ARTÍCULO ORIGINAL
Simulación numérica de un nuevo sensor de anisotropía magnética
Numeric Simulation of a new magnetic anisotropy sensor
Gustavo Eugenio Carro-Hernández, Carlos Manuel Cruz-Inclán, Josué Arteche-Díaz, Antonio Leyva-Fabelo
Centro de Aplicación Tecnológica y Desarrollo Nuclear. CEADEN. La Habana. Cuba. ]]>
RESUMEN
El objetivo del trabajo es evaluar la aplicabilidad de la metodología empleada para la determinación de las tensiones residuales con el sensor de anisotropía magnética SAM0 a una nueva versión más avanzada SAM2. Se realizó la caracterización de la función de respuesta del nuevo sensor utilizando la simulación numérica, observándose que la misma presenta una periodicidad con respecto a las posiciones angulares en que se rotó el mismo para un valor dado de anisotropía magnética. Se demostró la existencia de una dependencia lineal entre los valores de la FEM medidas con el nuevo sensor y los valores de anisotropía magnética de la muestra. Las FEM medidas en los tres circuitos del SAM2 son equivalentes a las de tres sensores del primer modelo orientados a 120? entre sí. Se demuestra la aplicabilidad de la función de respuesta del SAM0 para describir las lecturas de su nueva versión.
Palabras claves: sensor de anisotropía magnética, tensiones residuales, método de elementos finitos.
ABSTRACT
The aim of this study is to evaluate the applicability of the residual stresses determination methodology, previously used with magnetic anisotropy sensor SAM0, with the new more advanced sensor SAM2. The characterization of the new sensor response function was carried out using the numeric simulation. A periodic behavior with respect to the rotated angular positions for a given value of magnetic anisotropy was observed. A lineal dependence between the EMF values measured with the new sensor and the sample magnetic anisotropy was demonstrated. The EMF measured in the three SAM2 circuits are equivalent to those obtained for three SAM0 sensors, oriented 120° between them. The applicability of the SAM0 response function to describe the measurements made with the new sensor was established.
Key words: magnetic anisotropy sensor, residual stress, finite element method.
]]>
INTRODUCCIÓNLas Tensiones Residuales (TR) de primer género, o macrotensiones, se hallan presentes prácticamente en todo material manufacturado o de estructura ensamblada. En los procesos de soldadura, recargue, tratamientos térmicos, proyección térmica, recubrimientos galvánicos y termodifusivos, o como resultado de procesos donde la deformación plástica esté presente, es importante conocer el comportamiento de las TR que se encuentran presentes en las piezas a producir o recuperar [1].
Existen varios métodos utilizados para la determinación de las TR [2], encontrándose entre los más comunes los basados en la medición de las propiedades mecánicas, que son métodos destructivos, y los métodos basados en la difracción de radiaciones, que aunque son no destructivos, sí requieren equipos de alta complejidad y elevados costos. En cambio, los métodos magnéticos (en especial los basados en la anisotropía de la permeabilidad magnética) son más sencillos, económicos, portátiles, además de ser no destructivos.
Se conoce de la utilización de Sensores de Anisotropía Magnética (SAM) para la medición de TR desde hace más de dos décadas. Por ejemplo, en 1987 Yamada [3] describe la teoría en la que se basa un SAM, con el cual es posible la medición de TR de flexión sin necesidad de contacto entre la superficie de la muestra y el sensor. En 1998 Govindaraju [4] emplea por primera vez el Método de Elementos Finitos (MEF) [5] mediante el software ANSYSTM EMAG como herramienta para el diseño de un nuevo SAM. Este autor relaciona la frecuencia de excitación del sensor con el poder de penetración de las líneas del campo magnético que pasan a través del material de estudio con el fin de evaluar las TR que se encuentran a diferentes profundidades. En el 2004, Sakai [6] extiende la aplicación de sensores SAM a superficies cilíndricas realizando la medición de tensiones en líneas de tuberías. Liu en el 2011 [7] realiza un análisis teórico exhaustivo de la señal de salida de un SAM llegando a la conclusión de que el voltaje de salida del sensor es proporcional a la diferencia de las tensiones principales y está relacionada con sus direcciones. Esta serie de trabajos muestra el interés internacional por el desarrollo de los SAM como herramienta para la medición de tensiones en diferentes situaciones prácticas.
