










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkINTRODUCCIÓN
El desarrollo de la ciencia y la tecnología, desde la perspectiva de la salud pública y todos sus actores implicados desde las más diversas profesiones, pero con el común objetivo de la vida más plena de sus conciudadanos, enfrenta la creciente incidencia de las denominadas enfermedades o accidentes cerebrovasculares (ACV), tercera causa de las defunciones y discapacidad parcial o total de las extremidades motoras [1, 2].
Estos pacientes, como parte de su tratamiento neurológico, reciben largas jornadas de entrenamiento fisioterapéutico de los miembros afectados, en pro de la recuperación en la mayor medida posible de su rango de movilidad articular y la fortaleza muscular. No obstante, los niveles de recuperación con el trabajo fisioterapéutico tradicional son muy reservados [3, 4].
Según datos de los sistemas de salud, los accidentes cerebrovasculares ocupan en el mundo la tercera causa de fallecimientos de las personas, estimándose una tasa anual de unos quince millones de pacientes [4], de los cuales cinco millones quedan con alguna discapacidad permanente. En Cuba la incidencia de la enfermedad se calcula en unos 22000 casos anuales de los cuales el 50 ÷ 70 % de los casos sobrevivientes quedan secuelas, un tercio de estos son incapaces de valerse por sí mismos y aproximadamente el 75 % pierde sus facultades para reincorporarse al trabajo [3, 4]. Se estima que en el país ocurren setenta nuevos ictus por día [5].
Estas lesiones necesitan de tratamientos de rehabilitación con largas sesiones de fisioterapia que se realizan de forma manual involucrando rutinas de movimientos en las que se requiere esfuerzo físico por parte del fisioterapeuta, lo que puede provocar que al final de una jornada este, por los efectos del cansancio físico, no realice los procedimientos adecuadamente. Adicionalmente, en algunos tipos de terapia el fisioterapeuta debe aplicar una resistencia al movimiento del paciente, la fuerza aplicada debe ser controlada para evitar generar una lesión mayor, si esta no es aplicada correctamente se puede provocar un temor al dolor en el paciente a las terapias y por ende una tensión de los músculos afectados, lo que con lleva a un retraso significativo en la evolución del tratamiento.
Los exoesqueletos son estructuras externas rígidas que incorporan actuadores que permiten movimientos controlados y precisos además de sensores que brindan información del movimiento relacionada con el ángulo, la velocidad y la aceleración. Posibilitan en los más avanzados, capturar la actividad eléctrica muscular del paciente (señales electromiográficas) o electroencefalografía (EEG), relacionada a la intencionalidad del movimiento. Sus aplicaciones en tal sentido auguran un amplio espectro que va desde los procesos de rehabilitación de pacientes hasta la sustitución de las funciones vitales, por ejemplo, el andar en personas con patologías permanentes [6-8].
Constituye el objetivo de este trabajo aplicar una metodología que integra criterios de diseño, biomecánicos y clínicos en el desarrollo del exoesqueleto para la rehabilitación del miembro superior en pacientes hemipléjicos, garantizando el complemento del diseño de la armadura mecánica con sencillos sistemas de control y seguridad, así como una interfaz para el control del exoesqueleto por parte del fisioterapeuta, lo cual constituye su significación práctica.
MÉTODOS Y MATERIALES
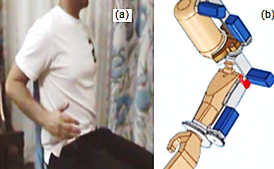
En su concepción general la figura 1 muestra la propuesta de la plataforma de rehabilitación de miembro superior.

Esta propuesta para el modo de control activo basado en el procesamiento de señales EEG como declaración de intencionalidad del movimiento a partir del concepto de imaginación motora (IM) constituye el principio de las arquitecturas más avanzadas para equipos de neurorrehabilitación y que se conocen como sistemas BCI-IM (Interfaz Cerebro - Computadora - Imaginación Motora).
No es conocido un procedimiento o metodología integradora para un diseño racional de un exoesqueleto para la rehabilitación de miembros superiores que incluya actuadores, sistema sensorial y de control sobre la base de criterios biomecánicos y clínicos. El procedimiento propuesto se puede resumir como sigue:
Análisis de movimientos, parámetros cinemáticos y cinéticos: implica un estudio de los movimientos que se utilizan en la práctica clínica de rehabilitación, estableciendo en cada caso los niveles de desplazamientos fisiológicos para cada grado de libertad de las articulaciones y segmentos corporales que participan. Las rutinas que se concibieron en el diseño incluyeron movimientos a partir de 4 grados de libertad (5 movimientos terapéuticos): flexión y extensión del hombro, flexión y extensión del codo, pronación y supinación del antebrazo, rotación y abducción del brazo.
