Nonlinear Model Predictive Control of a Passenger Vehicle for Automated Lane Changes
Control Predictivo basado en modelo de un vehículo de pasajeros para cambios de carril automatizados
Andrés F. Acosta Gil I, Alejandro Márquez Ruíz II, Jairo J. Espinosa I
I Universidad Nacional de Colombia Campus of Medellín. Medellín, Colombia. ]]>
II TU-Eindhoven. Netherlands.
ABSTRACT
This article presents a nonlinear Model Predictive Control (MPC) for lane changes, based on a simplified Single Track Model (STM) of the vehicle. The STM includes the position of the vehicle in global coordinates as a state so that the position of the target lane can be specified to the MPC for reference tracking. Moreover, a constraint for maintaining a safety distance with the vehicles in the target lane is included. Simulation results show the effectiveness of the MPC in scenarios with different initial conditions that demonstrate the correct implementation of the safety distance constraint.
Keywords: Model Predictive Control, Single Track Model, Lane Change Control
RESUMEN
Este artículo presenta un esquema de Control Predictivo basado en Modelo (CPM) no lineal para cambios de carril, a partir de un modelo de una sola línea (MSL). El MSL incluye la posición del vehículo en coordenadas globales como un estado tal que la posición del carril de destino pueda ser especificada en el CPM para el seguimiento de la referencia. También se incluye una restricción para mantener una distancia de seguridad con los vehículos que se encuentran en el carril de destino. Los resultados de simulación muestran la efectividad del CPM en escenarios con diferentes condiciones iniciales que demuestran la correcta implementación de la restricción relacionada con la distancia.
Palabras Claves:Control Predictivo basado en Modelo, Modelo de Seguimiento Individual, Control de cambio de carril
]]>
1.- INTRODUCTION
Lane changes are one of the main tasks of driving. They are performed for following the desired route (e.g. positioning the vehicle in the proper lane for a turn) or for increasing or lowering some desired speed, bypassing or letting pass vehicles in the source lane. There is an increasing interest in modeling and control for lane changes in autonomous vehicles in the last decades. Achieving an autonomous lane change can be a challenging task since it requires certain information related to the vehicle, the driver, the other vehicles interacting with him and the environment. Furthermore, lane change models are one of the most important components of microscopic traffic simulators. They can be divided into three main processes [1]: the decision of changing a lane, the gap-acceptance process and the execution of the maneuver. Microscopic lane-change models have been widely studied in the first two processes. However, the execution of the maneuver is ignored in many traffic simulators, although several authors have been found that the duration of a lane change can affect the traffic flow in both the source and the destination lanes [2]. On the other hand, the execution of the lane change maneuver is closely related to the dynamics of the vehicle, where many models can be found [3]. These models are sometimes classified as submicroscopic models [4] and are extensively used in Advanced Driving Assistance Systems (ADAS) and autonomous vehicles applications.
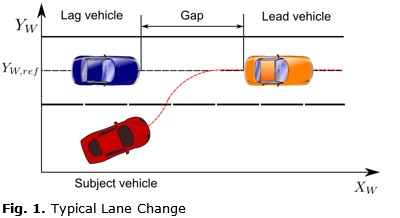
A typical lane change, as described in [5], involves three vehicles: The subject vehicle, which is the vehicle that wants to perform the lane change; the lead vehicle, which is the vehicle positioned in front of the available gap in the target lane and the lag vehicle, which is the vehicle positioned in the back of the available gap. Figure 1 illustrates a typical Lane Change. Sen et al. [5] found that the majority of lane change crashes were caused by typical lane changes. Moreover, they found that 9% of the total crashes were caused by lane changes involving two vehicles, where the main cause was that the subject vehicle could not see the Principal Other Vehicle (being the lead or the gap vehicle, depending on the degree of interaction). For this reason, research on Advanced Driving Assistance Systems (ADAS) and autonomous vehicles have received increasing attention in the last decades, resulting in improvements for vehicle safety systems, featuring high-accuracy sensors including radar, sonar, and GPS technologies. Furthermore, vehicles are incorporating advanced control systems supported by communication technologies such as Vehicle-to-Vehicle and Vehicle-to-Infrastructure (V2V and V2I). These advancements resulted in commercial applications and scientific prototypes with different levels of complexity, where the most common are described, as follows:
• Lane departure systems, whose main goal is to alert the driver if he/she is unintentionally deviating from the current lane, i.e. if the driver has not activated the turn signals. Note that this system does not automatically control the vehicle. In its most common form, the lane departure system includes an onboard camera, which is capable of detecting the lane markings and estimating the relative position of the vehicle with respect to them.
