
Modelo matemático en Simulink de un motor de reluctancia conmutada con configuración 4/2
Mathematical model of a 4/2 switched reluctance motor in simulink
Ing. Luis Manuel Alvarez Tapia, MSc. Javier Quintana Santos, Dr. C. Javier Muñoz Álvares, Dr.C. Mario Morera Hernández
Centro de Investigaciones y Pruebas Electroenergéticas, CIPEL, Instituto Superior Politécnico José Antonio Echeverría, Cujae, La Habana, Cuba.
]]>
RESUMEN
En el presente trabajo se creó un modelo matemático para el motor de reluctancia conmutada WEKA SR-30102 bifásico irregular de fabricación alemana utilizando la herramienta de diseño Simulink. Para la correcta descripción de los fenómenos eléctricos y mecánicos que ocurren dentro de la máquina se utilizaron las ecuaciones eléctricas y mecánicas, tomando en consideración las características no lineales del motor y la influencia a altas velocidades de fenómenos mecánicos. Dicho modelo se utilizó para la implementación de dos estrategias de control, dígase, control a lazo cerrado de la velocidad mediante modulación de ancho de pulso y con control por histéresis. Estas estrategias fueron aplicadas a un convertidor electrónico de potencia con una configuración 2q, que posteriormente aplica las señales de potencia al motor de reluctancia conmutada. Mediante la comparación de los resultados obtenidos en la simulación y de modo experimental se validó la precisión del modelo obtenido.
Palabras clave: motor de reluctancia conmutada, Simulink, modelo no lineal, control a lazo cerrado, control a lazo abierto.
ABSTRACT
In the present paper a mathematical model for the WEKA SR-30102 switched reluctance motor was created using the Simulink development suite. In order to accurately model its behavior, the non-linearity of the motor was taken into account. The mathematical equations that describe the mechanical and electrical properties of the motor were used in order to accurately model the corresponding effects that occur inside the machine. Two different control strategies were created, that is, a closed loop using pulse width modulation and another one using hysteresis control. The mathematical model was validated comparing the experimental and the simulation results.
Key words: switched reluctance motor, Simulink, non-linear model, closed-loop controller, open-loop controller.
INTRODUCCIÓN
]]> La simulación constituye, hoy en día, una etapa necesaria en los trabajos de diseño o estudio del comportamiento de disímiles sistemas o procesos ingenieriles. Aunque los resultados obtenidos por la vía de la simulación no se consideran ni suficientes, ni determinantes, éstos se acercan cada vez más al comportamiento de las instalaciones reales. El desarrollo constante de simuladores cada vez más versátiles, y de potentes microcomputadoras digitales, permiten la realización de grandes volúmenes de cálculo en muy poco tiempo, lo cual propicia que el análisis matemático sobre muchos sistemas sea más eficiente.Para el desarrollo de los modelos y la simulación del lazo de control de la velocidad se seleccionó el Simulink del MATLAB. En la bibliografía consultada se hace referencia a dos vías fundamentales para el modelado de los motores de reluctancia conmutada (en lo adelante MRC) y sus accionamientos. Estas son:
Modelado a partir de un modelo lineal del motor [1].
Modelado a partir de un modelo no lineal del motor [1].
El modelado, cuando se considera que la máquina es un sistema lineal, es de los dos procedimientos el más sencillo, pues los modelos se desarrollan a partir de ecuaciones analíticas, y que se implementan con relativa facilidad. Este procedimiento presenta como desventaja la no consideración de las alinealidades en el motor, lo cual aleja de la realidad los resultados que se obtienen. Cuando se consideran las alinealidades en el modelo del motor es posible obtener resultados más precisos, pero el procedimiento para la simulación se dificulta y se vuelve más lento. Munyuen (2014) utiliza este enfoque para modelar un MRC trifásico con una configuración 10/6 [2].
Una variación de la variante anterior es utilizada por Uygun (2014) para modelar un MRC segmentado de pentafásico [3]. Este método usa combinaciones de ecuaciones algebraicas para modelar, el comportamiento no lineal del motor.
