ARTICULO ORIGINAL
Análisis de los modos fundamental y de orden superior para acopladores de modo en sistemas satelitales
DESIGN OF A TM01 COMPACT MODE COUPLER FOR TRAKING MONO-PULSE SYSTEMS
Ing. Pablo Lanfranco Herrera1, MSc. Karen Cepero Llauger1, Dr. Ángel Mediavilla Sánchez2, Dr. Francisco Marante Rizo1
1. Departamento de telecomunicaciones y telemática, Instituto Superior Politécnico ¨José Antonio Echeverría¨,Cujae, La Habana, Cuba.E-mail: pignacio@electrica.cujae.edu.cu, marante@electrica.cujae.edu.cu ]]> 2. Universidad de Cantabria, Cantabria, España, media@dicom.unican.es
RESUMEN
En este trabajo se presenta el diseño de un sensor de modo para realizar seguimiento mono-pulso en sistemas de comunicaciones por satélite y radioastronomía. El dispositivo tiene dos ranuras paralelas para acoplar el modo de orden superior TM01 en guía de onda circular, lo cual posibilita que el diseño sea compacto y de tamaño reducido. Las salidas de los sensores de modo se unen empleando una unión T plano H. Un prototipo fue construido y medido en banda Ku (12,3-13,8 GHz) para validar los resultados teóricos. Las pérdidas de retorno obtenidas en el puerto correspondiente al seguimiento son mejores que -22dB. Los modos correspondientes a la señal fundamental tienen una adaptación mejor que -25dB sobre toda la banda de trabajo. Las señales utilizadas en estos sistemas para el seguimiento emplean polarización circular.
Palabras claves: Acopladores de modo, modo de orden superior, polarización circular, sistema compacto, sistema de seguimiento mono-pulso.ABSTRACT
A mono-pulse tracking mode coupler design for satellite communications and radio astronomy is presented. The device utilizes two parallel slots for sensing TM01 higher order mode which made the system more compact along with a very small size. The mode sensors are joined by an H plane T junction. A prototype was fabricated and tested for the Ku-band (12,3-13,8 GHz) for validate the theoretical results. The return loss obtained on the tracking port are better than -22dB. The return loss corresponding to the main signal are better than -25dB through the frequency band of work. These tracking systems utilize circular polarized signals.
Key words: Mode coupler, higher order mode, circular polarization, compact system, mono-pulse tracking system.
INTRODUCCION
En sistemas de comunicaciones por satélite y radioastronomía se emplea un mecanismo para realizar seguimiento, de manera que las antenas receptora y transmisora estén perfectamente alineadas en todo momento, asegurando un nivel adecuado de las señales. Para implementar esta función usualmente se emplea una señal llamada beacon, que suele ubicarse en los extremos de la banda receptora o fuera de la banda de trabajo. Sin embargo en determinados sistemas donde se transmite ininterrumpidamente puede emplearse la señal principal para realizar el seguimiento, como es el caso del diseño requerido en este trabajo.
En la literatura se encuentran referenciadas varias técnicas para realizar seguimiento [1]. Las tres opciones válidas para realizar seguimiento automático son: detección secuencial de amplitud,seguimiento electrónico y sistemas mono-pulso. Sin embargo en muchas ocasiones se opta por la tercera solución, ya que los sistemas de seguimiento mono-pulso son muy precisos, rápidos y su funcionamiento no se afecta ante señales interferentes AM. La desventaja de los sistemas mono-pulso radica en la alta complejidad para procesar la señal error, aspecto cada vez menos determinante dado el desarrollo de la electrónica, además requieren de al menos dos canales coherentes para recibir.
Las arquitecturas mono-pulso emplean comparación espacial en amplitud, comparación de fase o comparación de fase-amplitud. Los sistemas mono-pulso más simples emplean cuatro o más antenas tipo bocinas para obtener la señal suma y las señales diferencia en azimut y elevación. Pero estos sistemas son muy grandes y requieren de varios amplificadores. Debido a esto se desarrollaron diseños que emplean sólo una antena; estos son los llamados sistemas mono-pulso de varios modos.
Estos sistemas trabajan con el modo principal y los modos de orden superior. El objetivo es capturar estos modos para realizar la comparación de fase o fase-amplitud de los mismos con respecto a la señal principal. Los sistemas en guía de onda circular emplean el modo fundamental TE11s,c como señal principal o patrón suma y algún modo de orden superior (TM01, TE21, TE21s, TE21c) llamado patrón diferencia para realizar el seguimiento [2].
