COMUNICACIÓN BREVE
Diseño de órtesis activa para cirugías prolongadas
Design of an active orthosis for prolonged surgery
Mauricio Plaza Torres, William Aperador Chaparro, Andres Cifuentes Bernal
Universidad Militar Nueva Granada. Bogotá, Colombia.
]]>
RESUMEN
Estar en posición estáticas por tiempo prolongado es perjudicial para la salud por los esfuerzos que se ejercen en las articulaciones inferiores. Los problemas incluyen dolor muscular, presiones dañinas en las articulaciones de la cadera, rodilla y tobillos y daños en los pies como deformaciones, ampollas, pie plano y dolor puntual en los talones, artritis en las articulaciones de rodilla y cadera, alta presión arterial y limitación de movimiento articular. El presente documento se relacionó con la patente de invención (Resolución 61468), aplicada a la Ingeniería médica (Bioingeniería) y se refirió a un dispositivo para ser usado en salas de cirugía con el objetivo de reducir los riesgos de lesión de espalda de los médicos cirujanos y la liberación de presiones en los miembros inferiores, mediante soportes que disminuyen las cargas que tiene que soportar su sistema músculo esquelético durante una intervención quirúrgica de larga duración. Dicho dispositivo de órtesis activa proporcionó soporte a la región pélvica, redujo las cargas soportadas por la espalda baja, no incomodó al médico durante la intervención y evitó daños en las piernas tales como la vena varice mediante la reducción de las cargas que se soportan por tiempo prolongado.
Palabras clave: órtesis activa; exoesqueleto; bioingeniería; sistemas músculo esquelético.
ABSTRACT
Remaining in a static position for a long time is damaging to health, due to the effort made by lower limb joints. Problems include muscle pain, pressures harmful to hip, knee and ankle joints, as well as damage to the feet such as deformities, blisters, flat feet and point pain on the heels, arthritis of the knee and hip joints, high blood pressure and limited joint movement. The present document refers to an invention patent (Resolution 61468) from the field of medical engineering (bioengineering), a device to be used in operation rooms to reduce the risk of back injury among surgeons, releasing pressure from lower limbs by means of supports that reduce the load to be carried by their skeletal muscle system when performing prolonged surgery. The active orthosis device provides support to the pelvic region, reduces the loads supported by the lower back, does not inconvenience the surgeon during the intervention and prevents damage to the legs such as varicose veins by reducing the loads to be carried for a long time.
Key words: Active orthosis; exoskeleton; bioengineering; skeletal muscle systems.
INTRODUCCIÓN
Hoy en día se diseñan exoesqueletos para superar las limitaciones humanas o en algunos casos para suplir las limitaciones ocasionadas por enfermedad o accidentes. Los exoesqueletos son usados en amplios campos de la ingeniería y la medicina, desde el área militar hasta la rehabilitación biomecánica. La mayoría de estos dispositivos son diseñados para las extremidades inferiores debido a que esta parte del cuerpo es la encargada de soportar la mayor parte del peso corporal y la locomoción y por ser la más vulnerable a lesiones que otras partes del cuerpo.
