ARTÍCULO ORIGINAL
Sistemas biomecánicos para patologías musculares y cargas pesadas
Biomechanical systems for muscle pathologies and heavy loads
Mauricio Plaza Torres, William Aperador, Andrés Cifuentes
Universidad Militar Nueva Granada. Bogotá, Colombia.
]]>
RESUMEN
Introducción: la necesidad de movimiento de elementos pesados en determinadas labores profesionales ha desarrollado el avance de los dispositivos de transporte con el fin de evitar lesiones y molestias temporales que puede variar desde unas pocas horas, al resentimiento al tejido óseo y muscular de forma permanente. Este caso es aún más común en el personal militar, ya que en las actividades de campo normalmente requiere la movilización de equipos a través de largas distancias, que a menudo superan los límites de resistencia de los soldados.
Objetivos: plantear y desarrollar un diseño de un sistema de soporte de miembro inferior pasivo para militares, actividades repetitivas y personas con problemas de tensión muscular, con la intención de resolver algunos problemas técnicos actuales.
Métodos: se utilizó nuevas tecnologías biomecánicas como la medición de la intención investigación para diseñar un sistema de soporte. El proceso de diseño se abordó mediante la búsqueda de la optimización y la mejora de las características físicas y funcionales del prototipo, para asegurar que el prototipo proporciona la protección y el apoyo esperado.
Resultados: el sistema de detección se utilizó para determinar la intención del usuario y lograr un diseño funcional adecuado del dispositivo. Los exoesqueletos diseñados son portátiles y autónomos en su parte mecánica, mejorando las presentes las limitaciones asociadas con los dispositivos portátiles.
Conclusiones: el diseño final es un exoesqueleto que permite a una persona sana y las personas con problemas de movilidad en el sistema músculo-esquelético, pueden utilizar el dispositivo para un mejor consumo de energía y para hacer movimientos más eficientes y de menor consumo. El diseño incluyó la información psicológica, la biometría, la especificación de la biomecánica y diseño de bajo costo.
Palabras clave: software de intención; problemas de movilidad; transporte de carga pesada.
ABSTRACT
]]> Introduction: The requirement for movement of heavy loads in certain professional works has brought about the advancement in transportation devices with the objective of preventing temporary pains and lesions that may last a few hours or permanent injure to bone and muscle tissues. This situation is more common in the military personnel since field activities normally require the movement of equipment to long distances and this often exceeds the soldiers´ strength limits.Keywords: intention software; mobility problems; heavy load transportation.
INTRODUCCIÓN
]]> Los sistemas de exoesqueletos están diseñado en la actualidad como productos comerciales. Si bien se han superado retos relacionados con exoesqueletos, hoy en día hay problemas con el desarrollo de estos dispositivos que no han sido resueltos.Hay dos consideraciones de diseño importantes en la investigación que deben ser abordadas, la portabilidad y la interfaz humana. El diseño de la presente investigación se define como un dispositivo de órtesis pasiva de naturaleza antropomórfica y estrechamente ligado al cuerpo humano y que trabaja en concordancia con los movimientos del operador. Eso significa que la investigación se centrará en una órtesis para las extremidades inferiores en paralelo con las piernas humanas que operan de la misma manera con el movimiento del usuario como resultado de un estudio previo de la intención. La órtesis pasiva está limitada en un dispositivo que proporciona aumento de potencia en las articulaciones de las extremidades inferiores para ayudar al usuario final en su desplazamiento, pero no reemplaza el movimiento completo.
El diseño incluye además, la prevención de daños en la espalda y columna vertebral, debido al transporte de cargas pesadas en actividades militares o actividades que incluyen el transporte de elementos pesados.1
Con el desarrollo tecnológico se tienen a disposición herramientas especializadas de diseño para facilitar la movilidad de los pacientes en recuperación. Un buen diseño incluye un estudio previo profundo con mediciones fisiológicas y técnicas de diseño moderno para la construcción y validación de un sistema ergonómico novedoso para personas con problemas musculoesqueléticos, para evitar lesiones en la espalda y la columna vertebral, sin degradar el rendimiento en el trabajo o ejercicio militar, medido por el aumento de la comodidad y la fuerza del sistema músculo-esquelético de los soldados y trabajadores; usándose métodos que promueven mejoras en aspectos críticos del ejercicio de movilización de cargas pesadas,2 con una mejor distribución de la carga en diferentes partes del cuerpo y un soporte externo. Esta tecnología se utiliza a menudo para personas con daño en el sistema musculoesqueléticos.3
El objetivo de esta investigación es el uso de nuevas tecnologías para aumentar las capacidades físicas de los seres humanos sin discapacidad y el diseño del dispositivo para ayudar a las personas con discapacidades físicas basados en la medición de intensión y el uso de nueva tecnologías biomecánicas.