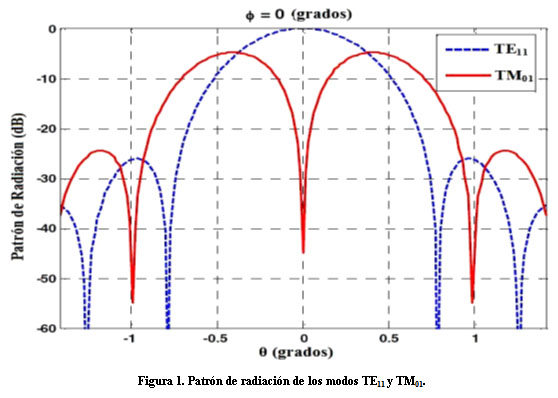
Estos modos de orden superior pueden emplearse para realizar seguimiento debido a que en un sistema de comunicaciones cuando la antena transmisora y la receptora comienzan a desalinearse, la amplitud del modo fundamental empieza a variar muy lentamente, sin embargo los modos de orden superior comienzan a excitarse (los cuales son nulos en la dirección de apuntamiento) logrando valores significativos para pequeños ángulos de desalineación, como puede observarse en la Figura 1. Específicamente la Figura 1 muestra el patrón de radiación de los modos TE11s y TM01, basándose en las ecuaciones (1) para el modo fundamental y en las (2), (3) para el modo de orden superior [3].
]]> Para el modo TE11: ecuación (1)Para el modo TM01: ecuación 2 y 3
La señal error es amplificada y comparada con la señal referencia correspondiente al modo fundamental. Las salidas del comparador son suministradas a una unidad de coordinación que alimenta a los motores de las antenas en azimut y elevación para corregir el ángulo de apuntamiento.
DISCUSION DEL DISEÑO
Para diseñar un acoplador de modo para realizar seguimiento mono-pulso se debe determinar el modo de orden superior que se quiere acoplar, ya que según la estructura del campo se diseñan las ranuras de acoplo. Además se debe determinar si se emplea sensores para uno o más modos [4].
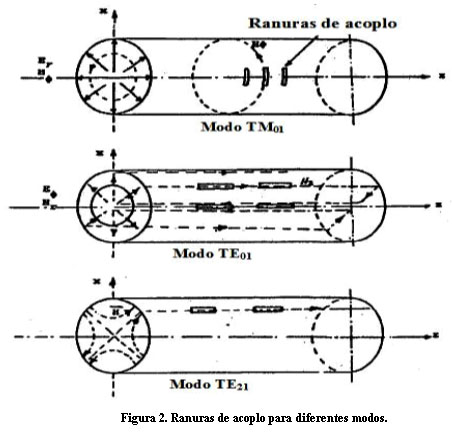
]]> ACOPLADORES DE MODOPara lograr sistemas más compactos es necesario emplear solo una o dos ranuras de acoplamiento. Estas deben ubicarse longitudinalmente o transversalmente en la pared de la guía de onda, dependiendo del tipo de modo [5].
La Figura 2 muestra diferentes configuraciones para tres modos de orden superior. Las ranuras de acoplo deben estar en la dirección de las líneas de campo magnético cercanas a las paredes de la guía de ondas [7]. De esta manera la elección de cualquiera de los modos de orden superior para realizar seguimiento queda determinado por la facilidad de acoplar el modo.
INFORMACION ANGULAR PARA REALIZAR SEGUIMIENTO
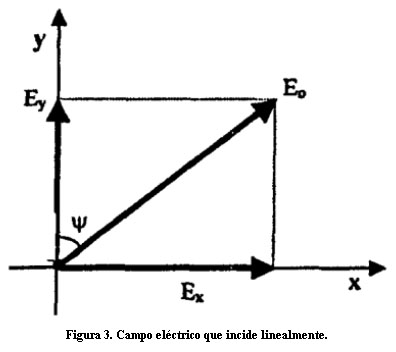
La señal de salida del sensor de modos depende de la polarización del campo eléctrico incidente y de la desviación angular respecto al eje de la antena [6].
Si se supone el campo eléctrico incidente en el alimentador de la antena tiene una amplitud Eoy con un ángulo Ψ con respecto al eje y como se observa en la Figura 3.
]]> Las componentes de campo que excitan el sensor de modo son [6]: ecuación 4 y 5
La salida del sensor de modo en función de y está dada por [6]: ecuación 6 y 7
Donde Δazes un coeficiente que depende de la desviación en la azimut y Δel es un coeficiente que depende de la desviación en la elevación.
