










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Más de mil millones de personas de la población mundial, padece alguna forma de discapacidad. La discapacidad es una condición que afecta el nivel de vida de un individuo o de un grupo (Organización Mundial de la Salud, 2020). Esta puede ser adquirida durante su gestación, nacimiento, infancia o cualquier otra etapa de vida. La discapacidad se manifiesta por limitaciones significativas en el funcionamiento intelectual, motriz, sensorial (vista y oído) y conducta adaptativa.
De acuerdo con la Organización Mundial de la Salud (2020), los tipos de discapacidad está organizada en dos niveles: grupo y subgrupo. El primer nivel está formado por cinco grupos: grupo 1 Discapacidades sensoriales y de la comunicación; grupo 2 Discapacidades motrices; grupo 3 Discapacidades mentales; grupo 4 Discapacidades múltiples y otras; grupo 9 Claves especiales (Kazou, 2017).
Actualmente existen algunas ayudas tradicionales para la movilidad de personas con discapacidad visual en exteriores como: el bastón blanco y los perros guía (Sourab, et al., 2015). Y otras ayudas tecnológicas propuestas, no tradicionales basadas en: el Internet de las cosas (IoT) (Guerrero-Ulloa, et al., 2019), Sistemas Embebidos (SE) (Sandoval-Pillajo, et al., 2019), uso de GPS para el posicionamiento en exteriores, entre otras aplicaciones que buscas en la construcción de aparatos y/o implementos solventar la primera necesidad que es la detección de obstáculos con componentes electrónicos y evitar lesiones al contacto con obstáculos; como valor agregado el uso GPS, que identifica la posición inicial y a partir de ahí generar una ruta.
Para las personas con discapacidad de movilidad, se ha propuesto ruedas inteligentes con control y navegación transferida a un agente robótico quien "asiste según sea necesario"(Pushp, et al., 2018).
Otros trabajos de ayudas en distrofia muscular (Doyle-Kent, et al., 2019), basados en la robótica y el control de la cinemática directa e inversa para el control de los movimientos y control de trayectoria en brazos robóticos.
Los trabajos existentes antes mencionados, hasta donde se conoce, buscan ser aplicativos livianos con identificación de obstáculos, no invasivos, de bajo costo, con diseños ergonómicos; sin embargo, tienen algunas limitantes ya que se centraron en recursos tecnológicos para sistematizar procesos de navegación, información de rutas, acceso a preferencias de los usuarios, entre otros aspectos, además se concentraron en un tipo específico de discapacidad; por lo que, es necesario la identificación de nuevos retos, oportunidades y tendencias de la aplicación de arquitecturas y programación con miras al desarrollo de sistemas autónomos más robustos, eficientes y precisos.
Aunando a lo anterior se puede decir que hoy las ayudas apoyadas en la tecnológico, fundamentalmente en: la Inteligencia artificial (IA), Seguridad informática, Big Data, Robótica, Internet de las cosas (IoT), entre otras, está imponiendo la necesidad de utilizar nuevos paradigmas de hardware (componentes electrónicos) y software (técnicas de programación), como alternativas para alcanzar un alto rendimiento en determinadas aplicaciones informáticas.
El objetivo de este trabajo es realizar una revisión sistemática de literatura para obtener información actualizada de trabajos realizados sobre enrutamiento inteligente para usuarios con discapacidad.
Materiales y métodos
La metodología seleccionada para la presente revisión sistemática de literatura fue la propuesta por (Kitchenham & Charters, 2007). El protocolo de revisión se presenta en la Figura 1 y constó de cuatro pasos: (i) Preguntas de Investigación, (ii) búsqueda de documentos, (iii) selección de artículos, (iv) extracción de datos relevantes. A continuación, se explica cada una de las fases:
Se establecieron tres preguntas de investigación (Tabla 1), las cuales son las directrices en el proceso de revisión sobre el tema de estudio. Se consideraron dos bases de datos científicas a las cuales se tiene acceso en la Universidad Uniandes, las cuales son las siguientes: Scopus y SpringerLink.
Tabla 1 - Preguntas de investigación.
| N° | Motivación | Pregunta |
|---|---|---|
| P1 | Identificación de los tipos de discapacidad | ¿Qué tipo de discapacidades han sido atendidas/ o se han desarrollado aplicaciones? |
| P2 | Identificar las tareas que realizan los enrutadores inteligentes | ¿Qué tareas pueden desarrollar los enrutadores? |
| P3 | Mejorar los tiempos de respuesta en la sugerencia de rutas. | ¿Qué técnicas de algoritmos se utilizan para identificación de rutas? |
Para la búsqueda de los documentos se utilizó como cadena de búsqueda base: “route" OR "planning” AND "disability*" OR "less able" AND "outdoor", Se usaron algunas variantes en las cadenas de búsqueda para obtener, al menos, 10 documentos en cada base de datos bibliográfica. La Tabla 2 presenta las cadenas de búsqueda en cada base de datos y las combinaciones utilizadas considerando que las bases de datos tienen criterios y capacidades de búsqueda diferentes. Un total de 298 documentos fueron encontrados de los cuales 61 pertenecen a Scopus, 238 a Springer.
