










 Serviços customizados
Serviços customizados texto em
texto em  Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkINTRODUCTION
In agricultural practices a subsoiler is a tillage tool used for working the deep layers in the soil. It is characterised by a robust structure and being a large power consumer. This implement was designed to fight against compaction, however, the non-inversion capacity of the tool also contributes to prevent erosion and soil degradation (Zheng et al., 2016; Li et al., 2017).
Hardpan formation is commonly associated with mouldboards ploughing. To disrupt the hardpan layer a special tillage operation of subsoiling is needed in order to restore the soil productivity by growing water infiltration, root development and soil aeration. Several studies have focused on tillage force requirements aimed to optimize the tool design. They are motivated by the need to reduce the energy consumed where the soil physical state, the tool geometry, and the selected operational parameters play an important role (Zheng et al., 2017). No homogenous bulk density is generally found at the different soil layers. Several studies have been related to the degree of densification with the soil mineral composition, physical factors, and systematic loading by transporting and tillage operations (Morris et al., 2010; Li et al., 2016b).
On the other hand, numerical models have been implemented taking account for the tool geometry, leading to numerical solutions for tillage applications. Using Finite Element Models (FEM), several authors reported satisfactory results related to the tool structural resistance and tillage force demanded. These results showed the advantages of the FEM models with regard to analytical calculations based on soil passive pressure. FEM was found suitable for a continuum analysis under static conditions of soil and tool interaction (Tadesse, 2004). However, this method results unstable for modelling particle flows and crack formation. On the contrary, the models implemented on Discrete Element Methods (DEM) were successfully used to simulate the flow of granular material based on the interaction of the forces among elements in contact, describing the discontinuous dynamical behaviour of the particles. However, only a few attempts were made when using DEM for tillage operations (Mak et al., 2012; López, 2014; Ding et al., 2017; Hang et al., 2017).
The present investigation aims to simulate soil subsoiling at different levels of soil compaction using different designs of the tools in order to predict the draft force requirements.
METHODS
The dynamics of soil and tool interaction was implemented using the DEM software DEMeter++ (Tijskens et al., 2003), based on the classic model proposed by Cundall (1988). In order to calculate the interaction between soil particles and tillage tool, an explicit contact model was developed using the Mohr-Coulomb criterion of soil failure. The model, at the particle level, deals with normal force, shear force, cohesion force and friction force. The stiffness in normal and tangential direction were calculated based on the equation of the best fit to relate soil elastic properties with the geometry of the particles.in contact. The soil and tool parameters used by the model were: Young’s modulus (E), Poisson’s ratio (n), internal friction angle (f), soil-steel friction angle (d), soil cohesion (c) and adhesion (c a ). Model formulation, calibration and validation were described in detail on the implementation of prediction model for non-inversion soil tillage (López, 2014).
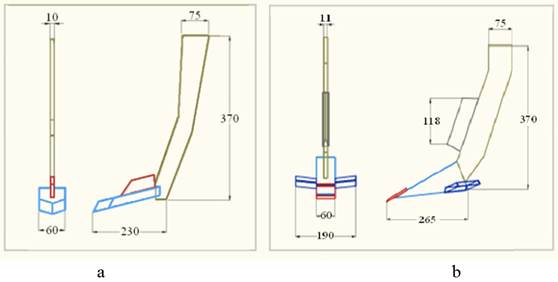
Three-tool designs called simple, knife and blade subsoiler were used to perform simulations of soil de-compaction. The geometry of the tools was increased in complexity by adding different parts to the basic structure. Figure 1a shows the geometry of the simple subsoiler, the shape of the knife subsoiler having the same structure as the blade one (Figure 1b), but without lateral blades.
The soil block was sized at 350x350x600 mm and particles size were divided in three sets with the average radios at 3.5, 5.0 and 7.0 mm for a total of 45 000 spherical particles. Micro-density was the same for compacted soil block defined at w = 9 % and rd = 1.3 g/cm3. For hardpan, however, soft soil section is defined at w = 12% and rd = 1. 0 g/cm3, while harden soil section is defined at w = 12%, rd = 1.35 g/cm3. These conditions were selected considering the variation in dry bulk density. The mechanical properties used as model macro-parameters are shows in Table 1. On the other hand, the force distribution on the soil particles was generated at the maximum depth of tillage or plowing floor; it was obtained in soft and compacted soil conditions, according to the parameters of the model.
RESULTS AND DISCUSSION
Soil De-compaction
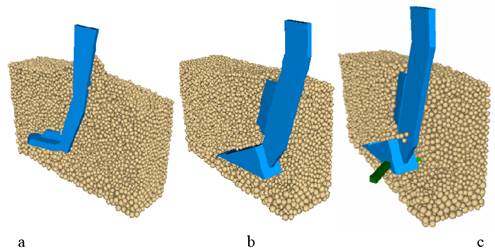
The movement of the subsoiler, in the longitudinal section of the soil block, shows the movement pattern of the particles during the simulation for the three designs of subsoiler used (Figure 2). It shows the displacement of the layers caused by the translation of the tool. The particles are rearranged after cutting, in a position relatively close to the initial one, and the inversion of soil layers is not appreciated. The displacement of the particles increases in those located in the surface layer of the soil block, which have a greater degree of freedom.
