Estudio comparativo en sistemas multivariables con retardo: modificaciones del Predictor de Smith y Control Predictivo
Comparative study in multivariable systems with time delay: Smith Predictor Modifications and Predictive Control
Ernesto Estremera Toledo, Ania Lussón Cervantes, Irina Bausa Ortiz
Universidad de Oriente, Santiago de Cuba, Cuba.
]]>
RESUMEN
En este trabajo se presenta la compensación del retardo de tiempo a través del diseño de las estrategias de control Predictor de Smith Filtrado, Predictor de Smith Modificado (MSP) y Control Predictivo, para procesos multivariables estables, inestables y de fase no mínima. Se emplean tres casos de estudio, donde se muestra mediante simulación el comportamiento de cada estrategia según las características dinámicas del proceso. Los resultados de simulación se obtienen mediante el Matlab® y la comparación de las estrategias de control empleadas se realiza a partir del desempeño temporal del sistema controlado, del rechazo a perturbaciones, seguimiento de referencias y el manejo de incertidumbres. Además, se presenta una modificación al MSP para el caso de perturbación en la carga. Los resultados de simulación evidencian que las prestaciones de la propuesta son superiores a la versión original MSP.
Palabras claves: Retardo de tiempo, Control multivariable, Control predictivo, Compensación de retardo, Sistemas de fase no mínima.
ABSTRACT
In this paper we present the time delay compensation through the design of control strategies like Filtered Smith Predictor, Modified Smith Predictor (MSP) and Predictive Control, for stable, unstable and non-minimal phase multivariable processes. Three case studies are used, where the behavior of each strategy is shown by simulation, according to the dynamic characteristics of the process. The simulation results are obtained by Matlab® and the comparison of the control strategies used is performed by the time performance of the controlled system, rejection of disturbances, monitoring of references and handling of uncertainties. In addition, a modification to the MSP is presented for the case of disturbance in the load. The simulation results show that the performance of the proposal is higher than the original MSP version.
Keywords: Time delay, Multivariable control, Predictive control, Delay compensation, Non- minimum phase system.
]]> 1.- INTRODUCCIÓN
La mayoría de los procesos presentes en cualquier industria tienen varias variables manipuladas y varias variables controladas, estos sistemas son conocidos como de Múltiples Entradas-Múltiples Salidas (MIMO). En ellos existe una interacción entre sus variables, de tal forma que una variable de entrada afecta a varias variables de salida, por lo que se hace más complejo diseñar una estrategia de control para minimizar estas interacciones y que las mismas no afecten la estabilidad de la planta.
La presencia de retardo de tiempo, es también una característica de muchos procesos industriales, dicho retardo puede aparecer en las distintas entradas del proceso, en la medición de variables, así como en la interconexión de variables internas. En realidad, no existe ningún sistema dinámico real que esté completamente libre de este problema, por cuanto las señales toman un tiempo finito en su propagación por cualquier medio. Debido a esto, este tipo de sistemas presentan una elevada atención para ingenieros e investigadores del tema. El retardo es el tiempo que transcurre desde el instante en que se produce un cambio en la variable de entrada del proceso hasta el instante en que el efecto de dicha variación comienza a observarse en su variable de salida.
Las funcionalidades de los sistemas de control presentan una marcada sensibilidad a los retardos, la presencia de ellos implica la introducción de fase negativa en los sistemas de control, originando una disminución en los márgenes de fase y de ganancia, ocasionando en algunos casos que sistemas que sin el retardo son estables, con la presencia de estos se hagan inestables. Lo anterior demuestra que la presencia del retardo en el comportamiento dinámico de muchos procesos físicos o de ingeniería influye negativamente sobre el comportamiento del sistema. Dentro de los principales factores de éxito en el control de procesos caracterizados por la presencia de retardos de tiempo se encuentra la correcta selección de la estrategia de control a utilizar. El Predictor de Smith (SP) ha sido una de las estrategias de control más utilizadas para la compensación de retardo de tiempo, su principal limitación es que no se puede usar para plantas inestables e integradoras y no puede acelerar la respuesta al rechazo de perturbaciones más que el lazo abierto [1, 2].
