










 Custom services
Custom services
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
Introducción
El exhaustivo avance tecnológico y de las comunicaciones ha llegado hasta sectores económicos donde nunca antes se había relacionado, por ejemplo, en el caso de “controlar” remotamente una cafetera o algún artefacto electrónico en nuestro hogar sin la necesidad de estar a unos metros de distancia sino entando a kilómetros de distancia del artefacto, este es un término muy conocido como la domótica en este caso.
Hoy en día escuchar el término “drones” o vehículos aéreos no tripulados “UAV (unmanned aerial vehicle)” no es para nada desconocido, pero comúnmente se lo conoce como un objeto volador al que se le adapta una cámara para sacar buenas fotos de paisajes y diferente toma de videos. Pero los UAV van más allá de simples fotografías, existe la utilización de los mismos para uso militar, industrial, en medicina, agricultura y un sinfín de aplicaciones de los UAV en los diferentes sectores económicos.
Dentro de los sectores económicos, el principal corresponde a la agricultura, que es el que mueve la economía de muchos países y es necesario que este sector tenga la asistencia de las nuevas tecnologías, de esta manera se podrá combinar la agricultura con las tecnologías de la información y comunicación (TIC’s).
El uso de UAV en la agricultura de precisión es utilizado para diferentes aplicaciones, desde fumigación a los sembríos hasta el control de plagas. En el campus experimental “La María” de la Universidad Técnica Estatal de Quevedo (UTEQ), existen diferentes áreas dedicadas a la agricultura. Es en estas áreas donde se desea brindar la aplicación de las tecnologías y redes de telecomunicaciones que pueden asistir a la agricultura de precisión.
Un aspecto importante será la red de comunicaciones FANET (Flying ad hoc network) (Chriki, et al., 2019) que se debe determinar para la red de UAV´s, esta red tendrá el importante trabajo de redireccionar los datos recolectados por los UAV para luego ser analizados ya sea por algún especialista en el área de la agricultura o un software dedicado al análisis de este tipo de información y así dar un avance tecnológico en la aplicación del Internet de las cosas (IoT) y la teledetección agrícola.
Desarrollo
Pruebas de vuelo y estadísticas de cada UAV.
Tabla 1 - Parámetros a consideración para la red de UAVs adquiridos.
| Nombre | Tipo | Tiempo de vuelo | Tiempo de carga de las baterías | Conectividad | Conexión inalámbrica (distancia) |
| F-450 | Quadcopter | 9min | 350min | 2.4Ghz | 250m |
| Parrot disco PRO AG | Ala fija | 25min | 250min | 2.4 y 5.2Ghz | 2km |
| Bayangtoys | Quadcopter | 15min | 200min | 2.4Ghz y Wifi 5Ghz | 360m |
La siguiente información (Tabla 1) recolectada será mediante las pruebas realizadas a cada UAV de manera independiente y luego en conjunto con la red FANET, esto para determinar datos como: autonomía de vuelo, tiempo de carga de las baterías, comunicación entre el UAV y la controladora de vuelo RC (radio control, frecuencias) y por último pruebas de conexión inalámbrica con la red local (distancia).
Los siguientes parámetros y datos registrados en la siguiente tabla se recolectaron haciendo pruebas de vuelo a cada uno de los UAVs (Tabla 2).
Tabla 2 - Resultados para cada UAV.
| Características | Raspberry pi | Pitaya stem lab | ARDUINO |
|---|---|---|---|
| Tipo de chip integrado para procesamiento | Microprocesador (ARM Cortex-A53) | FPGA | Microcontrolador (ATmega328) |
| Servidor web, FTP, multimedia | Si | No | No |
| Procesamiento de imágenes, OPEN CV, SIMPLE CV | Si | No | No |
| DOMOTICA | Si | Si | Si |
| Conectividad | Si | Requiere módulos de conectividad | Requiere módulos de conectividad |
| Multitarea | Si | Si | No |
| Puerto de cámara CSI | Si | No | No |
| Puerto Ethernet | Si | Si | No |
| Costo | $75 | $400 | $33 |
Con esta información sobre los parámetros que se ha elegido, podemos tener una idea del tipo de topología que se elegiría para nuestra red de drones. Para nuestro estudio tomamos estos parámetros por los siguientes escenarios que tendremos a consideración para montar una red de drones, más adelante, en los siguientes apartados mostraremos los escenarios en los que se realizaron pruebas.
Existen una variedad de dispositivos de conectividad que ayudarían en la comunicación de datos entre los UAVs, entre todos estos dispositivos se estudió tres posibles hardwares y finalmente se optó por elegir el que nos brinde mejores beneficios y sobre todo precios.
Sin duda la Raspberry pi es uno de los hardware que mejores características presta para este tipo trabajo, los otros hardware tienen su utilidad, pero dependiendo del tipo de trabajo para lo que se los use (Escola Tècnica Superior d'Enginyeria Informàtica, 2013).
La Raspberry pi nos brinda una interfaz gráfica que facilita la configuración de la misma, en costos varía dependiendo la categoría que se desea adquirir (en este proyecto de investigación se optó por utilizar la Raspberry pi 3) y otras de las razones por la que se eligió la raspberry pi fue por la cantidad de trabajos relacionados a este proyecto, donde
Configuración de raspberry como Access Point aplicado al Escenario 1
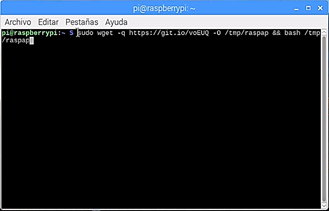
Paso 1: Antes de realizar los pasos descriptos en esta sección procuren haber reseteado la placa microprocesadora de Raspberry, luego asegúrese de haber formateado la tarjeta SD (en este trabajo utilizamos la Raspberry pi 3 y una tarjeta SD de 32GB clase 10 o tipo 10). Teniendo estos procedimientos ya procedemos a realizar la sucesión de pasos de esta sección. Escribimos el siguiente comando para la descarga de un paquete necesario para la configuración de la raspberry como AP (Fig 1).
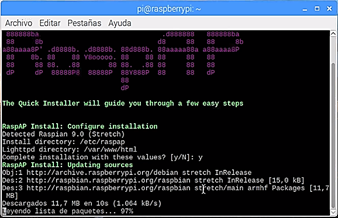
Esperamos varios segundos hasta que nos aparezca un mensaje con el nombre de la ap de Raspberry “RaspAp”. Nos pregunta si queremos completar la instalación en los directorios, así como se muestra en la Fig.2.

