ARTÍCULO ORIGINAL
Instrumento virtual con acceso local y remoto para prácticas de Ingeniería del Control
Local and remote access virtual instrument for control engineering laboratory practice
]]>
MSc. Orlando Regalón Anias, MSc. Vladímir Rodríguez Diez, Dra. C. Milagros Diez Rodríguez, Ing. Raúl Báez Prieto, Ing. Leisis López Rodríguez, Ing. Francisco Pacheco BallagasDepartamento Ing. Eléctrica de la Facultad Electromecánica, Universidad de Camagüey, Camagüey, Cuba.
RESUMEN
Ingeniería del Control es la primera asignatura que se imparte a los estudiantes de Ingeniería Eléctrica, en el marco de la disciplina de Accionamientos Eléctricos. Ella se concentra en el estudio de la teoría de control continuo y discreto, enfocada fundamentalmente a los accionamientos de velocidad y posición variable. Sirve de base al resto de las asignaturas de la disciplina y se caracteriza por su marcado contenido teórico. En su enseñanza es muy importante el empleo de las herramientas de simulación.
En este artículo se expone una experiencia desarrollada en la Universidad de Camagüey y ya aplicada en otras universidades cubanas y extranjeras, mediante la creación y aplicación de un instrumento virtual para realizar prácticas de laboratorio simuladas y reales. Con él, los estudiantes pueden corroborar prácticamente los resultados simulados y comprender las relaciones entre los modelos abstractos y los sistemas de accionamientos de velocidad variable o regulación de coordenadas, que se encontrarán durante su desempeño profesional. Este instrumento ha sido concebido para facilitar el acceso remoto, de forma que los estudiantes puedan probar sus resultados en cualquier momento y desde cualquier computadora con conectividad, con aquella que se encuentre directamente instalada al equipamiento real de laboratorio. Para lograr los objetivos de diseño y la diversidad de variantes en el proyecto presentado a los estudiantes, se introduce en el lazo de control una función de transferencia simulada cuya implementación es descrita.
Palabras Clave: Instrumentos virtuales, enseñanza de la ingeniería del control, simulación, transformada Z.
ABSTRACT
Control Engineering is the first subject taught to students of Electrical Engineering in the discipline of Electric Drive. It is focused on the study of the theory of continuous and discrete control, mainly for speed and position controlled drives. This subject constitutes the basis for the rest of discipline and it is characterized by a strong theoretical content. Simulation tools are very important for teaching this subject. ]]>
In this paper, we expose an experience developed at the University of Camaguey and already applied in other Cuban and foreign universities. It consists on the creation and implementation of a virtual instrument for simulated and real laboratory practices. Sing it, students can corroborate simulated results and understand the relationships between abstract models and real controlled drive systems on their professional work. This virtual instrument is designed to facilitate the remote access to students, so they can test their results at any time from any computer with connectivity with the real laboratory equipment. To achieve the design goals and diversity of variants in the project presented to students, a simulated transfer function is introduced into the control loop.Key Words: Virtual instruments, control engineering teaching, simulation, Z transform.
INTRODUCCIÓN
Según el modelo del profesional del plan de estudios «D», un Ingeniero Electricista tiene dos campos de acción fundamentales: las redes eléctricas y las máquinas eléctricas y convertidores electrónicos de potencia. Para el desempeño en esta última área son indispensables los conocimientos que recibe en la disciplina de Accionamientos Eléctricos, la cual, en este plan de estudios, está formada por tres asignaturas obligatorias: Ingeniería del Control, Automatización Industrial - Autómatas y Accionamientos Eléctricos, además de otras opcionales.