Esta etapa contiene además, a partir de las dimensiones antropométricas de los pacientes (peso y altura), la determinación de las dimensiones y peso del miembro superior de los sujetos con arreglo a los trabajos de Winter [9], a partir de los cuales se construyó el modelo virtual de la extremidad superior conforme a las características de los pacientes promedio así como otros factores cinéticos (por ejemplo grado de espasticidad) dado que la armadura mecánica debe ser personalizadamente ajustable a cada uno de los pacientes. Los cálculos fueron practicados para personas con un rango de altura, H = (1,4 ÷ 1,85) m y peso promedio W = (50 ÷ 100) Kg [10].
Selección de los actuadores: para los diferentes grados de libertad se calculó el torque necesario, asumiendo que un paciente promedio genera un torque normal, igual al que se calcula al realizar un análisis estático[11]. A partir de los torques determinados para los diferentes movimientos, se determina la potencia requerida de los motores eléctricos y se complementa el sistema de actuadores seleccionando el tipo (elástico, hidráulicos, neumáticos, cajas reductoras, etc. Considerando que el mejor actuador es aquel más sencillo, funcional, ligero y económico, se decidió considerar un diseño de la armadura accionada con el empleo de motores eléctricos, cajas reductoras y placas deslizantes de ajuste [66-70]. Se tuvo en cuenta en la propuesta inicial que el diseño concebido fuera capaz de simular los movimientos que se requerirían durante el proceso de rehabilitación, para lo cual se realizó una modelación cinemática previa a partir de un modelo preliminar empleando para ello el software profesional SolidWorks, figura 2.
La velocidad de giro de cada articulación se estimó en el rango de 20 ÷ 25 º/sa partir del consenso de los diseñadores y fisioterapeutas, por la peculiaridad de las rutinas que se emplean en la rehabilitación. En calidad de motores eléctricos se emplearon motores paso a paso (MPP) conocidos por su empleo para realizar movimientos muy precisos.
 Fuente: autores
Fuente: autoresFig. 2 (a) Rutina con flexión del codo, extensión del hombro y pronosupinación del antebrazo, (b) Simulación cinemática de la misma rutina a partir del diseño concebido.
Geometría de los modelos: se construyen los modelos de los diferentes elementos en un ambiente CAD. Las dimensiones de las piezas se establecen preliminarmente para asegurar las condiciones cinemáticas de funcionamiento, garantizar la antropometría de los mecanismos que garanticen condiciones ergonómicas y seguras para los pacientes. La figura 3 muestra la modelación CAD de los diferentes componentes del exoesqueleto
Control del diseño mecánico de la armadura: con la aplicación del MEF y obtenidos los modelos geométricos y a partir de las condiciones cinemáticas y cinéticas establecidas, se procede a la modelación matemática de los elementos a evaluar. Con la aplicación de este método, ya en este contexto, es posible dar respuestas a problemas estructurales y de diseño en las condiciones más críticas de trabajo.

Diseño del sistema de control: implica desarrollar sobre la base de la tecnología de microprocesadores o microcontroladores o tecnología afín, el sistema encargado de garantizar las velocidades de operación del equipo, los desplazamientos angulares de cada uno de los mecanismos y su ubicación espacial para dar cumplimiento a las rutinas terapéuticas previamente seleccionadas. Incorpora los sistemas electrónicos e informáticos que garantizan la seguridad del paciente y un óptimo funcionamiento del equipo a través de interfaz gráfica de usuario, habilitar nuevas rutinas terapéuticas, controlar en tiempo real el número de las repeticiones, registrar todos los datos que sean de interés en cada sesión y registrar en cada una de estas los índices evolutivos de la rehabilitación del paciente. En los exoesqueletos activos existe un sistema de captura de señales de declaración de intención (EMG o EEG), que se procesa, se registra y se envía al microcontrolador que emite la orden de movimiento a los actuadores.

