in table 2, the whole structure is made from welded sheets, except support point, which combines cast ant welded parts. The model do not consider some lateral apertures and a set of small holes for water connection. The FEM model file has 948 element, 666 quadrilateral type and 282 triangular type, placed in 798 nodes. A model view is in figure 8.
The dynamic analysis is based on superposition. The model is divides in 5 smaller systems, composed by two adjoining cylinders and the support bearing in between, in this way the original model split into 5 independent sub-models. Some nodes in both external faces and in certain portion of central support are activated. All movements are translation in z-axis; this is the measurement direction in the real block. Each sub-model takes 6 minutes for building.
The excitation force is applied in each sub-model, as a force in support bearing in z direction and two forces in the same direction in the upper edge of the two cylinders. Forces have an amplitude of 50 000 N and varies in frequency from 0 to 5 000 Hz, swapping the possible natural frequency range of the block.

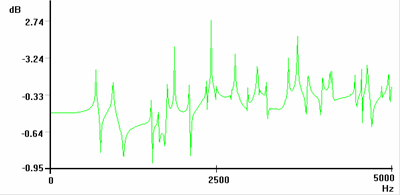
In this way, a large and complex system can be analyzed using smaller sections. Some results are in figure 9 and figure 10. Above are the FRF obtained using FEM, in dB vs frequency in Hz; and below are the ESD (Energy Spectral Density) Function of vibration acceleration vs. frequency, measured using SIPROS++.
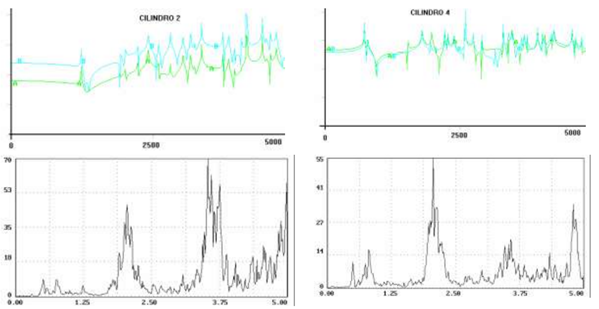
As can be seen, a great number of peaks exist in each graphics; this is because the system have an infinite number of degrees of freedom and natural frequencies associated. When the system is modeled both are reduced to a finite number with limited movement, and from this group only those which frequency is below the excitation upper frequency limit are activated. Taking into account that in each model are about 120 degrees of freedom, and not all natural frequencies correspond to a z displacement, this the shape the graphics should present.

The graphics have different unit in vertical axis, so, levels should not be compared, it is more important to compare the peaks frequencies. The working regime of the engine during measurements was position #6, corresponding to 1080 kW and 865 rpm. This position is selected as the most probable for the occurrence of impact forces in support bearing and connecting rod.
For node 536, in support bearing between cylinder 5 and 6, the FRF enhanced is, figure 11.
and the ESD in the coincident measurement point is in figure 12.
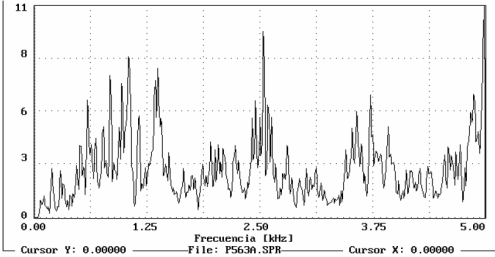
Comparing the graphics it is possible to establish if peaks in measurements are a consequence of forces applied in specific points or owes to another source. All measurements were made in a machine with more than 180 000 km, (about 60 % to general remanufacturing), so, some degree of wear should exist. Is easy to identify the similarity in peak distribution in both figures, regarding its frequencies.
From the analysis of results and comparing all measurements, the conclusion is that there is a relation between peaks in EED and FRF. The same happens in measurements made in an engine after general remanufacturing, but in this case, peaks level are lower and in some frequencies, there is no peak at all. All the results correspond to wear in each pair, of course different for a recently repaired machine and another with a great use.
Analysis of measurements
The mechanism of appearance of vibrations in crankshaft support points is explained from the engine firing order, which is 1-5-3-6-2-4 for each line, first in the left line L and after in the right line R. In every connecting rod bearing are two cylinders with the same number, which explodes with 60° between them. This is shown in table 3.