La asignatura Ingeniería del Control se imparte en el segundo semestre del tercer año de la carrera, es la primera de esta disciplina y sirve de base para las demás asignaturas que conforman la disciplina. Por estas razones es de gran importancia lograr una motivación adecuada en los estudiantes y que sí adquieran una buena base en los conceptos fundamentales que involucran la automatización.
Esta asignatura tiene un marcado contenido teórico y durante el desarrollo de la misma se imparte a los estudiantes un volumen importante de conceptos apoyándose en el empleo de la simulación. Por otro lado, en planes de estudios anteriores se evaluaba tradicionalmente a través de un examen final teórico, pero a partir de la implantación del plan de estudios «D» el desarrollo de un proyecto de curso constituye su evaluación fundamental. El proyecto de curso tiene necesariamente que pasar por el empleo de la simulación, pero no tiene mucho sentido que quede solo allí. De alguna forma se debe garantizar que se corroboren en la práctica los resultados de la simulación, pero ¿cómo? y ¿con qué? El equipamiento con que se cuenta en los laboratorios, además de obsoleto, no permite mostrar prácticamente la mayoría de los elementos contenidos en el sistema de conocimientos.
Ingeniería de Control consta de cuatro temas. Ellos son: modelos matemáticos dinámicos, análisis de sistemas de control continuos, síntesis de sistemas de control continuos y sistemas de control digitales. Durante los primeros intentos de vincular la teoría con la práctica en la Universidad de Camagüey, se logró bastante bien en el tema I (aunque con dificultades en los instrumentos de medición); para los demás temas no fue posible lograr esta vinculación. ]]>
Como solución a esta problemática se creó y aplicó un instrumento virtual para el desarrollo de prácticas virtuales y reales de control automático 1. Este ha permitido el logro de dos objetivos fundamentales: la visualización práctica de los conceptos fundamentales de la automática aplicada a los accionamientos eléctricos y que los estudiantes corroboren en la práctica los resultados teóricos obtenidos mediante simulación, durante el desarrollo del proyecto de curso. Este instrumento virtual se desarrolló en LabVIEW y ha sido concebido tanto para su empleo local como para que los estudiantes puedan acceder a realizar las prácticas de forma remota2 3 4 5.
MATERIALES Y MÉTODOS
A continuación se describe la concepción de hardware y software para el funcionamiento del instrumento virtual. El software desarrollado incluye la implementación mediante simulación de una función de transferencia, que se adiciona para complejizar la dinámica del lazo de control y así conseguir los objetivos propuestos en la asignatura. Garantiza además la diversidad de variantes para los proyectos de los estudiantes. En la parte final de este artículo se describe cómo fue conseguida la implementación de esta función de transferencia simulada en LabVIEW de forma que fuese fácilmente modificable, para conseguir nuevas variantes en cada año que se imparte la asignatura.
El objeto de Control
En un sistema de control continuo se manipula una (o varias) variable de entrada a una planta con el fin de lograr mantener una (o varias) variable controlada lo más cercana posible a valores deseados. El componente fundamental de una malla de control consiste precisamente en la planta, también llamada objeto de control. En principio este pudiera ser cualquiera, por ejemplo un tanque al que se le quiere controlar su nivel, un horno donde se precisa de garantizar una temperatura, etc.
Al ser impartida la asignatura Ingeniería del Control como parte del programa de la carrera Ingeniería Eléctrica, se enfoca la misma hacia el control de los accionamientos eléctricos. En el tercer año de la carrera los estudiantes se encuentran recibiendo, de forma paralela, Conversión Electromecánica, asignatura en la que estudian la máquina de corriente directa. En años posteriores reciben los conocimientos de máquinas de corriente alterna.