• Lane keeping systems, which represents an improvement to the lane departure systems. In this case, the system controls the steering wheel to keep the vehicle in the center of the current lane. Like in the lane departure system, if the driver wants to make a lane change, he/she must activate the turn signal.
• Lane changing assistants, whose main goal is to assist the driver to follow a desired lane change trajectory.
• Fully automated lane change systems, used in autonomous vehicles to perform the lane change maneuver without the need of a driver. In this case, the vehicle is usually equipped with several sensing devices that allow it to identify obstacles and other vehicles and features a more complex control system including the steering wheel, accelerator, and brake pedals as inputs.
]]> Many control systems for lane changes are based on a dynamic model of the vehicle, being one of the most frequently used the Single Track Model (STM), which simplifies the structure of the vehicle, representing the front and rear tires as one. The STM has been used in successful applications such as reference trajectory generation and tracking (6), obstacle avoidance (7) and stabilization (8). However, some works assume predefined trajectories that do not consider constraints. On the other hand, the implementation details of many commercial applications remain as a trade secret. This article presents a nonlinear MPC based on a simplified STM and formulated for reference tracking in one of its states to achieve a lane change maneuver. Furthermore, the proposed MPC includes a constraint that considers vehicles in the destination lane to maintain a safe distance with them. This article is organized as follows: Section 2 describes the dynamic model of the vehicle. Section 3 explains the Model Predictive Control problem for lane changes. Section 4 introduces the constraint for including interaction with vehicles in the target lane. Section 5 shows simulation results. Finally, Section 6 concludes the article.
2.- VEHICLE MODEL
Among the different dynamic vehicle models, the Single Track Model (STM) has been widely used mainly due to its simplicity and representativeness. The main assumption of this model, sometimes called bicycle model, is that the two front wheels and the two rear wheels are "collapsed" into one, as showed in Figure 2.
Note that the STM considers a local coordinate system x',y', which is fixed in the vehicle and "travels" with it. Specifically, the origin of this coordinate system is placed in the center of mass of the vehicle G, the x' axis is aligned with the longitudinal axis of the vehicle, and perpendicular to it is the y' axis, which points in direction of the instantaneous turning center O. The dynamics of the vehicle given in the x' axis are called longitudinal dynamics, while in the y' axis are called lateral dynamics. In this case, the STM assumes that the vehicle moves at constant speed( ) then only the lateral dynamics are considered. On the other hand, there is a global coordinate system XW,YW, whose origin is at the beginning of the street, assumed to be straight, where the XW axis is aligned with the center of the departure lane. This global coordinate system is used for the specification of the heading angle of the vehicle ψ and the position of the center of the destination lane Y(W,ref), which is the reference value to be tracked by the MPC controller. In general, STM models can be classified as gray box models, they consist of a phenomenological nature, given by the fundamental laws of momentum conservation applied on the center of gravity G and an empirical nature that describes the dynamics on the road-tire contact due to the complex structure of the latter. When the vehicle dynamics are considered on the local coordinate system, and it is assumed that the lateral forces acting on the tires are linear with some small angle approximations, the resulting STM is linear, as showed in equation (1), with a state vector given by the equation (2). The unidimensional input that determines the lateral dynamics is the front wheel steering angle δ, which is defined as the angle between the x' axis and the direction of the front wheel, as described by equation (3).