Debido a la importancia del seguimiento y control en la industria cubana de las TR se han desarrollado en el Centro de Aplicaciones Tecnológicas y Desarrollo Nuclear, CEADEN, de Cuba, diferentes versiones de SAM. La primera de ellas se denominó SAM0 [8], cuya función de respuesta toma en consideración que la frecuencia del campo magnético excitador tiende a cero; es decir, el campo se considera cuasi estático y que las secciones transversales de los circuitos de excitación y de lectura se desprecian en comparación con la distancia entre sus puntas. En el 2006 se consolida la creación del equipo medidor de TR denominado "TENSO" y se realizan mejoras al sensor SAM0 sobre la base de utilizar materiales de mayor calidad Permalloy C [9]. Este sensor es empleado en el 2011 para la evaluación de TR en barras cilíndricas de acero sometidas a rodadura en frío [10, 11].
La figura 1 muestra los principales componentes del sensor SAM0, que consta de un circuito magnético excitador, formado a su vez por una bobina de cobre enrollada a un núcleo de hierro, y un circuito magnético de lectura con las mismas características que el de excitación pero orientado a 90? con respecto al primero. El circuito de lectura es el encargado de medir las variaciones de la Fuerza Electromotriz (FEM) generadas por la anisotropía magnética (Δµ), inducidas a su vez por las tensiones mecánicas (Δσ) existentes en la muestra.
El procedimiento para el uso del SAM0 consiste en colocar las puntas sobre la superficie de un material ferromagnético y manualmente hacer rotar al sensor para colocarlo en, al menos, tres posiciones angulares (0º,120º,240º), tomando la lectura de la FEM en cada uno de estos puntos (ε(ϑ)). Con ello se obtienen tres valores de ε(ϑ), necesarios para resolver el sistema de ecuaciones generado a partir de la ecuación 1 que permite determinar la amplitud de la función de respuesta A (A=ε2Δµ), el ángulo α que forman los ejes de las tensiones principales con los ejes de referencia x y y, y el coeficiente ε0, que es una constante y no depende de las tensiones aplicadas. Los valores de anisotropía magnética Δµ determinados siguiendo este procedimiento van a ser proporcionales a las TR existentes en la muestra [6]. ]]>
![]()
Con el fin de simplificar este procedimiento y de evitar la ocurrencia de errores en la medición, fue propuesto un nuevo sensor de anisotropía magnética denominado SAM2. La idea original de este sensor se basa en colocar tres sensores SAM0 en las tres posiciones angulares antes mencionadas (0º,120º,240º). Posteriormente con el objetivo de disminuir el tamaño del sensor, se integraron las tres bobinas de excitación a un solo circuito magnético con una única bobina y se conservaron los tres circuitos magnéticos de lectura independientes. En la figura 2 se muestran la distribución de los diferentes componentes del SAM2 y las dos muestras en las cuales se posicionó el sensor en la simulación (caso (A) y caso (B)).
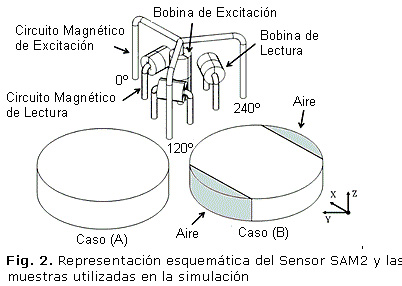
El objetivo de este trabajo es demostrar mediante la simulación numérica que la ecuación 1 para la determinación de los parámetros ε2Δµ y α como parte de la metodología utilizada en el SAM0 continúa siendo aplicable al nuevo sensor SAM2 para los casos de dos situaciones prácticas diferentes: (A) para muestras donde los bordes se encuentran alejados de las puntas de excitación, y (B) cuando los bordes se encuentran cercanos a éstas, situación en que se manifiesta el denominado "efecto de borde". También se pretende demostrar que el sensor SAM2 se comporta como tres sensores SAM0 orientados a 120º uno con respecto al otro.