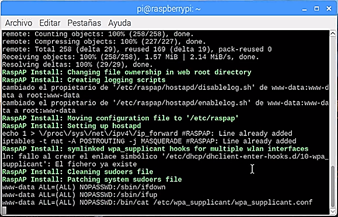
Esto demorará varios minutos, hasta que descargue e instale los paquetes necesarios para una correcta instalación (Fig 3).
Nos preguntará si queremos utilizar el “http only” en las sesiones para el panel de control, confirmamos esta acción escribiendo ‘SI’ (Fig 4).

Y se procede a hacer todas las redirecciones correspondientes hacia la interfaz de salida (Fig 5).
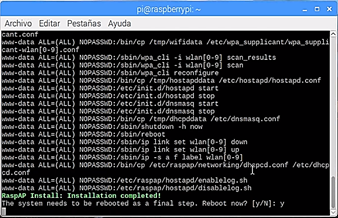
Debe salir un mensaje de instalación completada (Installation completed). Y posteriormente nos pedirá reiniciar la raspberry, le decimos que sí (Figura 6).
PASO 2: Una vez reiniciada la raspberry ya tenemos una GUI (interfaz de usuario gráfica), buscamos y abrimos el navegador chromium y escribimos localhost (Figura 7).
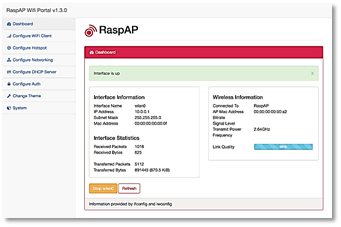
Posteriormente nos pedirá ingresar usuario y contraseña ingresamos los datos por defecto, pero después se cambiará esta información. Y se abrirá una interfaz gráfica (Fig 8).
PASO 3: Se deberá hacer clic en configure hostpot. En interface seleccionamos wlan0 para un interfaz wifi para punto de acceso, en SSID colocamos un nombre deseado para nuestra Red, en Wireless Mode seleccionamos “g” esto es simplemente el estándar que se desea utilizar y en channel se selecciona el canal que este menos este saturado para que no allá demasiada interferencia en la comunicación. Aquí es recomendable contar con alguna App que facilite ver el tráfico de la red en la zona donde se va a utilizar la raspberry como AP, así podremos observar los canales saturados, evitar interferencias y utilizar el mejor canal para nuestro wifi (Fig 9).

