Control no lineal mediante Linealización Aproximada aplicada en el sistema no lineal Posición de un anillo sobre un aro rotatorio
Nonlinear control by Approximate linearization applied to the non-linear system of a ring on a rotating ring
Jissie Vaquero López1*, Carlos Luis Milian del Valle2
1 Grupo de Planificación y Control de la UEB Automática Industrial. Tecnomática. jissiev@gmail.com
2 Departamento de Programación, Universidad de las Ciencias Informáticas. Carretera San Antonio de los Baños km dos y medio. Reparo Torrens. La Habana, Cuba. Código Postal 10400. cluismilian@uci.cu ]]>
*Autor para la correspondencia: jissie@tm.cupet.cu
RESUMEN
En este artículo se presenta el método de linealización aproximada como técnica de control de sistemas físicos no lineales alrededor de un punto de operación. Se introduce la técnica de linealización aproximadamediante una representación integral de las ecuaciones de estado. Se propone ver al sistema no lineal como una ecuación integral y analizar el efecto de pequeñas perturbaciones alrededor de un punto de equilibrio constante. Despreciando los términos de orden superior del efecto de tales perturbaciones y reteniendo solamente los términos lineales, se presenta en un solo esquema la linealización que aproxima el comportamiento del sistema perturbado. Se realiza la simulación con un modelo que representa la posición de un anillo sobre un aro rotatorio. La simulación es realizada en Matlab® ya que el mismo es útil al momento de ilustrar las propiedades del sistema no lineal controlado estudiado y el comportamiento de la estrategia de control propuesta. Matlab® es un ambiente numérico de propósito general orientado al uso de estructuras de tipo vectorial y matricial, el cual permite ejecutar algoritmos secuenciales con una amplia gama de aplicaciones. El uso principal que se le dio fue como programa de simulación numérica, es decir, se hizo uso de los algoritmos que tiene disponibles para la obtención de las soluciones de sistemas de ecuaciones diferenciales ordinarias. Finalmente se analizan los resultados obtenidos de aplicar dicha técnica de control en este modelo.
Palabras clave: técnicas de control, sistema no lineal, linealización aproximada, simulación en Matlab®
ABSTRACT
In this paper the method of approximate linearization technique is presented as control of nonlinear physical systems around an operating point. The Approximate linearization technique is introduced through a comprehensive representation of the state equations. It is intended to see the nonlinear system as an integral equation and it is analyzed the effect of small perturbations around a breakeven point. Neglecting higher order terms of the effect of such disturbances and retaining only the linear terms, is presented in a single linearization scheme that approximates the behavior of the perturbed system. Simulation is carried out with a model that represents the position of a ring on a rotary ring. The simulation is performed in Matlab® since it is useful to illustrate the properties when the non-linear controlled system behavior studied and control strategy proposed. Matlab® is a general purpose numerical environment oriented structures using vector and matrix type, which allows to execute sequential algorithms with a wide range of applications. The main use was given as numerical simulation program that means that the algorithms were used for obtaining available solutions of ordinary differential equations systems. Finally, the results of applying the technique of control in this model are analyzed.
Key words: technical of control, nonlinear system, approximate linealization, simulation in Matlab.
INTRODUCCIÓN
Las técnicas clásicas de control se han desarrollado con base en modelos lineales (o linealizados) de los sistemas físicos. Sin embargo, en el sentido estricto, todos los sistemas presentan algún tipo de no linealidad. Como consecuencia, las técnicas lineales son válidas solo alrededor de puntos de operación donde se cumplan las condiciones de controlabilidad, (Crossley, 1991), (Slotine, 1991).
Sobre los sistemas no lineales, los controladores clásicos normalmente cumplen tareas de regulación alrededor de puntos de equilibrio. El rango de validez del esquema de control depende principalmente de la naturaleza del sistema, siendo más restrictivas aquellas no linealidades fuertes que producen grandes diferencias entre los modelos real y linealizado de la planta, aun en puntos cercanos al punto de operación, (Tomei,1992).
Cuando la tarea de control involucra el seguimiento de trayectorias sobre rangos de operación amplios, los métodos lineales pierden su validez en los casos de no linealidades fuertes y presentan un pobre desempeño aun en sistemas levemente no lineales. Por esta razón se hace necesaria la implementación de técnicas no lineales con las que se logre un control global o en su defecto, una región de operación más amplia, (Slotine, 1991), (Isidori, 1995).
MATERIALES Y MÉTODOS
En la mayoría de los casos prácticos, un sistema no lineal de una entrada y una salida (SISO) puede modelarse como, (Fliess, 1995), (Hassan, 1996), (Rathina, 1997):
Los puntos de equilibrio del sistema ![]() son aquellos elementos del espacio de estado que satisfacen la relación
son aquellos elementos del espacio de estado que satisfacen la relación ![]() , lo que directamente conduce a la expresión
, lo que directamente conduce a la expresión ![]() .