Tabla 2 - Cadenas de búsqueda utilizadas en las bases de datos científicas.
| Base de Datos | Instrucción de búsqueda | Cantidad de artículos |
| Scopus | TITLE ("route” OR “planning”) AND (“disability*” OR “les able”) AND ("outdoor") | 59 |
| Springer | “route" OR "planning” AND "disability*" OR "less able" AND "outdoor" | 238 |
Para la selección de artículos se consideraron tres fases. En la primera fase se aplicaron criterios de inclusión y exclusión. Los criterios de inclusión considerados: (i) artículos científicos, (ii) revisiones, (iii) conferencias evaluadas por pares, (iv) estudios centrados en enrutadores, todos los trabajos relacionados con las disciplinas de ciencias de la computación e ingeniería, publicados durante los últimos 5 años (2015-2020) en idioma inglés. Los criterios de exclusión considerados fueron: (i) trabajos duplicados, (ii) informes técnicos, (iii) tesis, (iv) estudios publicados en otras áreas de conocimiento.
Obteniéndose el siguiente resultado: Springer 19 y Scopus 56, dando un total de 75 artículos.
Finalmente se hizo una revisión del título y del abstract, obteniéndose el siguiente resultado: Springer 5 y Scopus 13, dando un total de 18 artículos.
A continuación, se detalle de los 18 artículos científicos finalmente seleccionados se presenta en la tabla 3.
Tabla 3 Artículos seleccionados.
| Código Título | Título | Base de datos | Año |
|---|---|---|---|
| Art. 1 | The path of least resistance | Springer | 2017 |
| Art. 2 | A review of assistive spatial orientation and navigation technologies for the visually impaired. | Springer | 2017 |
| Art. 3 | Landmark-enhanced route itineraries for navigation of blind pedestrians in urban environment. | Springer | 2018 |
| Art. 4 | Hefestos: an intelligent system applied to ubiquitous accessibility. | Springer | 2016 |
| Art. 5 | Right mix of speech and non-speech: hybrid auditory feedback in mobility assistance of the visually impaired. | Springer | 2015 |
| Art. 6 | Transit route network design for low-mobility individuals using a hybrid metaheuristic approach. | Scopus | 2020 |
| Art. 7 | An innovative system to assist the mobility of people with motor disabilities. | Scopus | 2019 |
| Art. 8 | WalkBot: A portable system to scan sidewalks. | Scopus | 2019 |
| Art. 9 | Distinguishing road surface conditions for wheelchair users. | Scopus | 2019 |
| Art. 10 | WheelShare: Crowd-Sensed Surface Classification for Accessible Routing. | Scopus | 2019 |
| Art. 11 | Human-Machine Interface for a Smart Wheelchair. | Scopus | 2019 |
| Art. 12 | Path Planning in Support of Smart Mobility Applications Using Generative Adversarial Networks. | Scopus | 2018 |
| Art. 13 | GAWA - Manager for accessibility Wayfinding apps | Scopus | 2017 |
| Art. 14 | Social navigator: Implementation of the software infrastructure of route planning for people with disabilities. | Scopus | 2017 |
| Art. 15 | Towards Human Smart Cities: Internet of Things for sensory impaired individuals. | Scopus | 2017 |
| Art. 16 | A positioning system with RFID tags and QZSS for navigating the visually impaired. | Scopus | 2016 |
| Art. 17 | Ray: Smart Indoor/Outdoor Routes for the Blind Using Bluetooth 4.0 BLE | Scopus | 2016 |
| Art. 18 | Design and development of a mobile sensor based the blind assistance wayfinding system. | Scopus | 2015 |
Los 18 trabajos finalmente seleccionados (Tabla 3), fueron revisados y los datos extraídos de los artículos se obtuvieron de acuerdo con las preguntas directrices que dirigen esta investigación.
Resultados y discusión
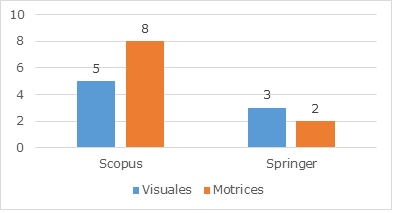
Las discapacidades atendidas en este estudio fueron: visual y motrices.