MÉTODOS
El uso de sistemas de medición de la intención (Fig. 1) permite determinar las condiciones fisiológicas mejorándose los resultados del diseño con respecto a los modelos utilizados en la actualidad (maletas, mochilas, cinturones, etc.) reduciendo la tasas de lesiones y mejorándose la distribución de carga, de acuerdo con la naturaleza de la misma, con el tipo de soporte en el que se trata de movilizar y adaptándose al fenotipo de la población colombiana.
El proceso de diseño se abordó mediante la búsqueda de la optimización y la mejora de las características físicas y funcionales del prototipo, con pruebas no invasivas en los usuarios finales potenciales y teniéndose en cuenta las opiniones de los expertos, para asegurar que el prototipo proporciona la protección y el apoyo esperado.
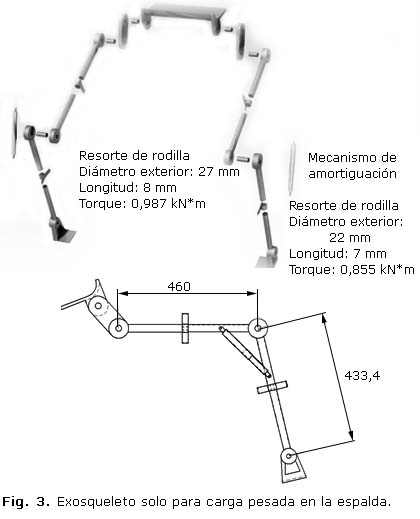
]]> Los elementos de diseño (muelles y amortiguadores) absorbieron y disiparon la energía del movimiento del usuario y se controló por anclajes mecánicos. El sistema permitió liberar la energía almacenada en forma controlada en los muelles durante las diversas fases de la marcha. El sistema incluyó componentes activos para bloquear y desbloquear las articulaciones de la órtesis, es un híbrido de refuerzo ortésico activo y control mecánico funcional. Por último, los exoesqueletos diseñados son portátiles y autónomos en su parte mecánica, teniéndose presentes las limitaciones asociadas con los dispositivos portátiles, que en su mayoría necesitan un suministro de energía que los hace inoperantes en corto tiempo de uso.El diseño final (Fig. 2) consistió en dos brazos con muelles que funcionan en paralelo con las piernas y fue pensado para aumentar la fuerza y dar autonomía en la marcha. Cada resorte de brazos fue diseñado durante el contacto del pie para transferir de forma eficiente, el peso de la carga al suelo y reducir las fuerzas transmitidas por la pierna de apoyo.
La medida de la eficacia de la órtesis se determinó como el costo metabólico necesario para caminar. El método utilizado fue la medición del consumo de oxígeno debido al movimiento y la producción de dióxido de carbono de un sujeto con el dispositivo y sin el dispositivo, durante el transporte de carga pesada.
RESULTADOS
Los resultados mostraron aumento de la energía metabólica de transporte. El diseño del sistema de carga aumentó el gasto metabólico pero permitía que el usuario realizara movimientos específicos en el caso de las personas con enfermedad muscular y también permitió cargar más peso en el caso de trabajo de transporte de cargas pesadas.4
El sistema de detección basado electroencefalograma (EEG) y electromiografía se utilizó como sistemas de control para determinar la intención del usuario y lograr un diseño funcional adecuado del dispositivo y elementos potenciómetros para la medición de ángulo de la articulación, sensores de fuerza de reacción, un giroscopio y acelerómetro para determinar la posición.
La capacidad del dispositivo para aumentar el rendimiento del usuario para llevar grandes cargas fue demostrada en las pruebas con usuarios. La eficacia de los componentes de las extremidades inferiores del exoesqueleto5 aumentó en 20 %. Se determinó que la energía utilizada para caminar es alta, pero la cantidad de carga es también superior, sin daños o afectación en las articulaciones.