Para detectar las señales de error en la elevación y en la azimut separadamente se requiere de un segundo sensor que capte otro modo de orden superior, de manera que la salida del segundo sensor está dada por: ecuación 8 y 9
]]>Combinando las salidas de los dos sensores en fase cuadratura, la salida total está dada por [6]: ecuación 10
De la ecuación anterior se observa que la salida total de los dos sensores contiene la información de la azimut y la elevación de la señal error en fase cuadratura, las cuales pueden separarse en el receptor de seguimiento mediante un procesamiento adecuado de la señal [6].
Las señales con polarización circular tienen sus componentes Ex y Ey en fase cuadratura, es por esto que es suficiente con un solo sensor de modo para extraer la información del seguimiento [7]. (ecuación 11 y 12)
El diseño del sistema de seguimiento presentado en este trabajo solo requerirá de un sensor de modo, en este caso para acoplar el TM01, pues se emplean señales con polarización circular [8].
]]> PROPUESTA DE DISEÑO
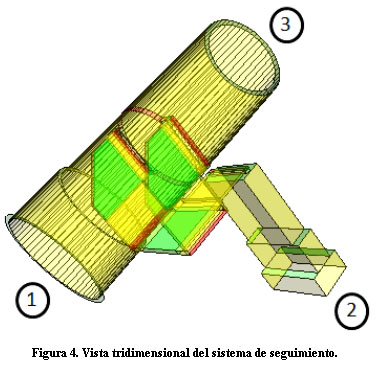
Debido a los requerimientos de un diseño compacto, y que trabaje con señales con polarización circular se propuso acoplar el modo de orden superior TM01 mediante el empleo de dos ranuras paralelas. La Figura 4 muestra una vista tridimensional del sensor de modo. Como se puede observar está compuesto por tres puertos físicos, aunque puede tener tantos puertos eléctricos como modos tenga en cada puerto.
El puerto uno es el de entrada, por tanto el radio tiene que ser lo suficientemente grande para que permita la propagación del modo fundamental y del TM01 a la frecuencia que se vaya a trabajar. El puerto tres va conectado usualmente al transductor orto-modo [9], y el radio debe ser más pequeño, de manera que la frecuencia del modo TM01 esté por encima de la banda de interés, y de esta forma evitar que se propague en el resto de los elementos componentes del sistema de alimentación de antenas [10], [11].
El puerto dos es el que va a capturar al modo TM01 que se excita en el sistema cuando ocurre una desalineación entre las antenas transmisora y receptora. Como se puede observar en la figura los sensores se ubican longitudinalmente debido a la distribución del campo electromagnético de este modo. Se emplearon un par de codos para sumar las señales en fase en una unión T plano H. Finalmente se diseñó una transición [12], de varios pasos para obtener a la salida del sensor de seguimiento una guía de onda estándar WR75.
El dispositivo se ha diseñado y optimizado usando la adaptación modal convencional y los planteamientos FEM integrados en Mwizard-Mician [13].
DISEÑO MECANICO
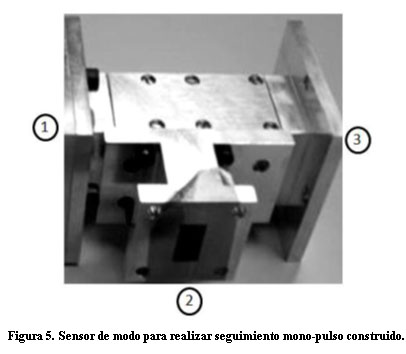
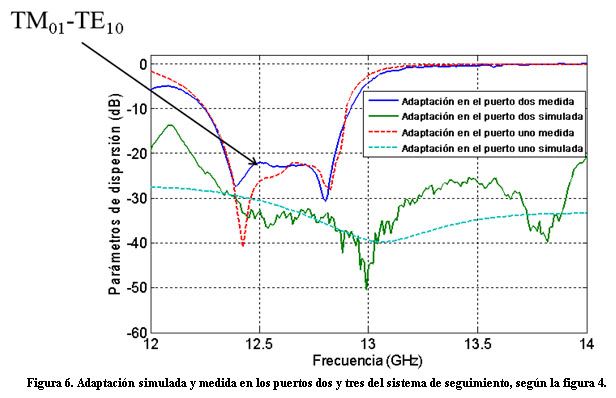
El sensor de modo para realizar seguimiento mono-pulso se construyó por partes, de forma tal que las guías de ondas rectangulares queden dividas a la mitad. Estas partes se atornillan formando un conjunto como se muestra en la Figura 5. El dispositivo fue construido utilizando las técnicas clásicas de fresado con una precisión de ±0,05mm, permitiendo su construcción en el país. Cabe señalar que esta precisión en el fresado ha aumentado los efectos de los campos en el interior del acoplador de forma adversa a lo simulado, es por ello, que el comportamiento de los parámetros dispersos varía [ver Figura 6]. El fresado mientras más preciso sea, mas real serán las medidas obtenidas mediante el software. No obstante se cumplen los objetivos, ya que el diseño del acoplador de modo se realizo solo para una parte de la banda de trabajo.