El accionamiento de velocidad variable más común, se implementa con una máquina de corriente directa a la que se le coloca una alimentación de campo constante y se le varía la tensión aplicado a la armadura.
Para ello se puede emplear un convertidor de corriente alterna a corriente directa (CA/CD), en alguna de las configuraciones que se estudian en la asignatura Electrónica de Potencia. El modelo matemático de este objeto de control es bien conocido y se puede consultar en diversas bibliografías 6 7. Aunque físicamente es un sistema de tercer orden, en la práctica sucede con frecuencia que se comporta como un sistema dinámico de primer orden, al ser despreciable la inductancia de armadura así como la constante de tiempo que caracteriza la respuesta del convertidor electrónico. ]]>
Hasta hace solo unos años atrás, los accionamientos eléctricos industriales que requerían velocidad variable eran dominados casi exclusivamente por el empleo de motores de corriente directa. El desarrollo y aplicación de los variadores de velocidad, capaces de garantizar una salida de corriente alterna con tensión y frecuencia variables, ha permitido que cada día sean más empleados accionamientos eléctricos de velocidad variable, con el uso de motores de corriente alterna alimentados por variadores. Desde el punto de vista de su modelo matemático estos conjuntos también se caracterizan por poseer una dinámica de primer orden 8.Por tanto, se puede considerar que para los accionamientos eléctricos de velocidad variable, ya sean con motores de corriente alterna o de corriente directa, se está en presencia de una planta de primer orden sin retardo de transporte. Para extender la aplicación del instrumento virtual aquí descrito, al control de otros procesos industriales como presión, temperatura, nivel, etc., tan solo hay que tener en cuenta que ellos se pueden aproximar con razonable exactitud a sistemas dinámicos de primer orden que incluyen retardo de transporte.
En los laboratorios de accionamientos eléctricos de las universidades cubanas se cuenta con un kit Alecop, que incluye motores de corriente directa y motores de corriente alterna. Además, con estos kit se pueden montar distintas variantes de rectificadores controlados.
Implementación de hardware y software del lazo de control
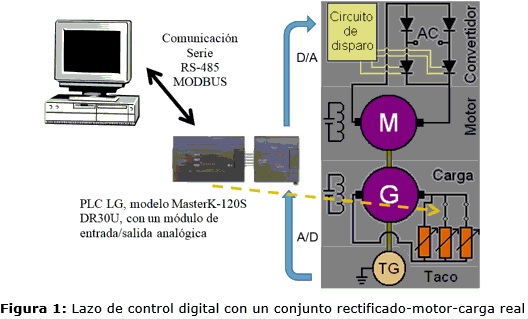
La implementación práctica se puede realizar con una tarjeta de adquisición de datos, un controlador lógico programable (PLC por sus siglas en inglés), un sistema de adquisición a base de microcontroladores, FPGA, etc.9. En la Universidad de Camagüey se ha hecho de la forma mostrada en la figura 1, es decir con un PLC. Este solo juega el papel de interfaz de adquisición de datos y se ha hecho así con dos fines: el primero es lograr mayor flexibilidad ante una posible extensión de la experiencia a otra institución y el otro es para que exista la posibilidad de trabajar el lazo de control de formas real y virtual. Por tanto, las variantes de reguladores y funciones de transferencia simuladas que se explican más adelante, son implementadas en el software que se ejecuta en la computadora y no en el PLC.
El montaje de la figura 1 es muy útil para realizar una explicación y demostración inicial de los conceptos fundamentales de la asignatura, incluyendo los de carga y disturbio y cómo ellos afectan el funcionamiento del sistema de control, ya sea en lazo abierto o lazo cerrado.
Aquí se ha empleado como planta al motor de corriente directa y como carga a un generador de corriente directa al cual se le colocan varias resistencias en paralelo. Pudieran trabajarse otras variantes de objeto de control, pero esta es adecuada para la formación de los ingenieros electricistas y se consigue implementar totalmente con los componentes que integran el kit Alecop. Esta configuración facilita la comprensión del concepto de perturbación o disturbio.
Con este ejemplo se persigue motivar a los alumnos para el estudio de la Ingeniería del Control y para que comprendan su interrelación con otras asignaturas como Electrónica de Potencia, Máquinas Eléctricas, Automatización Industrial y Accionamientos Eléctricos.
