COMUNICACIÓN BREVE
Sistema de visión térmica para desplazamiento en personas invidentes y con problemas de movilidad
Thermal vision system as a walking aid for blind and mobility-impaired persons
Mauricio Plaza Torres, William Aperador, Andres Cifuentes Bernal
Universidad Militar Nueva Granada. Bogotá, Colombia.
]]>
SUMARIO
El proyecto describió la patente de invención (resolución 78032) de un sistema térmico que tiene como objetivo informar al usuario no vidente sobre los obstáculos frente a él. El prototipo fue diseñado como un sistema asistencial para movilidad de invidentes con al usar de una silla de ruedas que puede ser escalado a personas con limitaciones de movilidad por daños en la columna vertebral. La cámara del periférico capta el ambiente y le indica hacia dónde debe dirigirse, evita los obstáculos a través de un panel térmico que entrega la información de contarnos en la mano del usuario. Los sistemas asistenciales para personas con limitaciones de visión y movilidad proveen al usuario un soporte para mejorar su calidad de vida, brinda un grado de independencia en ambientes controlados. El desarrollo de los dispositivos que abarquen una amplia gama de inhabilidades es un campo poco explorado. El proyecto diseñó un dispositivo que permite a una persona que posea problemas de visión, controlar una silla de ruedas e interactuar con un entorno controlado, en adición, el diseño solucionó los problemas de desplazamiento y autonomía de personas que también posean problemas de movilidad de sus miembros inferiores.
Palabras clave: visión artificial; control domótico; limitación de movilidad; autonomía; panel térmico.
ABSTRACT
The project describes the invention patent (Resolution 78032) of a thermal system informing a blind person of the obstacles lying in their way. The prototype was designed as an aid for the mobility of blind persons based on a wheel chair which may be scaled onto by people with impaired mobility due to an injured spine. The camera on the peripheral captures the environment and indicates the direction to be taken, avoiding the obstacles by means of a thermal panel conveying information to a hand-held device. Aids for vision and mobility impaired persons provide users with support to improve their quality of life, as well as some degree of independence in controlled environments. The development of devices comprising a wide range of disabilities has not been thoroughly explored. The project designed a device allowing a visually impaired person to control a wheel chair and interact with a controlled environment. Additionally, the design solved the mobility and autonomy problems of persons with limited lower limb mobility.
Key words: Artificial vision; domotic control; mobility impairment; autonomy; thermal panel.
INTRODUCCIÓN
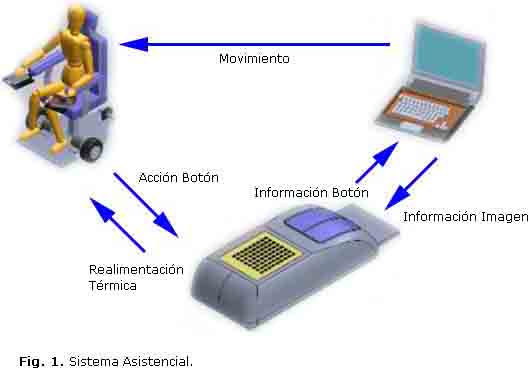
La invención es un dispositivo con captura de contorno de imágenes y un panel térmico que permite al usuario obtener información de su entorno, en adición, permite el control de movimiento de una silla de ruedas eléctrica y la interacción del usuario con un entorno domótico, usado para personas con limitaciones visuales y de movilidad.
En específico, la invención corresponde a una silla de ruedas eléctrica que comprende un dispositivo de captura de imágenes de contorno, un panel térmico, formado por un arreglo de elementos térmicos de montaje superficial que se calientan para formar patrones para proveer información táctil al usuario, un mouse que controla el movimiento de la silla de ruedas y donde se encuentra instalado el panel térmico y la cámara, una pluralidad de botones que le permiten al usuario interactuar con un ambiente domótico y un microcontrolador que controla el panel térmico y recibe información del dispositivo de captura de imágenes, mouse y los botones de control domótico (Fig. 1).
El objetivo principal de diseño es un sistema asistencial con imágenes térmicas para movilidad de invidentes al usar una silla de ruedas que puede ser escalado a personas con limitaciones de movilidad por daños en la columna vertebral. Los objetivos específicos fueron: Determinar las necesidades primarias de las personas con limitación de movimiento. Estudio de las posibles soluciones tecnológicas que permita un nivel de independencia en la movilidad. Uso de la tecnología térmica para invidentes y personas con limitaciones de movimiento. Uso de tecnología infrarroja para suplir los movimientos en personas con limitaciones de movilidad. Diseño de opciones de escalamiento para diferentes grados de incapacidad. Realización del prototipo. Solicitud de la patente.