MATERIALES Y MÉTODOS ]]>
Para la resolución de las complejas ecuaciones diferenciales que definen el comportamiento de los campos magnéticos, en las distintas configuraciones del sistema SAM2+Muestra se utilizó el MEF, empleando como herramienta el sistema de códigos COMSOL Multiphysics versión 4.0.Se calculó el comportamiento de los campos magnéticos realizando un estudio dependiente del tiempo perteneciente al módulo AC/DC del software. Este proceder permite resolver la ecuación 2 utilizando como aproximación un modelo cuasi-estático:
![]()
donde ![]() es el inverso del tensor de la permeabilidad magnética, P es el potencial magnético, M es la magnetización, σ' es la conductividad eléctrica, t es el tiempo y Je es la densidad de corriente externa, que debido a sus características se puede representar como se muestra en la ecuación 3.
es el inverso del tensor de la permeabilidad magnética, P es el potencial magnético, M es la magnetización, σ' es la conductividad eléctrica, t es el tiempo y Je es la densidad de corriente externa, que debido a sus características se puede representar como se muestra en la ecuación 3.
![]()
]]>
donde ie (0,1 A) es la corriente que pasa por los cables que conforman la bobina de excitación, S es la sección transversal de la bobina de excitación y f (700 Hz) es la frecuencia de Je. En la tabla 1 se muestran las propiedades de los materiales que conforman el modelo utilizado en la simulación numérica, donde µr es la permeabilidad relativa y εr la permitividad relativa.
Las condiciones de frontera del modelo se establecieron considerando que toda la superficie externa de la muestra y del material aislante se encuentra aislada magnéticamente. Con esta opción se asume que la componente normal del vector densidad del flujo magnético (![]() ) en dicha superficie es igual a cero
) en dicha superficie es igual a cero ![]() . Esta condición es válida cuando se considera que la superficie externa se encuentra rodeada de aire, por lo que las líneas de flujo no escapan del modelo asumido. En la bobina excitadora se asume la presencia de una densidad de corriente externa, cuyas componentes
. Esta condición es válida cuando se considera que la superficie externa se encuentra rodeada de aire, por lo que las líneas de flujo no escapan del modelo asumido. En la bobina excitadora se asume la presencia de una densidad de corriente externa, cuyas componentes ![]() y se describen mediante las ecuaciones 4 y 5.
y se describen mediante las ecuaciones 4 y 5.

En el modelo se empleó el elemento tipo tetraédrico, donde se varió su tamaño en tres regiones, dependiendo de la exactitud necesaria para determinar la función de respuesta. En la tabla 2 se observan los tamaños utilizados en el modelo y en la figura 3 se muestra un ejemplo del mallado realizado para el caso (A). ]]>
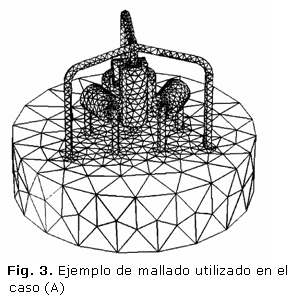
El tiempo t empleado en la simulación se dividió en intervalos Δt = T/4 s, donde T es el período de la oscilación de la corriente, desde un t0 = 0 s hasta t = 50Δt s.
En el caso (A) se introdujeron variaciones en los valores principales µi del tensor de la permeabilidad magnética ![]() en el plano xy de la muestra. Los valores de µ1 se aumentaron manteniendo µ2 fijo, creando de esta forma una anisotropía de la permeabilidad magnética
en el plano xy de la muestra. Los valores de µ1 se aumentaron manteniendo µ2 fijo, creando de esta forma una anisotropía de la permeabilidad magnética ![]() . También para cada valor de Δµ se hizo variar α cada 15nπ/180 grados (n=0; 1; 2; 3;…24), lo que es similar a considerar que el sensor se está rotando en estas posiciones angulares. Estos cambios se realizaron conforme al tensor 6:
. También para cada valor de Δµ se hizo variar α cada 15nπ/180 grados (n=0; 1; 2; 3;…24), lo que es similar a considerar que el sensor se está rotando en estas posiciones angulares. Estos cambios se realizaron conforme al tensor 6:
Para el caso (B), donde se consideran los bordes cercanos a las puntas de excitación, se aumentó la anisotropía magnética en la dirección axial y para cada valor de anisotropía magnética se rotó el sensor en las mismas posiciones angulares que el caso (A).
