ARTÍCULO ORIGINAL
Modelo de motor de inducción agregado aplicado en caracterización energética
Aggregate induction motor model applied in energetic characterization
Ignacio Romero-RuedaI, Bárbara M. Pérez-MenaI, Julio Rafael Gómez-SarduyII
I Instituto Superior Minero Metalúrgico de Moa, ISMM. Holguín. Cuba. ]]> II Universidad de Cienfuegos. Centro de Estudio de Energía y Medio Ambiente, CEEMA. Cienfuegos. Cuba.
RESUMEN
La caracterización energética de motores de inducción se dificulta por el volumen de mediciones y cálculo a realizar cuando el número de motores es superior a la decena. En este trabajo se desarrolló un modelo de motor de inducción agregado que permite la caracterización energética equivalente al grupo de motores. El modelo de motor de inducción agregado se obtuvo por balance de potencia entre el equivalente y los motores individuales en régimen estacionario. Se utilizó la herramienta SimPowerSystem de MATLAB en la simulación del motor agregado y los motores individuales para determinar el comportamiento energético ante las cargas acopladas y comparar los resultados. Los cambios en las cargas de los motores individuales originaron respuestas en las magnitudes del motor agregado con errores menores del 5 % comparada con las respuestas resultantes del grupo de motores, concluyendo que el agregado respondió satisfactoriamente y existe una equivalencia con fines energéticos al grupo de motores.
Palabras claves: motor de inducción, motor de inducción agregado, caracterización energética.
ABSTRACT
The energetic characterization of induction motors is difficult by the volume of measurement and calculation to carry out when the number of motors is bigger than the tens. In this work developed a model of aggregate induction motor that allows the equivalent energy characterization to a group of motors. The model of aggregate induction motor was obtained by the balance of powers between the equivalent one and the individual motors in steady-state. Used the toolbox SimPowerSystem of MATLAB the aggregate motor and the individual motors are simulated, to determine the energy behavior before the coupled loads and to compare the results. Changes in the individual motors loads originated answers in the magnitudes of the motor aggregate with errors smaller than 5% compared with the resulting answers of the group of motors, showing that the aggregate responds satisfactorily and exists an equivalence with energy conclusions to the group of motors.
Key words: induction motors, aggregate induction motors, energetic characterization.
]]>
INTRODUCCIÓN
No siempre las cargas accionadas por motores de inducción presentan las mismas características, y en muchas ocasiones se dificulta obtener la potencia que demandan del motor eléctrico, debido a las dificultades de las mediciones de parámetros no eléctricos de forma general. En estos casos para evaluar la potencia en la carga se puede determinar la eficiencia del motor por algún método conocido. Cuando se trata de grupos de cargas esta situación se agudiza y resulta prácticamente imposible establecer un modelo de carga que tome en consideración la diversidad de las mismas. En este caso resulta necesario la utilización del motor agregado y para este evaluar el comportamiento energético, caracterizando la carga mecánica acoplada desde un solo motor [1].
Si las cargas se alimentan desde puntos comunes, existe la posibilidad de agrupar por barras o cargas específicas a grupos de motores que sean sustituidos por uno equivalente, y a partir de este determinar el rendimiento y las características de comportamiento de una barra o grupo [2]. Este motor aunque no existe físicamente, constituye un modelo representativo del grupo de motores individuales que lo componen.
El cálculo de las características de comportamiento y la simulación de un grupo de motores de inducción para el estudio de un sistema puede resultar tedioso y consumir mucho tiempo, para reducir el tiempo de computación se usa la representación de grupos de motores en uno o más motores agregados [3].
De forma general existen dos métodos para obtener el modelo agregado a partir de un grupo de motores de inducción conectado a una barra común: un primer método parte del conocimiento de los parámetros del modelo de circuito equivalente escogido para los motores individuales [4], con el inconveniente de su disponibilidad. El resultado final de este método son los parámetros del circuito equivalente del motor agregado. El segundo método consiste en realizar en base a las consideraciones del funcionamiento en paralelo, similitudes de magnitudes totales de los motores individuales a las del motor equivalente o agregado [5-8] partiendo de un balance de potencia. Este método es apropiado para representar el efecto de motores de inducción conectado a una barra común de un sistema eléctrico de potencia.