Para lograr esto, el proyecto tenía como objetivo realizar mediciones de las variables antes mencionadas a fin de validar la correlación entre la carga y el aumento del esfuerzo cardiovascular, esta información fue vital para centrar los esfuerzos en los sistemas que reducen estos esfuerzos durante la marcha, por lo que se tiene beneficios adicionales a los dispositivos convencionales. La investigación ha demostrado que hay un impacto negativo en el sistema músculo esquelético debido a una carga excesiva, el diseño disminuye el daño muscular en el cuello y la espalda y reduce el estrés cardiovascular; como resultado el mecanismo proporcionaría mejoras en diferentes frentes del problema de los soldados por síndrome de sobrecarga o trabajadores que trasladan cargas pesadas.
]]> La función adicional de este dispositivo era aumentar la capacidad de transporte de carga de un usuario sin discapacidad como un soldado. La investigación identificó algunos problemas técnicos y comenzó a abordar muchos de los aspectos fundamentales de la aplicación de tales dispositivos. Una de las conclusiones fue que el dispositivo admite sólo una parte del peso mediante resortes y enclavamiento en lugar de la función que cumple una fuente de alimentación portátil, por medios de detección y control de algunos parámetros de posición, utilizándose una interfaz física con el cuerpo humano, de ayuda a la biomecánica de la locomoción.Por último, los exoesqueletos diseñados son portátiles y autónomos en su parte mecánica, teniéndose presentes las limitaciones asociadas con los dispositivos portátiles. La comprensión de la biomecánica de la marcha humana fue el primer paso en el diseño de la órtesis de apoyo diseñada.
La pierna humana es una estructura de 7 DOF (Degree Of Freedom), con tres grados de libertad de rotación de la cadera, una en la rodilla, y tres en el tobillo. El movimiento de la articulación en el plano sagital se refiere a la flexión y extensión, el movimiento de la cadera en el plano coronal se refiere como abducción y aducción, el movimiento del tobillo en el plano coronal se refiere como la eversión (lejos del centro del cuerpo) y la inversión. Los grados de libertad restantes de la cadera y el tobillo se refieren a la rotación. Estos términos se utilizan para describir la disposición cinemática de los diseños ortésicos.
Las medidas biomecánicas fueron tomadas de una persona con medida antropomórfica de 82 kg y de 1 m de longitud de las piernas, caminándose sobre una plataforma y un registro del ángulo de la articulación, trayectoria, potencia en todas las uniones y la flexión / extensión del tobillo durante la marcha.6
Los datos de marcha pueden diferir entre sujetos y condición de campo, pero la naturaleza cualitativa de los datos sigue siendo similar. Estas medidas son muy útiles para el diseño de la órtesis activa y los requisitos de potencia de cada articulación.
Utilizándose los resultados de la investigación, se diseñó un sistema de frenado para evitar lesiones o sobre extensión. La optimización de la energía se consideró un elemento importante en el proyecto, el análisis del mecanismo de transferencia de energía tomó en cuenta las ventajas de la energía entregada por el par generado por el movimiento del usuario, usándose el peso de la persona como sistema de generación de energía. Como resultado, el sistema puede transferir el peso al apoyo mecánico de la pierna, reduciéndose el esfuerzo del usuario final.
El protocolo para el diseño del sistema para las personas con movilidad limitada o para el transporte de cargas pesadas comenzó con diez voluntarios de las fuerzas armadas nacionales (entre las edades de 23 a 25 años, con un peso de 80 a 87 kg) con un sistema de laboratorio de la marcha que incluye sistemas de EEG, cámaras, electromiografía, electrocardiografía, frecuencia cardiaca y oximetría, para vigilar los movimientos de cadera y articulaciones de la rodilla y una plataforma de fuerza para medir el esfuerzo excesivo presión sobre el punto de apoyo en la marcha.
La prueba simuló una trayectoria de 10 kilómetros de longitud en una topología plana. Los cambios en la topología fueron hechos por inclinaciones estáticas. Los pesos adicionales fueron colocados en incrementos de 5 kilos, a partir de 20 kilos hasta 30 kilos. Los pesos adicionales se estimaron de 2 kilos.
Se utilizaron medidas adicionales, tales como la frecuencia cardíaca para determinar el nivel de energía con y sin el sistema diseñado. La base para los niveles de ritmo cardíaco fue la frecuencia de reposo y la toma de muestras durante el experimento fue una muestra por cada dos segundos.
La frecuencia cardiaca máxima se calculó con la siguiente ecuación:
]]>El resultado sugiere que las personas más ligeras están en desventaja en las tareas de transporte de cargas pesadas así como personas de baja estatura, que puede ser debido a la necesidad de hacer un paso largo anormal, para ajustar a la velocidad normal de movimiento.