Hay dispositivos que han aportado grandes avances a este tipo de aplicaciones por su construcción que requiere de un diseño robusto y unas técnicas de construcción avanzadas. Uno de los dispositivos más reconocidos a nivel militar es el “Berkeley Lower Extremity Exoskeleton (BLEEX)”. Con este dispositivo se desarrolló tecnologías fundamentales asociadas con el diseño y control de un exoesqueleto autónomo eléctrico para las extremidades inferiores aumentando la fuerza y el desempeño durante la locomoción. El sistema HAL de cyberdyne, uno de los exoesqueletos más avanzados, es concebido desde sus inicios para ayudar a los ancianos y a las personas discapacitadas.1,2
Entre los exoesqueletos con aplicaciones médicas se encuentra el AKROD, un dispositivo para rehabilitación que se centra en la articulación de la rodilla y desarrolla un diseño muy innovador para la rehabilitación a pacientes con accidentes cerebro vasculares que sufren de híper-extensión de la rodilla, en la fase de apoyo de la marcha y de flexión reducida de la rodilla durante la fase de balanceo (patente N 0045374,2008).3,4
Para reducir lesiones de espalda en los cirujanos durante las intervenciones quirúrgicas, se han usado taburetes altos o las sillas de inclinación de la pelvis, estos sistemas son estáticos y no se ajustan a la necesidad de movimientos del médico, y no pueden ser usadas sino en pocos tipos de intervención con limitaciones de posiciones y grados de libertad.5,6
DESCRIPCIÓN DEL DISPOSITIVO
El dispositivo de órtesis activa para cirugía consta de estructura mecánica y electrónica de control. La utilidad del dispositivo está en las salas de cirugía con el fin de disminuir cargas sobre las articulaciones del médico durante una intervención quirúrgica de larga duración. El dispositivo debe dar soporte a la región pélvica, reducir las cargas soportadas por la espalda baja y es ajustable a las posiciones programadas. El dispositivo evita problemas de salud ocupacional como venas varice entre muchos otros problemas relacionados con presión en las articulaciones y músculos de los profesionales que se encuentran sometidos a largos periodos en posición erguida.7,8
]]> Se realizó un diseño conceptual que cumple con estas características de posiciones y soporte de peso, de lo cual surgen en las imágenes de la figura 1.
El diseño cuenta con un soporte para la pelvis que permite la inclinación de acuerdo a las necesidades de posición de los médicos cirujanos, reduciendo las fuerzas ejercidas en las articulaciones inferiores. Se incluyó un soporte que va al pecho, el cual reduce las cargas soportadas por la espalda transmitiéndolas al dispositivo.9 La estructura soporta el peso del médico y se adapta a las posiciones programadas que son más frecuentes en los diferentes tipos de cirugías.
ESTRUCTURA MECÁNICA
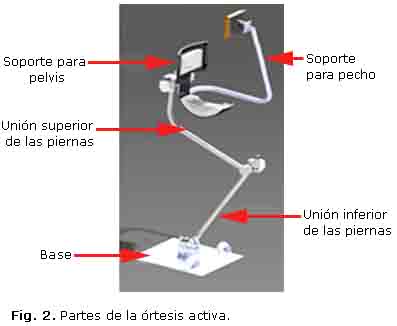
La estructura del dispositivo tiene 4 partes fundamentales que son la base, la unión inferior de las piernas, la unión superior de las piernas, el soporte para pelvis y soporte para pecho. El material seleccionado para ese dispositivo es al acero inoxidable, debido a que este dispositivo va a estar dentro de una sala de cirugía, requiere que sea fácil de limpiar y no presente degradación por contaminación de fluidos como la sangre. Este material nos da además de la fácil esterilización, una resistencia mecánica las condiciones de peso y movimiento (Fig. 2).
Se selecciona para esta aplicación motores instalados en las distintas articulaciones para adquirir las posiciones que se necesiten durante su funcionamiento. Los motores ofrecen la potencia y velocidad que son ideales para reducir las cargas que tiene que soportar el peso del médico cirujano.
DESCRIPCIÓN DEL COMPONENTE BASE
El componente base es el encargado de soportar toda la estructura, por lo cual se diseña para ser anclado al piso mediante pernos. Tiene un soporte para los pies, de forma tal que el usuario del dispositivo tenga una posición adecuada y un soporte principal desde el cual se van a anclar un motor, el eje de soporte de articulación inferior y la unión inferior de las piernas (Fig. 4).