En 1997 se introduce en la literatura el SP Filtrado (FSP) como una solución sencilla para mejorar la robustez del SP ante errores de modelado para procesos estables, donde se incluye un filtro de predicción para atenuar las oscilaciones en la salida de la planta, especialmente en las frecuencias donde las incertidumbres en el error son importantes. Esta misma estructura puede ser aplicada para procesos inestables o con un modo integrador considerando una correcta sintonía del controlador primario y del filtro de predicción [3].
El control predictivo es una de las técnicas de control moderno más potentes y quizás la que ha tenido más éxito en aplicaciones industriales [4-6] . Algunas razones para ello son: puede ser aplicada en sistemas multivariables, las acciones de control por pre alimentación pueden ser incluidas en el algoritmo de forma directa, las restricciones en las variables de entrada y salida de la planta pueden ser consideradas en tiempo real en el controlador y, además, por la propia definición del algoritmo, puede ser usado para controlar procesos con retardo. Esta última propiedad es la principal motivación para el estudio del comportamiento y robustez de los controladores predictivos cuando son aplicados a este tipo de procesos [7, 8].
La mayor parte de las técnicas de control para compensación del retardo de tiempo, consideran el retardo determinístico y conocido [9, 10]; sin embargo, en determinadas situaciones es necesario considerar retardos de tiempo variables [11], tal es el caso de aplicaciones de sistemas de control en red y sistemas de control con tiempo de muestreo variable, por sólo mencionar algunas. En este trabajo, en las estrategias de control empleadas se considera el retardo de tiempo constante.
Todo lo anteriormente planteado demuestra que la presencia de retardo de tiempo e interacciones en un sistema por sí solas hacen difícil obtener el control deseado en el mismo y mucho más complicado resulta si estas características se unen en un mismo sistema. El objetivo de este trabajo es comparar el desempeño de diferentes estrategias de control avanzado para sistemas MIMO estables, inestables y de fase no mínima con retardo de tiempo, para seguir cambios en la referencia, para el rechazo a las perturbaciones y ante las incertidumbres presentes en el modelo. Se presenta una modificación al MSP para el caso de perturbación en la carga. Haciendo uso del Matlab® se muestran las prestaciones de dichas estrategias en diferentes casos de estudio.
]]> 2.- ESTRATEGIAS DE CONTROL PARA COMPENSACIÓN DE RETARDO
El comportamiento de un sistema de control es muy perceptivo ante la existencia de retardos, más incluso que a otros parámetros del modelo. De hecho, un sistema de control a lazo cerrado puede llegar a ser inestable como consecuencia de los mismos. La presencia del retardo en los lazos de control tiene dos importantes consecuencias: se complica mucho el análisis y la estabilización de estos sistemas y es muy difícil obtener un control que logre el desempeño deseado. El tiempo muerto en las plantas se debe principalmente al retardo de transporte de materia, y en ocasiones el retardo es simplemente la forma de modelar la influencia de polos de orden superior no dominantes en el sistema [1].
Los procesos con tiempos muertos significativos son difíciles de controlar usando los controladores realimentados convencionales debido principalmente a que: el efecto de las perturbaciones no se observa hasta que ha pasado un cierto intervalo de tiempo, el efecto de la acción de control tarda cierto tiempo en influir sobre la variable controlada, y la acción de control, que es aplicada basada en el error actual, trata de corregir una situación originada cierto tiempo antes.
Básicamente, el análisis y diseño de sistemas lineales con retardos se ha investigado bajo dos tendencias:
1) la reutilización de los esquemas de control clásicos como realimentación estática de estados o salidas, control PID o control en modo deslizante, aproximaciones de Padé, entre otros. La idea de esta tendencia es obtener la técnica adecuada que permita calcular los parámetros del controlador que estabilice el sistema, incluyendo en ésta el efecto del retardo [12, 13].
2) los esquemas de control con compensación del retardo: en estos se proponen arquitecturas de control cuyo objetivo es eliminar el retardo de la ecuación característica en lazo cerrado. Dentro de estas estrategias se encuentran el conocido SP y la técnica de Asignación Finita del Espectro.