.
Un estado de equilibrio ![]() es asintóticamente estable para el sistema si las trayectorias en el espacio de fase convergen hacia
es asintóticamente estable para el sistema si las trayectorias en el espacio de fase convergen hacia ![]() desde alguna vecindad
desde alguna vecindad ![]() y es inestable si las trayectorias que inician desde puntos arbitrariamente cercanos a
y es inestable si las trayectorias que inician desde puntos arbitrariamente cercanos a ![]() son divergentes. Si el estado inicial de un sistema corresponde a un punto de equilibrio y la entrada y las perturbaciones son cero, entonces el sistema permanecerá indefinidamente en ese estado, es decir, si u = 0 entonces
son divergentes. Si el estado inicial de un sistema corresponde a un punto de equilibrio y la entrada y las perturbaciones son cero, entonces el sistema permanecerá indefinidamente en ese estado, es decir, si u = 0 entonces ![]() .
.
En particular, el sistema lineal definido por el modelo de estado ![]() tiene un único punto de equilibrio en x = 0 si A es no singular. De lo contrario, tendrá infinitos puntos de equilibrio.
tiene un único punto de equilibrio en x = 0 si A es no singular. De lo contrario, tendrá infinitos puntos de equilibrio.
La linealización aproximada está fundamentada en retener como válida para la descripción de un sistema en las vecindades de un punto de equilibrio, a aquella representación que se obtiene de los términos de primer orden de la expansión en serie de Taylor de la no-linealidad que caracteriza al sistema como tal. Desde este punto de vista, las exigencias que hemos impuesto al sistema son de diferenciabilidad por lo menos hasta un primer orden, (Hassan, 1996; H. Sira-Ramírez, 2005).
Esta técnica propone ver al sistema no lineal como una ecuación integral y se analizará el efecto de pequeñas perturbaciones alrededor de un punto de equilibrio constante.
El método de la linealización aproximada es válido en tanto que las perturbaciones que afectan al comportamiento del sistema no lineal, operando en equilibrio, sean pequeñas, relativas a los valores de equilibrio de las variables del sistema, (Ogata, 2003).
Se designará mediante la matriz A de n filas y n columnas, la matriz ![]() particularizada en el punto de equilibrio constante (X,U). Mediante el vector B de n filas designaremos al vector
particularizada en el punto de equilibrio constante (X,U). Mediante el vector B de n filas designaremos al vector ![]() evaluado en (X,U). Igualmente, designaremos mediante el vector fila C al vector
evaluado en (X,U). Igualmente, designaremos mediante el vector fila C al vector ![]() , evaluado en X.
, evaluado en X.
Por lo que la siguiente ecuación diferencial representa un sistema de ecuaciones diferenciales lineales en ![]() A este sistema se le llama representación (lineal) en el espacio de estado, brevemente, representación de estado.
A este sistema se le llama representación (lineal) en el espacio de estado, brevemente, representación de estado.
Las matrices constantes (A, B, C), llamadas matrices Jacobianas, que definen a esta aproximación lineal están dadas por, (Ogata, 2003):
![]()
Es por esto precisamente que a la linealización aproximada también se le llama con el nombre de linealización jacobiana.
Sobre la base de estas relaciones aproximadas se propondrá un esquema de control que estabilice el sistema no lineal a su punto de equilibrio bajo el criterio de que las variaciones del sistema son pequeñas alrededor de este punto de equilibrio.
Para el diseño del controlador se debe cumplir con las condiciones de controlabilidad y observalidad requeridas. La condición necesaria y suficiente para que el sistema lineal sea estabilizable mediante una ley de control por realimentación del vector de estado es que el determinante de la matriz de controlabilidad sea distinto de cero
![]()
Una vez que se determine que el sistema es controlable se puede representar la ley de control lineal de la siguiente forma: u = -Kx
Es decir, el método de la linealización aproximada permite, en principio, el uso de cualquiera de los métodos de diseño de controladores inherentemente válidos para sistemas lineales, siempre que se cumpla, (Nijmeijer, 1990), (D'Atellis, 1995):
El modelo linealizado cumpla con las condiciones de controlabilidad y observalidad requeridas.
Se diseñe un controlador, en base al análisis llevado a cabo sobre el sistema linealizado, el cual induzca una estabilización local del sistema no lineal, alrededor de su punto de equilibrio.