Cuando se desea modelar las alinealidades la metodología que predomina en la bibliografía es la utilización de tablas de lookup (en lo adelante LUT)de dos dimensiones para la aproximación de las relaciones existentes entre las variables de comportamiento del motor. García-Amorós (2013) utilizando una combinación entre el cálculo de elementos finitos y el uso de LUT modela un actuador lineal de reluctancia conmutada [4].Dicha metodología aportará resultados más precisos en la medida en que los datos de la máquina sean exactos y abundantes, e implicará menor cantidad de cálculos y mayor rapidez en la ejecución [5-7].
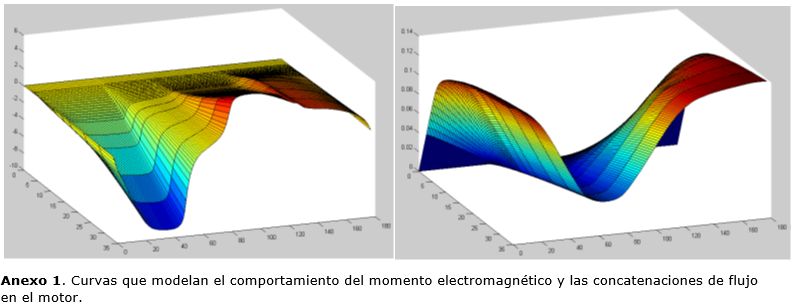
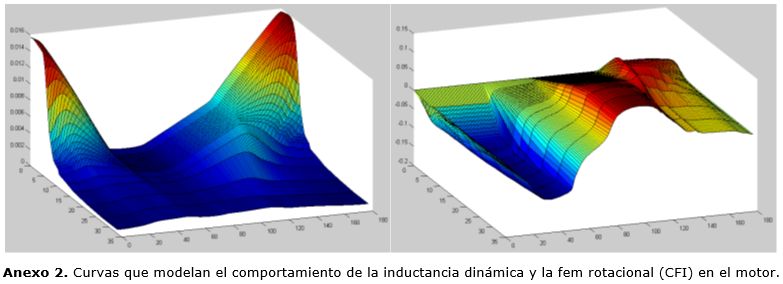
Tomando en cuenta lo planteado anteriormente se decidió tener en cuenta las no linealidades del MRC con el objetivo de obtener resultados más exactos. Esto se logró a partir de la utilización de LUT de dos dimensiones cuyos modelos están contenidos en la biblioteca Simulink. Los datos de las curvas de magnetización proporcionadas por el fabricante (ver anexo 1) fueron utilizados para la obtención de las curvas de inductancia dinámica por fase y de las derivadas de flujo con respecto al ángulo del rotor que se pueden observar en el anexo 2.
Diagrama en bloques del accionamiento del MRC modelado en MATLAB Simulink.
]]> En el presente epígrafe se explica, de manera detallada, el modelo matemático del accionamiento del MRC SR-30102 en forma de diagrama de bloques tal y como se muestra en la figura 1.Tomando en cuenta lo planteado anteriormente se modelaron los diferentes aspectos del motor y su control. Para facilitar la comprensión del modelo, este se dividió, en bloques individuales que concatenados de manera adecuada, simulan el comportamiento del accionamiento de los MRC. Estos bloques son.