Evaluación de la eficacia y eficiencia de la terapia robótica: Se propone un protocolo de estudio piloto que evalúa mediante indicadores clínicos (intensidad del dolor, espasticidad, goniometría activa, tono muscular y estudios radiológicos y neurológicos) la evolución del paciente y permite establecer comparaciones con otros tipos de terapia. Una vez diseñado y construido este prototipo con arreglo al mencionado protocolo fue utilizado en un estudio piloto en el Hospital Clínico- Quirúrgico J.B. Zayas de Santiago de Cuba en pacientes hemipléjicos con síndrome de hombro doloroso. El reporte de este estudio puede encontrarse en [12].
RESULTADOS Y DISCUSIÓN
Diseño mecánico del prototipo del exoesqueleto
A partir de la determinación de los parámetros antropométricos de los pacientes y como resultado del análisis practicado los torques calculados para cada movimiento terapéutico se presentan en la tabla 1.
Tabla 1 Torques calculados por articulación y segmento corporal.
| Peso del paciente (kg). | Torque Flexo-extensión hombro (N·m) | Torque Flexo-extensión codo (N·m) | Torque prono-supinación del antebrazo (N·m) | Torque rotación del brazo (N·m) |
|---|---|---|---|---|
| 50 | 13,9 | 2,75 | 0,490 | 9,45 |
| 100 | 27,8 | 5,50 | 0,965 | 20,80 |
Fuente: autores
Con arreglo al procedimiento expuesto y una vez seleccionados los movimientos incluidos en las rutinas terapéuticas, seleccionados los actuadores y generados los modelos CAD se controló la estructura para garantizar la ergonomía y propiamente la funcionabilidad. El control fue practicado mediante el Método de los Elementos Finitos sometiendo la estructura a las condiciones máximas requeridas de servicio en el ambiente clínico. La tabla 2 muestra las propiedades mecánicas de los materiales en los diferentes elementos empleados en la estructura.
Tabla 2 Propiedades mecánicas de los materiales para la aplicación del MEF.
| Material | Módulo elástico (MPa) | Coeficiente de Poisson | Densidad (Kg/m3) | Límite elástico (MPa) |
|---|---|---|---|---|
| AISI 304 | 1,9 105 | 0,29 | 7,92 | 206 |
| AISI 1020 | 2,0·105 | 0,29 | 7,90 | 330 |
| SAE 4140 | 2,0·105 | 0,28 | 7,80 | 436 |
Fuente: autores
Es de señalar que aquellos materiales que forman parte de la estructura y que no son aceros del tipo inoxidable recibieron tratamiento termoquímico de pavonado. En esta sesión se presentarán el diseño de los mecanismos de rotación del brazo y el de pronosupinación, así como el control de la armazón de la estructura.
Diseño de la transmisión por engranaje del mecanismo de rotación del brazo.
Las dimensiones del par fueron seleccionadas (Dp1 = 33 mm, Dp2 = 198 mm) a partir de dos criterios fundamentales, relacionados con las dimensiones requeridas para ajustarse a las dimensiones del brazo de una persona de 50 ÷ 100 kg de peso y con arreglo a las normas AGMA [13,14], figura 5(a). Se seleccionó un módulo que satisfaga las condiciones de servicio (i = 6, velocidad de 4,164 rpm, y una potencia de 8,97 W, m = 1,5 mm. La geometría final de las ruedas se presenta en función del número de dientes y el módulo. Por su seguridad, sencillez de fabricación, las bajas velocidades y cargas ligeras se decidió fabricarles de dientes rectos. En calidad de material para las ruedas, el acero AISI 304.
Adicionalmente se tuvo presente que para ciertas combinaciones de números de dientes se puede presentar interferencia entre la punta del diente del piñón con el chaflán o raíz del diente del engrane, lo cual resulta intolerable. La probabilidad de que se presente interferencia es mayor cuando un piñón pequeño impulsa a un engrane grande. Para evitar la interferencia se elaboraron los dientes de los engranes mediante el proceso de generación, el cual garantiza que la interferencia se elimina de manera automática porque la herramienta de corte remueve la parte interferente del flanco [13].
 Fuente: autores
Fuente: autoresFig. 5 (a) Mecanismo de rotación del brazo, mallado de los elementos del mecanismo de rotación del brazo. (b) Sector dentado con 100 913 nodos y 59 603 elementos (c) Piñón con 105 473 nodos y 65 409 elementos.
Para el control del mecanismo de rotación del brazo se empleó el MEF, aplicando para ello como se ha comentado el software profesional ANSYS Workbench v15.0, figura 6.