La validación del método de agregación se realiza comparando los resultados obtenidos del motor agregado con la suma de los motores individuales [9, 10]. Se toma que la potencia de salida del motor agregado es igual a la potencia total desarrollada por los motores individuales [7, 11]. Este último es el criterio básico para el análisis de la carga equivalente con motores de inducción a partir del modelo de motor agregado.
Para poder caracterizar energéticamente un motor o un conjunto de motores en forma de motor agregado, es necesario determinar las características que dan la eficiencia, la demanda de potencia reactiva, el factor de potencia, la corriente del estator y la velocidad en función de la potencia de salida.
En este trabajo se presenta un modelo de motor de inducción agregado con los parámetros del circuito equivalente, orientado a simplificar el tiempo de cómputo para la determinación del comportamiento energético del grupo de motores en régimen estacionario en industrias con elevado número de motores de inducción agrupados en barras con alimentadores comunes. ]]>
MÉTODOS
Modelo matemático y simulación del motor agregado
a) Condiciones para formar agregados a partir de motores de inducción
La idea central del modelo de motor agregado radica en obtener un motor equivalente, en cuanto a su comportamiento, al grupo de motores escogido para formarlo, donde las características del mismo presentan semejanzas a la de un motor real de esa potencia.
Actualmente los motores de inducción se encuentran en las más diversas aplicaciones, industriales, sector residencial y los servicios. Para ser agrupados en equivalentes, formando los agregados, y que sirvan con fines energéticos tienen que cumplir determinadas condiciones, las cuales se enumeran a continuación:
1- Motores de inducción en baja tensión, (480 V industrial).
2- Conexión directa a barra, sin que medie ningún elemento de fuerza y/o control, (variadores de velocidad, reactores y transformadores de potencia fundamentalmente).
3- Pertenecen a una misma barra, sin compensación individual de reactivo. ]]>
4- Están operando en régimen estable.
5- Se consideran despreciables los procesos transitorios normales de cambio en la carga.
6- La barra presenta un alimentador principal.
7- No se consideran los motores en reservas.
La existencia de motores de diferentes potencias, tipos de cargas que accionan, velocidades, etc., conectados a una misma barra de potencia, hace difícil emitir un criterio único de agrupamiento, se parte de la existencia de un alimentador común, que permita las mediciones generales para obtener el modelo agregado ajustados a las condiciones reales, lo cual servirá en primera instancia para realizar una valoración sobre el uso de la energía en ese alimentador o barra.
Con los datos nominales de cada motor individual, aplicando el criterio de motor agregado por balance de potencia entre los motores individuales y el equivalente, se obtienen los parámetros nominales de los motores agregados.
El análisis del comportamiento del motor agregado en el punto de funcionamiento cae en la zona lineal de la característica mecánica del mismo y por tanto se desprecia el efecto de la saturación magnética y el efecto pelicular. Será caracterizado por los mismos parámetros que un motor de simple jaula y siempre se utilizará la conexión en estrella para el devanado del estator.
Las dependencias del rendimiento, factor de potencia, potencia de entrada, corriente del estator, pérdidas totales y velocidad para diferente estados de cargas del motor agregado constituyen las características de funcionamiento principales, que permiten caracterizar el uso de la energía eléctrica en la barra de potencia a través del motor agregado.
b) Derivación del modelo del motor agregado
Dentro de las especificaciones estándares más importantes de un motor de inducción que determinan su comportamiento se pueden enumerar las siguientes [7]: Potencia nominal (Pni) en W, Tensión nominal (Uni) en V, Corriente nominal (Ini) en A, Factor de potencia nominal (fpn), Eficiencia nominal (ηni), Frecuencia nominal (fni) en Hz, Velocidad del rotor (Ωni) en rad/seg, Corriente a rotor bloqueado en fracción de la nominal (Irbi/Ini), Momento a rotor bloqueado en fracción del nominal (Mrbi/Mni), Momento máximo en fracción del nominal (Mmi/Mni), Número de pares de polos (pi) y Momento de inercia del rotor (Ji) en kg.m2. ]]>
Para establecer un modelo de motor agregado, válido para caracterización energética, en base a un balance de potencias, tanto externa como interna del motor agregado y los motores individuales que lo forman, se realizan determinadas consideraciones de forma general, las cuales se analizan a continuación.La potencia de entrada del motor agregado es igual a la suma de las potencias de entradas de los motores considerados. Existe un balance de potencia activa y reactiva por separado para obtener la potencia aparente total dado por las ecuaciones 1 y 2.