Posteriormente damos clic en la pestaña Security y seleccionamos el tipo de seguridad inalámbrica (WPA2 recomendable y encriptación AES) que queremos para nuestra red (Fig 10).

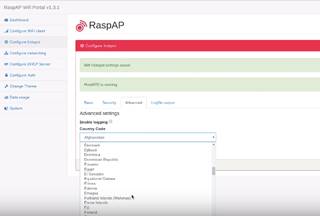
Aquí en este apartado seleccionaremos el código de nuestro país y damos clic en save setting para guardar las configuraciones hechas (Fig 11).
Después damos clic en la pestaña Basic y damos clic en Stop hostpot y después en save setting para guardar las configuraciones hechas (Fig 12).

Después damos clic en Configure DHCP Server. La configuración en este apartado nos va a permitir darle un rango de IP y luego darles a los usuarios que se conecten a nuestra red una de las IP disponibles (Fig 13).

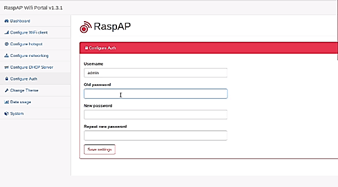
En el apartado configure Auth cambiaremos el usuario y contraseña la cual nos va a permitir entrar a las configuraciones de administrador. Por último, guardamos nuestra configuración (Fig 14).
Después de haber hechos todas estas configuraciones reiniciamos la raspberry.
NOTA: Si la IP de Access Point no cambiado debemos editar el fichero que determina la IP del punto de acceso a través de la consola de raspbian (S.O. de raspberry).
PASO 4: Para comprobar que el punto de acceso esté funcionando, nos dirigimos a una PC y nos conectamos a la red de la raspberry configurada como Access Point, después nos dirigimos a raspbian y abrimos el navegador chromium posteriormente escribimos localhost y accederemos a las configuración grafica en la cual haremos clic en la pestaña Configure DHCP Server, nos dirigimos al apartado Client List y verificamos que esté conectado la PC viendo su información básica como su IP, MAC, nombre (Fig 15).

Configuración para streaming de video entre la raspberry pi y pc para el Escenario 2
PASO 1: En primera instancia se deberá actualizar la raspberry utilizando los siguientes comandos:
$ sudo apt-get update
$ sudo apt-get upgrade
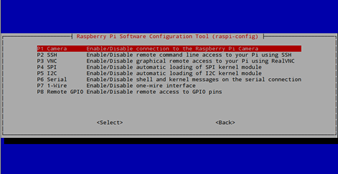
PASO 2: Una vez hecho lo anterior escribimos el comando “sudo raspi-config” para entrar a configuraciones y habilitar la cámara raspberry (Figs 16 y 17).