SISTEMAS ASISTENCIALES ACTUALES
]]> Los dispositivos táctiles son interfaces de comunicación humano-computador que basan su funcionamiento en la producción de características que puedan ser percibidas por el sentido del tacto, como la forma, la textura y la temperatura, dicha producción de características se hace con el fin de permitir a un usuario extraer algún tipo de información del medio ambiente. En la actualidad existe dispositivos que se asemejan a pantallas táctiles que usan agujas o algún elemento mecánico para reproducir texto en braille, dispositivos más sofisticados toman imágenes del entorno y usan mecanismos similares a las pantallas braille para replicar un contorno sencillo obtenido a partir de la captura con una cámara, en ambos casos los dispositivos empleados son de naturaleza mecánica.1VG. Chouvardas y un grupo de investigadores realizaron una búsqueda bibliográfica acerca de las tecnologías empleadas en el desarrollo en ingeniería de dispositivos tipo pantallas táctiles, su artículo “Tactile displays: Overview and recent advances” de 2007 muestra una clasificación de los desarrollos táctiles basados en la clase de sensores estimulados en la piel, dichas categorías son:
Dispositivos basados en energía mecánica
Incluyen los dispositivos de presión reconfigurable (pantallas basadas en pines) que modifican la presión sobre una parte en la piel del usuario, mueve los pines arriba y abajo, se conocen también como pantallas Braille.2 Los actuadores pueden ser piezoeléctricos, válvulas neumáticas con control electrónico o actuadores de efecto de campo electromagnético.
Los dispositivos más comunes en esta categoría son:
Dispositivos SAW (Surface Acustic Waves)
El principio de funcionamiento es imitar los pequeños desplazamientos sufridos por los mecano receptores de la piel al tocar una superficie, para ello se emplean ondas acústicas que son controladas y viajan en un medio sólido, gracias a ello, los mecano receptores perciben de manera similar a como si se tocara un sólido especifico.
Dispositivos electrorhologicos y magnetorehologicos
Los primeros son una clase especial de dispositivos mecánicos que trabajan al modificar la viscosidad de un fluido dieléctrico, en condiciones normales un fluido dieléctrico se comporta como un fluido newtoniano, pero la polarización lo transforma en un semi-solido.6 La segunda clase de dispositivos es similar, con la diferencia de que su fuente de excitación es de origen magnético.
Dispositivos electro-táctiles
Son dispositivos que activan directos nervios en los tejidos subcutáneos, estos dispositivos producen sensaciones de presión o vibración sin necesidad de actuadores.
]]> Entre los desarrollos de dispositivos electro-táctiles encontramos el SmarTouch®,7 propuesto por Kajimoto y colaboradores, un sistema de realidad aumentada que convierte información visual en información táctil, compuesto por una matriz de electrodos de 4 × 4, una corriente en los electrodos inducia un campo eléctrico en el interior de la piel. Tang y colaboradores, desarrollaron una membrana táctil oral flexible que contenía una matriz de 7 × 7, en ella se podían representar patrones sencillos con estimulación eléctrica de baja potencia.
Dispositivos térmicos
Desarrollos más recientes incluyen dispositivos que incursionan en el campo de las sensaciones térmicas. En 2012 se publicó una aplicación de patente para un método y sistema para una pantalla táctil, se tiene como elemento constitutivo lo que ellos llaman los “pixeles braille” la pantalla es capaz de cambiar su topología, emplea elementos con efecto Peltier, gracias a ellos algunas zonas en la superficie de la pantalla pueden aumentar su relieve.
Las soluciones actuales tratan los problemas como sistemas desacoplados. Existe dispositivos que se asemejan a pantallas táctiles que usan agujas o algún elemento mecánico para reproducir texto en braille, dispositivos más sofisticados toman imágenes del entorno y usan mecanismos similares a las pantallas braille para replicar un contorno sencillo obtenido a partir de la captura con una cámara, en ambos casos los dispositivos empleados son de naturaleza mecánica.
En 2012 se publicó una aplicación de patente para un método y sistema para display táctil, se tuvo como elemento constitutivo lo que ellos llaman los “pixeles braille” la pantalla es capaz de cambiar su topología, empleó elementos con efecto Peltier, gracias a ellos algunas zonas en la superficie de la pantalla pueden aumentar su relieve, en este caso si bien se emplean efectos térmicos en el dispositivo, la solución es táctil a diferencia de la solución propuesta que es térmica.