Sag y Sti son las potencias aparentes absorbidas por el motor agregado y la total de los motores considerados, Vak y Vik son las magnitudes de tensión del motor agregado y de los motores considerados para cada una de las fases, I1ak y I1ik son las magnitudes de corrientes del motor agregado y de los motores considerados para las tres fases, y n es el número de motores considerados.
Si se considera que las tensiones, por fases, de alimentación del motor agregado son las mismas que la de la barra de tensión, ecuaciones 1 y 2, se puede plantear en base a las corrientes como la ecuación 3,
donde: Iag.a, Iag.r son las componentes activa y reactiva del motor agregado, Ii.a, Ii.r son las componentes activa y reactiva de los motores individuales, las cuales tienen que ser iguales entre si según (3), desarrollando por separado cada componentes, el factor de potencia para un sistema trifásico balanceado fpag, se obtiene por la ecuación 4.
La potencia de salida del motor agregado es la suma de las potencias de salidas de los motores considerados individuales, mientras las tensiones en los terminales del motor agregado sean iguales a las tensiones en la barra de potencia la eficiencia del motor agregado para un sistema trifásico, viene dado por la ecuación 5, ]]>
donde ηag y ηi son la eficiencia del motor agregado e individual respectivamente
El deslizamiento nominal del motor agregado, snag viene dado por La ecuación 6,
donde ωo es la frecuencia angular del sistema de potencia en rad; Ωag la velocidad angular del rotor para el motor agregado en rad/s; p el número de pares de polos del motor agregado.
Las pérdidas por fricción y batimiento del aire, Pfw, se expresan como una fracción de la capacidad de la máquina kfw, y considerando que varían con el cuadrado de la velocidad se calculan por la ecuación 7.
Las pérdidas adicionales del rotor son estimadas por la norma IEC 60034-2-1 del 2007, [12]. ]]>
La potencia electromagnética y las pérdidas en el circuito del rotor del motor agregado son iguales a la suma de la potencia electromagnética y las pérdidas en el circuito del rotor de los motores considerados. Manteniendo estas relaciones constantes se obtiene el deslizamiento para el motor agregado por la ecuación 8,
donde: Pem es la potencia electromagnética de los motores considerados; si y sag deslizamiento de los motores considerados y del agregado respectivamente.
El par electromagnético del motor agregado, Mema, se puede obtener a través del balance de pérdidas eléctricas en el rotor por la ecuación 9,
resultando una ecuación con dos incógnitas (Mema y el número de pares de polos, p).
Para determinar el número de pares de polos inicial se formulan las siguientes reglas:
Una vez realizada esta selección se determina un valor preliminar para la velocidad sincrónica del motor agregado, Ωag, por la ecuación 10, a través de la potencia mecánica obtenida en base a las pérdidas por fricción y batimiento del aire calculadas por:
Donde Psi, Pfwi, padi, si es la potencia de salida, pérdidas mecánicas, pérdidas adicionales del rotor y deslizamiento de cada motor individual, respectivamente.
Con esta velocidad angular de rotación preliminar, para la frecuencia de 60 Hz, se selecciona el número de polos del motor agregado, la velocidad sincrónica y el deslizamiento nominal, se recalcula la velocidad del rotor, por la relación básica entre ellos, la cual será utilizada para estimar la velocidad nominal del motor agregado:
El par electromagnético para el deslizamiento calculado no coincide con la suma de los pares individuales y puede ser establecido como:
De forma similar existe un balance de potencia cuando se desarrolla el par máximo, entre el motor agregado y la suma de los motores individualmente. Para cada motor individual se tiene la ecuación 13 del par relativo de Kloos y el deslizamiento crítico por la ecuación 14, [13].
donde: Mm es el momento máximo en Nm; sm es el deslizamiento crítico; α, coeficiente de corrección.
Una vez obtenidos estos coeficientes, se pueden calcular el momento electromagnético máximo del motor agregado a partir de (15) como:
Para implementar el procedimiento descrito, se desarrolla un algoritmo, debido al volumen de cálculo que contiene.
c) Cálculo de los parámetros del motor agregado
Para obtener los motores agregados por cada barra, se necesita de los datos nominales de los motores individuales. Las ecuaciones 1 a la 15 constituyen el centro del cálculo de los parámetros nominales del motor agregado, [7]. Adicionalmente se inserta un procedimiento para obtener los parámetros del circuito equivalente, que incluye la determinación de los parámetros necesarios para la simulación del motor asincrónico. ]]>
Los resultados se presentan en formato de texto en ficheros generados por la misma aplicación: datos nominales de los agregados; parámetros nominales del circuito equivalente en T; y parámetros de simulación de cada agregado.En la literatura existen procedimientos para determinar los parámetros del circuito equivalente del motor de inducción [14, 15] y algunos de ellos incluyen la resistencia del estator como principal objetivo [16, 17].