El Predictor de Smith fue el primer Compensador de Tiempo Muerto (DTC) propuesto en la literatura, el mismo predice el efecto del retardo frente a una decisión de control y lo elimina de la dinámica del sistema a lazo cerrado. El correcto funcionamiento de este compensador depende del conocimiento exacto del modelo del proceso, así como de la magnitud del retardo de tiempo, cualquier imprecisión en el modelo conlleva a resultados no deseados. Es bueno destacar que es una estructura de control predictiva, con un horizonte de predicción igual al retardo del sistema considerado, pero en la actualidad se considera un DTC [3]. Sin embargo, dicho predictor no se puede usar en plantas inestables ni integradoras y no puede acelerar la respuesta al rechazo de perturbaciones más que el lazo abierto. Además, es muy sensible a errores de modelado. Sólo si se conoce el modelo y su retardo de manera exacta, el compensador de Smith será útil y preciso. Para superar las limitaciones del Predictor de Smith original, existen varias modificaciones del mismo [10, 14-16], en este trabajo se analizan el Predictor de Smith Filtrado y la versión MIMO del Predictor de Smith Modificado (MSP) [15].
2.1.- Predictor de Smith Filtrado
El Predictor de Smith Filtrado constituye uno de los DTCs más utilizados en la actualidad [17, 18], debido fundamentalmente a que puede ser utilizado en todo tipo de plantas con buen desempeño, tal y como muestran los estudios comparativos realizados en [10] y [16]. El análisis de estabilidad robusta de esta estructura para el caso de incertidumbres y retardo variable se presenta en [11]. En la Figura 1 se muestra la estructura del FSP donde P(s) es el proceso real, Gc(s) el controlador, Gm(s) el modelo libre de retardo, e-LmS el modelo del retardo y Fr(s) el filtro pasa bajo [3].
]]>
El filtro de predicción está dado por:
donde el parámetro α puede ser ajustado para obtener la robustez y el comportamiento deseado. Cuando se considera la frecuencia de las oscilaciones de la salida, un simple ajuste puede ser obtenido del filtro de primer orden. Utilizando la frecuencia de corte del filtro como 1/3 de la frecuencia de estas oscilaciones, Tf puede ser tomado como Tf = Lm/2 (a=0.5). Esta opción brinda una buena solución para una incertidumbre en el error de un 30%. En el caso de procesos estables Gc(s) es un controlador PI con:
2.2.- Predictor de Smith Modificado
El diseño de estrategias de control eficaces y robustas se complica para plantas inestables; si a las características de este tipo de procesos se le añade la presencia de retardo de tiempo esta tarea se dificulta aún más [1]. Existen varias modificaciones al SP para este tipo de plantas, entre ellas el Predictor de Smith Modificado (MSP) [15].
El MSP se muestra en la Figura 2, donde ![]() m(s), Ĥm(s) y P(s), H(s) son las funciones de transferencia del modelo de la planta y del sistema real, respectivamente (H(s) es la matriz de los retardos). Esta estructura cuenta con tres controladores:
m(s), Ĥm(s) y P(s), H(s) son las funciones de transferencia del modelo de la planta y del sistema real, respectivamente (H(s) es la matriz de los retardos). Esta estructura cuenta con tres controladores:
Gc1=diag(Gc1i ), i=1,2,…,n, en el lazo interno se diseña para pre estabilizar P.
]]> Gc=diag(Gci ), i=1,2,…,n, se utiliza para el seguimiento a la referencia.Gc2=diag(Gc2i ), i=1,2,…,n, se utiliza para el rechazo a las perturbaciones.
Con el MSP se demuestra que el controlador Gc2 es útil para rechazar perturbaciones en la entrada de la planta [15], sin embargo, no se muestra el comportamiento de esta estrategia de control considerando perturbación en la carga (después de la planta). A continuación, se presenta el análisis matemático del Predictor con la perturbación después de la planta, con y sin Gc2. A la variante sin considerar el controlador Gc2 se le denomina MSP * (ver Figura 3).