RESULTADOS Y DISCUSIÓN
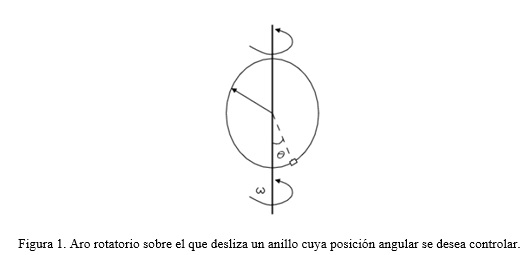
Considerando el caso de un anillo que se desliza sin roce sobre un aro que se puede hacer girar a velocidad angular ω, regulable a voluntad (ver Figura 1). Se desea mantener el valor del ángulo ![]() en un valor constante deseado dado por
en un valor constante deseado dado por ![]() = x. La variable de control en este caso está constituida por el cuadrado de la velocidad angular u = ω2 y por lo tanto debe ser siempre positiva, (H.Sira-Ramírez, 2005; Markiewic, 1973). El radio del aro, que se supone indeformable por efecto de la fuerza centrífuga, está dado por a.
= x. La variable de control en este caso está constituida por el cuadrado de la velocidad angular u = ω2 y por lo tanto debe ser siempre positiva, (H.Sira-Ramírez, 2005; Markiewic, 1973). El radio del aro, que se supone indeformable por efecto de la fuerza centrífuga, está dado por a.
El modelo del sistema está dado por:
]]>
Por lo que el modelo en variables de estado de este sistema está dado por las siguientes ecuaciones diferenciales, (H.Sira-Ramírez, 2005).
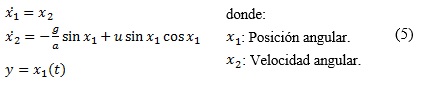
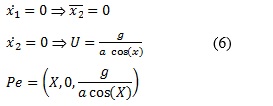
El punto de equilibrio Pe del sistema se obtiene a partir de las ecuaciones diferenciables, igualando a cero las derivadas de la variable de estado.
Dado que el modelo obtenido es no lineal, se linealiza el sistema alrededor del punto de equilibrio, (H.Sira-Ramírez, 2005). Para realizar la linealización se debe tomar en cuenta que se trata de un sistema de segundo orden, con lo cual las matrices A, B, C están dadas por:
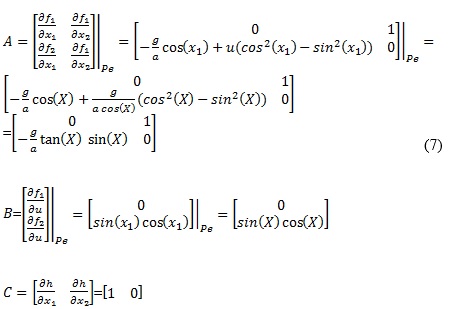
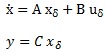
Por lo que la linealización del sistema alrededor del punto de equilibrio es:

Obteniendo la matriz de controlabilidad para nuestro sistema de segundo orden para determinar si el sistema es estabilizable:

Por lo tanto, se deduce que el sistema es completamente controlable.
A continuación, se utiliza la ley de control lineal expresada como:

El polinomio característico (Pc) del sistema lineal en lazo cerrado será:
![]()
Resolviendo la ecuación anterior, e igualando el polinomio obtenido a un polinomio deseado (Pd) definido como:
]]>
Para simular el sistema no lineal controlado, se realizaron dos programas que llamaremos el programa de simulación y el sistema o modelo a simular. El programa de simulación permite definir los lineamientos básicos de la simulación: tiempo de simulación (inicial y final), condiciones iniciales y tipo de algoritmo de simulación (ode23, ode45, . . .); inclusive se puede definir los parámetros del sistema controlado y hasta graficar los resultados de la simulación. Este programa consiste en un conjunto lógico de instrucciones de ejecución secuencial denominado “script” en el ambiente Matlab®, (Mathworks Inc, 2014). El corazón principal de este programa es el algoritmo de simulación. En este artículo utilizaremos solamente dos tipos: ode23 o ode45, los cuales son métodos de resolución de ecuaciones diferenciales mediante las fórmulas de Runge-Kutta de 2do. y 3er. orden (ode23) y 4to. y 5to. Orden (ode45). El modelo a simular se presenta por medio de un programa o función, llamado function en Matlab®, en el cual se plantean explícitamente las ecuaciones diferenciales asociadas al sistema de control. Esencialmente, posee dos parámetros de entrada, el tiempo t de simulación y la variable de estado x, debido a que éstas son las variables utilizadas directamente por los algoritmos de simulación. Junto con las ecuaciones diferenciales que representan el modelo sistema, debe aparecer la ley de control diseñada, la cual puede estar definida a través de variables auxiliares (locales). Dichos programas permitieron graficar y simular el controlador para las siguientes condiciones iniciales.