En este material los parámetros del circuito equivalente del motor de inducción se obtienen partiendo de los datos nominales por el algoritmo desarrollado al respecto [18].
Los motores agregados pueden estar formados por motores de inducción directamente, generalmente agrupados en los centros de control de motores en las industrias, en lo delante de 1er escalón; por motores agregados del 1er escalón, en lo adelante de 2do escalón; y así sucesivamente o en configuración mixta. A medida que aumenta el nivel del escalón aumenta el número de motores que forman el agregado y la potencia del mismo teniendo mayor influencia en la potencia total instalada en la barra eléctrica.
Los resultados de obtener el agregado, de segundo escalón o superior, a través de todos los motores de inducción directamente o utilizar los agregados de 1er nivel dan iguales resultados.
d) Simulación
Como caso de estudio se presentan los resultados obtenido para el motor agregado (Magg) formado por los agregados de 1er escalón M1 (Transportadores de bandas, 6 motores), M4 (Bombas para la lubricación, 4 motores) y M5 (Ventiladores de aire primario y pulverización, 3 motores). Tres motores que caracterizan energéticamente al grupo de motores de inducción [19]. En este caso representan al secadero de mineral número 4 de la sección de secadero en la planta de preparación de mineral de la planta de Níquel Ernesto Che Guevara de Moa. Los datos nominales aparecen en la tabla 1 y los datos para la simulación en la tabla 2, en este caso se tienen dos motores de 4 polos y uno de 3 polos.
Para la simulación a partir de los parámetros nominales del circuito equivalente se obtienen las inductancias para la simulación, tabla 2, empleando el Toolbox SimPowerSystems de Matlab.
]]>
Los mecanismos se caracterizan por el hecho de que sus momentos son función de la velocidad. Esta dependencia puede ser expresada por la ecuación 16, donde Mo es el momento de marcha en vacío; Mnom momento para carga nominal; ω velocidad angular del motor; ωom velocidad angular nominal; n, índice que depende de la estructura del mecanismo; n = (-1, 0, 1 y 2), [14].
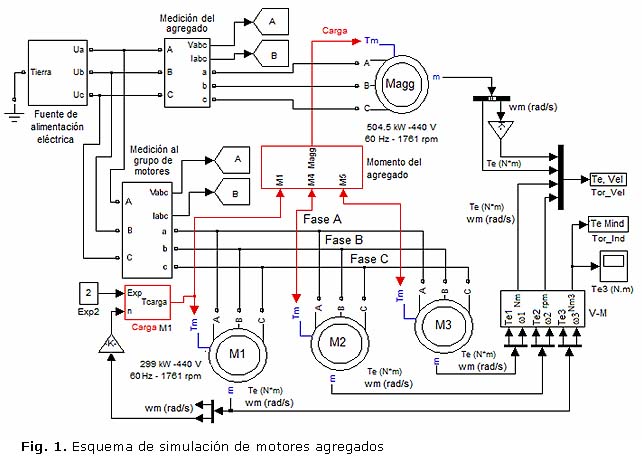
La figura 1 brinda la posibilidad de utilizar la ecuación 16 a través del subsistema de carga, para cada motor individual y también para el agregado, aunque para este último la carga es una combinación de las cargas individuales dada por la ecuación 17.
Donde p es el número de pares de polos para el motor agregados y pi para los individuales i; Mag es el momento para el motor agregado y Mi para los individuales i.
Aplicando la ecuación 17 para régimen nominal se obtiene:
]]>
El esquema de la figura 1 permite realizar la simulación y comparación de resultados entre los motores agregados de primer escalón (M1, M4 y M5) y el superior (M28), utilizando el Toolbox SimPowerSystems de Matlab. Los parámetros eléctricos potencias activa y reactiva, tensión y corriente se miden por los bloques "Medición del agregado" y "Medición al grupo de motores" para el agregado y los motores individuales respectivamente. Las magnitudes mecánicas de velocidad y momento electromagnético se miden a cada motor por el de bloque de medición propio. El momento y la velocidad de cada motor individual se conectan al subsistema M-V que permite visualizar y almacenar estas variables. El subsistema "Momento del agregado" utiliza la ecuación 17 para formar el momento de carga del agregado a partir de la carga individual de cada motor, formado por subsistemas "Carga M1" según se muestra para el motor M1.