Algunos estudios se han centrado sus esfuerzos en el análisis de las acciones preventivas o correctivas por estimulación muscular directa o masaje, anterior a la actividad física, que predisponen el músculo al trabajo físico. Algunos estudios que utilizan la vibración y estimulación eléctrica han llegado a la conclusión de que los efectos de estas terapias en el músculo es sólo una reducción del dolor debido al agotamiento.
El resultado llega a la conclusión de que la ubicación de la carga en la parte inferior del cuerpo puede ser mejor para terreno uniforme, mientras que la carga en la parte media inferior del cuerpo se puede usar para el campo no homogéneo. Otro resultado de la investigación es que la posición de la carga y la velocidad de la marcha afectan el consumo de energía. Por esta razón es importante reducir la carga en las extremidades inferiores. Este resultado es importante para el diseño del exoesqueleto.
Otro resultado importante a tener en cuenta es la eficiencia de la transferencia entre la energía cinética y la energía potencial que es máxima alrededor de 70 m / min en el modo de marcha y disminuye para diferentes velocidades, carga máxima pesada o problemas musculares.
Un Sistema Moticon electrónico de almohadillas plantares se utilizó para medir las fuerzas de reacción en el apoyo. Los datos de medición de las almohadillas electrónicas pueden determinar parámetros como la distribución de la presión del pie representado en escala térmica y la trayectoria del centro de presión, durante fase de apoyo de la marcha. Otros parámetros importantes son la fuerza de reacción del pie de apoyo y la aceleración vector de cada pie durante el movimiento.
La fuerza de reacción del suelo fue medida con las almohadillas con diferentes cargas (0 - 40 kg). Los resultados concluyen con un centro de masa estable, que se consigue con cargas pesadas, lográndose mejor estabilidad estática. Mayores fuerzas de impacto, como las experimentadas en el transporte de cargas pesadas, generar un mayor riesgo de lesiones, generando estrés en las articulaciones y posible fracturas.
DISEÑO DEL DISPOSITIVO
Los avances tecnológicos han desarrollado herramientas especializadas diseñadas para facilitar la movilidad o recuperación del paciente. Una de las herramientas buscan mejorar la calidad de vida de las personas son exoesqueletos. Un exoesqueleto es una estructura que se utiliza para ayudar a la circulación y aumentar las capacidades del cuerpo humano.7
El exoesqueleto debe permitir que una persona sana use el dispositivo sin sentir restricciones en la movilidad concentrando sus esfuerzos no sólo en la parte funcional de la estructura, sino también en la parte del consumo de energía, siempre para hacer movimientos más eficientes y con un menor consumo. Para esto, el diseño incluyó la información psicológica y la biomecánica del usuario que no es una tarea fácil debido a que un sistema debe adecuarse a los diferentes usuarios y a las diversas tareas que deben realizar. Varios problemas surgen con los exoesqueletos de tipo tradicional:
Además de los sistemas mencionados, se ha encontrado que los sistemas desarrollados no se centran en el ser humano, quien en última instancia va a validar el diseño. El estado del arte sobre estos temas no da a conocer un control de los sistemas y análisis de rendimiento a través de técnicas sofisticadas. La investigación actual se centra en la medición de intención, que determina las acciones a seguir por el dispositivo para ayudar al usuario. Estas mediciones se realizaron por acelerómetros y dispositivos de electromiografía (Fig. 3).
El sistema de control utiliza codificadores y acelerómetros lineales para determinar el ángulo, velocidad y aceleración de cada una de las articulaciones, un interruptor de pie para determinar contacto con el suelo y distribución de la fuerza de los pies. El dispositivo es de aproximadamente 7 kgrs de peso.
El sistema de accionamiento está diseñados para trabajar en varias direcciones:
El sistema tiene articulaciones no accionados, la inversión del tobillo / eversión y la rotación de las articulaciones de la cadera son mecanismo de resorte, y la articulación de rotación del tobillo gira sin restricciones.
Los requisitos de la cinemática de accionamiento del exoesqueleto fueron diseñados por los datos del análisis clínico de marcha. El diseño cinemático de una articulación de cadera que se coloca entre las dos partes del sistema no interfiere con articulaciones de la cadera del usuario. De la misma manera, la articulación de la inversión / eversión en el tobillo no está en el mismo lugar de la articulación humana, es un lugar en el lado lateral del pie. Las otras articulaciones del sistema coinciden con las articulaciones del usuario.