The chart of draft forces for each simulation shows a small increment on the knife subsoiler with respect to the simple one (Figure 3). The difference is probably caused by the increase in rake angle of 12º for the knife subsoiler with respect to simple one. This result is in agreement with other authors (Li et al., 2017; Ucgul et al., 2017). The blade subsoiler however, demands around 450 N more than the simple one, suggesting that the force demanded during soil de-compaction increases also according to the subsoiler frontal scope defined by the width of the tool.
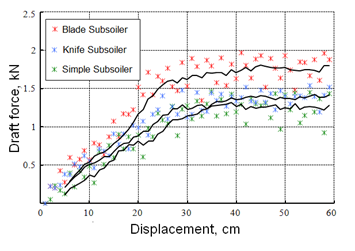
However, the work performed by the blade subsoiler, with respect to the soil disturbed area, is almost two times larger compared to the simple and knife subsoilers, while the draft force only grew around 25% . For this reason the blade subsoiler is more interesting from the energy point of view. The magnitudes of the forces obtained from the simulation are consistent with the results obtained by Li et al. (2016), predicted from empirical equations tillage draft for narrow tools in relation with the soil physical conditions.
Simulation of soil hardpan disruption
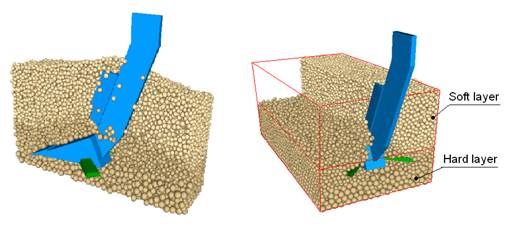
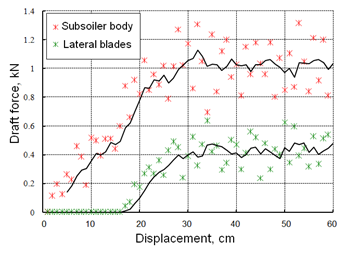
As shown in Figure 4, the bolt subsoiler is employed in the de-compaction model of the hardened soil layer or hardpan. To enable the analysis of the force distribution, the calculation was divided between the resistance demanded by the main body and the one by lateral arrows. These are the ones that move through the hardened layer of soil and impose the movement pattern on the particles. The results shows a vertical movement of the soil particles during the cutting to be finally deposited without the inversion of the soil prism.
The draft force prediction from the subsoiler main body and the blades are shown in Figure 5. A total force of 0.42 kN results from the addition of the blades to the original subsoiler geometry. The addition of the lateral blades increases almost three times the width of the tool, increasing the disrupting action over the hardpan while the draft force rises only close to 30%. Nevertheless, the soil disruption caused by the lateral blades, should be lower than the area disrupted by the central wedge.
A few investigations using numerical methods have been dedicated to modelling soil-tool interaction, considering the non-homogeneous nature of soil. Focused on that goal Mouazen and Neményi (1999), presented a FEM model to simulate the force demanded for several subsoilers. They concluded that more accurate draft force predictions are obtained employing a non-homogeneous soil structure. Accordingly, the DEM draft force results presented in Figure 5, predict with more fidelity the required forces in real soil hardpan disruption.
Particle force distribution
Vertical forces, calculated over soil particles placed at the tillage depth are graphically represented in Figure 6; the subsoiler was stopped at 45 cm travel in both cases. The contact surface of soil defined as soft (Fig 6a) and compacted (Fig 6b) shows the soil section susceptible to be deformed in permanent way and compacted by the tool vertical pressure.
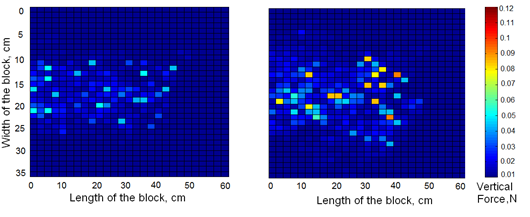
The results from simulations demonstrate a rise in vertical forces associated with the level of soil density. For the simulation in soil compacted condition, the amount of particles submitted to pressure also increase and some maximum values are obtained at the current tool position (Figure 6b). This result agrees with those obtained by (Zhao y Zang, 2017) where the authors focused on the simulation of soil and tire interaction. According to the force distribution pattern getting from the simulation, soil condition at tillage defines the level of vertical pressures asserted over soil at depth of tillage. Although, hardpan resulting from repetitive tillage, the soil states becomes an important factor in accelerating the formation of hard structure, specialty for compacted soil.
CONCLUSIONS
The simulated draft force is modified by the differences in the shape of the subsoiler. The draft force demanded by the frontal knife remains small compared to the simple tool, despite the bigger rake angle of the chisel. By adding lateral blades to the subsoiler wedge, the disrupted area is increased almost twice whereas the horizontal force increases only 25%. On the other hand, soil hardpan disruption can be modelled using two sections in the same virtual block of soil with different soil strength and dry bulk density. The prediction of draft forces, measured on the main tool body and lateral blades, independently, allows evaluating the geometrical changes in the tool design in contrast with the desired expansion of soil disruption. Finally, the vertical force distribution on the layer below the tool path, in the soil virtual block during the simulation increases for the compacted soil condition compared to the soft soil. The intensity of the force on particles and the area under pressure typify the loading condition by the tool shape and soil physical state.