Motor de Reluctancia Conmutada bifásico irregular WEKA SR-30102
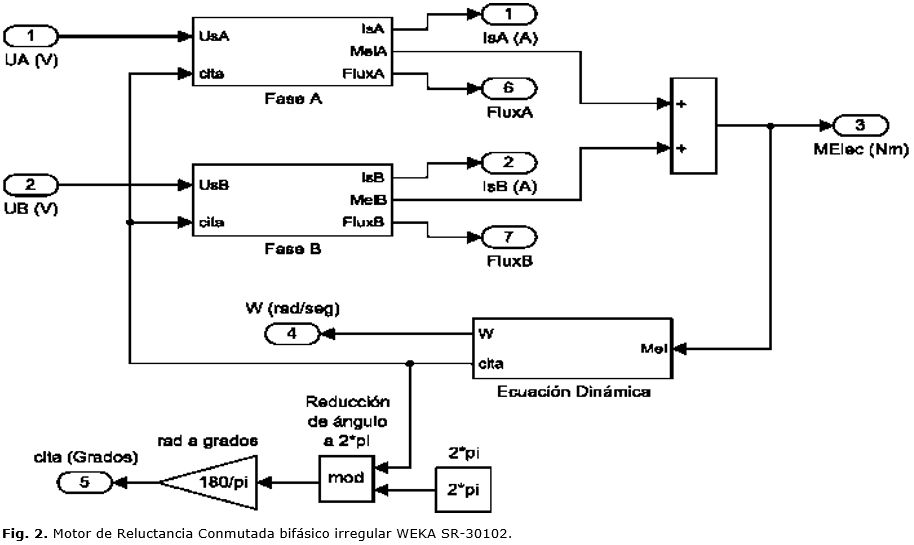
El bloque creado para la simulación del MRC bifásico irregular de fabricación alemana WEKASR-30102 con carga mecánica, se muestra en la figura 2. El objetivo de este bloque es la simulación, lo más acertada posible, de los parámetros del MRC.
Para la implementación de este modelo fueron utilizadas las expresiones mecánicas y eléctricas que modelan el comportamiento del MRC.
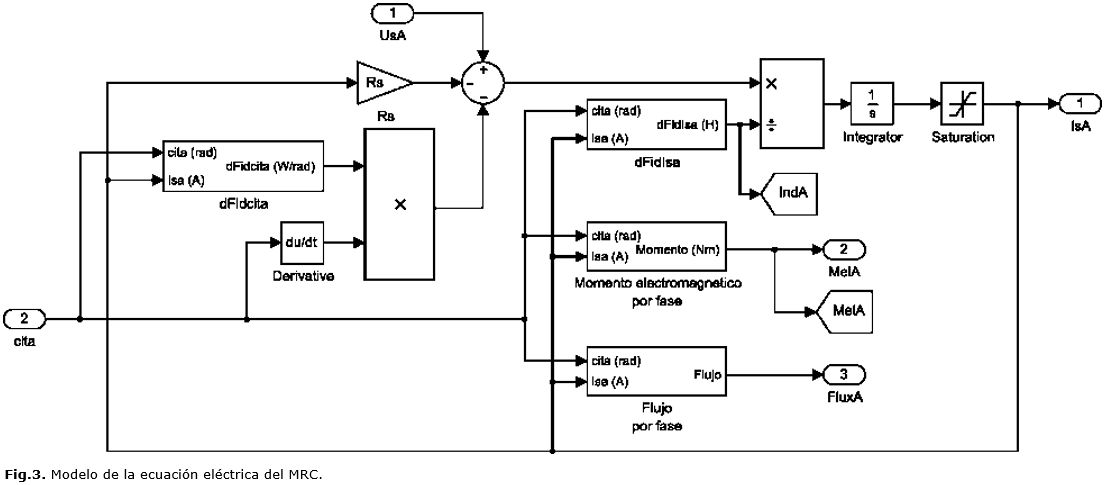
Ecuación Eléctrica.
La ecuación (1) se corresponde con la tensión de fase del MRC en el sistema de referencia del estator:
Asumiendo que no existe acoplamiento mutuo entre las fases del estator, la ecuación (1), puede ser desarrollada para la fase SA tal como se muestra en la ecuación (2):
]]> Despejandodonde:
USA: Tensión de fase.
RS : Resistencia de fase.
iSA : Corriente que circula por la fase.
![]() :es la inductancia dinámica.
:es la inductancia dinámica.
![]() : es la fem rotacional.
: es la fem rotacional.
![]() : Velocidad del motor.
: Velocidad del motor.
El bloque del MRC está compuesto por cuatro LUT que contienen la información necesaria para realizar los cálculos. El fabricante del motor suministró las tablas de flujo vs posición vs corriente y de momento electromagnético vs posición vs corriente. Tomando estas tablas como base se calcularon los restantes parámetros, dígase inductancia de fase y fem rotacional, mediante el uso de las ecuaciones (4) y (5) respectivamente:
]]>En la figura 3, se muestra la ecuación mecánica del MRC que fue creada tomando en cuenta lo planteado anteriormente.