Los esquemas de control utiliza la información sensorial del sistema. El sistemas no puede equilibrarse por sí mismo, el usuario debe proporcionar una fuerza de avance que pueda dirigir el sistema durante la marcha.
El diseño utiliza un sistema pasivo que no utiliza actuadores para añadir potencia a las articulaciones. El diseño libera la energía almacenada en los resortes durante las fases de la marcha. Los elementos pasivos en el sistema (muelles y amortiguadores) fueron elegidos en base a un análisis de la cinética y la cinemática de la marcha humana.
La rodilla se compone de un amortiguador de aire que compresa el movimiento en la dirección de flexión / extensión, este elemento disipar la energía en forma apropiada para ciclo de la marcha.
El tobillo tiene resortes para flexión dorsal y plantar. Estos muelles se colocan con el fin de adaptar el tobillo en diferentes terrenos durante el movimiento, el almacenamiento y la liberación de la cantidad adecuada de energía.
El resorte reduce el impacto y ayuda a levantar el talón en la flexión plantar. Otra es el resorte, agregado con el fin de permitir que los movimientos plano sagital.
]]> Los datos experimentales demuestran que el dispositivo que soporta cargas pesadas transfiere en promedio 30 % de la carga de peso al soporte sobre el suelo durante la fase de marcha.El exoesqueleto debe permitir que una persona sana use el dispositivo sin sentir las restricciones en la marcha para enfocar sus esfuerzos no sólo en la parte funcional de la estructura, sino también en la parte del consumo de energía, siempre en busca de hacer movimientos más eficiente y a más bajo consumo.
Para hacer movimientos eficientes y de potencia inferior, debe ser incluido en la información psicológica y biomecánica del usuario del sistema, que no es una tarea fácil debido a que el sistema debe dar cabida a los usuarios y las diversas tareas que es necesario realizar.
El diseño final es un exoesqueleto que funciona en paralelo con los elementos humanos que intervienen en la marcha, cuya fuerza es controlable, un mecanismo de amortiguación variable en la rodilla y un mecanismo de resorte pasivo en el tobillo para permitir el uso eficiente de la energía, la posición de la articulación de la rodilla se obtienen midiéndose el ángulo de la misma y su fuerza de reacción con el suelo.
Para el proyecto era necesario el desarrollado de diseños detallados y validación rigurosa de las partes principales del sistema propuesto, estos incluyen: abrazaderas, resortes calculados para el peso y las articulaciones de diferentes grados de movilidad. Los muelles fueron diseñados para funcionar a través de la fuerza de reacción del suelo causada por el peso corporal. Los sistemas de muelles se encuentran en las partes delantera y trasera del soporte inferior con una distribución y ubicación para garantizar la mejor eficiencia energética en el sistema.
El prototipo tiene una matriz de sensores con el fin de determinar la posición de la articulación de la rodilla, que se utiliza para determinar la eficacia del sistema.
El diseño final es un exoesqueleto que permite a una persona sana y las personas con problemas de movilidad en el sistema músculo-esquelético, utilizan el dispositivo para un mejor consumo de energía y para hacer movimientos más eficientes y de menor consumo. El diseño se incluyó la información psicológica, la biometría, la especificación de la biomecánica y diseño de bajo costo.
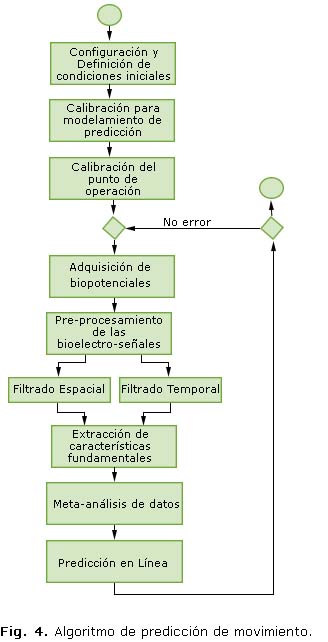
Un resultado de la investigación es el uso de la tecnología de la electromiografía para la predicción del movimiento voluntario humano antes de que ocurra. El movimiento voluntario humano en algunas investigaciones se asocia con cambios en el EEG que se pueden observar ya en 1.5s.
Sobre la base de datos de muestra de electromiografía de fase activa durante la preparación del movimiento, se diseñó el modelo de predicción. El modelo se utilizó para diseñar la tensión del muelle y la dimensión del sistema de apoyo. El punto de trabajo óptimo proporciona un equilibrio en trabajadores con cargas pesadas o personas con problemas de movilidad (Fig. 4).