Análisis matemático del MSP (Figura 2) con la perturbación después de la planta (con Gc2)
reescribiendo (5):
]]>sacando U* como factor común:
reescribiendo (9)
Las funciones de transferencia que relacionan la salida de la planta con la referencia y la perturbación en la carga están definidas por (11) y (12), respectivamente:
]]> Análisis matemático del MSP* con la perturbación después de la planta - Figura 3 (sin Gc2)En esta configuración se mantienen las ecuaciones (4) y (7) planteadas anteriormente para el cálculo de U* y T, respectivamente, la acción de control en este caso toma la forma:
sacando U* como factor común:
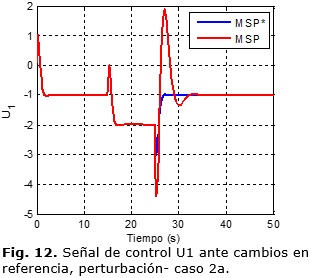
]]> En la ecuación (10) se observa que en el MSP con Gc2, la perturbación L provoca una desviación en la acción de control, y está presente en la ecuación característica a lazo cerrado (ecuación (12)), por lo que influye negativamente en la salida de la planta. Por otro lado, sin considerar Gc2 (MSP*), la acción de control no está afectada por la perturbación L, esto se evidencia en las expresiones (16) y (18). Puede notarse que Gc2 no influye sobre el seguimiento a la señal de referencia. Estos resultados analíticos se corroboran con los resultados de simulación del caso de estudio 2 de la próxima sección.2.3.- Controladores Predictivos
El Control Predictivo basado en Modelo (MPC) se define como una estrategia de control que se basa en la utilización de forma explícita de un modelo matemático interno del proceso a regular, el cual se utiliza para predecir la evolución de las variables a controlar a lo largo de un horizonte temporal de predicción especificado por el operador, de este modo se pueden calcular las variables manipuladas futuras para lograr que en dicho horizonte, las variables controladas converjan a sus respectivos valores de referencia [19]. El control predictivo se puede considerar una técnica madura para sistemas lineales y no muy rápidos como los encontrados normalmente en la industria de procesos [20], aunque en los últimos años se han desarrollado con éxito aplicaciones a sistemas rápidos, como los del campo de la robótica [21, 22].
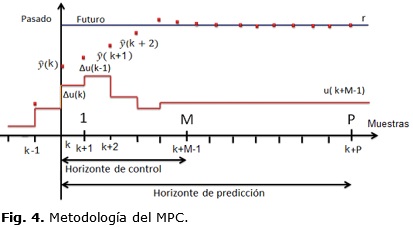
La técnica del Control Predictivo basado en modelo se representa en la Figura 4. Se supone que se parte del instante k y haciendo uso del modelo del proceso se predicen las futuras salidas para un determinado horizonte P, llamado horizonte de predicción. Estas salidas predichas dependen de los valores conocidos hasta el instante k (entradas y salidas pasadas) y de las señales de control futuras. Dicho horizonte P comienza en el instante k +1 y finaliza en el instante k + P. El horizonte de control M es el intervalo para el cual la acción de control será calculada. El conjunto de señales de control futuras se calcula optimizando un determinado criterio en el que se pretende mantener el proceso lo más próximo posible a la trayectoria de referencia. Este criterio suele tomar la forma de una función cuadrática de los errores entre la señal de salida predicha y la trayectoria de referencia.
Los diversos algoritmos MPC proponen distintas funciones de costo (FC) para obtener la ley de control. La finalidad general es que la salida futura (y) en el horizonte considerado debe seguir una determinada señal de referencia (r) y al mismo tiempo, el esfuerzo de control (Δu) necesario para hacerlo debe ser penalizado. La FC más utilizada en la literatura es la cuadrática que se presenta a continuación:
donde, ŷ es la salida predicha, r es el valor de referencia para la salida, ∆u(k+i)=[u(k+i)-u(k+i-1)] es el cambio en la acción de control, ∆ŷ(k+i|k)=[ŷ(k+i+1|k)-ŷ(k+i|k)] es el cambio estimado en la salida predicha, Q, R y W son términos de ponderación dependientes de la aplicación, que efectúan un escalado.
Los parámetros de sintonía característicos del MPC son, el horizonte de predicción P, el horizonte de control M, el intervalo de muestreo T y los coeficientes de peso Q, R y W.
]]> 3.- RESULTADOS Y DISCUSIÓN
En esta sección se realiza el diseño y la simulación de las estrategias de control: PI, FSP, MPC, MSP y MSP* para procesos MIMO con retardo de tiempo. Dentro de los casos de estudio escogidos se encuentran procesos estables, inestables, integradores, y de fase no mínima. Para el ajuste de los controladores PI se utiliza el método ITAE y para las simulaciones se utilizan el Simulink y el Toolbox MPC, ambos pertenecientes al Matlab® [23]. Se realiza un análisis comparativo de los resultados obtenidos en cada caso de estudio con el objetivo de mostrar la estrategia más adecuada en dependencia de las características dinámicas del proceso.
