










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Revista

Articulo
 texto en
texto en  Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista Ciencias Técnicas Agropecuarias
versión On-line ISSN 2071-0054
Rev Cie Téc Agr vol.28 no.2 San José de las Lajas abr.-un. 2019
ARTÍCULO ORIGINAL
Simulación de la descompactación de un suelo arcilloso empleando el método de elementos discretos
IUniversidad Central de las Villas “Marta Abreu”, Facultad de Ciencias Agrícolas, Departamento de Ingeniería Agrícola, Santa Clara, Villa Clara, Cuba.
IICatholic University of Leuven, Faculty of Bioscience Engineering, Department of Biosystems, Division of Mechatronics, Biostatistics and Sensors (MeBioS), Kasteelpark Arenberg 30, B-3001 Heverlee, Belgium.
La predicción de la fuerza de tiro y la dinámica de operaciones de descompactación de suelo fue realizada empleando el Método de los Elementos Discretos. Los parámetros del modelo fueron definidos en función de las propiedades mecánicas de un suelo arcilloso, previamente obtenidos mediante ensayos de laboratorio. Las propiedades empleadas en el modelo fueron: cohesión, adhesión, fricción interna, fricción externa, el módulo de Young y el coeficiente de Poisson. El efecto de la variación de la forma del subsolador fue simulado en condiciones de suelo compacto y seco, mostrando claras variaciones en la demanda de fuerza respecto a la geometría de la herramienta. Con el aumento en la complejidad geométrica de la herramienta, el modelo mostró ventajas en términos de demandada de fuerza y volumen de suelo removido. La descompactación de un suelo con formaciones de hardpan se simuló con el empleo de dos secciones con diferente compactación en un mismo bloque virtual. El nivel de compactación fue obtenido mediante el empleo de arreglos de partículas con diferente densidad. La simulación muestra la viabilidad del modelo para determinar por separado las demandas de fuerza en las diferentes partes del subsolador. Posibilita además establecer el patrón de tensiones en dirección vertical sobre las partículas en el piso de labranza.
Palabras clave: Labranza; predicción; fricción; compactación; apero
INTRODUCCIÓN
En la actividad agrícola, el subsolador se emplea para el laboreo de las capas profundas del suelo. El mismo se caracteriza por una estructura robusta y alta demanda de energía. Fue diseñado con el fin de combatir la compactación provocada por el paso de la maquinaria entre otros factores. No obstante, debido a que durante la labranza no invierte el prisma de suelo, su uso contribuye además a prevenir la erosión, la mineralización, y la degradación del suelo en forma general (Zheng et al., 2017).
La formación de capas endurecidas en el interior del área cultivable del suelo, se asocia comúnmente con el arado de vertederas. Para romper estas formaciones se necesita una operación de subsolado profundo para restaurar la productividad del suelo, lo que posibilita la infiltración de agua, el desarrollo radicular y la aireación del suelo. Los estudios sobre el proceso de descompactación se han centrado en los requerimientos en términos de fuerza de tiro, destinados a optimizar el diseño de la herramienta. Los mismos están motivados por la necesidad de reducir la energía consumida en relación con el diseño de la herramienta así como la selección adecuada de los parámetros operacionales seleccionados (Zheng et al., 2016; Li et al., 2017). El suelo agrícola se caracteriza por no tener una densidad aparente homogénea en las diferentes capas, algunos autores han relacionado la densidad del mismo con su composición mineral, los factores agro físicos circundantes y la carga sistemática adquirida como resultado de las operaciones de transporte y labranza (Morris et al., 2010; Li et al., 2016b).