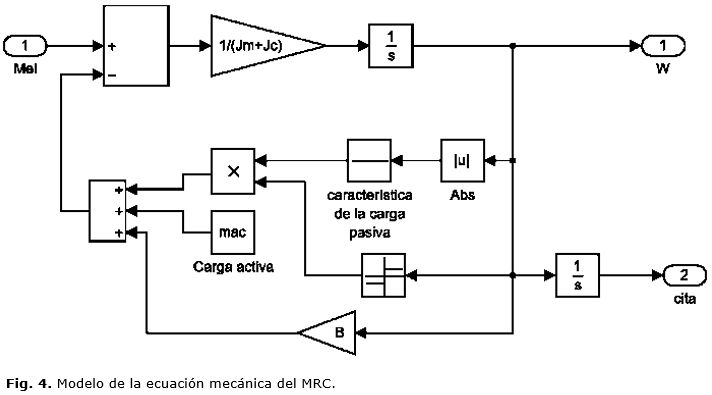
Ecuación Mecánica
Para modelar las variables mecánicas del MRC se utilizó la ecuación dinámica de los accionamientos eléctricos, tal y como se muestra en la ecuación (6):
Despejando de la ecuación (6) e integrando se tiene la ecuación (7):
donde:
ω : Velocidad del MRC en rad/s.J = JM + JC: Inercia total del sistema, compuesta por JM que es la inercia del motor y JC que es la inercia de la carga expresado todo en kgm2 y referidas al eje del motor.
]]> TEM: Momento electromagnético generado por el MRC en Nm.TL: Momento electromagnético de la carga en Nm.
B: Coeficiente de fricción viscosa en Nm/rad/s.
Normalmente el término Bω, que representa la fricción viscosa, puede ser despreciado debido a que a bajas velocidades no tiene una influencia significativa con respecto al momento electromagnético generado por el motor. En el caso particular del MRC a modelar, este término no puede ser despreciado ya que la velocidad nominal del motor es de 12 500 rpm pudiendo alcanzar velocidades superiores. Esto implica que el aporte de Bω no es despreciable y tiene que ser incluido en los cálculos para obtener una aproximación acertada del modelo físico que se desea.
En la figura 4, se muestra la ecuación mecánica del MRC que fue creada tomando en cuenta lo planteado anteriormente.
Encoder y activación de las fases
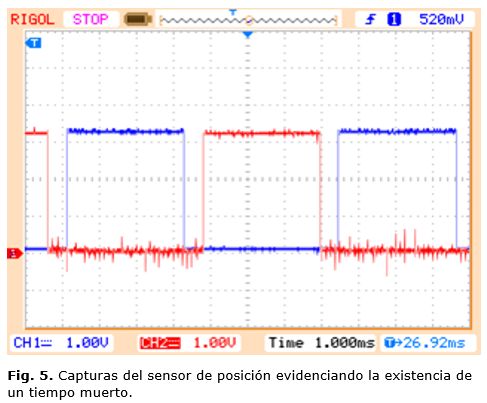
El MRC WEKA SR-30102, como se explicó anteriormente, cuenta con un sensor óptico acoplado mecánicamente al eje. Este sensor tiene una resolución de 2 bit, por lo que es capaz de dar, teóricamente, cuatro combinaciones lógicas, dígase 00, 01, 10 y 11. En la práctica esto no es posible debido a la interpretación física que tienen estas combinaciones. Lo planteado anteriormente se resume en la tabla 1.
El tiempo muerto mencionado anteriormente se produce debido a que al ubicarse los sensores en el estator existe un instante de tiempo en el que ninguno de los sensores es cortado por el discoranurado (figura 5).