3.1.- Proceso estable
Caso de estudio 1: Fraccionador de aceite
El modelo del fraccionador de aceite ha sido ampliamente utilizado para probar diferentes estrategias de control para columnas de destilación, el cual cuenta con tres variables controladas: la composición de tope (Y1 (mol)), la composición de fondo (Y2 (mol)) y la temperatura de fondo (Y3 (oC)). Las variables manipuladas son la razón de flujo de tope (U1 (mol/s)) la razón de flujo de fondo (U2 (mol/s)) y el flujo de vapor en el fondo (U3 (mol/s)). Los valores de los retardos y las constantes de tiempo se expresan en segundos. La dinámica del proceso puede ser descrita de la siguiente manera [24]:
En este proceso se presenta interacciones entre sus variables, por lo que se aplica el método de Matriz de Ganancias Relativas (MGR) y se obtiene la matriz Λ (ecuación (21)), a partir de la cual se determina el mejor acople de variable controlada-variable manipulada: Y1-U1, Y2-U2, Y3-U3.
En este caso de estudio se implementan tres estrategias de control: PI, FSP, MPC. La Tabla 1 muestra los parámetros de los controladores para cada estrategia. En el caso del FSP se diseña a partir de la Figura 1, los controladores se ajustan según las ecuaciones (2) y (3) y los filtros según la ecuación (1), donde el criterio escogido para seleccionar Tf es la mitad del mayor tiempo muerto (retardo dominante) de la matriz de retardo correspondiente a la variable de salida [25]:
]]>
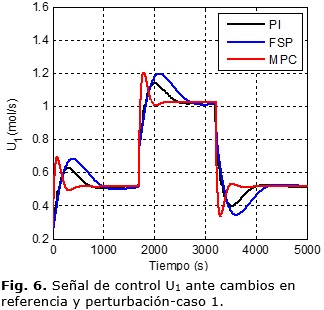
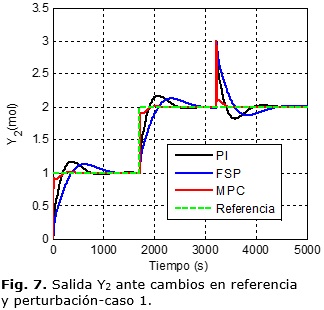
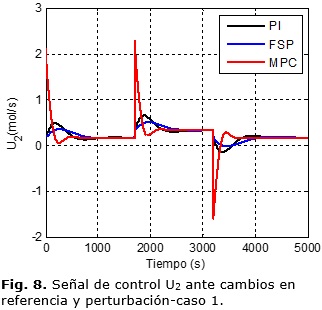
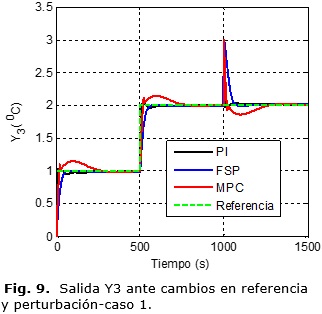
En las Figuras 5, 7 y 9 se muestran las respuestas de Y1, Y2 y Y3, respectivamente luego de implementar las estrategias de control PI, FSP y MPC. Se considera para Y1 y Y2 un cambio en la referencia a los 0 y 1700s y una perturbación en el flujo de alimentación a los 3200s; y para Y3 a los 0 y 500s en la referencia y a los 1000s en la perturbación. Todos los cambios en las referencias y perturbaciones considerados son escalones unitarios. En las Figuras 6, 8 y 10 se muestran las señales de control U1, U2 y U3, respectivamente.
Se puede notar que con las tres estrategias se logra seguir los cambios de referencia establecidos y el rechazo a perturbaciones. La señal de control U1, se comporta de manera similar para las tres estrategias diseñadas; la acción de control U2 presenta mayor sobrepaso para el caso del MPC, este comportamiento puede mejorarse con la inclusión de restricciones en la entrada, pero provocaría un deterioro del tiempo de establecimiento, por lo cual debe valorarse dependiendo de los objetivos de control particulares y las características propias de los actuadores del proceso; para el caso de la entrada U3, la estrategia de control PI presenta sobrepasos elevados, lo cual puede exigir demasiado del actuador, pudiendo no ser realizable en determinadas situaciones en la práctica.