DESCRIPCIÓN DEL COMPONENTE EJE DE SOPORTE ARTICULACIÓN INFERIOR
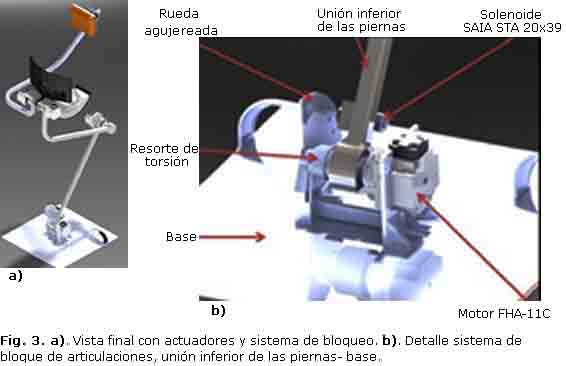
El eje de soporte de la articulación inferior está diseñado con el propósito de poder encajar la unión inferior de las piernas a la base y al motor. Este componente tiene un soporte circular agujereado para el sistema de bloqueo, que permite la entrada del eje del en las distintas posiciones que se programan para el dispositivo. Así mismo está diseñado con una pestaña que permite encajar el resorte de torsión y limita su movimiento a lo largo del eje (Fig. 5).
]]>Este componente de la estructura es el encargado de unir las articulaciones de la estructura que corresponden a la rodilla y al tobillo. En el extremo superior tiene un eje hueco, para ser acoplado al cuerpo del motor y permitir que el eje inferior de la unión superior de las piernas sea acoplada al motor. En la parte inferior también tiene un pequeño soporte que sirve para anclar el sistema de bloqueo a la estructura (Fig. 6).
DESCRIPCIÓN DEL COMPONENTE UNIÓN SUPERIOR DE LAS PIERNAS
Esta pieza es la encargada de realizar la unión entre el soporte para la pelvis y la unión inferior de las piernas. Consta de un elemento estructural cuadrado con un ángulo y dos ejes en los extremos, el ángulo que posee este componente esta para permitir giros en la cadera en torno al eje del extremo superior de tal forma que se va a tener una rotación relativa entre la unión inferior y la superior lo que va a permitir la flexión y extensión de la rodilla del usuario (Fig. 7).
]]>
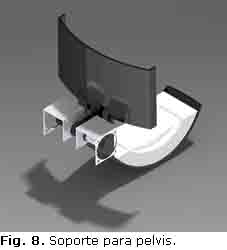
DESCRIPCIÓN DEL COMPONENTE DE SOPORTE PARA LA PELVISA diferencia de los componentes descritos, el material que se selecciona para el componente de soporte es plástico debido a su forma compleja, la cual junto con recubrimientos en espuma en la parte inferior y posterior tienen el propósito de brindar comodidad al usuario. Sin embargo, en la parte posterior del componente hay una unión metálica, de la cual se desprenden dos ejes, uno para realizar el acople con la unión inferior de las piernas y el otro para el acople con el soporte para el pecho. Así mismo estos ejes poseen unas estructuras metálicas para montar el cuerpo de los correspondientes motores, los cuales van a permitir la flexión y extensión de la espalda baja y el giro de la cadera en torno a al eje del acople (Fig. 8).
DESCRIPCIÓN DEL COMPONENTE DE SOPORTE PARA PECHO
Este componente es el encargado de reducir las cargas que produce la parte superior del tronco sobre la espalda baja, está diseñado para realizar el soporte para el pecho de tal forma que no incomode al médico durante el uso de este dispositivo y que a la vez le permita tener la libertad de movimiento que necesita en los miembros superiores.
En cuanto al miembro estructural, posee una forma especial que rodea la cadera y sube por el tronco hasta llegar al pecho, sin limitar u obstruir los posibles movimientos de las extremidades superiores (Fig. 9).
PANEL DE CONTROL
]]> Con las pruebas realizadas en el sistema se encontró que las diversas posiciones que utilizan los médicos durante las intervenciones quirúrgicas suelen hacerse con una inclinación de la columna con respecto a la posición vertical, de 0 a 20 grados. Por lo cual se diseña el dispositivo para adoptar 3 posiciones distintas. Estas posiciones están predeterminadas y son usadas con frecuencia. Las demás posiciones pueden ser programas por los cirujanos, de acuerdo a las necesidades específicas de comodidad durante la intervención quirúrgica (Fig. 10).