]]> Este tiempo el simétrico a ambos lados del disco. Tomando esto en consideración se midieron las duraciones para cada uno de los estados y los resultados se muestran en la tabla 2.Controlador de Velocidad
Un regulador PID es un mecanismo de control por realimentación que calcula la desviación o error entre un valor medido y el valor que se quiere obtener, para aplicar una acción corrector a que ajuste el proceso. El algoritmo de cálculo del control PID se da en tres parámetros distintos: el proporcional, el integral, y el derivativo. El valor proporcional determina la reacción del error actual. El integral genera una corrección proporcional a la integral del error, esto nos asegura que aplicando un esfuerzo de control suficiente, el error de seguimiento se reduce a cero. El derivativo determina la reacción del tiempo en el que el error se produce. Ajustando estas tres variables en el algoritmo de control del PID, el controlador puede proveer un control diseñado para lo que requiera el proceso a realizar. Este comportamiento se expresa matemáticamente tal y como se muestra en la ecuación 8.
Debido a la característica no lineal del sistema a modelar los parámetros KP, KI, KD y no sepudieron calcular utilizando el método tradicional de síntesis de reguladores. Estos parámetros seobtuvieron de manera experimental a través del método de prueba y error.
RESULTADOS
Se exponen los experimentos realizados para la obtención y validación del modelo matemático creado en Simulink. Se muestran, además, los resultados obtenidos utilizando la estrategia de control a lazo abierto y a lazo cerrado para el control de la velocidad.
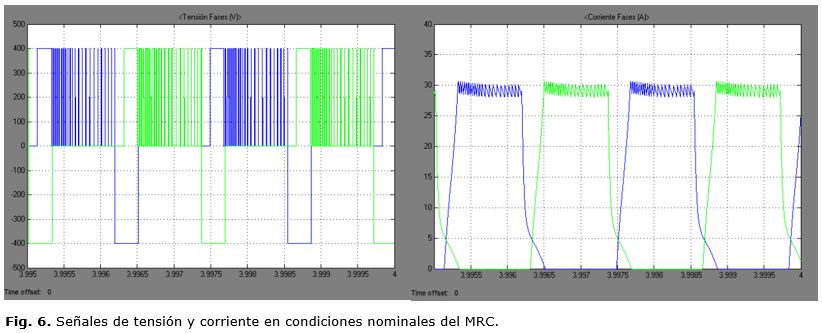
Lazo cerrado de la velocidad con control por histéresis de la corriente
]]> La primera de las estrategias de control implementadas para el MRC, es la que hace uso de una banda de histéresis de la corriente. La prueba realizada consiste en trabajar con las condiciones nominales del motor, dígase, tensión nominal en las fases (400 V), velocidad nominal en el eje (12 500 rpm) y carga nominal (2,25 Nm).Como se puede apreciar en la figura 6, se muestran las señales de tensión y corriente en las fases del MRC. En la gráfica de la corriente se puede notar el uso de la banda de histéresis de corriente, con una amplitud de 1 A.
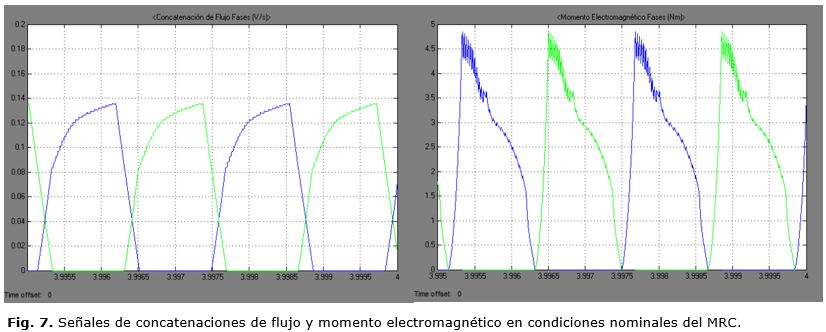
También se muestran los parámetros de las concatenaciones de flujo y momento electromagnético (figura 7).