Con el empleo del Método de los Elementos Finitos (FEM), se reportan resultados satisfactorios en la modelación de la resistencia estructural de la herramienta y la fuerza de tracción en condiciones estáticas. Estos resultados han mostrado las potencialidades de los modelos FEM para su empleo en los cálculos basados en la presión pasiva del suelo (Tadesse, 2004). Sin embargo, este método resulta inestable para modelar flujos de partículas y formación de grietas, lo que caracteriza las operaciones de labranza de suelo. Por el contrario, los modelos implementados en los Métodos de Elementos Discretos (MED) se han utilizado con éxito para simular el flujo de material granular, basado en la interacción entre los elementos en contacto y el efecto de las fuerzas resultantes. Mediante el MED se describe el comportamiento dinámico y discontinuo de las partículas del suelo y su interacción con cuerpos sólidos en movimiento (Mak et al., 2012; López, 2014; Ding et al., 2017; Hang et al., 2017).
La presente investigación tiene como objetivo emplear el MED para predecir la demanda de fuerza y el comportamiento de las partículas de suelo, mediante la simulación de operaciones de subsolado a diferentes niveles de compactación y diferente diseño del subsolador.
MÉTODOS
Para modelar la interacción entre el suelo y la herramienta de labranza se empleó el software DEMeter++Tijskens et al. (2003), el cual se basa en el modelo de contacto clásico propuesto por Cundall (1988). Para calcular las fuerzas de contacto entre las partículas del suelo y el cuerpo de la herramienta se desarrolló un modelo explícito de interacción basado en el criterio de falla del suelo de Mohr-Coulomb. El mismo define la solución de contactos a nivel de partículas y está compuesto por la fuerza normal, fuerza de corte, fuerza de cohesión y fuerza de fricción. La rigidez en la dirección normal y tangencial se calculó en función del criterio del mejor ajuste para relacionar las propiedades elásticas del suelo con la geometría de las partículas en contacto. Los parámetros que identifican las propiedades macroscópicas del suelo y herramienta en el modelo fueron: módulo de Young (E), Coeficiente de Poisson (n), ángulo de friction interna (f), ángulo de fricción suelo-acero (d), cohesión del suelo (c) y adherencia (c a ). La formulación del modelo, la calibración y la validación se describieron en detalle en la implementación del modelo de predicción para la labranza del suelo sin inversión (López, 2014).
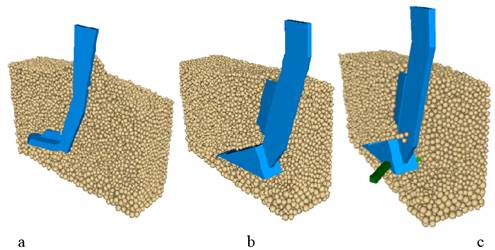
Para la simulación de las operaciones de subsolado, se emplearon dos diseños de herramientas denominadas subsolador simple y subsolador de saetas (Figura 1). La diferencia radica en el incremento de la complejidad al agregar diferentes partes a la estructura básica. La Figura 1a muestra la geometría del subsolador simple que posee una reja prismática y una cuchilla dispuesta de forma vertical. El subsolador de saetas por su parte cuenta con dos saetas de corte lateral y una cuchilla frontal (Figura 1b). Se empleó además una modificación al subsolador de saetas denominada subsolador de cuchilla (Figura 2b).

El bloque de suelo se dimensionó a 350 mm de ancho por 350 mm de alto con una longitud de 600 mm. Las partículas se dividieron en tres grupos con radio promedio de 3,5, 5,0 y 7,0 mm respectivamente, para un total de 45 000 partículas esféricas. La densidad micro del bloque de suelo compactado se definió a la humedad de 9% para un valor de 1,3 g/cm3. Para la modelación del hardpan o capa endurecida en el suelo blando se define la humedad con un valor de 12% para una densidad aparente de 1,0 g/cm3, mientras que para la sección endurecida se establece 1.35 g/cm3. Estas condiciones fueron seleccionadas considerando la variación en la densidad aparente y las propiedades mecánicas utilizadas como macro-parámetros del modelo, las cuales se muestran en la Tabla 1. Por su parte, la distribución de la fuerza sobre las partículas de suelo se generó a la profundidad máxima de labranza o piso de arado; la misma se obtuvo para condiciones de suelo blando y compactado, según los parámetros del modelo.