) then only the lateral dynamics are considered. On the other hand, there is a global coordinate system XW,YW, whose origin is at the beginning of the street, assumed to be straight, where the XW axis is aligned with the center of the departure lane. This global coordinate system is used for the specification of the heading angle of the vehicle ψ and the position of the center of the destination lane Y(W,ref), which is the reference value to be tracked by the MPC controller. In general, STM models can be classified as gray box models, they consist of a phenomenological nature, given by the fundamental laws of momentum conservation applied on the center of gravity G and an empirical nature that describes the dynamics on the road-tire contact due to the complex structure of the latter. When the vehicle dynamics are considered on the local coordinate system, and it is assumed that the lateral forces acting on the tires are linear with some small angle approximations, the resulting STM is linear, as showed in equation (1), with a state vector given by the equation (2). The unidimensional input that determines the lateral dynamics is the front wheel steering angle δ, which is defined as the angle between the x' axis and the direction of the front wheel, as described by equation (3).
In equations (4) and (5) m is the mass of the vehicle, Iz its yaw moment of inertia, i.e. the rotational inertia around the z' axis and lf and lr the distances from its center of mass G to the front and rear wheels, respectively.
The differential equations (6) and (7) allow obtaining the position of the vehicle in global coordinates [10].
The linear STM described above can be used in a state feedback or a Linear Quadratic Regulator (LQR) controller. However, a controller designed with a linear STM for lane changes would need to track an entire lane change trajectory, which can be designed based on equations (6) and (7). For simplifying this step, the approach proposed in this article consists on incorporating( ) and (
) and ( ) as states [11], resulting in a nonlinear STM model as showed in equation (8) with a state vector defined by equation (9). With this approach, it is not necessary to specify the entire lane change trajectory, but the position of the center of the target lane, which is a constant parameter in a reference-tracking controller.
) as states [11], resulting in a nonlinear STM model as showed in equation (8) with a state vector defined by equation (9). With this approach, it is not necessary to specify the entire lane change trajectory, but the position of the center of the target lane, which is a constant parameter in a reference-tracking controller.
3.- NONLINEAR MPC PROBLEM FOR LANE CHANGES
Based on the nonlinear STM described in the previous section, the proposed MPC problem for achieving a lane change is showed in equation (10), where N is the prediction horizon given in number of samples and Q and R are the tuning matrices of the controller. The MPC optimization is performed for every time step k and only the first obtained control action is applied to the vehicle, resulting in an iterative process known as receding horizon in MPC theory. The quadratic multi-objective cost function of equation (10) is aimed to minimize the error between the output of the model y(k+j) and its reference value yref, and the control actions u(k+j) required to perform the lane change along the entire prediction horizon. Equations (11) to (15) are the constraints of the optimization problem. These constraints include the discretized nonlinear STM given by equations (11) and (12) and two operational constraints related to the input and its rate of change in equations (13) and (14). The constraint (15) is used for maintaining a safety distance with the vehicles in the target lane, and is explained in the following section.
Subject to:

In this case, it is assumed that the position of the vehicle [XW,YW ]T can be measured directly. This is a reasonable assumption since there is an increasing number of vehicles equipped with high accuracy GPS devices. Thus, the measurement model and reference value are, as follows:
4.- INTERACTION WITH VEHICLES IN THE TARGET LANE
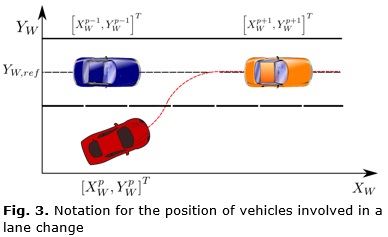
The MPC for lane changes includes the constraint given by equation (16) for considering the typical lane change scenario showed in Figure 1. In order to explain this constraint, let us denote the subject vehicle with the super index p and the lead and lag vehicles with the super indexes p+1 and p-1, as showed in Figure 3.
The position of the subject vehicle and the vehicles in the target lane can be written as:
]]>
with p≠q. Note that these equations imply the assumption that the subject vehicle can get the position of the lead and gap vehicles, which can be achieved through a Vehicle-to-Vehicle (V2V) communications system. Thus, the safety distance constraint is:
where d(p,q) (k+j) is the Euclidean distance from the center of mass of the subject vehicle to the center of mass of the vehicle q, as showed in equation (22).