PASO 3: Se deberá descargar el software VLC en la PC que ejecuta Windows de la siguiente dirección web “http://www.videolan.org/vlc/index.html” por consiguiente su instalación (Fig 18).
Ahora se tendrá que descargar e instalar VLC en la raspberry con el siguiente comando:
$ sudo apt-get install vlc
PASO 4: Después de haber instalado VLC tanto en la Raspberry como en el PC se procede a realizar la transmisión de video con el siguiente comando:
$ raspivid -o - -t 0 -hf -w 1920 -h 1080 -fps 30 | cvlc -vvv stream: /// dev / stdin --sout '#standard {access = http, mux = ts, dst =: 8160}': demux = h264
Donde -o especifica el nombre del archivo de salida (el símbolo '-' indica que no hay nombre de archivo), -t es la duración de la grabación, siendo 0 infinito, -hf es el flip horizontal, -w es el ancho en lo que respecta en la dimensión del video y -h es la altura, -fps son los fotogramas por segundo del video. Los datos se enviarán por http empleando el códec de vídeo h264 como estándar de salida Stdout usando VLC y el puerto 8160.
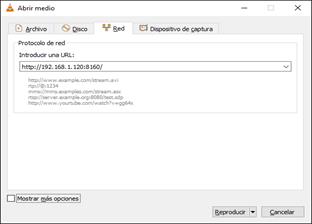
PASO 5: En el dispositivo ejecutando Windows se deberá ejecutar el software VLC, posteriormente hacer clic en la pestaña Medio, clic en abrir ubicación de red y procedemos a escribir los siguiente: http: // x.x.x.x: 8160, en nuestro caso http://192.168.1.120:8160/.
Se debe colocar la IP de la raspberry, para saber dicha IP se debe ingresar en la consola de raspbian el comando “ifconfig”. Si está utilizando una conexión inalámbrica, la IP que desea se encuentra en wlan0 inet x.x.x.x. Si estás usando ethernet, estará en eth0 inet x.x.x.x (Fig 19).
Una vez realizado toda esta configuración la cámara conectada a la raspberry pi se encenderá, comenzará a grabar y simultáneamente la enviará por http. VLC comenzará a reproducir automáticamente la transmisión desde el Raspberry Pi a través de la red.
Aquí podemos dar por terminado las configuraciones de los equipos o dispositivos de conectividad que utilizaremos en la red de drones, principalmente con los de conectividad para poder establecer una especie de red de área local (LAN) en donde sólo puedan tener acceso los drones o dispositivos que se autentiquen y se les confiera permisos.
Implementación y pruebas de funcionamiento de la red de UAV’s y arquitectura FANET.
Se utilizó el UAV F-450 en el cual iba montado una raspberry pi 3 la cual se había configurado como AP (Access Point).
Simulación del escenario 1

En esta red, el nodo principal viene a estar conformado por el UAV F-450 (Figura 20), éste drone será el encargado de dar conectividad a los demás drones y a la estación en tierra. Es decir, que todo el tráfico de datos de la red pasará por este drone, viéndolo desde un punto más técnico este UAV F-450 haría la función de servidor y los demás dispositivos como clientes, es decir, una arquitectura cliente-servidor.
Acondicionamiento del Drone F450
Se utilizó el UAV F-450 en el cual iba montado una raspberry pi 3 la cual se había configurado como AP (Access Point) (Fig 21).

Se la ubicó en la parte central del drone, teniendo en cuenta el balanceo del peso del UAV que es un factor muy importante ya que puede presentar problemas al tomar vuelo. Así tenemos el acondicionamiento del drone con el hardware que permitirá crear una red inalámbrica de datos. Por último, la alimentación de la raspberry es independiente (se utilizó una power-bank portátil) de la fuente de alimentación del UAV, así que no presentará una desventaja considerable en la autonomía de vuelo del drone. Se ubico una cámara en la parte frontal del drone para el levantamiento multimedia de información del terreno (Fig 22).

Pruebas de conexión entre drones y la GCS.
En el escenario 1 (véase Fig 20), encontramos una red de drones donde el UAV F-450 es el nodo principal de la red, es una de las “arquitecturas” o se podría llamar topología de red que se ha optado por realizar como primeras pruebas de funcionamiento, pero esto nos lleva a una importante desventaja: al ser el drone F-450 el nodo principal, en este caso haciendo la función de una AP (acces point), en el momento que al drone comience a descargarse su batería, habrá la necesidad de hacerlo aterrizar para poder cambiar su batería o recargarla. Es decir, la red va a depender mucho de la autonomía de vuelo del drone.
En las siguientes Figuras se mostrará la exitosa conexión de la red FANET:

En la Fig 23 tenemos nuestro UAV F-450 acondicionado con una Raspberry, la misma que hará como AP para brindar conectividad a todos los dispositivos que detecten y tengan acceso a la red creada en la Raspberry (Fig 23).