RESULTADOS Y DISCUSIÓN
Descompactación del suelo
El movimiento del subsolador, en la sección longitudinal del interior del bloque de suelo, muestra el patrón de movimiento de las partículas durante la simulación para los tres diseños de subsoladores empleados (Figura 2). En los mismos, se puede apreciar el desplazamiento de las capas provocado por el movimiento de traslación de la herramienta, donde las partículas se reacomodan después del corte en posiciones relativamente cercanas a la posición inicial. En la simulación del subsolado no se aprecia la inversión de capas de suelo. El desplazamiento de las partículas se incrementa en las situadas en la capa superficial del bloque de suelo, las que poseen mayor grado de libertad.
Como se muestra en el gráfico de la demanda de fuerzas de tracción (Figura 3), en todos los casos la fuerza se estabiliza después de un recorrido de 30 cm, lo cual coincide con la longitud de la cuña de la herramienta. La fuerza de tracción para los tres casos, se mantiene en valores promedios entre 1,3 y 1,8 kN, lo cual es consistente con la resistencia que ofrece el suelo en condiciones de compactación. La diferencia mayor entre los valores obtenidos se observa entre el subsolador simples respecto al de saetas, con un incremento de 450 N respecto al valor promedio. Se evidencia además, que la menor demanda la ejerce el subsolador simple, mostrando que la demanda de tracción durante las operaciones de subsolado se incrementa en correspondencia con el aumento del ancho de trabajo. Estos resultados concuerdan con los obtenidos en estudios realizados por otros autores, los cuales reportan considerable aumento de la fuerza de tiro con el aumento del perfiles de la herramientas de labranza (Li et al., 2017; Ucgul et al., 2017).

No obstante a los valores de tracción obtenidos, es de notar que la descompactación realizada por el subsolador de saetas es al menos dos veces mayor que la removida por los demás, mientras que el aumento en la tracción es sólo del 25%, lo que hace la inclusión de las saetas al diseño más conveniente desde el punto de vista energético. Las magnitudes obtenidas como resultado de la modelación para las diferentes condiciones están en correspondencia con los resultados obtenidos por Li et al. (2016), obtenidas mediante el empleo de ecuaciones empíricas para el cálculo de los esfuerzos en implementos de corte vertical.
Simulación del subsolado de la capa endurecida de suelo o hardpan
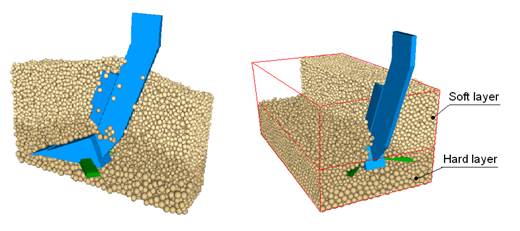
Como se muestra en la Figura 4, el subsolador de saetas es empleado en el modelo de descompactación de la capa endurecida de suelo o hardpan. Para posibilitar el análisis de la distribución de las fuerzas, el cálculo se dividió entre la resistencia que demanda el cuerpo principal y la resistencia de las saetas laterales. Son estas las que se desplazan a través de la capa endurecida de suelo e imponen el patrón de movimiento a las partículas, las cuales muestran un movimiento vertical durante el corte para ser depositas finalmente sin la inversión del prisma de suelo.
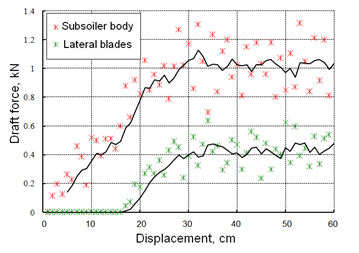
La predicción de la fuerza de tracción del cuerpo principal del subsolador se muestra en la Figura 5 independiente a las fuerzas obtenidas en las saetas laterales. Como consecuencia de la adición de estas al cuerpo principal aumenta la demanda de fuerza un promedio de 0,42 kN. Por su parte, el área de trabajo aumenta tres veces, en tanto la fuerza de tracción solo crece en un 30%. Esta diferencia, desde el punto de vista energético, puede explicarse a partir de que el trabajo realizado por la cuña del implemento es mayor debido a sus dimensiones, aumentando así la demanda de fuerza para su desplazamiento.