Los cambios de anisotropía magnética introducidos en las muestras en una determinada dirección se considera que fueron inducidos mediante la aplicación de tensiones mecánicas que se encuentran en la misma dirección. Esto es debido a la dependencia lineal existente entre estos parámetros para pequeños valores de anisotropía magnética [9].
Posteriormente se extrajeron los valores de FEM generada a partir de la componente ![]() que se encuentra en dirección normal a la sección transversal de los núcleos magnéticos de lectura. Para el cálculo de la FEM en cada bobina de lectura del sensor SAM2 se utilizó la ecuación 7.
que se encuentra en dirección normal a la sección transversal de los núcleos magnéticos de lectura. Para el cálculo de la FEM en cada bobina de lectura del sensor SAM2 se utilizó la ecuación 7.

]]>
donde k es el número de nodos que se encuentran en dicha sección y Nl es el número de vueltas del enrollado de las bobinas de lectura.
ANÁLISIS DE LOS RESULTADOS
Como resultado de la simulación se obtuvo el comportamiento de la FEM con respecto a la posición angular para diferentes valores de anisotropía de la permeabilidad magnética en las tres bobinas de lectura para los dos casos estudiados. Estos valores se ajustaron por el método de Mínimos Cuadrados [12] a la función de respuesta utilizada en el SAM0 mostrada en la ecuación 1. En la figura 4 (a), (b) y (c) se representan las lecturas de las bobinas 1, 2 y 3 respectivamente del caso (A), mientras que en la figura 5 (d), (e) y (f) se muestran las correspondientes al caso (B).

Para conocer el grado de correlación entre la función de respuesta ε(θ) utilizada en el SAM0 y los valores de la FEM obtenidos en la simulación, se realizó una regresión lineal entre ellos para determinar el coeficiente de correlación lineal R2 en cada valor de anisotropía magnética. En la figura 5 se presentan algunos ejemplos para los dos casos estudiados, y en la tabla 3 se muestra el coeficiente R2 obtenido para todos los valores de anisotropías magnéticas simulados.
]]>
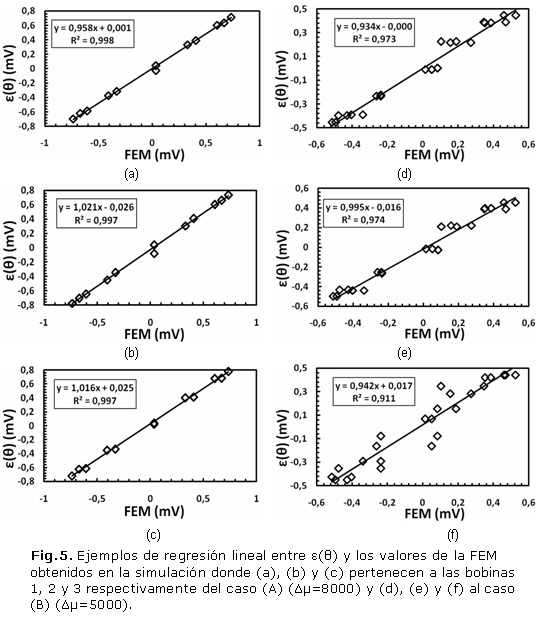
En los resultados mostrados se observa una buena correlación entre los valores de la FEM obtenidos en la simulación numérica y la ecuación 1. Se puede notar que en el caso (B) los valores de R2 resultan ligeramente menores, lo cual puede estar relacionado con el empleo de un modelo geométrico más complejo, no simétrico (ver Fig. 2), que provoca la no-homogeneidad en la FEM con relación al caso (A) (modelo geométrico simétrico), y por lo tanto una pequeña desviación de su comportamiento con respecto a la función de respuesta. Específicamente este fenómeno es atribuible al "efecto de borde".