Una vez el UAV en vuelo y con la red activa, se logró hacer pruebas del área de cobertura de la red, se elevó el drone a una altura aproximada a 15m para hacer un cálculo de la distancia y potencia de la red inalámbrica de la raspberry (Fig 24).

En la figura 25 se puede observar la conectividad del celular a la red que emite el drone F-450, se recepta una buena señal de la conexión inalámbrica a pesar de estar a 15m de altura.

En la figura 26 se tienen los parámetros e información que nos brinda el celular acerca de la conexión a la red Wifi-Drone del UAV F-450, podemos observar como la red le ha asignado una IP 10.1.112.2, una máscara de subred 255.255.255.0 y la Gateway o puerta de enlace 10.1.112.1 al host que en este caso es el celular. Desde el otro extremo, tenemos la PC también conectada a la red Wifi-Drone.

Como se observa en la figura 27 se ha optado por realizar un ping hacia la dirección IP del otro host que en este caso es el celular. Ahí se muestra que el envío de paquetes ICMP (Internet Control Message Protocol) se realizó con éxito, dando como resultado el correcto funcionamiento de la red FANET en el escenario 1 (Tabla 3).
Tabla 3 - Ventajas y desventajas (Escenario 1).
| VENTAJAS | DESVENTAJAS |
|---|---|
| Menores costos | No es muy estable |
| Red desplazable o portátil | La red depende de la autonomía del UAV |
| La distancia del UAV y la GCS debe ser menor al rango de cobertura que ofrece la red inalámbrica de la raspberry. |
Sin embargo, este escenario puede ser útil en el caso de que se quiera recolectar datos y luego procesarlos (no en tiempo real) y que sean para cubrir zonas muy alejadas donde el UAV que porta la red inalámbrica (F-450) pueda dirigirse junto con el UAV (Parrot AG) entre un lapso de tiempo limitado, en este caso, lo que duraría la autonomía de vuelo del UAV F-450. Sería en casos donde el terreno o la zona que se vaya a analizar sea muy corta, proporcionalmente al tiempo que tiene el drone portador de la red inalámbrica.
Simulación Escenario 2
Al igual que el escenario anterior se realizó una simulación en packet tracer antes de la implementación y las pruebas de funcionamiento (Fig 28).
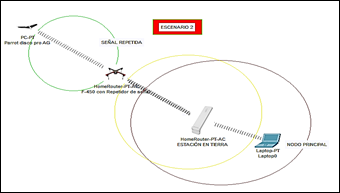
Este escenario 2 es similar al anterior, pero con la diferencia que ahora el nodo principal está en el GCS (Estación de Control en Tierra) y ahora el UAV F-450 lleva adaptado un repetidor y lo que hará este repetidor es precisamente como su nombre lo indica, repetir la señal inalámbrica de la GCS hasta llegar a darle conectividad al UAV Parrot que está más lejos de la zona de cobertura en este caso. Con esta topología o escenario podríamos cubrir mayores zonas en sembríos grandes sin perder la conectividad y así tener comunicación directa con la estación en tierra (Blanco Iza, 2015).
Acondicionamiento del Drone F450 y el Drone Dayangtoys x22
Al UAV F450 se le instalo un repetidor Tenda para que asista al Bayangtoys cuando la señal entre el GCS y el Bayangtoys sea débil. El repetidor se lo instalo en la parte central del Drone tomando en cuenta la estabilidad que este debe tener al volar (Fig 29).

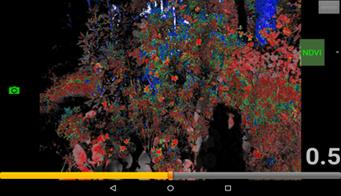
Por otro lado, se acondiciono al UAV Bayangtoys x22 con un dispositivo móvil y una cámara que soporten una aplicación para realizar el análisis NDVI (Fig 30).