Se decide usar un panel de control táctil de 3,2 pulgadas en el cual se programan las diversas posiciones a adoptar. En el momento en que el usuario selecciona una posición, el panel se comunica con el controlador, activa los motores hasta que llegan a la posición deseada. Al llegar a la posición deseada se activa el sistema de bloqueo para al final quedar en la posición, y soportar las cargas del cuerpo del médico cirujano.
CONSIDERACIONES FINALES
La naturaleza del trabajo de los cirujanos aumenta la probabilidad de riesgos de desórdenes músculo esqueléticos, sin embargo el dispositivo diseñado en la presente investigación y su patente, ofrece una solución que puede ser incorporado en su trabajo diario para reducir la problemas de salud asociados a la posturas prolongadas durante la cirugía.10-12
Los síntomas que tienen las personas con trabajos prolongados en posiciones erguidas son inflamación en las articulaciones o los músculos, problemas articulares, problemas circulatorios, poca comodidad y fatiga. El personal médico expuesto a estas posiciones prolongadas tienen con frecuencia asociado lesiones tales como venas varicosas o problemas conocidos como insuficiencia venosa crónica.13-15 Otra condición seria asociada a las prolongas jornadas en posiciones estáticas, son las enfermedades coronarias. Los cirujanos pueden no desarrollar problemas coronarios asociados a sus prolongadas jornadas de pie, pero si tienen un problema coronario existente, este empeorara en función de su actividad.16-18
El diseño en una órtesis para extremidades inferiores con soporte de pecho, representa una alternativa para el personal médico que están por extensos periodos en posiciones incomodas durante el procedimiento quirúrgico.19 La órtesis diseñada y con patente asociada es posicionada en la parte media de las piernas y diseñada para que soporte el peso del cuerpo en los procedimientos quirúrgicos. Este sistema es usado para liberar presión en las rodillas, tobillos y articulaciones de la cadera, así como un medio para evitar tensiones en la espalda.20-22
La presente invención está dirigida a un dispositivo para ser usado en salas de cirugía, tiene un carácter activo, lo que significa que puede ser adaptado de forma dinámica en los momentos de la intervención de cirugía con posiciones predeterminadas, mediante control con circuitos electrónicos.
]]> El dispositivo da soporte a la región pélvica, reduce las cargas soportadas por la espalda baja, y es ajustable a las posiciones programadas con el fin de evitar problemas de salud ocupacional, como venas varice, entre muchos otros problemas de los profesionales que se encuentran sometidos a largos periodos en posición erguida. El dispositivo consta de una estructura mecánica con capacidad de bloquearse y de una estructura electrónica de control. Para el manejo del dispositivo tiene una pantalla táctil que permite el control de las posiciones de acuerdo a la disposición y necesidad del médico.23-25
AGRADECIMIENTOS
La investigación fue realizada en el marco del proyecto ING1775.
REFERENCIAS BIBLIOGRÁFICAS
1. Dollar AM, Herr H. Lower Extremity Exoskeletons and Active Orthoses: Challenges and State-of-the-Art. IEEE Trans. Rob. 2008;24(1):145-51.
2. Baker B. Walk of life. Engineer. 2008;293(7750):30-1.
]]> 3. Matja?i? Z, Olenšek A, Bajd T. Biomechanical characterization and clinical Implications of artificially induced toe-walking: Differences between pure soleus, pure gastrocnemius and combination of soleus and gastrocnemius contractures. Journal of Biomechanics. 2006;39:255-66.4. Walsh CJ. A quasi-passive leg exoskeleton for load-carrying augmentation. Int J Hum Robot. 2007;4(3):487-506.
5. Xie Y, Bai W, Zhang Y. Research on the lower limbs rehabilitative robot. China Medical Device Information. 2010;16(2):5-8.