At this point, it is important to note that the subject vehicle has to predict the position of the vehicles in the target lane along the prediction horizon. While car-following models are the most suitable to this end, in this article the MPC uses a simplified model, with the assumption that the lead and lag vehicles do not interact with each other and move at a constant speed, this is:
Where ( ) is constant.
) is constant.
5.- SIMULATION RESULTS
The MPC for lane changes described so far was implemented in Matlab®/Simulink®. Satisfactory results were obtained using the fmincon solver with Sequential Quadratic Programming (SQP). Simulation parameters are showed in Table 1, where the parameters of the vehicle are the same used by Rajamani [9], and the prediction horizon corresponds to 5 seconds. This prediction horizon is, according to [2], in the range of a lane change duration. Note that situations, where the subject vehicle avoids the maneuver due to errors in the selection of the gap, are not considered. The values for umin, umax, ∆umin and ∆umax were taken from [12]. Finally, since the input ant the output are scalars, so are the tuning matrices Q and R. The numerical solution of the STM was done at each simulation step using the stiff/NDF provided by the ODE15s solver.
In a first experiment, the MPC problem was relaxed by ignoring the presence of vehicles in the target lane. Figure 1 shows the obtained control action, which is the front wheel steering angle, and the position of the vehicle in the YW coordinate. The reference value is applied in t=3 seconds and the vehicle arrives to the center of the target lane in 3.7 seconds. There is an overshoot with a maximum deviation from the center of the target lane of 0.44 meters, which does not represent a safety risk. The stabilization time is about 6.2 seconds.
Figure 5 shows the obtained behavior of the constraint related to the rate of change of the input. Note that this lane change did not require the control action to achieve its maximum value, according to Figure 4 (a). On the other hand, the vehicle achieves the maximum rate of change of the input, as showed in Figure 5.
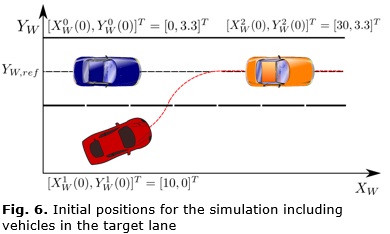
A second experiment included the presence of the lead and gap vehicles, denoted with the super indexes 0 and 2, as showed in Figure 6, where their initial positions and that of the subject vehicle are specified. Additionally, they and the subject vehicle move at the same speed i.e. ( ) = (
) = ( ) = 5.56 m/s. In a final experiment, the MPC was stressed by changing the initial condition of the subject vehicle to [X1w,Y1w]t =[0,0]t, in order to illustrate a case that violates the safety distance constraint,
) = 5.56 m/s. In a final experiment, the MPC was stressed by changing the initial condition of the subject vehicle to [X1w,Y1w]t =[0,0]t, in order to illustrate a case that violates the safety distance constraint,
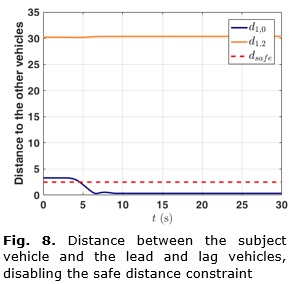
Figure 7 shows the control action and the position of the vehicle in the global coordinate YW for the simulations including vehicles in the target lane with the initial conditions described above. In this case, when the initial position of the subject vehicle is [X1w,Y1w]t =[0,0]t, the lane change is not possible because it would violate the safety distance constraint, colliding with the lag vehicle. In order to illustrate this point, the safety distance constraint was disabled and the distances between the subject vehicle and the lead and lag vehicles were computed, as showed in Figure 8. Note that, starting from 5 seconds, the distance between the subject and the lag vehicles decreases below the safety distance.