No abundan en la literatura modelos donde el suelo se considere un elemento no homogéneo, como es el caso del hardpan, donde se encuentra la formación de al menos dos capas con distintas propiedades. Autores como Mouazen y Neményi (1999), desarrollaron un modelo en elementos finitos para la simulación de la demanda de fuerza en diferentes geometrías de implemento y concluyen que los resultados más precisos se encontraron cuando los suelos se consideraron con una estructura no homogénea.
Distribución de tensiones en las partículas
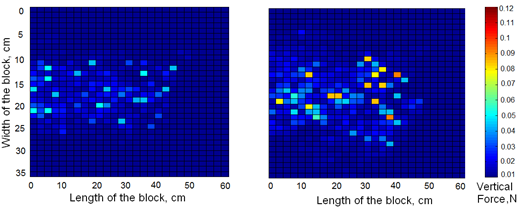
La fuerza en sentido vertical ejercida por el subsolador sobre las partículas se muestran en la Figura 6. En la misma se muestran los patrones de tensión en condiciones de suelo suelto y compactado en la capa que corresponde al piso de arado. Los resultados de la simulación muestran el aumento de la presión vertical en el suelo asociado a la densificación del mismo. Para las condiciones de suelo compactado se incrementan considerablemente el número de partículas bajo presión y los valores máximos se encuentran en la zona de contacto con el implemento (Figura 6b).
Estos resultados están en correspondencia con los obtenidos por Zhao y Zang (2017), donde los autores describen la dinámica de la interacción del suelo a diferentes densidades, así como el efecto de la geometría del implemento. Según se muestra en el patrón de distribución de fuerzas, las condiciones de suelo definen los valores de presión sobre el mismo a diferentes profundidades, lo que puede alterar de forma permanente la compactación del mismo. Sin embargo la formación del hardpan tiene lugar por la labranza reiterada sobre la misma capa de suelo, por lo que la intensidad de las presiones se convierte en un factor que puede acelerar el proceso de formación de las capas endurecidas, las que son más propensas en suelos pesados.
CONCLUSIONES
La fuerza de tiro obtenida mediante la simulación, es modificada de forma considerable con el cambio de la geometría del subsolador. Mediante la adición de saetas de corte lateral, el ancho de trabajo se incrementó al menos dos veces, en tanto la fuerza de tiro sólo aumentó un 25%, lo que muestra una mejor eficiencia desde el punto de vista energético. Por otro lado, el empleo de un bloque no homogéneo, con diferentes densidades de suelo, posibilitó la modelación del hardpan donde se realizó la medición independiente de las tensiones en el cuerpo y en las saetas. Finalmente, la distribución de las fuerzas en dirección vertical se obtuvo mediante el análisis del estado tensional del piso de arado, donde la fuerza sobre las partículas incrementó en el suelo más compactado así como el área de la huella de tensión del subsolador.