El desfasaje que se observa entre las lecturas de cada bobina en la figura 4 se debe a la distinta posición angular relativa en que se encuentran cada una de ellas.
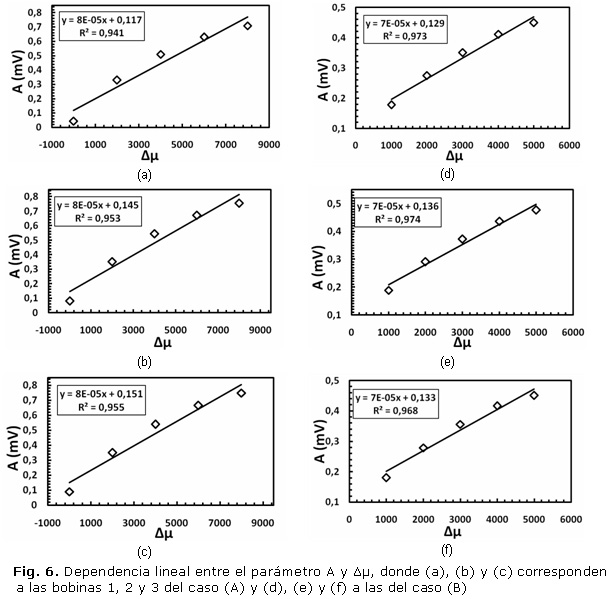
A partir de estos resultados se determinó el grado de dependencia lineal entre los valores de la amplitud de la función de respuesta (A) y los valores de anisotropía magnética introducidos. En la figura 6 se muestran dichas dependencias pudiéndose apreciar la existencia de una buena correspondencia.
Como se puede apreciar, para cada caso estudiado, los resultados que se obtienen son similares independientemente de la bobina que se analice y están en correspondencia con la ecuación 1. Esto nos permite confirmar que cada circuito de lectura del sensor SAM2 se comporta como un sensor SAM0.
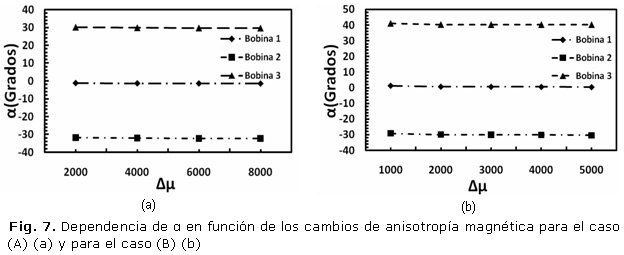
La dependencia de la dirección de la anisotropía magnética con respecto a los ejes de referencia x y y con respecto a los valores de Δµ introducidos en la simulación es presentada en las figura 7 (a) y (b).
Se puede observar que α se mantiene constante, lo cual indica que este parámetro es independiente de los cambios de anisotropía magnética y sólo depende de la dirección en que ésta se encuentra. ]]>
CONCLUSIONES
Mediante la simulación numérica utilizando el Método de Elemento Finitos se verificó la aplicabilidad de la función de respuesta empleada en el sensor de anisotropía magnética SAM0 al nuevo sensor SAM2.
La relación lineal obtenida entre los parámetro A y Δµ en cada bobina de lectura para cada caso simulado, demuestra el carácter constante del parámetro ε2, lo que permite establecer la existencia de una relación igualmente lineal entre la amplitud de la función de respuesta y la diferencias entre las tensiones principales en el plano xy.
La simulación muestra que la dirección en que se encuentra la anisotropía magnética con respecto a los ejes de referencia, no depende de las variaciones de Δµ, y que existe una dependencia lineal entre la amplitud de la señal FEM en cada circuito de lectura con respecto a los valores de Δµ. Se pudo observar que el valor calculado de α se mantiene constante ante los cambios de la anisotropía magnética introducidos en la simulación, solo dependiendo de la dirección en que Δµse encuentra.