Por otro lado la ejecución de movimiento de las sillas de ruedas eléctricas actuales incluyen el uso de joysticks en los sistemas más comerciales, hasta la implementación de sistemas sip’n puff, dispositivos mecánicos controlados por la lengua o la mandíbula, reconocimiento de intención por medio de visión artificial, entre otros para personas con limitaciones de movimiento por lesiones cervicales.
Una lesión de la médula espinal (SCI) se define como el daño o trauma en la médula espinal que a su vez resulta en una pérdida o deterioro de la función que resulta en la movilidad o sensación reducida.8
Causas comunes típicos de daño a la médula espinal, son el trauma (accidente de coche/moto, arma de fuego, caídas, lesiones deportivas, etc.), o enfermedad (mielitis transversa, la poliomielitis, la espina bífida, la ataxia de Friedreich, tumor de la médula espinal, la estenosis espinal, etc.). El daño resultante de la médula espinal se conoce como una lesión, y la paralización se conoce como tetraplejia o cuadriplejia/tetraplejia si la lesión es en el (cuello) región cervical, o como paraplejia si la lesión está en la columna torácica, lumbar o sacra. De igual manera existe un alto índice de personas con limitaciones de visión que impiden el normal desempeño en la sociedad y en las actividades de la vida diaria.2
]]> DESCRIPCIÓN DE LA INVENCIÓN
La invención es un dispositivo con captura de contorno de imágenes y salida térmica que permite al usuario obtener información de su entorno, en adición permite el control de movimiento de una silla de ruedas eléctrica y la interacción del usuario con un entorno domótico, usado para personas con limitaciones visuales y de movilidad.
Este dispositivo cuenta con un tres botones, un mouse y un panel térmico. El mouse permite al usuario mover la silla en las direcciones adelante-izquierda-derecha cuando el primero de los botones se encuentra presionado, si es el tercer botón el que se encuentra activo el dispositivo deja al usuario interactuar con un ambiente domótico mediante el movimiento del mouse.5
Para tomar las decisiones de movimiento, el usuario cuenta con acceso a un panel térmico, el dispositivo toma una foto del entorno cuando el botón medio es presionado, y luego de un procesamiento de la imagen, la información de la misma se presenta en forma de figuras térmicas en un panel que cuenta con 9 × 9 unidades térmicas de resolución, la información de la imagen enciende o apaga dichas unidades para crear patrones térmicos que pueden ser sentidos por el usuario en la palma de su mano, con esa información el usuario puede tomar decisiones sobre la silla de ruedas o el ambiente domótico.
CARACTERÍSTICAS TÉCNICAS DE LA INVENCIÓN
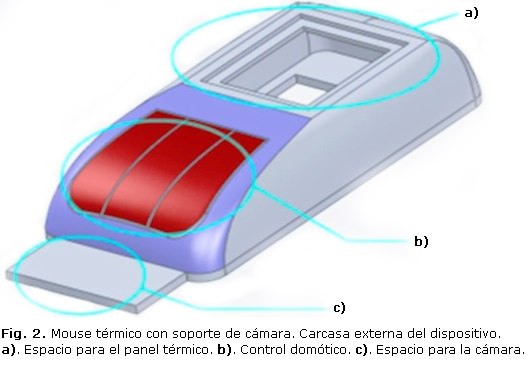
El tamaño del dispositivo es de 80 mm × 200 mm × 40 mm aproximado, se diseñó de forma que el tamaño de una mano humana promedio pudiera descansar a gusto en él (Fig. 2).
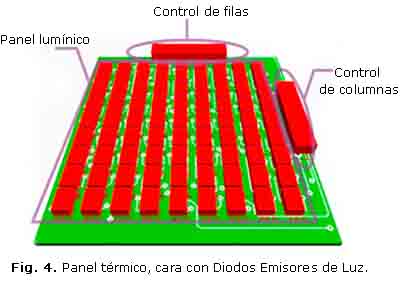
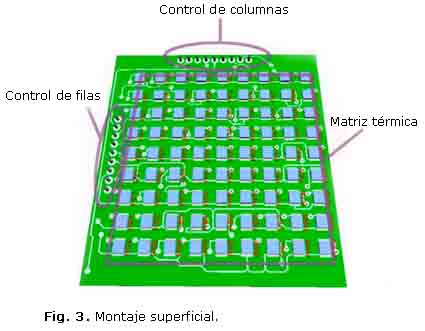
La cara mostrada en la figura 3, contiene elementos de montaje superficial. Los elementos se calientan para formar patrones térmicos con el fin de proveer información táctil al usuario, la región central contiene la matriz de elementos térmicos, permite el control de tal forma que “termopixel” se activa.9
El panel luminoso tiene la función de mostrar la imagen que proyecta en el panel térmico. Es de gran utilidad en personas con algún grado de visión. Este panel pude ser proyectado como complemento o como el sistema base para este tipo de limitaciones (Fig. 4).