a=0.2; g=9.8; X = 0.7854; wn=12.83; sig=0.707;
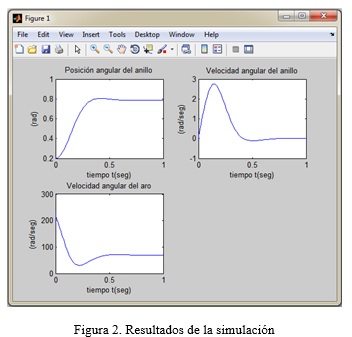
Se realizó una corrida para el punto x0 = [0.2 0] cercano al punto de equilibrio deseado, obteniéndose las siguientes gráficas.
La figura muestra los resultados obtenidos luego de la simulación del sistema, en este gráfico se observa la posición angular del anillo, la velocidad angular del anillo, y la velocidad angular del aro, los cuales se comportan de forma deseada.
CONCLUSIONES
En este trabajo se ha estudiado la dinámica de un método de control a un sistema no lineal conocido como lo es la posición de un anillo sobre un aro rotatorio. En el análisis del sistema se han empleado la linealización aproximada como técnica de control de sistemas físicos no lineales alrededor de un punto de operación y se presentaron los resultados obtenidos al aplicar este método de control al sistema no lineal presentado.
Es necesario acotar que, en el análisis del comportamiento de sistemas dinámicos no lineales, el método de la linealización aproximada será útil en la vecindad de su punto de equilibrio, siempre y cuando las perturbaciones que afectan la evolución del sistema sean suficientemente pequeñas.
]]> Como se pudo apreciar, el método de la linealización aproximada también es útil no sólo en el análisis sino, en particular, en el diseño de estrategias de control que mantengan la evolución del sistema en un entorno alrededor del punto de equilibrio nominal. Adicionalmente, constituye la base, junto a los puntos de equilibrio parametrizados, del método de linealización extendida. Es oportuno señalar, además, que el método de la linealización aproximada no es aplicable a sistemas que exhiban no linealidades carentes de derivadas.
REFERENCIAS BIBLIOGRÁFICAS
CROSSLEY, P.R; J.A. COOK. A nonlinear engine model for drivetrain system development. In Control 1991. Control '91. International Conference on, vol.2, mar 1991. p.921-925.
D'ATELLIS, CARLOS E.; “Introducción a los Sistemas No Lineales de Control y sus Aplicaciones” AADECA, 1992. p.6-15.
FLIESS, MICHEL; LÉVINE, JEAN; PIERRE, ROUCHON. Flatness and defect of nonlinear systems:Introductory theory and examples. International Journal of Control, 1995. p. 1327-1361.
HASSAN K. KHALIL; “Nonlinear Systems”, Prentice Hall, 1996. p. 603-716.
H. SIRA-RAMÍREZ; R. MÁRQUEZ; F. RIVAS ECHEVERRÍA, O. LLANES-SANTIAGO; “Control de Sistemas No Lineales: Linealización Aproximada, extendida, exacta”, Prentice Hall, 2005. p. 3-147.
]]> ISIDORI, ALBERTO. “Nonlinear Control Systems”, Tercera ed. Springer, Inglaterra, 1995. p.33-89.KHALIL, H.K. Nonlinear systems. Macmillan Pub. Co., 1992. p.76-89.
LEVINE, JEAN. Analysis and Control of Nonlinear Systems a Flatness-based Approach. Springer Berlin Heidelberg, 2009. p.27-85.
MARKIEWICZ, B. Analysis of the computed-torque drive method and comparison with the conventional position servo for a computer-controlled manipulator. The Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California, 3 1973. p.33-601.
NIJMEIJER, HENK; ARJAN VAN DER SCHAFT; "Nonlinear Dynamical Control Systems”, Springer Verlag, 1990. p.12-26.
OGATA, KATSUHIKO. Ingeniería de Control Moderna. Prentice Hall, 3era. edición, 2003. p.57-129.
]]>RATHINAM, M. Diferentially at nonlinear control systems. PhD thesis, California Institute of Technology, 1997.
SLOTINE, JEAN-JACQUES. LI, Wiping. “Applied Nonlinear Control”. Prentice Hall, Estados Unidos, 1991. p.47-87.
THE MATHWORKS. (2015). "The MathWorks, Accelerating the pace of engineering and science".http://www.mathworks.com/
TOMEI R. MARINO. Nonlinear Control Design. Prentice Hall, 1992. p.114 -131.
Recibido: 21/04/2015
Aceptado: 07/03/2016