3.2.- Proceso inestableLos resultados de simulación que se muestran a continuación se llevan a cabo considerando el MSP* (perturbación L después de la planta, sin Gc2, ver Figura 3) y MSP (ver Figura 2 pero con perturbación L después de la planta, con Gc2), sobre un proceso multivariable con inestabilidad y presencia de retardo de tiempo. Se comparan dichos resultados atendiendo a sus respuestas para cambios en el valor deseado, rechazo a perturbaciones en la carga e incertidumbre en los parámetros del modelo de retardo y ganancia.
Caso de estudio 2: Se considera la siguiente planta inestable, donde los valores de los retardos y las constantes de tiempo se expresan en segundos, asumiendo que el modelo de la planta sin incertidumbres es el siguiente [9]:
Se aplica el método de MGR y se determina la matriz Λ (ecuación (23)), donde se observa que el mejor acople es Y1-U1 y Y2-U2. Se implementan las estrategias MSP y MSP* en Simulink-Matlab® empleando para Gc controladores PI ajustados por el método de IAE y para Gc1 y Gc2 controladores P. La Tabla 2 muestra los parámetros de los controladores.
Caso 2a: El modelo es igual a la planta: ![]() m= P, Ĥm= H
m= P, Ĥm= H
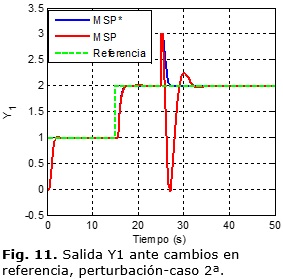
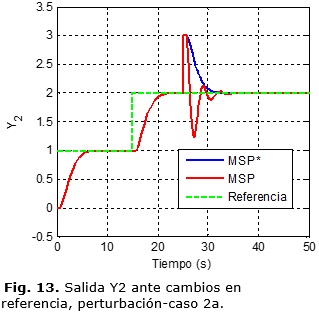
Las Figuras 11 y 13 muestran las respuestas de Y1 y Y2 luego de implementar las estrategias MSP y MSP*. Se considera para ambas variables un cambio escalón unitario en la referencia a los 0s y a los 15s y la ocurrencia de una perturbación tipo paso de magnitud 1 a los 25s. Se puede notar que, ante una perturbación en la carga, para el MSP existe un incremento en la magnitud de la acción de control proporcional a la magnitud de esta perturbación, tal y como se demostró en la ecuación (10). Por otro lado, al eliminar el controlador Gc2 (MSP*), no se afecta el comportamiento ante cambios en la referencia; sin embargo, mejora notablemente el desempeño ante perturbaciones a la salida de la planta, esta situación se evidencia en las Figuras 11, 12, 13 y 14.
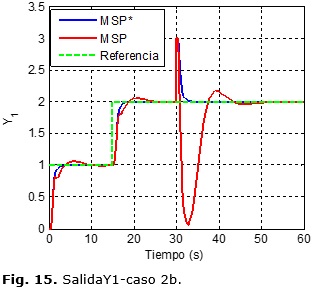
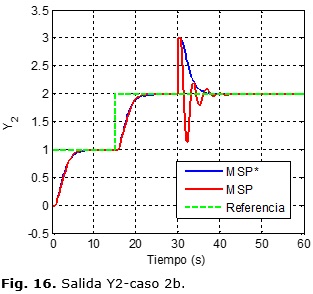
Caso 2b: Incertidumbres en los valores de ganancia del modelo: ![]() m ≠ P, Ĥm = H. Las Figuras 15 y 16 muestran las respuestas de Y1 y Y2 para este caso.
m ≠ P, Ĥm = H. Las Figuras 15 y 16 muestran las respuestas de Y1 y Y2 para este caso.
Caso 2c: Incertidumbre en los valores de retardo del modelo:![]() m = P, Ĥm ≠ H. Las Figuras 17 y 18 muestran las respuestas de Y1 y Y2 para este caso.
m = P, Ĥm ≠ H. Las Figuras 17 y 18 muestran las respuestas de Y1 y Y2 para este caso.