Si el botón de captura es presionado, el controlador envía una señal al computador para obturar la cámara, el computador se encarga del tratamiento de la imagen y de enviar los datos necesarios por el microcontrolador para poder encender, correcto, el panel térmico y luminoso.3
Si el botón de interacción domótica es presionado, el microcontrolador envía el requerimiento del usuario, capturado desde el mouse, de forma que cada una de las direcciones del mouse corresponden a acciones diferentes en la interacción domótica.1
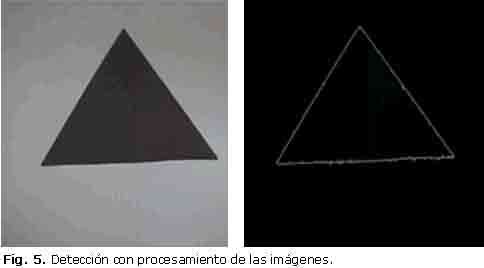
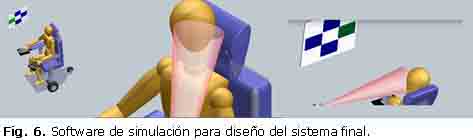
Para tomar las decisiones de movimiento, el usuario cuenta con acceso a un panel térmico, el dispositivo toma una foto del entorno cuando el botón medio es presionado, y luego de un procesamiento de la imagen, la información de la misma se presenta en forma de figuras térmicas en un panel que cuenta con 9 × 9 unidades térmicas de resolución. La información de la imagen enciende o apaga dichas unidades para crear patrones térmicos que pueden ser sentidos por el usuario en la palma de su mano, con esa información el usuario puede tomar decisiones de acción sobre la silla de ruedas o el ambiente domótico (Fig. 5 y 6).10
]]>DIFERENCIAS TÉCNICAS ENTRE LA INVENCIÓN Y LAS SOLUCIONES ALTERNATIVAS
La principal diferencia es el campo físico en el cual se presenta la solución. Los sistemas térmicos no se han desarrollado para estas aplicaciones específicas. Los paneles braille que existen en la actualidad usan componentes mecánicos, incluso en los desarrollos que usan propiedades térmicas de los materiales, la realimentación al usuario es táctil, en adición, la presente propuesta de patente incluye algoritmos novedosos que permiten un uso más amplio y versátil de los diseños mecánicos y electrónicos descritos en esta innovación, es por ende, una innovación amplia e integradora que no solo se limita a los diseños individuales de la estructura física sino al método de implementación y los algoritmos de control e identificación en el desarrollo.11
El prototipo final mejora la calidad de vida de personas con limitaciones de movimiento y visión, permitiéndoles un mayor grado de libertad. El prototipo tiene la posibilidad de controlar una silla de ruedas y algunos dispositivos inalámbricos conectados mediante el uso de una palanca en el caso de invidentes o el movimiento de la cabeza para personas cuadripléjicas. Se comprobó que la solución propuesta cumple con los objetivos de desplazamiento en condiciones de poca movilidad y de invidencia. El sistema es fácil de usar, bajo costo y seguro gracias a los mecanismos de control diseñados en software.
Estas características determinan que el Sistema sea robusto y fácil de reproducir. Las personas que usan el sistema tienen la posibilidad de desplazarse en un ambiente controlado sin dificultad. El sistema se ajusta a las características de discapacidad del usuario y puede ser escalable para permitir el control del sistema con diferentes zonas que aun tenga movilidad.
CONSIDERACIONES FINALES
La tecnología de control electrónico para la movilidad y la domótica (sistemas de automatización del hogar) puede ser una gran ayuda para las personas con lesiones de la médula espinal y con limitaciones de visión para el uso de dispositivos en la actividad de la vida cotidiana. El diseño de diferentes tipos de tecnologías para proporcionar al paciente ayuda, es capaz de aumentar su calidad de vida, permite movilidad e independencia.