En el trabajo de caracterización energética de forma individual necesitaría de repetir el procedimiento en 13 ocasiones, número total de motores que integra el agregado, lo cual aumenta el tiempo de realización y volumen de cálculo a realizar.
RESULTADOS Y DISCUSIÓN
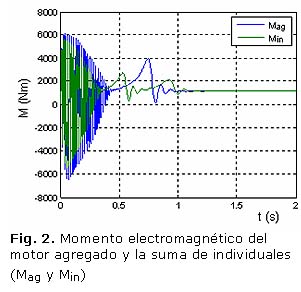
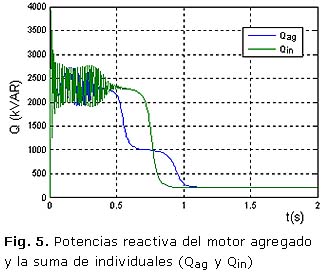
Para demostrar la equivalencia del motor agregado y los motores individuales se presentan los resultados para el momento electromagnético, factor de potencia, potencias activa y reactiva desde la figura 2 hasta la figura 4. Después del tiempo t >1.5 s, se considera que el motor opera en régimen estacionario, y para establecer la comparación en valores se toman los valores promedios de cada magnitud en este régimen, las diferencias absolutas y en porciento con respecto al motor agregado. Desde la figura 5 hasta la figura 8 se toman tres cargas y por tanto se analizan tres intervalos de tiempo.
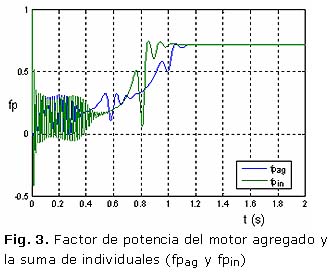
Para la figura 2 el momento electromagnético del motor agregado Mag se establece a un valor de 1167.18 Nm, y el equivalente de los motores individuales Min a 1165.54 Nm, con una diferencia absoluta de 1.642 Nm y con respecto al agregado 0.141 %. De igual manera se refleja en la figura 3 el factor de potencia del motor agregado con un valor de 0.715 pu y para los motores individuales 0.719, con una diferencia absoluta de 0.004. ]]>
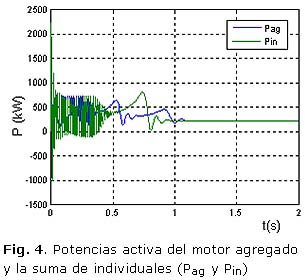
La figura 4 muestra que la potencia activa del motor agregado se establece a un valor de 222.74 kW, y el equivalente de los motores individuales a 221.98 kW, con una diferencia absoluta de 0.755 kW y con respecto al agregado 0.339 %. De igual manera se refleja en la figura 5 que la potencia reactiva del motor agregado tiene un valor de 217.70 kVA, y para los motores individuales 214.63 kVA, con una diferencia absoluta de 3.066 kVA y con respecto al agregado 1.41 %.En la carga representada la velocidad promedio del motor agregado es de 1784.8 rev/min. Las cargas pueden ser de un solo carácter o mixta, para régimen estacionario no tiene significación alguna, se comporta como un valor único en el tiempo.
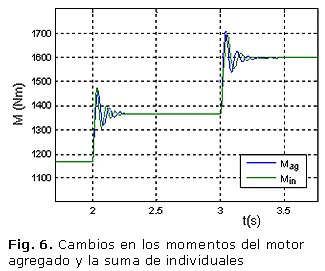
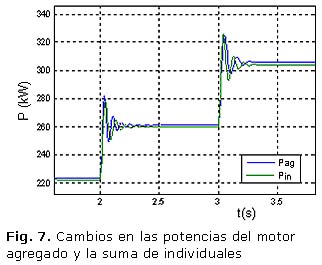
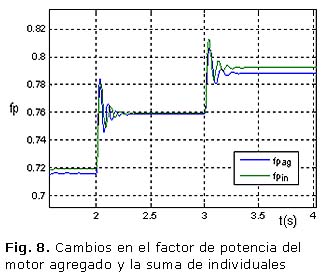
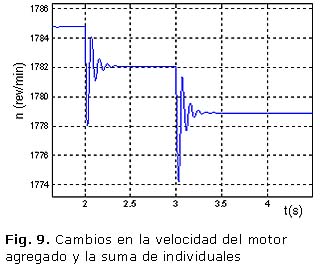
Las variaciones que ocurren en cada motor individual se refleja en el comportamiento de las diferentes variables del motor agregado como se observa desde la figura 6 hasta la figura 9 para tres estados de cargas diferentes producidos intencionales a 1.5 s, 2 s y 3 s, en diferentes motores individuales.