REFERENCE
CUNDALL, P.A.: “Formulation of a three-dimensional distinct element model-Part I. A scheme to detect and represent contacts in a system composed of many polyhedral blocks”, International Journal of Rock Mechanics and Mining Sciences, 25(3): 107-116, 1988, ISSN: 0148-9062. [ Links ]
LI, B.; CHEN, Y.; CHEN, J.: “Modelling of soil-claw interaction using the discrete element method (DEM)”, Soil and Tillage Research, 157: 177-185, 2016, ISSN: 0167-1987. [ Links ]
DING, Q.; J. REN; B. E. ADAM; J. ZHAO; S. GE y Y. LI: "DEM Analysis of Subsoiling Process in Wet Clayey Paddy Soil", Transactions of the Chinese Society for Agricultural Machinery, 48(3): 38-48, 2017, ISSN: 1000-1298. [ Links ]
HANG, C.; Y. HUANG y R. ZHU: "Analysis of the movement behaviour of soil between subsoilers based on the discrete element method", Journal of Terramechanics, 74: 35-43, 2017, ISSN: 0022-4898. [ Links ]
LI, B.; X. WANG; R. XIA; J. CHEN y Z. YANG: "Mechanism of reducing force and tillage performance analysis of bionic subsoiler based on discrete element method", International Agricultural Engineering Journal, 26(3): 27-36, 2017, ISSN: 0858-2114. [ Links ]
LI, B.; R. XIA; F. Y. LIU; J. CHEN; W. T. HAN y B. HAN: "Determination of the draft force for different subsoiler points using discrete element method", International Journal of Agricultural and Biological Engineering, 9(3): 81-87, 2016b, ISSN: 1934-6344. [ Links ]
LÓPEZ, B.E.: “Prediction model for non-inversion soil tillage implemented on discrete element method”, Computers and Electronics in Agriculture, 106: 120-127, 2014, ISSN: 0168-1699. [ Links ]
MAK, J.; Y. CHEN y M. A. SADEK: "Determining parameters of a discrete element model for soil-tool interaction", Soil & Tillage Research, 118: 117-122, 2012, ISSN: 0167-1987. [ Links ]
MORRIS, N. L.; P. C. H. MILLER; J.H.ORSON y R. J. FROUD-WILLIAMS: "The adoption of non-inversion tillage systems in the United Kingdom and the agronomic impact on soil, crops and the environment-A review", Soil and Tillage Research, 108(1-2): 1-15, 2010, ISSN: 0167-1987. [ Links ]
MOUAZEN, A.M.; NEMÉNYI, M.: “Finite element analysis of subsoiler cutting in non-homogeneous sandy loam soil”, Soil and Tillage Research, 51(1-2): 1-15, 1999, ISSN: 0167-1987. [ Links ]
TADESSE, D.: Evaluating DEM with FEM perspectives of load soil-interaction, 231pp., Philosophical Doctor, Wageningen University, 2004. [ Links ]
TIJSKENS, E.; H. RAMON y J. D. BAERDEMAEKER: "Discrete element modelling for process simulation in agriculture", Journal of Sound and Vibration, 266(1): 493-514, 2003, ISSN: 0022-460X. [ Links ]
UCGUL, M.; C. SAUNDERS y J. M. FIELKE: "Discrete element modelling of tillage forces and soil movement of a one-third scale mouldboard plough", Biosystems Engineering, 155: 44-54, 2017, ISSN: 1537-5110. [ Links ]
ZHAO, C.L.; ZANG, M.Y.: “Application of the FEM/DEM and alternately moving road method to the simulation of tire-sand interactions”, Journal of Terramechanics, 72: 27-38, 2017, ISSN: 0022-4898. [ Links ]
ZHENG, K.; J. HE ; H. LI; P. DIAO; Q. WANG y H. ZHAO: "Research on polyline soil-breaking blade subsoiler based on subsoiling soil model using discrete element method", Transactions of the Chinese Society for Agricultural Machinery, 47(9): 62-72, 2016, ISSN: 1000-1298. [ Links ]
ZHENG, K.; J. HE; H. LI; H. ZHAO; H. HU y W. LIU: "Design and Experiment of Combined Tillage Implement of Reverse-rotary and Subsoiling", Transactions of the Chinese Society for Agricultural Machinery, 48(8): 61-71, 2017, ISSN: 1000-1298. [ Links ]
Recibido: 12 de Mayo de 2018; Aprobado: 25 de Febrero de 2019
 This is an open-access article distributed under the terms of the Creative Commons Attribution License
This is an open-access article distributed under the terms of the Creative Commons Attribution License