Los fabricantes de equipos argumentan que el diseño de aplicaciones para los usuarios con discapacidad no es rentable. La mayoría de estos sistemas están diseñados para usuarios que no son discapacitados, por lo tanto, los sistemas que se ocupan de los usuarios con discapacidad necesitan interfaces especiales con el fin de ser accesible y de bajo costo.6
Este artículo presenta un método para desarrollar un prototipo eléctrico y mecánico para personas tetrapléjicos y personas con limitaciones severas de visión, siempre que puedan realizar un grado específico de movilidad que le permita un control limitado de algún dispositivo. Con el uso de una técnica de infrarrojos, sistemas térmicos, la tecnología de visión por computador y diseño mecánico, los usuarios pueden realizar algunas actividades para mejorar su calidad de vida y dar algún grado de independencia.12,13
]]> La mayoría de los dispositivos enfocados a personas con limitaciones visuales se centran en las sensaciones táctiles debidas a la textura o forma de los elementos que entran en contacto con el paciente, en especial con los dedos y la palma de la mano, como se describió anterior, las sensaciones térmicas son aun objeto de estudio, y la implementación de sistemas de realimentación térmica para personas invidentes es muy limitado.4En adición la invención incluye el desarrollo de los algoritmos de comunicación y control necesarios para el funcionamiento de una silla de ruedas eléctrica estándar y un sistema de interacción domótica, convirtiéndose en una aplicación más general y amplia. Es evidente que soluciones desarrolladas para mejorar la calidad de vida de los pacientes con limitaciones físicas en la actualidad, desacoplan las dificultades de motricidad y las de visión, lo mismo implica que los dispositivos y métodos desarrollados se encarguen de cada uno como problemas aislados, en la realidad esto no es necesario, en cierto, con frecuencia las personas que sobreviven accidentes graves (por ejemplo en una explosión) ven implicados tanto su sistema locomotor como su sentido de la vista (al menos parcial). La invención proporciona multi-mecanismos de acción para personas en una amplia gama de limitaciones motrices y diferentes grados de disminución de la capacidad visual.
REFERENCIAS BIBLIOGRÁFICAS
1. Biocca A. A survey of position trackers. In: Presence: Teleoperators and Virtual Environments. Spring. 1999;1(2):173-200.
2. Zoss AB, Kazerooni H, Chu A. Biomechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX), IEEE/ASME Trans. Mechatronics. 2006;11(2):128-386.
3. Chang A, Modhrain O, Jacob R, Gunther E, Ishii H. Comtouch: design of a vibrotactile communication device. In: Proceedings of the Conference on Designing Interactive Systems. New York: ACM Digital Library; 2002. p. 312-20.
]]>4. Adam C, Esser MD, James G, Koshy HW, Randle MD. Ergonomics in Office-Based Surgery: A Survey-Guided Observational Study. American Society for Dermatologic Surgery, Inc; November 2007.
5. van den Bogert AJ. Exotendons for assistance of human locomotion. Biomed. Eng. 2002;2:17.
6. Dollar AM, Herr H. Lower Extremity Exoskeletons and Active Orthoses: Challenges and State-of-the-Art. IEEE Trans. Rob. 2008;24(1):185-94.
7. Klein D. Electrorheological tactel elements. Mechatronics. 2005;15(7):883-97.
8. Chouvardas VG, Miliou AN, Hatalis MK. Tactile displays: Overview and recent advances. Displays 29, Elsevier; 2008. p. 185-94.
]]>9. Wong LJ, Xiong T. Method and System for Tactile Display, Patent Application. Publication US; 2012.
10. Gavrilov LR, Tsirulnikov EM, Davies I. Application of focused ultrasound for the stimulation of neural structures. Ultrasound in Medicine & Biology. 1996;22:179-92.
11. Ikei Y, Wakamatsu K, Fukuda S. Vibratory tactile display of image-based textures. IEEE Computer Graphics and Applications. 1997;17:53-61.
12. Poupyrev I, Maruyama S, Rekimoto J. Ambient touch: designing tactile interfaces for handheld devices. In: Proceedings of the 15th Annual ACM Symposium on User Interface Software and Technology. New York: ACM Digital Library. 2002. p. 51-60.
13. Kajimoto H, Kawakami N, Tachi S, Inami M. Smarttouch: electric skin to touch the untouchable, IEEE Computer Graphics and Applications. 2004;24(1):36-42.
]]>
Recibido: 20 de octubre de 2015.
Aprobado: 18 de noviembre de 2015.
Mauricio Plaza Torres. Universidad Militar Nueva Granada. Bogotá, Colombia.
Correo electrónico: mauricio.plaza@unimilitar.edu.co