Table 3 Engine firing order
| 180 º | 180 º | 180 º | 180 º | |||||||||
| 1L | EXP | ESC | ADM | COM | ||||||||
| 1R | EXP | ESC | ADM | COM | ||||||||
| 2L | ADM | COM | EXP | ESC | ||||||||
| 2R | ESC | ADM | COM | EXP | ||||||||
| 3L | COM | EXP | ESC | ADM | ||||||||
| 3R | COM | EXP | ESC | ADM | ||||||||
| 4L | ESC | ADM | COM | EXP | ||||||||
| 4R | ESC | ADM | COM | EXP | ||||||||
| 5L | EXP | ESC | ADM | COM | ||||||||
| 5R | COM | EXP | ESC | ADM | ||||||||
| 6L | ADM | COM | EXP | ESC | ||||||||
| 6R | ADM | COM | EXP | ESC | ||||||||
For the position #6, n = 865 rpm, then the time for one revolution is 0,00156 sec. An angle of 60° is equivalent in time to 0,01156 sec. Time Tbetween explosions in a pair of cylinders at both sides from support bearing depends on the firing order y will be as follows:
Corresponding times in this engine speed are:
4T = 0,04624 sec. 6T = 0,06936 sec. 8T = 0,09248 sec.
Which correspond to 10,82, 14,43 and 21,6 Hz respectively.
These times are necessary to explain the measurements spectra. These spectra show a serial of peaks with a little separation between them, which increase its amplitude to s given frequency and then decrease. This behavior owe to the impulsive character of forces. These forces act in regular periods in the form of quasi-periodic series, like an impulse train, figure 13.
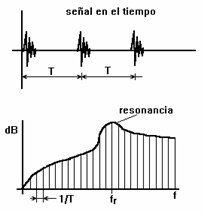
Because of these impulse trains, natural frequencies in the block are excited, producing a non-continuous spectrum, formed by peaks with a frequency separation that depends on the time T between impulses. The figure 13shows what will be expected in a 1 DOF system.
Spectrum of a working engine will not be exactly in the same shape, because T is not constant, the peaks will not be equally spaced, instead, should present a certain deformation. Besides, real system has much more than 1 DOF.
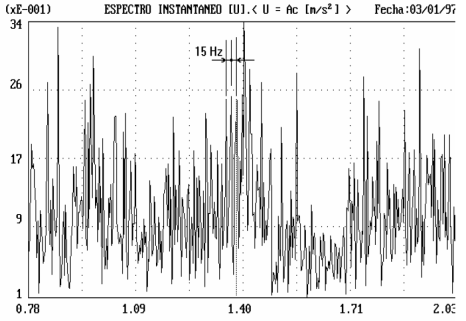
In figure 14 is shown a zoom of spectrum. The peaks pointed have a separation in frequency, which according to table 3 is 6T, or 14,43 Hz. There are other forces acting with other periods, that influence in the spectrum and which effects is hard to clear up, at least with the tools at hand. A similar situation show the rest of measurement in other engine points.
This detail can be useful to identify the vibration sources in a spectrum, beside the ESD; one can make a zoom of an instantaneous vibration spectrum for a better resolution.
To this moment, it can be said that natural frequencies are known and these frequencies are excited by forces in support bearings and cylinders. The correspondence between experimental and theoretical results are good enough, in the case of the engine with 180 000 km it is more clear, ought to higher forces, which produce higher vibrations levels.
Diagnostic frequencies in each case will be:
C1 -an increase in 2050 Hz, 2300 Hz, 3750 Hz and 4000 Hz, and in overall level
C2 - an increase in 2050 Hz, 3537 Hz and in overall level
C3 - an increase in 2100 Hz, 4575 Hz, 3700 Hz and in overall level
C4 - an increase in 812 Hz, 2062 Hz, 3562 Hz and in overall level
C5 - an increase in 625 Hz, 1900 Hz and in overall level
C6 - an increase in 687 Hz, 2100 Hz, 3750 Hz and in overall level
As a resume, increased values are in bands around 650, 900, 2000, 3450, 3650, 3750, 4000 Hz and in overall level. For the support bearings frequencies are:
PA 1|2 - an increase in 1025 Hz, 2335 Hz, and in overall level
PA 2|3 - an increase in 2162 Hz, 3300 Hz, and mild in overall level
PA 3|4 - an increase in 762 Hz, 1425 Hz, 2500 Hz and in overall level
PA 4|5 - an increase in 2100 Hz, and in overall level
PA 5|6 - an increase in 500 Hz, 1050 Hz, and in overall level
In general, the engine with more wear shows an increased background noise, proper to the character of sliding pairs. It is very clear that in some case, these frequencies are close to the cylinders frequencies. This will be a trouble when differentiation between sources is needed. Only further experimentation will solve this problem.
Conclusions
In alternative machines like IC engines, is necessary to use as diagnostic frequencies the block natural frequencies in order to determine the technical state of cylinder-piston and bearing supports pairs.
The FEM represents an useful tool for theoretical determination of natural frequencies in objects with great complexity
In the block vibration in natural frequencies exist peaks that are higher when the engine has wear in its kinematic pairs, ought to occurrence of impact forces.