]]>DISCUSIÓN
Después del análisis de los datos de la marcha se encontró que la energía utilizada por los movimientos de la cadera está cercana a cero y en las articulaciones de la rodilla se disipa la energía. Durante el estado de equilibrio a nivel del suelo, la potencia mecánica neta es cercana a cero, porque hay poco trabajo para alcanzar la resistencia al movimiento y el sistema descansa sobre un punto de apoyo rígido.
Teniéndose en cuenta los resultados de la cinemática de tobillo, rodilla y cadera durante el ciclo de la marcha, las órtesis incorporan una adición de potencia estática en la cadera y un amortiguador para disipar energía en la rodilla. El almacenamiento y la liberación de energía en el tobillo se logran con el uso de estructuras pasivas y manuales.8
El documento termina con la descripción de los resultados de una evaluación informal del prototipo de dispositivo mecánico y el diseño de un exoesqueleto accionado para el aumento de rendimiento.9,10
CONSIDERACIONES FINALES
El artículo describe el desarrollo del diseño de un sistema de apoyo para permitir que las personas sanas realicen tareas difíciles, aumentándose la fuerza o la habilidad muscular. De otra aparte, se puede usar para personas con problemas de tensión muscular. Los parámetros tomados en cuenta para el análisis de la marcha son los siguientes:
• Longitud del paso.
• Cadencia.
]]> • Velocidad.• Ángulo de Articulaciones.
En comparación con muchos otros exoesqueletos, la intención del proyecto es aumentar las capacidades de resistencia del usuario mediante el uso de elementos mecánicos que utilizan el movimiento de usuario como fuente de energía.
Los resultados se lograron con la amplificación de la fuerza en la pierna y el almacenamiento de energía en el prototipo. La contribución más importante del proyecto de investigación fue identificar y resolver muchos de los aspectos más desafiantes del diseño del exoesqueleto con algunas restricciones tales como fuente de alimentación y la interfaz hombre / máquina, diseño de bajo costo.
Otro objetivo en el diseño de prototipo es aumentar el rendimiento de los soldados durante la tarea de transporte de carga, lo que reduce la fatiga del soldado.
Reconocimientos
Resultados obtenidos por el Proyecto de investigación UMNG IMP ING 2135.
Declaración de Conflicto de Intereses
]]> Los autores declaran que no hay conflicto de intereses.
REFERENCIAS BIBLIOGRÁFICAS
1. Liu BS. Backpack load positioning and walking surface slope effects on physiological responses in infantry soldiers. International Journal of Industries Ergonomics; 2007. p. 2-6.
2. Blacker SD, Fallowfield JL, Bilzon JL, Willems ME. Neuromuscular function following prolonged load carriage on level and downhill gradients. Aviat. Space Environ. 2010;81:745-53.
3. Jones G. Human Load Carriage: The Ergonomic Assessment and Development of Military Load Carriage Systems. PhD Thesis. Loughborough, University, UK; 2005.
4. Millet GY, Lepers R. Alterations of neuromuscular function after prolonged running, cycling and skiing exercises. Sports Med. 2004;64:105-16.
5. Xie Y, Bai W, Zhang Y. Research on the lower limbs rehabilitative robot. China Medical Device Information. 2010;16(2):5-8.
6. Ding Min LI, Jian-min WU, Shen Hai-tao. Research advances and clinical application of lower limb gait rehabilitation robots. Journal of Clinical Rehabilitative Tissue Engineering Research. 2010;14(35):6604-7.
7. Homby TG, Zemon DH. Campbell d. Robotic - assisted, body -weight- supported treadmill training in individuals following motor incomplete spinal cord injury. Physical Therapy. 2005;85(1):52-66.
8. Agrawal SK, Banala SK, Fattah A. Assessment of motion of a swing leg and gait rehabilitation with a gravity balancing exoskeleton. Transactions on Neural Systems and Rehabilitation Engineering, IEEE. 2007;15(3):410-20.
9. Yang D, Liu L, Xu K. Kinematics analysis of humanoid robot. Chinese journal of mechanical engineering. 2003;39(9):70-4.
10. Gan Z, Xiao N. Research and Implementation of 3D Simulation System for Biped Humanoid Robot. Journal of System Simulation. 2007;19(11):2444-8.
Recibido: 17 de agosto de 2016.
Aprobado: 20 de septiembre de 2016.
Mauricio Plaza Torres. Universidad Militar Nueva Granada. Bogotá, Colombia. ]]>