Las diferencias relativas entre las diferentes magnitudes para el motor agregado y la suma de los individuales, en el régimen estacionario no superan el 3%, en todos los casos, verificando la utilización del motor agregado como equivalente del grupo. ]]>
En la tabla 3 se presentan los resultados numéricos para los tres estados de cargas en valores promedios para la potencia activa, factor de potencia, momento y velocidad, que se representan desde la figura 6 hasta la figura 9. Al igual que en los casos anteriores se observan diferencias absolutas bajas en las diferentes magnitudes, demostrando una vez más que el motor agregado responde de forma satisfactoria a los cambios que experimenten los motores individuales.Durante el funcionamiento de los motores asincrónicos en el sitio, la carga está determinada por la exigencia mecánica en el eje, de acuerdo a los requerimientos del proceso productivo, y los cambios que experimentan las magnitudes del estator son respuestas a estas cargas, por tal motivo es necesario identificar la potencia real que entrega cada motor, con lo cual se puede determinar el momento a insertar durante la simulación. Para el motor agregado, como no presenta soporte físico compacto, es determinante un método que permita obtener el momento en el eje y demás características de funcionamiento, de forma precisa y con cierto nivel de exactitud. La eficiencia y la potencia demandada junto al factor de carga constituyen los principales parámetros que caracterizan el comportamiento energético del motor agregado.
CONCLUSIONES
1- Se establecen las condiciones que deben cumplir los motores de inducción para formar el motor agregado cuando el objetivo sea obtener un equivalente que caracterice energéticamente al grupo de motores en barra eléctrica de baja tensión.
2- Durante la simulación, los cambios en las cargas de los motores individuales provocan respuestas en las magnitudes del motor agregado, con errores menores del 3 % comparada con la resultante del grupo de motores, respondiendo satisfactoriamente aún en presencia de cargas de diferentes características.
3- La metodología empleada en este trabajo es fácil de implementar por medio de cómputo, reduciendo el tiempo si se compara en analizar cada motor individualmente, por tanto esta propuesta es muy efectiva en la modelación de cargas con elevado número de motores en sistemas eléctricos de baja tensión. ]]>
REFERENCIAS
1. de Armas, M., Gómez, J. y Viego, P. "Evaluación de Motores en Servicio". En: Convención de Ingeniería Eléctrica CIE2011. Santa Clara, Cuba. Junio 14 al 18 2011. ISBN 978-959-250-685-5.
2. Pillay, P., Sabur, S. y Haq, M. "A model for induction motor aggregation for power system studies". Electric Power System Research. 1997, vol. 42, nº 3, p. 225-228. ISSN 0378-7796.
3. Aree, P. "Effects of Static and Dynamic Load Models on Power Svstem Load Representation". Thammasat lnt. J. Sc. Tech. 2002, vol. 7, nº 3, p. 1-7. [Consultado el: 18 de diciembre de 2010] Disponible en: http://www.tijst.net/issues/2002/no3/2002_V7_No3_1.PDF . ISSN 0859-4074.
4. Hongbin, Z., Qiyu, L. y Xiaohua, W. "The aggregation method of induction motors with distribution network". En: Intelligent Systems and Knowledge Engineering (ISKE), International Conference on Hangzhou. China. 2010. p. 445-449. ISBN 978-1-4244-6791-4.
5. Louie, K. W. "Aggregating Induction Motors in a Power System Based on their Standard Specifications". En: Power System Technology, PowerCon 2006. International Conference, Winnipeg, MB, Canadá 2006. p. 1-8. ISBN 1-4244-0111-9.