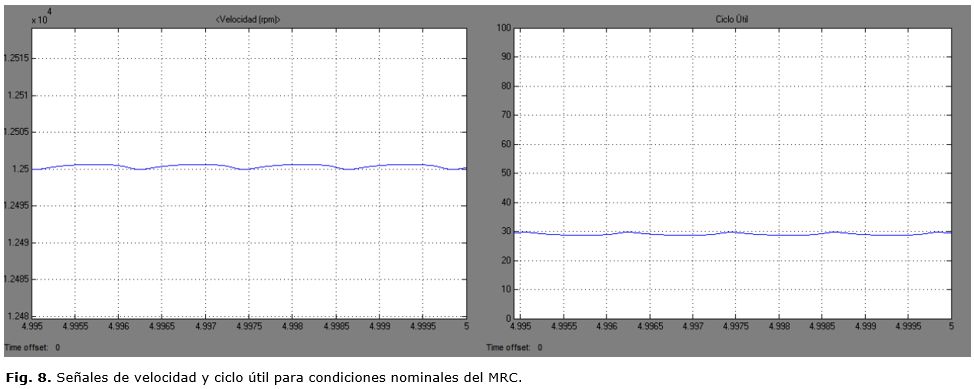
En la figura 8, se muestran las señales de velocidad en el eje del motor y el ciclo útil que fue ajustado por el regulador proporcional integral (PI) implementado utilizando la velocidad nominal como referencia.
Como se puede apreciar el error en el lazo de control es de apenas un 0,008% para estas condiciones de trabajo.
En la tabla 3, se resumen los resultados del lazo de control y su error para diferentes velocidades.
Como se puede apreciar en la tabla anterior se observa un incremento del error del regulador a medida que nos alejamos de las condiciones nominales. Esto se debe a las características no lineales del MRC. No obstante, el máximo error obtenido no supera el 1 %, por lo que se puede considerar como correcto el funcionamiento del regulador PI a lazo cerrado de la velocidad. En caso de que se desee obtener una señal de control con mayor precisión es necesario el uso de estrategias de control diferentes. Siendo posible el uso de técnicas de control utilizando inteligencia artificial, tales como: los reguladores fuzzy o las redes neuronales.
Control a lazo cerrado de la velocidad con modulación de ancho de pulso
Para verificar el control a lazo cerrado de la velocidad implementado se creó un banco de pruebas que se expone a continuación.
]]> La figura 9, muestra las señales de la tensión de fase, la corriente y la velocidad del MRC respectivamente. La prueba consiste en 4 puntos de operación diferentes. En la figura 9, la zona 1se corresponde al cambio de la posición estacionaria hasta 3 000 rpm. Luego de un segundo de simulación se cambia hacia un nuevo punto de operación (zona 2) fijado en 2 500 rpm. Un segundo más tarde se fija la referencia en 4 000 rpm (zona 3). Finalmente la referencia se fija en 2 000 rpm (zona 4).Cabe destacar que para desacelerar el motor se emplea la inercia del conjunto motor-carga y se apagan las fases del motor. Esto se debe a que no se ha implementado en el modelo ninguna técnica de frenaje.
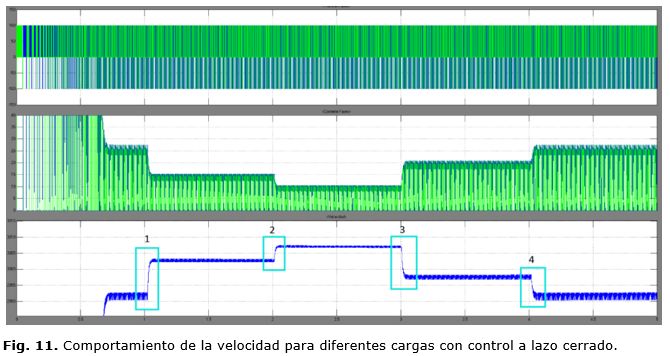
La figura 10, muestra las señales de la tensión de fase, la corriente y la velocidad del MRC respectivamente. La prueba consiste en 4 puntos de operación diferentes. En la figura 10, la zona 1se corresponde al cambio de la posición a plena carga (2,25 Nm) hasta el 50% de la carga nominal. Luego de un segundo de simulación se cambia hacia un nuevo punto de operación (zona 2) fijado al25% de la carga nominal. Un segundo más tarde se fija la carga en un 75% (zona 3). Finalmente la carga aplicada en el eje del motor se fija nuevamente al 100% (zona 4).
La figura 11, muestra una ampliación de la figura 10, para poder apreciar que los cambios dela de velocidad que ocurrieron debido a la variación de la carga son despreciables, ya que respecto a la velocidad fijada del motor representan un 0,5 %.