Visual: Los desafíos que a diario enfrenta una persona ciega, han sido motivo de investigaciones, levantamiento de datos, encuestas (Fernandes, et al., 2019), estudio basados en ayudas que permita identificar con antelación los obstáculos en su camino (Ajmi, et al., 2019), y planificar rutas adecuadas en interiores como en exteriores (Edinger, et al., 2019), ya sea haciendo uso de herramientas móviles (Tavares, et al. 2016), y con el apoyo del geoposicionamiento (Balata, et al., 2018), se puede obtener una posición inicial y a partir de ella se puede dirigir a la persona a un sitio de referencia, también se han utilizado audios para la dirección (Hussain, et al., 2015).
Motrices: Estudios presentados en varios grados de discapacidad motriz, las investigaciones se centran en mejorar los diseños (Ohashi et al., 2019) y crear prototipos implementando más componentes electrónicos a la silla y otros acoples para lograr mejorar la situación de vida de quien padece este impedimento de movilidad, así también otras investigaciones utilizan la realidad virtual como alternativa para visualizar con antelación el estado de las vías antes de acceder a ellas, acceder a información en tiempo real permiten crear enrutadores perfectos (Edinger, et al., 2019) otros estudios presentan propuestas de accesibilidad con experimentos prácticos (Zhang, et al. 2020).
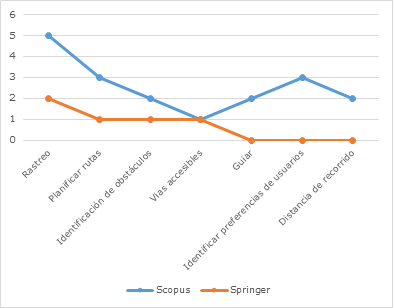
Los enrutadores inteligentes, incluye tareas como: rastrear la posición del usuario, planificar rutas viables, dinámicas, sin obstáculos (Ajmi, et al., 2019), accesibles (Kulakov, et al., 2017; Edinger, et al., 2019) y guiar al usuario a través de las rutas para llegar al destino final deseado considerando las preferencias del usuario más que la distancia.
Los métodos más utilizados para la planificación de rutas son el algoritmo A*(Blower & MacDonald, 2014), el algoritmo de Dijkstra, el algoritmo D* y el algoritmo de Floyd. Además, existen algunos sistemas que proporcionan navegación sin mapas; otras investigaciones utiliza la asignación de pesos a diferentes tipos de bordes y nodos para controlar el cálculo de la ruta en diferentes áreas al aire libre o interiores , otro algoritmo es el de planificación de rutas utilizan gráficos o cuadrículas para representar el entorno, en esta investigación también aplica pesos para identificarlos (Fernandes, et al., 2019), el algoritmo sistema métrico, y los algoritmos de localización Landmarks (Balata, et al., 2018), algoritmo de triangulación WIFI calcula la ubicación.
También están los algoritmos metaheurísticos basados en algoritmos genéticos, y los de colonias de hormigas, que han demostrado ser un método flexible y práctico para redes de tránsito a un costo computacional razonable.
Los artículos analizados en la revisión literaria, en su mayoría se han desarrollado en el año del 2019, experimentando su punto más alto, en los años anteriores y posterior mantiene un índice bajo moderado (Tabla 3, Figura 1).

En la figura 2, se puede evidenciar que las discapacidades atendidas son las motrices y visuales; en los artículos analizados en la revisión literaria en su mayoría, hacen referencia a: motrices para scopus y visuales en Springer.
Respecto a las tareas atendidas, en los estudios revisados, han sido el rastreo como tarea importante, seguida de la planificación de rutas accesibles y viables para quien la necesita, continua con la identificación de preferencias del usuario y guiar de inicio a fin de la ruta; otras tareas contempladas y no en menor importancia están la identificación de obstáculos, identificación de vías, aceras, y la distancia de recorrido (Figura 3).
Respecto a los algoritmos implementados han sido varios, pero la mayoría utiliza de basa los: A*, metaheurísticos, Dijkstra, el algoritmo D* adicional cada investigación se acompaña de otros para lograr precisión y exactitud de la ubicación de lugares ya sean en interiores o exteriores, identificación de obstáculos y escenarios, y la ponderación para validar dichos entornos.
Conclusiones
En su mayoría los artículos analizados se centran en el desarrollo de ayudas basadas en aplicaciones móviles, GPS, obtención de rutas desde los GPS; la incorporación de componentes electrónicos para proporcionar, informar la presencia de obstáculos y el acceso a rutas libres y accesibles.
La utilización de técnicas de algoritmos para recomendar las mejores rutas basadas en las preferencias de los usuarios ha sido sin duda una de las innovaciones más relevantes en los estudios y un aporte significativo, y es en donde se puede encontrar un gran potencial para seguir inquiriendo y generando nuevas investigaciones.
Las personas con discapacidad son una parte esencial y los gobiernos hacen esfuerzos para integrarlos a la población económicamente activa, por lo que la autonomía y la independencia, son valores claves en exteriores, especialmente porque el acceso y la movilidad son dimensiones importantes de la calidad de vida de todo ser humano.