 Fuente: autores
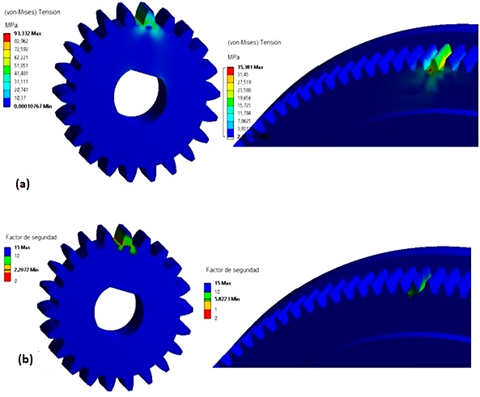
Fuente: autoresFig. 6 (a) Piñón del mecanismo de rotación del brazo, distribución de tensiones y factor de seguridad. (b) Sector dentado de rotación del brazo, distribución de tensiones, σmax = 35,38 MPay factor de seguridad = 5,8.
Como se puede observar las tensiones máximas en el piñón son del orden de los 93 MPa, arrojando un factor de seguridad de 2,2, mientras que en el sector dentado son de aproximadamente 36 MPa y una reserva de seguridad de 5,8.
Diseño de los engranes del mecanismo de pronosupinación
El mecanismo de pronación y supinación del antebrazo se concibió con una cómoda combinación de engrane-sector dentado, figura 7. Para la elección del módulo de esta trasmisión se tomó como parámetros fundamentales, las dimensiones de muñeca (Dp2 = 120 mm), la relación de transmisión (i = 8, entonces: Dp1 = 15 mm), la potencia necesaria (aún más baja, 0,41 Watt) y conservando la velocidad (4,164 rpm). Se seleccionó de igual forma el material acero inoxidable AISI 304, para estas condiciones las normas AGMA establecen el empleo del módulo m = 1 mm.
 Fuente: autores
Fuente: autoresFig. 7 (a) Mecanismo de pronosupinación. (b) Mallado del piñón con 98 370 nodos y 36 801 elementos. (c) Sector dentado con 100 332 nodos y 56 521 elementos.
Los resultados del control al mecanismo se muestran en la figura 8. En el mecanismo, las tensiones apenas superan los 2 y 4 MPa para la rueda y piñón respectivamente lo cual implica un nivel de seguridad más que suficiente con arreglo al material seleccionado.

Diseño de la estructura o armazón
Para la definición de las dimensiones de la armadura, más allá de las transmisiones por engranes complementarias analizadas y antropométricamente definidas; se empleó como condición crítica del programa terapéutico establecido clínicamente, la condición de flexión del hombro a 90° y codo extendido, considerando en este caso no sólo el peso de la armadura sino además el de miembro superior. Tal condición es coincidente además con la abducción del miembro superior.
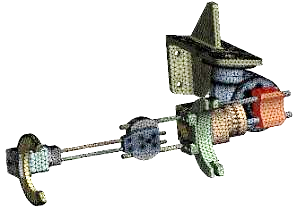
Para el cálculo se consideraron las propiedades mecánicas de cada material propuesto, tabla 2. Calculando en conjunto los elementos que componen la armadura mecánica, así pues, el mallado del modelo geométrico establecido en la figura 3 se presenta en la figura 9.
Como resultado de esa modelación la figura 10 muestra el análisis de tensiones y factor de seguridad para la armadura del exoesqueleto.
 Fuente: autores
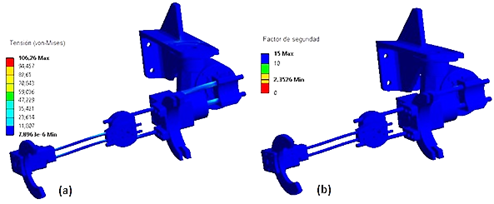
Fuente: autoresFig. 10 (a) Distribución de tensiones en la armazón para la condición más crítica en el programa de rehabilitación, σmax = 106,26 MPa. (b) Factor de seguridad n = 2,3.
Como se puede observar la armadura presenta un factor de seguridad de 2,3 encontrándose las tensiones máximas en las barras de regulación del hombro, de aquí que existan reservas de seguridad en sus elementos.