![]()

En cada uno de los casos mostrados se evidencia el buen comportamiento de MSP* ante cambios de referencia, ante perturbaciones de la carga e incertidumbres en el retardo y la ganancia del modelo. En la sección de análisis de los resultados se muestran los índices de desempeño y las especificaciones de la respuesta temporal para cada caso.
3.3.- Proceso de fase no mínima
Caso de estudio 3: Modelo de estudio académico
En este caso de estudio se utiliza un modelo de fase no mínima que cuenta con dos variables controladas (Y1, Y2) y dos variables manipuladas (U1, U2).Los valores de los retardos y las constantes de tiempo se expresan en segundos. La dinámica del modelo planteado está descrita por:
A dicho modelo se le aplica el método MGR y se obtiene la matriz Λ (ecuación (25)), con la cual se determina que el mejor apareamiento entre las variables controladas y las variables manipuladas está dado por: Y1-U2 y Y2-U1. Para este caso de estudio se implementan las estrategias de control FSP y MPC.
La Tabla 3 muestra los parámetros de los controladores para cada estrategia. El FSP se diseña a partir de la Figura 1 y se emplean controladores PI según las ecuaciones (2) y (3). Se emplean los siguientes filtros Fr (ecuación (1)):
![]()
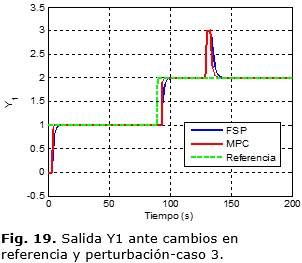
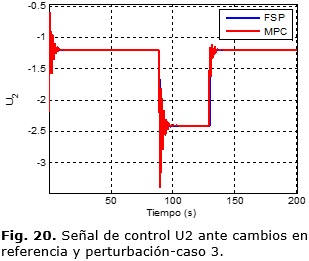
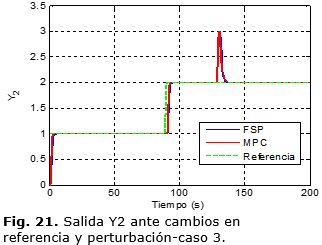
En las Figuras 19 y 21 se muestran las respuestas de las salidas Y1 y Y2, respectivamente, para ambas estrategias de control ante cambios en la referencia y perturbación. Se considera un cambio escalón unitario en la referencia a los 0 y los 90s y en la perturbación a los 130s. Se observa que con ambas estrategias se logra seguir cambios de referencia establecidos y el rechazo a perturbaciones. Las Figuras 20 y 22 muestran las señales de control U1 y U2 respectivamente, en las mismas se puede notar que el FSP demanda menor esfuerzo por parte del actuador y que el MPC presenta oscilaciones bruscas que pueden afectar seriamente el actuador, aunque esta señal puede restringirse esto sería sacrificando la respuesta del sistema.
3.4.-Análisis de los resultados
Para presentar los resultados obtenidos en este trabajo se muestran en las Tablas 4, 5 y 6 el comportamiento de las estrategias utilizadas para cada caso de estudio, para ello se calculan los índices de desempeño: la Integral del Error Absoluto (IAE), la Integral del Valor Absoluto de la Salida de Controlador (IAU), además, de las especificaciones de la respuesta temporal: el Máximo sobrepaso (Mp) y el Tiempo de establecimiento (Ts - con el criterio del valor del tiempo en que la respuesta entra en la banda de ± 5% del valor de estado estacionario). Para el cálculo de dichas especificaciones, en los casos 1 y 3 se toma el primer cambio en la referencia y para el caso 2 se toma el cambio en la perturbación, pues es donde se evidencia más la superioridad del MSP*. De esta manera, si se va a aplicar una de estas estrategias se puede elegir cuál de ellas implementar teniendo en cuenta los objetivos de control reales.
Para el sistema estable-caso1 (Tabla 4) se evidencia que para salidas Y1 e Y2, (presentan en el modelo valores elevados de retardo de tiempo), la estrategia MPC muestra un mejor comportamiento, lo cual reafirma la característica predictiva del mismo. Para la salida Y3, donde el modelo de la pareja seleccionada (Y3-U3) no presenta retardo de tiempo, la estrategia más eficiente según los índices de desempeño mostrados es el controlador PI. Estos resultados coinciden con las Figuras de la 5 a la 10.