6. Louie, K. W. y Wilson, P. "Aggregation of Induction Motors Based on their Specifications". En: Electrical and Computer Engineering, CCECE '06. Canadian Conference. Ottawa, Ont., Canadá 2006. p. 803 - 806. ISBN 1-4244-0038-4.
7. Kwok-Wai, L. "A New Way toRepresent the Aggregate Effects of Induction Motors at a Same Bus in a Power System". International Journal of Applied Science and Engineering. 2006, vol. 4, nº 1, p. 91-102. ISSN 1727-2394.
8. Louie, K. W., Marti, J. R. y Dommel, H. W. "Aggregation of Induction Motors in a Power System Based on Some Special Operating Conditions". En: Electrical and Computer Engineering, CCECE 2007. Vancouver, BC., Canadá. 2007. ISBN 1-4244-1021-5.
9. Lem, T. Y. J. y Alden, R. T. H. "Comparison of experimental and aggregate induction motor responses". IEEE Trans. Power Syst. 1994, vol. 9, nº 4, p. 1895-1900. ISSN 0885-8950. DOI 10.1109/59.331447
10. Karakas, A., Li, F. y Adhikari, S. "Aggregation of multiple induction motors using MATLAB-based software package". En: Power Systems Conference and Exposition, PSCE'09, IEEE/PES. Seatle, WA., USA. 2009. p. 1-6. ISBN 978-1-4244-3811-2.
11. Pedra, J., Sainz, L. y Córcoles, F. "Study of Aggregate Models for Squirrel-Cage Induction Motors". IEEE Transactions on Power Systems. 2005, vol. 20, nº 3, p. 1519-1527. ISSN 0885-8950. DOI 10.1109/TPWRS.2005.852073
12. IEC . Rotatory Electrical Machines part 2-1, Standard Methodes For Determiny Losses And Efficient From Tests. IEC 34-2. Switzerland: Standard IEC, 2007.
13. Venikov, V. A. Procesos transitorios electromecánicos en los sistemas eléctricos de potencia. Moscú: Editorial Mir, 1988. 502 p. p. ISBN 5-03-000084-4.
14. Huang, K. S. y Wu, Q. H. "Effective identification of induction motor parameters based on fewer measurements". IEEE Transactions on Energy Conversion. 2002, vol. 17, nº 1, p. 55-60. ISSN 0885-8969. DOI 10.1109/60.986437
15. Wang, K., Chiasson, J., Bodson, M., et al. "A Nonlinear Least-Squares Approach for Identification of the Induction Motor Parameters". IEEE Transactions on automatic Control. 2005, vol. 50, nº 10, p. 1622-1628. ISSN 0018-9286. DOI 10.1109/TAC.2005.856661
16. Martinez, J. A., Johnson, B. y Grande-Moran, C. "Parameter Determination for Modeling System Transients-Part IV: Rotating Machines". IEEE Transaction on Energy Conversion. 2005, vol. 20, nº 3, p. 2063 - 2072. ISSN 0885-8977. ]]>
17. Zamora, J. L. y García-Cerrada, A. "Online Estimation of the Stator Parameters in an Induction Motor Using Only Voltage and Current Measurements". IEEE Transactions on Industry Applications. 2000, vol. 36, nº 3, p. 805 - 816. ISSN 0093-9994. DOI 10.1109/28.845056
18. Romero, R. I. y Pérez, M. B. "Algoritmo para la determinación de los parámetros del motor de inducción por datos nominales". Ingeniería Energética. 2008, vol. XXIX, nº 3, p. 10- 17. [Consultado el: 24 de junio de 2011] Disponible en: http://rie.cujae.edu.cu/index.php/RIE/article/view/47.pdf. ISSN 1815-5901.
19. Parveen, T. y Ledwich, G. "Decomposition of aggregated load: Finding induction motor fraction in real load". En: Power Engineering Conference, AUPEC '08. Sydney, NSW. Australia. 2008. p. 1-6. ISBN 978-0-7334-2715-2.
Recibido: 12 de enero de 2012.
Aceptado: 11 de junio de 2012.
]]>
Ignacio Romero-Rueda. Instituto Superior Minero Metalúrgico de Moa, ISMM. Holguín. Cuba.
Correo electrónico: iromero@ismm.edu.cu ]]>
 (2)
(2)
 (4)
(4)
 (5)
(5)
 (7)
(7)
 (8)
(8)
 (10)
(10)
 (13)
(13)
 (14)
(14)
 (15)
(15)
{kind=link}
{kind=link}
{kind=link}