Sistema de control y seguridad
El exoesqueleto, para el control pasivo, figura 11, en su totalidad está compuesto primeramente por la computadora, mediante la cual el operario o fisioterapeuta, puede interactuar con él y dominarlo a través de una interfaz gráfica, figura 12, la cual debe ofrecer las facilidades de usar y crear nuevas rutinas, almacenar (Guardar) dichas rutinas, así como Abrir las mismas para ejecutarlas nuevamente, además de poder modificar la cantidad de Repeticiones, la Velocidad a la que se ejecutarán los movimientos y botones de Pausa y Detener, en caso de paradas de emergencia. Se incluye además una Ayuda, para aprender a trabajar con el equipo.
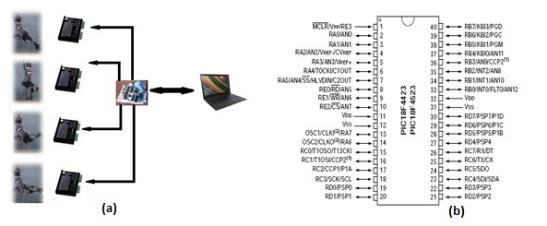

La computadora se comunica con la tarjeta controladora a través del puerto serie o del USB, mediante un adaptador que crea un puerto COM serie virtual en la PC, esta se encarga, en dependencia de los comandos enviados desde la PC, de mover los motores correspondientes a la velocidad establecida y el ángulo correspondiente; como la tarjeta no puede proveer la potencia necesaria para mover los MPP(actuadores),se hace necesario que entre esta y los actuadores existan los drivers, los cuales se encargan de la potencia (voltaje y corriente) y de convertir los pulsos enviados por la tarjeta en pasos del motor, así como de establecer el sentido de giro. La tarjeta controladora está basada en tecnología PIC, para lo cual fue seleccionado el PIC 18LF4523 el cual ofrece un alto rendimiento computacional a un precio económico, figura 11 (b).
El LabWindows/CVI es un sistema de desarrollo de software para programadores en C y fue empleado para programar el PIC. El controlador (driver) seleccionado fue el M542 V2.0, este es de un alto rendimiento y opera en modo micropaso, basado en la tecnología de control de una corriente sinusoidal pura. Debido a tecnologías anteriores y a la de autoajuste (autoajuste de los parámetros de control de corriente) acorde a los diferentes motores, este puede manejar a los motores con un nivel bajo de ruido, bajo calentamiento, un movimiento suave y tener mejores desempeños a altas velocidades que los demás drivers comerciales.
La interfaz diseñada presenta las siguientes características y prestaciones: posibilidad de mover las articulaciones de forma independiente, seleccionando la articulación, el sentido y los grados que se desea mover, controlar las repeticiones que se desean, así como un conteo progresivo de las que se ejecutan y restan por ejecutar, control del tiempo de duración de cada una de las rutinas, seleccionar un grupo de rutinas ya programadas cual se desea ejecutar, crear nuevas rutinas y guardarlas, así como poder abrirlas y ejecutarlas nuevamente, botones de Play/Pausa, de Detener y de Salir, Barra de menú para Abrir, Guardar y la Ayuda, posibilidad de escoger entre dos velocidades para la ejecución de la rutina y leds indicadores de estado.
El diseño propuesto del sistema de seguridad contempló varias alternativas desde diferentes perspectivas: a partir del software se permite en cualquier momento detener definitivamente cualquier ejecución en marcha, también permite evitar entradas de desplazamientos angulares más allá de aquellos fisiológicos para cada una de las articulaciones. El sistema implementado incorpora además limitadores de recorrido en cada una de las articulaciones dispuestos de forma tal que para los desplazamientos más allá del valor límite los limitadores desenergizan el motor que alimenta la articulación en cuestión. La plataforma incluye además un pedal y botón de seguridad conectados directamente a la fuente de energía, y siendo accionados directamente por el paciente o fisioterapeuta detiene cualquier ejecución en progreso.
CONCLUSIONES
En el trabajo se obtuvo una metodología integradora para el desarrollo y evaluación en un entorno clínico de un exoesqueleto robótico para la rehabilitación del miembro superior del paciente hemipléjico y que puede emplearse en el tratamiento de otras ACV y patologías que afecten al miembro superior. Se sustenta en un procedimiento de diseño en el que se integran aspectos biomecánicos que condicionan parámetros de diseño y de control de la plataforma robótica con protocolos de análisis clínico para la evaluación de la funcionabilidad del equipo de rehabilitación.