Visualización de los datos recolectados por la red de drones.
Para detectar el índice de vegetación se usó una APP especial llamada Imscope que mediante el procesamiento de imágenes y una variedad de filtros permite la visualización de indicadores de la salud vegetal (Fig 31).
Las tomas hechas por la cámara se las visualizo en una laptop utilizando el software ApowerMirror para la visualización de imágenes en tiempo real (Fig 32).

Pruebas de funcionamiento del escenario 2
Para esta prueba contamos con una red inalámbrica en tierra CSG compuesta por una laptop, esta señal wifi será amplificada por el repetidor que lleva el drone f450, permitiendo así mayor cobertura de señal para el drone Bayangtoys (Fig 33).

Primero se puso en vuelo los drones para analizar el rendimiento de la señal de cobertura. La visualización del contenido en tiempo real se hizo a través del software ApowerMirror instalada tanto en la laptop como en el dispositivo móvil, que nos permitió tomar fotos aéreas con la app Imscope (Fig 34).
Una vez que los drones estaban en pleno vuelo se pudo visualizar en la laptop las tomas fotográficas que el Drone Bayangtoys realizaba a una altura de 30m. Teniendo una señal estable y fotos considerables para el análisis del índice de vegetación.
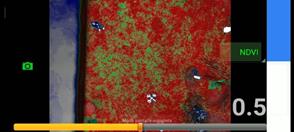
Se realizo tomas fotográficas NDVI en una parte del terreno en la UTEQ (Figura 36) en donde había vegetación, para probar la efectividad de la aplicación y entender la gama de colores que existe en esa toma fotografía, teniendo en cuenta la escala de colores NDVI que nos proporciona AURAVANT en su plataforma WEB (Fig 35).

Donde:
Valores cercanos al 1 indican vigorosidad de la vegetación.
Valores cercanos a 0 indican ausencia de vegetación.
Valores cercanos al -1 indican suelo desnudo o agua.
Según esta interpretación podemos darnos cuenta en la Figura 34 que el color rojo sobresale del verde y el azul, esto significa que existe ausencia de vegetación según la Figura 35, podemos agregar también que hay ciertas manchas de color verde no tan grande que la roja, esto significa que el pasto en esos lugares tiene vitalidad (Fig 36).

Conclusiones
Para llegar a determinar uno o varios dispositivos de conectividad fue necesario investigar en trabajos relacionados qué dispositivo utilizaron y según las características del dispositivo se optó por escoger uno adecuado y adaptable para este proyecto de investigación, ya sea por costos, configuraciones, interfaz y por casos de estudio que han realizado comparaciones entre un dispositivo u otro, para nuestra red de drones con la arquitectura Fanet utilizamos la Raspberry Pi 3 que con una combinación de GUI (Interfaz Gráfica de Usuario) e interfaz CLI (Interfaz de Línea de Comandos) se logró tener buenos resultados al momento de la recopilación y transmisión de datos que por medio del protocolo de red SFTP (Secure Protocolo de Transferencia de Archivos) el cual permitió que se transmitieran los datos u archivos (imágenes y videos) entre los UAVs conectados a la red FANET.
En la red FANET existió varios escenarios, uno mejor que el otro, en caso de la red fanet del escenario 1 se utilizó menos dispositivos de conectividad, es decir menos costos, pero no tan eficiente y estable como lo fue la red Fanet en el escenario 2, donde se obtuvo más estabilidad de la red, eficiencia y mayor alcance en la cobertura de la red. Cualquiera de estos escenarios que se implemente dará los resultados requeridos como es la transferencia de datos o información agrícola a la central de datos, como es nuestro caso, pero con el único detalle de la estabilidad de la red en comparación de un escenario con el otro.
Para el mapeo es suficiente con el UAV Parrot AG que cubre cierta zona de cobertura que luego de almacenar esos datos podrán ser analizados, pero junto con la red FANET tendremos la información recolectada por el UAV en tiempo real, esto utilizando otros drones acondicionados con los dispositivos necesarios para la transferencia y recolección de datos en donde se lograría obtener resultados del NDVI del campo agrícola con más efectividad y rapidez.