Se concluyó que el nuevo sensor SAM2 puede ser considerado como si estuviese integrado por tres sensores SAM0 orientados a 120º, demostrándose que es posible el empleo de la metodología utilizada para determinación de las tensiones residuales con el sensor SAM0 en el nuevo sensor avanzado SAM2 para los dos casos estudiados.
REFERENCIAS
1. Hauk, V. Structural and residual stress analysis by nondestructive methods. 1ra ed. E. U. A.: Elsevier. 1997, p. 8-15. ISBN 0-444-82476-6. ]]>
2. Withers, P., Turski, M., Edwards, L., et al. "Recent advances in residual stress measurement". International Journal of Pressure Vessels and Piping. 2008, vol. 85, nº 3, p. 118-127. ISSN 0308-0161. DOI: 10.1016/j.ijpvp.2007.10.007.
3. Yamada, H., Ushiyama, S., Takeuchi, K. et al. "Non-contact measurement of bending stress using a magnetic anisotropy sensor". IEEE Transactions on Magnetics. 1987, vol. 23, nº 5, p. 2422-2424. ISSN 0018-9464. DOI 10.1109/TMAG.1987.1065329.
4. Govindaraju, M., Katragadda, G. y Wallace, J. L. "Finite element analysis of a magnetic sensor to detect permeability changes due to residual stresses in ferromagnetic materials". SPIE Proceedings. 1998, vol. 3396, nº 47, p. 47-55. ISSN 0277-786X. DOI 10.1117/12.301535.
5. Bathe, K. "Finite Element Method". En: Wiley encyclopedia of computer science and engineering. USA: John Wiley & Sons Ed. 2007. ISBN 9780471383932. DOI 10.1002/9780470050118.ecse159.
6. Sakai, Y., Unishi, H. y Yahata, T. "Non-destructive method of stress evaluation in line pipes using magnetic anisotropy sensor". JFE Technical Report. 2004, nº 3, p. 47-53. ISSN 1883-7263. ]]>
7. Liu, H., Dun, C., Dou, L. et al. "Theoretical analysis of magnetic sensor output voltage". Journal of Magnetism and Magnetic Materials. 2011, vol. 323, nº 12, p. 1667-1670. ISSN 0304-8853. DOI10.1016/j.jmmm.2011.01.034.
8. Cruz, C., Suarez, J., Fernández, L., et al. "Magnetoelastic sensor". En: Fourth European Conference on Residual Stresses. Cluny, France. 1996, p. 283-288.
9. Cruz, C., López, N., Martín, J. et al. "Desarrollo y consolidación de una versión avanzada del equipo medidor de tensiones residuales TENSO". En: Congreso Iberoamericano de Metalurgia y Materiales. IBEROMET 2006, Cuba. 2006, p. 332-340. ISBN 959-282-26-1.
10. Herrera, V., Cruz, C., Sierra, J. et al. "Use of X ray diffraction and magnetoelastic effect for assessment of microstructural parameters and residual stresses in plastically deformed steel bars". En: XIII Workshop on Nuclear Physics and VII International Symposium on Nuclear and Related Techniques WONP-NURT´2011. Cuba. 2011, p. 164-170. ISBN 978-959-7136-79-8.
11. Fernández, T., Rodríguez, I., Quintana, R. et al. "Determinación de tensiones por rayos X del Acero AISI 1045 deformado por rodillo". Ingeniería Mecánica. 2012, vol. 15, no 1, p. 23-33. [Consultado el: 12 de Marzo de 2012]. Disponible en: http://www.ingenieriamecanica.cujae.edu.cu/index.php/revistaim/article/view/398/740. ISSN 1815-5944. ]]>
12. Montgomery, D., Runger, G. y Hubele, N. Engineering statistics. Fourth Ed. USA: John Wiley & Sons. Ed. 2008, p. 286-309. ISBN 0470526947, 9780470526941.
Recibido: 2 de noviembre de 2012.
Aceptado: 25 de marzo de 2013.
Gustavo Eugenio Carro-Hernández. Centro de Aplicación Tecnológica y Desarrollo Nuclear. CEADEN. La Habana. Cuba
Correo electrónico: gcarro@ceaden.edu.cu ]]>
{kind=link}
{kind=link}
{kind=link}