Para realimentar la velocidad del conjunto se emplea un tacogenerador. La salida de este típicamente está en el orden de 0 a 60 VCD para los equipos disponibles en el kit Alecop. Haciendo pasar esta señal a través de un divisor y luego por un amplificador de ganancia variable, se puede ajustar esta última para lograr ganancia cercana a la unidad en el lazo. ]]>
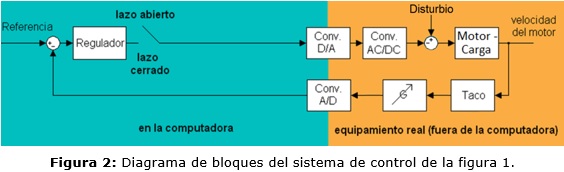
La figura 2 muestra el diagrama de bloques de este sistema de control. Con él se persigue que los estudiantes comprendan claramente qué elementos se encuentran en el mundo analógico y cuáles se implementan dentro del dispositivo de cómputo. Permite enfatizar en las funciones de los convertidores análogo-digital y digital análogo, como interfaz entre ambos.En el caso del regulador se han implementado dos variantes: PID y generalizado en transformada Z de orden 5. Con ellos los estudiantes pueden probar sus diseños tanto continuos como discretos, e incluso probar las versiones discretas de los controladores PID diseñados en forma continua.
El proyecto de curso de la asignatura, evaluación fundamental de la misma, se ha concebido para que los estudiantes realicen análisis y diseño del sistema de control. Usando el mismo sistema de las figuras 1 y 2 no es posible que todos los estudiantes trabajen sobre variantes diferentes, además de que la complejidad dinámica de este lazo es extremadamente simple. Para lograr tal fin se ha incluido en el lazo una función de transferencia simulada. Es muy importante dejar claro para los estudiantes que esta función de transferencia simulada no tiene relación con el concepto de carga mecánica que se trabaja en accionamientos eléctricos; tampoco es un filtro propiamente dicho en el sentido de que realice la función de filtrar determinadas componentes de frecuencia.
La función de transferencia simulada cumple dos objetivos. El primero es lograr tener una complejidad dinámica que permita abordar los distintos objetivos de la asignatura, como son el análisis de sistemas de control en los dominios del tiempo y la frecuencia además de la síntesis de reguladores tanto continuos como discretos. Su segundo objetivo consiste en conseguir la diversidad en las variantes a resolver por los estudiantes y de esta forma garantizar que cada uno de ellos enfrente un problema diferente.
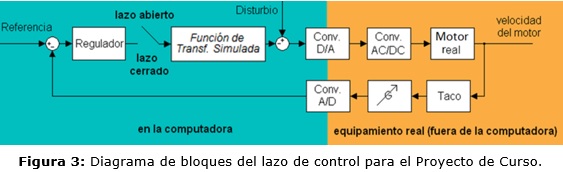
El diagrama de bloques mostrado en la figura 3 es el que se implementa para que los estudiantes puedan trabajar distintas variantes del proyecto de curso. Estas variantes se consiguen simulando diversos tipos de funciones de transferencia y haciendo corresponder a cada estudiante una de ellas. Este instrumento virtual puede trabajar conectado al equipamiento real o solamente en simulación. En este último caso todos los elementos del diagrama de bloques son simulados en la computadora.
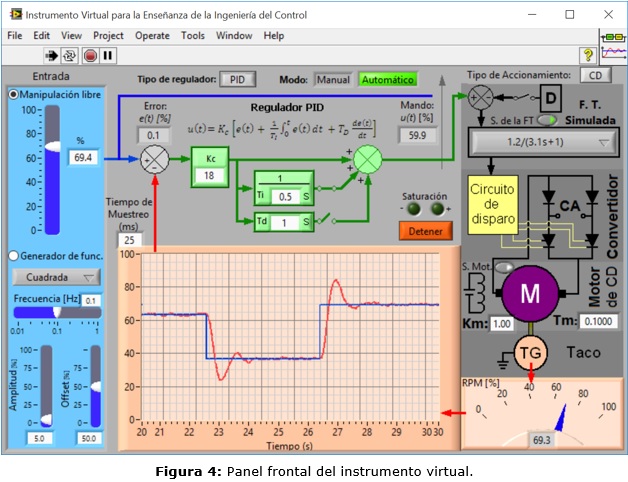
En la figura 4 se muestra el panel frontal del instrumento virtual desarrollado sobre LabVIEW, el cual cuenta de cuatro bloques fundamentales: señal de entrada o de comando, regulador, planta y los instrumentos de indicación y registro del comportamiento de las variables fundamentales. La descripción de las funciones de estos bloques, así como la concepción del proyecto de curso ya ha sido realizada1. Del software se ha generado un instalador que basta para configurar adecuadamente cualquier máquina en que se desee correr; no se necesita de ninguna configuración o instalación adicional.