Los puertos señalados en la Figura 5 corresponden a los mostrados en la Figura 4.
]]>
RESULTADOS TEORICOS EXPERIMENTALES
La Figura 6 muestra la adaptación en el puerto de tracking o puerto dos como se muestra en la Figura 4. Este valor está en el orden de -22 dB en un 3% de ancho de banda relativo. Se debe mencionar que en este diseño se empleó una parte de la banda utilizada para la recepción para realizar el seguimiento. La figura muestra además la adaptación en el puerto de entrada del tracking al modo TE11s, que es el modo principal que puede afectarse por el sensor diseñado para el seguimiento. Para el TE11c ésta ranura es irrelevante.
CONCLUSIONES
En este trabajo se ha presentado el diseño de un sensor de modo para realizar seguimiento mono-pulso mediante el acoplo del modo de orden superior TM01. Una de las principales características de este diseño es que es compacto, ya que solo se emplearon dos ranuras de acoplo. Este sistema funciona para señales con polarización circular; en caso de requerirse emplear señales con polarización lineal habría que añadirle al sistema otro para algún otro modo de orden superior, cuya frecuencia de corte sea lo más pequeño posible.
]]> RECONOCIMIENTOS
Los autores quieren expresar su gratitud hacia la agencia española para la cooperación al desarrollo Internacional (AECID) a través de la acción integrada D/024003/12.
REFERENCIAS
1. CEPERO, K. et al. «Monopulse Tracking design for unmanned aerial vehicles». En actas de International Travelling Summer School, 2010, vol.1, pp.58-63
2. CEPERO, K. et al. «Highly efficient monopulse tracking feed subsystem for unmanned aerial Vehicle». En actas de la 41 Conferencia Europea de microondas, 2011, Vol.26, pp.1106-1110.
3. NICKEL, U. «Overview of generalized monopulse estimation». IEEE Aerospace and Electronic Systems Magazine, 2006, vol. 21, núm. 6, pp. 2756.
4. SAKR, L. «The higher order modes for automatic tracking and determination of attitude angles of satellites». En actas de URSI, 1991, Vol.18, pp.897-901.
5. ERGENE, AHMET,ZARRO, MICHAEL. «Tracking feed for multi-band operation» Patente de EstadosUnidos, No. 6812807, 2004.
6. SONG, M. Z.; HONG T. «Sum and difference multiple beam modulation transmitted by multimode horn antenna for inverse monopulse direction-finding», Progress In Electromagnetics Research, 2008, vol. 92 pp. 367380.
7. NATEGHI, J.; MOHAMMADI L. «The Comparison between the TE2l Mode and the Four-Horn Monopulse Technique for LEO Satellite tracking». En actas de ICACT, 2010, vol. 104 pp. 978986
8. CHOUNG, Y.H»Wideband TM01 mode travelling wave coupler». IEEE Microwave Antennas Propagation, 1997, vol. 144, No. 5, 315-320.
]]>9. CEPEROLLAUGER,K.; MEDIAVILLA SANCHEZ,A.; MARANTE RIZO,F.:»Diseño de un Transductor Ortomodo con Polarizador de gran ancho de banda para aplicaciones de satélite», in 15 Convención de Ingeniería y arquitectura2010: La Habana. p. 5.
10. CHANG, K. Encyclopedia of RF and Microwave engineering. Nueva York: John Wiley & sons, 2005. pp.1187-1257 ISBN 959-261-587-342-6.
11. TRIBAK; CEPERO, K; MEDIAVILLA, ANGEL; BOUSSOUIS,M.;CHAIBI, GONZALES, O.:»Sistema dealimentación de antenas con dual polarización circular» en el XXV Simposium Nacional de la Unión Científica Internacional de Radio, URSI 2010, España, septiembre 2010.
12. LANFRANCO HERRERA, PABLO I. S.:«Diseño de Transiciones en banda Ku para aplicaciones de satélite»,Trabajo de diploma para optar el título de Ingeniero en Telecomunicaciones y Electrónica, La Habana, 2011.
13. MICIAN MICROWAVE WIZARD 5.6, «Mode matching, fast hybrid MM/2D finite element analysis and optimization tool» .
]]>
Recibido: Abril 2014
Aprobado: Mayo 2014
]]>







{kind=link}
{kind=link}