Validación del modelo realizado en Simulink
En la tabla 4, se muestran los resultados experimentales y de simulación de la velocidad del motor para 50 V de tensión en el enlace de corriente directa y diferentes ciclos útil aplicado al convertidor. Se tabulan además el error entre el valor de velocidad del modelo y el sistema físico real.
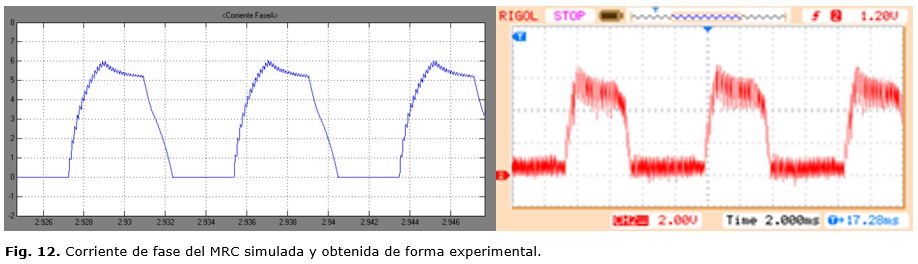
La figura 12, muestra la forma de onda de la corriente de fase del MRC WEKA SR-30102, como resultado de las simulaciones y los experimentos realizados en la instalación. Ambas curvas presentan igual forma y se aprecia que el valor máximo y mínimo alcanzado por el valor de la corriente es el mismo. Esto evidencia la similitud entre el modelo obtenido del motor y el sistema físico.
CONCLUSIONES
Se validó el modelo matemático creado en Simulink haciendo uso de los resultados de las simulaciones y de los resultados experimentales obtenidos del MRC WEKA SR-30102.
REFERENCIAS
1. KRISHNAN, Ramu, Switched Reluctance Motor Drives - Modeling, Simulation, Analysis, Design, and Applications, CRC Press, 2001. 416 p. ISBN 0-8493-0838-0.
2. MUNYUEN, Chaowish, et al., "A Comprehensive Model of a 6/10 Switched Reluctance Motor Based on Matlab Environment". Applied Mechanics & Materials. 2014, n. 535, p. 3-7. DOI:10.4028/www.scientific.net/AMM.535.3. ISSN: 16627482.
3. UYGUN, Durmus et al., "Linear Model of a Novel 5-Phase Segment Type Switched Reluctance Motor". Electronics & Electrical Engineering 20. 2014, n. 1, 6 p. DOI:10.5755/j01.eee.20.1.6159. ISSN 13921215.
4. GARCIA-AMORÓS, Jordi, et al. “Modelling and Simulation of a Linear Switched Reluctance Force Actuator”. IET Electric Power Applications 7. 2013, num. 5, p. 350–59. DOI: 10.1049/iet-epa. 2012.0391. ISSN 17518660.
5. Messai, F., et al., "Nonlinear 8/6 Switched Reluctance Generator Excited by Particular Converter". Journal of Theoretical & Applied Information Technology. 2012. vol. 45, no. 1, p. 33–37. ISSN 19928645.
6. Chen, Hao, et al., "Modeling, Simulation, and Experiment of Switched Reluctance Ocean Current Generator System". Advances in Mechanical Engineering. 2013. p. 1–14. DOI: 10.1155/2013/261241. ISSN 16878132.
7. Barhoumi, El Manâa, et al. "Design of a double-stator linear switched reluctance motor for shunting railway channels". Turkish Journal of Electrical Engineering & Computer Sciences. 2014. vol. 22, n. 2, p. 302–314. DOI: 10.3906/elk-1207-67. ISSN 13000632.
Recibido: marzo de 2015
Aprobado: junio de 2015
]]> AUTORES
Luis Manuel Álvarez Tapia. Ingeniero Electricista, Profesor Instructor, Centro de Investigaciones y Pruebas Electroenergética, CIPEL, Instituto Superior Politécnico José Antonio Echeverría, Cujae, La Habana, Cuba. e-mail: lalvarezt@electrica.cujae.edu.cu
]]>
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}