6.- CONCLUSIONS
This article presented a nonlinear MPC for automated lane changes, based on a simplified Single Track Model (STM) of the vehicle. The MPC is a reference-tracking controller that incorporates the transformation from vehicle-local coordinates to global coordinates in the STM model so that the vehicle can follow the position of the center of the destination lane. Furthermore, the proposed MPC includes a constraint for maintaining a safety distance with the vehicles in the target lane, assuming a simplified model for predicting their positions. Simulation results showed the effectiveness of the automated lane change system in several experiments, including a typical lane change scenario with two vehicles in the target lane. Future work will focus on modeling the longitudinal dynamics of the vehicle and including the throttle and brake pedal as inputs to the MPC.
ACKNOWLEDGEMENTS
Authors would like to thank Proyecto Colciencias 11185694640 contrato FP44842-202-2015: Modelamiento y Control de Tráfico Urbano en la Ciudad de Medellín Fase 2. Convocatoria 669. Código Hermes: 25374 and Proyecto Colciencias 111874558167: Reducción de Emisiones Vehiculares Mediante el Modelado y Gestión Óptima de Tráfico en Áreas Metropolitanas - Caso Medellín - Área Metropolitana del Valle de Aburrá. Convocatoria 745. Código Hermes: 3411155.
]]>REFERENCES
1. Toledo T. Driving Behaviour: Models and Challenges. Transp Rev. 2007;27(1):65–84.
2. Toledo T, Zohar D. Modeling duration of lane changes. Transp Res Rec J Transp Res Board. 2007; (1999):71-78. Available from: http://trrjournalonline.trb.org/doi/abs/10.3141/1999-08
3. Schramm D, Hiller M, Bardini R. Vehicle Dynamics. Berlin, Heidelberg: Springer Berlin Heidelberg; 2014. Available from: http://link.springer.com/10.1007/978-3-540-36045-2
4. Maerivoet S, De Moor B. Transportation planning and traffic flow models. ArXiv Prepr Physics0507127. 2005. Available from: http://arxiv.org/abs/physics/0507127
5. Sen B, Smith JD, Najm WG. Analysis of lane change crashes. 2003. Available from: http://trid.trb.org/view.aspx?id=679579
6. Gerdts M, Karrenberg S, Müller-Beβler B, Stock G. Generating locally optimal trajectories for an automatically driven car. Optim Eng. 2009;10(4):439–463.
7. Park JM, Kim DW, Yoon YS, Kim HJ, Yi KS. Obstacle avoidance of autonomous vehicles based on model predictive control. Proc Inst Mech Eng Part J Automob Eng. 2009;223(12):1499–1516.
8. Güvenç BA, Güvenç L, Karaman S. Robust yaw stability controller design and hardware-in-the-loop testing for a road vehicle. Veh Technol IEEE Trans On. 2009;58(2):555–571.
9. Rajamani R. Vehicle dynamics and control. Springer Science Media & Business; 2006 (cited 2017 Jan 24). Available from: http://dl.merc.ac.ir/handle/Hannan/18594
10. Guiggiani M. The Science of Vehicle Dynamics. Dordrecht: Springer Netherlands; 2014. Available from: http://link.springer.com/10.1007/978-94-017-8533-4
11. Falcone P, Borrelli F, Asgari J, Tseng HE, Hrovat D. Predictive Active Steering Control for Autonomous Vehicle Systems. IEEE Trans Control Syst Technol. 2007;15(3):566–80.
12. Anderson SJ, Peters SC, Pilutti TE, Iagnemma K. An optimal-control-based framework for trajectory planning, threat assessment, and semi-autonomous control of passenger vehicles in hazard avoidance scenarios. Int J Veh Auton Syst. 2010;8(2):190–216.
Received: 10 de septiembre del 2016
Approved: 19 de enero del 2017
Andrés Felipe Acosta Gil, Universidad Nacional de Colombia Campus of Medellín. E-mail: afacostag@unal.edu.co.
]]>


 ]]>
]]>




 ]]>
]]>




 ]]>
]]>







 ]]>
]]>
{kind=link}
{kind=link}