Se han compilado dos variantes del instrumento virtual; la diferencia entre ambas se encuentra en el mímico que representa la planta. En la primera, el objeto de control es representado tal y como está en la figura 1 que corresponde al diagrama de bloques de la figura 2. Esta versión permite su uso de forma demostrativa, con el fin de explicar a los estudiantes los diversos elementos que conforman un ejemplo de sistema de control real. Con ella se pueden introducir los conceptos fundamentales que se trabajan en Ingeniería del Control. Es muy útil para emplear en la primera clase de la asignatura. Por su parte en la segunda versión la interfaz es la representada en la figura 4, que corresponde al diagrama de bloques de la figura 3. Aquí se tiene como objeto de control un motor operando en vacío. Esto permite utilizar los seis motores de corriente directa que componen el kit Alecop para conformar distintas variantes del proyecto de curso. Desde el punto de vista dinámico no existe apreciable diferencia entre controlar la velocidad del motor en vacío o cuando este opera una carga como la mostrada en la figura 1, ya que el modelo matemático es el mismo y solo cambian los valores de sus parámetros. En esta versión se pueden activar/ desactivar las simulaciones de la función de transferencia que se añade y del motor. En esta variante el efecto del disturbio es simulado.
Con esta herramienta los estudiantes resuelven las siguientes tareas de control: ]]>
· Identificación de los parámetros del modelo matemático de la planta, por el método de la curva de reacción. Esto se realiza de forma real, con el montaje del esquema de la figura 1, pero usando como planta el mímico representado en la interfaz del instrumento virtual de la figura 4. O sea, el motor en vacío.· Análisis de la respuesta temporal. Aquí comparan las respuestas de simulación obtenidas con Matlab y con el instrumento virtual.
· Análisis de respuesta de frecuencia. Se orienta interpretar y comprobar lo obtenido en el diagrama de Bode, en cuanto a la relación de amplitudes y de fase para un conjunto de frecuencias en la señal sinusoidal de entrada.
· Diseño de controladores PID, aplicando los métodos de Ziegler-Nichols, el basado en el ajuste al módulo óptimo y la herramienta para sintonización que posee el bloque PID del Simulink.
· Diseño digital directo (también conocido como método de Ragazzini) aplicando transformada Z10.
· Comprobación real y práctica del desempeño del lazo de control con los cuatro controladores diseñados, comprobando que se cumplan las especificaciones para las cuales se hicieron los distintos diseños.
Concepción para el acceso local acceso remoto
El instrumento virtual ha sido concebido para permitir su empleo de manera local o trabajar con él desde una máquina remota.
En el caso de acceso local, el usuario trabaja en la computadora conectada directamente al conjunto formado por el equipamiento de adquisición de datos control y la planta. Aquí se puede apreciar directamente el efecto de realizar cualquier acción sobre el sistema y el estudiante percibe simultáneamente registros sonoros y visuales; en este último caso ya sea por lo que aprecia en el instrumento como por lo que se ve en la planta. De esta forma se hace muy fácil comprender qué significa la indicación de los instrumentos y por otro lado transmite confianza al usuario sobre el resultado de futuras simulaciones o trabajo remoto. Inicialmente se emplea el instrumento conectado de forma local para realizar demostraciones y las primeras prácticas se conciben para que el estudiante interactúe con todo el sistema accediendo de forma local.
Las posibilidades de acceso remoto permiten el trabajo a distancia de los estudiantes así como la posibilidad de hacerlo en horas no laborables. Con ello se consigue un mejor aprovechamiento del equipamiento de laboratorio y el trabajo extra-clase de los alumnos11, 12. Para realizar el acceso tan solo hay que disponer de un navegador web y direccionar al servidor de esta aplicación que sería la máquina conectada físicamente al PLC y los motores. ]]>
Implementación de las funciones de transferencia simuladasPara lograr reguladores tipo PID por el método de diseño en base al módulo óptimo en el lazo de control de velocidad del motor, trabajando con su modelo aproximado a una planta de primer orden, es necesaria la simulación de cuatro tipos de funciones de transferencia7. Ellas son:




donde:
K ganancia
Tp constante de tiempo de la planta
c1, c2, c3 coeficientes de la ecuación característica de la función de transferencia de segundo orden ]]>
La simulación de la función de transferencia se hace implementando las ecuaciones de diferencia correspondientes. De esta forma el cálculo de la salida en función de la entrada se realiza solamente en los instantes de muestreo, lo cual es computacionalmente más eficiente que realizar la simulación por métodos de integración numérica a partir de los modelos continuos. Por tanto, se necesitan los modelos discretos de las funciones de transferencia.Como se conoce, a partir de un modelo continuo se pueden obtener varios modelos discretos. Esto se debe a que ningún modelo discreto es capaz de reproducir todas las características dinámicas de un modelo continuo.
Por esta razón existen varias equivalencias discretas de un mismo modelo continuo, donde cada una mantiene en forma discreta, una característica del modelo continuo; por ejemplo, la respuesta impulsiva, la respuesta al paso escalón, la respuesta de frecuencia para una frecuencia dada, etc.
La equivalencia que se empleará para simular las funciones de transferencia será la que mantiene la respuesta al paso escalón, que es conocida como equivalencia con retenedor de orden cero10. Se empleará esta y no otra para poder realizar estudios del comportamiento en lazo abierto ante entradas paso escalón, de la función de transferencia por sí sola o del conjunto función de transferencia motor. Para obtener esta equivalencia discreta se coloca delante del modelo continuo la función de transferencia de un retenedor de orden cero. Es decir:

A continuación se obtienen los modelos discretos mediante la equivalencia con retenedor de orden cero, para cada una de las funciones de transferencia. Es imprescindible disponer de estos modelos discretos en función de sus parámetros generales para lograr modificar las variantes de funciones de transferencia simuladas en cada año que se imparta nuevamente la asignatura.
· Función de transferencia tipo integrador:
En este caso el modelo discreto de la ecuación (1) está dado por:

Empleando la tabla de transformadas, a partir de (6) se obtiene10: ]]>

donde:
T tiempo de muestreo
· Función de transferencia de primer orden:
Ahora la equivalencia discreta de la planta, dada por (2) es:

Aplicando una tabla de transformada a la ecuación (8), se puede igualmente resolver 10. Así se obtiene:
· Función de transferencia de primer orden con integrador:
Para la planta de primer orden con integrador, ecuación (3), se tiene: ]]>

También se encuentra en una tabla de transformadas 6, 10.

· Función de transferencia de segundo orden:
El modelo discreto de la planta continua estará dado por la equivalencia discreta de la ecuación (4):

Este caso no es común en tablas de transformada, pero sí aparece en las más especializadas10.

con:
 ]]>
]]>

La expresión (13) es particularmente útil cuando el sistema de segundo orden presenta raíces complejas conjugadas. Si se emplea un software como MATLAB, que es capaz de operar con números complejos, entonces se pueden usar estas expresiones independientemente del tipo de raíces que presente el sistema. Ahora, en el caso del LabVIEW no es posible su empleo cuando las raíces son reales, ya que el mismo no opera con números complejos, arrojando como resultado NaN que significa que no es un número (del inglés Not A Number).
Por esta razón es necesario evaluar dos casos particulares: cuando las raíces de la ecuación de segundo grado son complejas conjugadas y cuando estas raíces son reales.
Sistema de segundo orden con raíces complejas conjugadas:
En este caso se hace necesario adecuar la expresión general de la función de transferencia a la expresión que aparece en la tabla de transformadas.



de aquí:
 ]]>
]]>

resolviendo:

Ahora se puede encontrar la transformada Z de la cuarta planta para equivalencia retenedor de orden cero.

Donde a y b están dadas por las expresiones (21) y (22), mientras que A y B se calculan según (14) y (15). Simplificando:

Sistema de segundo orden con raíces reales:
Cuando las raíces del polinomio característico son reales, se emplea la siguiente expresión para calcular el modelo discreto de la planta: ]]>

Donde a y b son las raíces reales dadas por:

Para este caso no existe en las tablas consultadas una expresión que se pueda usar directamente. Por tanto, es necesaria realizar una descomposición en fracciones más simples que aparezcan en la tabla.

Con este resultado se puede pasar a calcular la equivalencia discreta de la cuarta planta.


Operando algebraicamente se llega a la siguiente expresión final: ]]>

Con:


Considerando que la entrada a la función de transferencia es la señal de mando m(k) y la salida es y(k), las ecuaciones de diferencia que hay que programar en LabVIEW para simular las distintas variantes son las siguientes:
· Función de transferencia tipo integrador