Para el sistema inestable-caso 2a, 2b, 2c (Tabla 5) se observa que para la salida Y1 los índices de desempeño de MPS* son menores a los de MSP, resaltando el IAE con valores de 6.23, 6.68, 7.00 y el IAU con 43.73, 44.47, 48.20 y para la salida Y2 el IAE con valores de 18.03, 18.90, 18.25 y el IAU con valores de 4.51, 4.53, 9.51. Como se puede notar en la Tabla 5 el tiempo de establecimiento del MSP* es menor que el MSP además de que, según el criterio IAU, también requiere menos esfuerzo de control. Estos resultados coinciden con las Figuras de la 11 a la 18.Para el sistema de fase no mínima-caso 3 (Tabla 6) se muestra que en todos los índices de desempeño ambas estrategias presentan un comportamiento similar, aunque atendiendo al criterio IAE la estrategia de MPC es superior al FSP. Estos resultados coinciden con las Figuras de la 19 a la 22.
4.- CONCLUSIONES
Se llevó a cabo el diseño y simulación de las estrategias de control PI, FSP, MPC, MSP y MSP* utilizando como herramienta de software el Matlab®. Estas estrategias se aplicaron a distintos modelos MIMO con retardo de tiempo lo que permitió determinar, según las características dinámicas del modelo, cuál de estas tiene un mejor comportamiento para seguir cambios en la referencia y rechazar perturbaciones, así como, en el caso 2, ante incertidumbres presentes en el modelo. A partir de los resultados mostrados en las simulaciones, de las especificaciones de la respuesta temporal y con los índices de desempeño calculados se concluye que para sistemas estables el controlador predictivo tuvo un comportamiento superior y para procesos inestables con perturbación en la carga el MSP* brindó mejores prestaciones. Finalmente, para sistemas de fase no mínima el FSP y el MPC tienen un comportamiento similar.
Se propone una modificación al MSP para perturbación en la carga: MSP*, este se aplica a una planta inestable y se demostró que mejora notablemente el comportamiento en el rechazo a perturbaciones en la carga. Además, se evidenció la robustez de dicha estrategia para las incertidumbres en la ganancia y en el retardo presentes en el modelo, lo cual es muy importante en este tipo de estrategias de control que dependen de un modelo del sistema ya que en la práctica industrial siempre habrán diferencias entre la planta real y el modelo. Este trabajo tendría una aplicación práctica en cualquier industria, principalmente en la industria química pues los reactores, torres de destilación, evaporadores presentan elevados retardos de tiempo.
]]> REFERENCIAS
2. Benítez I, Rivas R. Predictor de Smith: revisión y desafíos. Revista Ingeniería Electrónica, Automática y Comunicaciones. 2017;38(1):33-47.
3. Normey Rico J, Camacho EF. Control of Dead-time Processes. London: Springer; 2007.
]]>7. Santos T, Limon D, Normey-Rico J, Alamo T. On the explicit dead-time compensation for robust model predictive control. Journal of Process Control. 2012;22:236-46.
]]>12. Özbay H, Bonnet C, Fioravanti A. Diseño de un controlador PID para sistemas de orden fraccionario con retardo de tiempo. Journal of Process Control. 2012;61:18–23.
14. De La Cruz F, Camacho O. Controlador de Modos Deslizantes basado en Predictor de Smith y Modelo de Segundo Orden para Procesos con Elevado Retardo. Revista Politécnica. 2015;35(2):18-24.
]]> ]]>23. Mathwork. Guía de usuario/Matlab.2015.
24. Normey Rico J, Camacho EF. Multivariable generalised predictive controller based on the Smith predictor. IEE Proceedings-Control Theory Applications. 2000;147(5):538–46.
]]>
Recibido: 18 de agosto del 2016
Aprobado: 11 de marzo del 2017
Ernesto Estremera Toledo, Ingeniero en Automática, Universidad de Oriente, Santiago de Cuba, Cuba. Correo electrónico: estremera@uo.edu.cu
]]>



 ]]>
]]>

 ]]>
]]>

 ]]>
]]>

 ]]>
]]>