· Función de transferencia de primer orden

· Función de transferencia de primer orden con integrador: ]]>

· Función de transferencia de segundo orden con raíces de la ecuación característica complejas conjugadas:
· Función de transferencia de segundo orden con raíces reales en la ecuación característica:
RESULTADOS Y DISCUSIÓN
Este instrumento virtual ha sido aplicado con éxito durante tres cursos en la Universidad de Camagüey. Además se ha utilizado en otras universidades cubanas como la de Las Villas, Santiago de Cuba y el ISPJAE de La Habana. Por otro lado, se ha empleado para apoyar la docencia impartida por los autores en universidades de Venezuela y Mozambique.
Los primeros resultados se pueden resumir de la siguiente manera: ]]>
• Se ha ganado en la motivación de los estudiantes hacia la asignatura. Esto, además de ser apreciado durante el desarrollo de las clases se ha confirmado a través de los resultados que han arrojado la aplicación de la técnica PNI (positivo, negativo, interesante), en la cual los estudiantes han vertido criterios muy positivos acerca de la asignatura y del desarrollo del proyecto, contrario a los resultados de igual técnica aplicado en cursos anteriores, cuando no se disponía de este instrumento virtual.• Se logró transmitir a los estudiantes una visión interdisciplinaria, entre las asignatura recibidas en años anteriores y las que están recibiendo en este 3er año, así como con las de la disciplina que se les impartirán en años posteriores.
• Se consiguió una mejor comprensión de conceptos teóricos como: lazo abierto lazo cerrado, respuesta temporal, respuesta de frecuencia, características y efectos de las acciones de control, diseño e implementación de reguladores digitales, entre otros.
• Se ha aplicado con éxito en la docencia y evaluación de la asignatura afín que se imparte en la maestría de Ingeniería Eléctrica de la Universidad de Camagüey.
Para continuar el desarrollo de este trabajo se labora en el perfeccionamiento del proyecto de curso para años siguientes en función de diversificar el objeto de control y se enfatizará en las posibilidades de acceso remoto. Por otro lado se prepara una evaluación exhaustiva de su impacto en la docencia, desde el punto de vista pedagógico.
REFERENCIAS
1. REGALÓN, Orlando; RODRÍGUEZ, Vladímir; DIEZ, Milagros; BÁEZ, Raúl: «Instrumento virtual para la enseñanza de la Ingeniería del Control en la carrera Ingeniería Eléctrica» en CD del II Congreso Cubano de Ingeniería Eléctrica, ISPJAE, Ciudad de La Habana, Cuba, 2012. ISBN 978-959-261-405-5
2. CANDELAS, Francisco; TORRES, Fernando; GIL, Pablo; ORTIZ, Francisco; PUENTE, Santiago, POMARES, Jorge: «Laboratorio virtual remoto para robótica y evaluación de su impacto en la docencia» en Revista Iberoamericana de Automática e Informática Industrial, Vol. 1, No. 2, pp. 49-57, 2012
3. YOU, Lihua; ZHOU, Yang: «Building of «testing technology» experimental teaching system based on virtual instrument» en Experimental Technology and Management, Vol. 28, No. 2, pp. 83-86, 2011
4. MAROZAS, Vaidotas; JURKONIS, Rytis; LUKOŠEVIÈIUS, Arunas: «Development of virtual and remote lab experimentation system for electronics engineering» en Electronics and Electrical Engineering, Vol. 87, No. 7, pp. 41-44, 2008
5. CHEUNG, Siu; YUEN, Yau; QIU, Xian: «An experience of teaching for learning by observation: Remote-controlled experiments on electrical circuits» en Computers & Education, Vol. 52, No. 3, pp. 702-717, 2009
6. OGATA, Katsuhiko. Ingeniería de Control Moderna. Pearson Education, S.A. Madrid, 2010. 904 p.
7. COSTA, Angel; Bonne, Félix. Principios fundamentales de accionamiento eléctrico. Editorial Pueblo y Educación. Ciudad de La Habana, 1989. 379 p.
8. ORTEGA, Romeo, ESPINOSA, Gerardo: «Torque Regulation of Induction Motors» en Automática, Vol. 29, No. 33, pp. 621-633, 1993
9. GRIMALDI, Domenico; RAPUANO, Sergio: «Hardware and software to design virtual laboratory for education in instrumentation and measurement» en Measurement, Vol. 42, No. 4, pp. 485 - 493, 2009
10. FRANKLIN, Gene; POWELL, David; WORKMAN, Michael. Digital control of dynamic system. Addison-Wesley. California. 1998. 742 p.
11. LORANDI, Alberto; HERMIDA, Guillermo; HERNÁNDEZ, José; LADRÓN DE GUEVARA, Enrique: «Los laboratorios virtuales y laboratorios remotos en la enseñanza de la ingeniería» en Revista Internacional de Educación en Ingeniería, Vol 4, No. 1, pp. 24-30, 2011
12. MARCHISIO, Susana; LERRO, Federico; VON, Oscar: «Empleo de un laboratorio remoto para promover aprendizajes significativos en la enseñanza de los dispositivos electrónicos» en Revista de Medios y Educación, No. 38, 2010
Recibido: 15 de enero de 2015
Aprobado: 27 de mayo de 2015
Orlando Regalón Anias, Departamento Ing. Eléctrica de la Facultad Electromecánica, de la Universidad de Camagüey, Camagüey, Cuba. E-mails: orlando.regalon@reduc.edu.cu, milagros.diez@reduc.edu.cu, vladimir.rodriguez@reduc.edu.cu, raul.bprieto@reduc.edu.cu, leisis.lopez@reduc.edu.cu, francisco.pacheco @reduc.edu.cu. ]]>
{kind=link}