6. Onishi T, Arai T, Inoue K and Mae Y. Development of the basic structure for an exoskeleton cyborg system. Artif. Life Robot. 2003;7:95-101.
7. Werner C, Frankenberg S, Treig T, Konrad M, Hesse M. Treadmill training with partial body weight support and an electromechanical gait trainer for restoration of gait in subacute stroke patients: a randomized crossover study. Stroke. 2002;33:2895-901.
8. Winter DA. Biomechanics and Motor Control of Human Movement, 2nd ed. John Wiley & Sons; 1990. p. 56-7.
9. Reinkensmeyer DJ, Aoyagi D. Tools for understanding and optimizing robotic gait training. J. Rehabil. Res Dev. 2006;43(5):657-70.
10. Zajac FE, Neptune RR, Kautz SA. Biomechanics and muscle coordination of human walking Part I: Introduction to concepts, power transfer, dynamics and simulations. Gait and Posture. 2002;16(3):215-32.
11. Grace P, Szeto Y, Pei H, Albert CW, Ting JT, Poon C, et al. Work-related Musculoskeletal Symptoms in Surgeons. Journal of Occupational Rehabilitation; 2009.
12. Colombo G, Wirz M, Dietz V. Driven gait orthosis for improvement of locomotor training in paraplegic patients. Spinal Cord. 2001;39(5):252-5.
13. Wu G, Cavanagh R. ISB Recommendation for standardization in the reporting of kinematic data. J. Biomech. 1995;28(10):1257-61.
14. Liu X, Low KH, Yu HY. Development of a lower extremity exoskeleton for human performance enhancement. In: Proc. IEEE/RSJ Int. Conf. Intell. Sendai, Japan: Robots Syst. (IROS); 2004. p. 3889-94.
15. Pratt JE, Krupp BT, Morse CJ, Collins SH. The RoboKnee: An exoskeleton for enhancing strength and endurance during walking. In: Proc. IEEE Int. New Orleans: Conf. Robot. Autom; 2004. p. 2430-5.
16. Sivak-Callcott JA, Sebastian MD, Diaz R, Ducatman AM, Charles MD, Rosen L, et al. A Survey Study of Occupational Pain and Injury in Ophthalmic Plastic Surgeons. Ophthalmological Plastic Reconstruction Surgery. 2011;27(1):28-32.
17. Fleischer C, Reinicke C, Hummel G. Predicting the intended motion with EMG signals for an exoskeleton orthosis controller. In: Proc. IEEE Int. Conf. Robot. Auton. Syst. (IROS); 2005. p. 2029-34.
18. Veneman J. Design and evaluation of the gait rehabilitation robot lopes. PhD Thesis, University of Twente, Enschede. The Netherlands; 2007.
19. Kazerooni H. Exoskeletons for Human Power Augmentation. IEEE/RSJ International Conference on Intelligent Robots and Systems; August 2005.
20. Moisioa KC, Sumnera DR, Shottc S, Hurwitz DE. Normalization of joint moments during gait: a comparison of two techniques. J. Biomech. 2003;36:599-603.
21. K K, Jeon D. Design and control of an exoskeleton for the elderly and patients. IEEE/ASME Trans. Mechatronics. 2006;11(4):428-32.
22. Peshkin M, Brown DA, Santos-Munné JJ, Makhlin A, Lewis E, Colgate JE, et al. KineAssist: A robotic overground gait and balance training device. In: Proc. IEEE Int. Conf. Rehabil. Robot.(ICORR); 2005. p. 241-6.
23. Frey M, Colombo G, Vaglio M, Bucher R, Jorg M, Riener R, et al. A novel mechatronic body weight support system, IEEE Trans. Neural Syst. Rehabil. Eng. 2006;14(3):311-21.
]]>24. Whittle M. Gait Analysis. Elsevier; 2007.
25. Métrailler P, Brodard R, Stauffer Y, Frischknecht R, Clavel R. Cyberthosis: Rehabilitation Robotics with Controlled Electrical Muscle Stimulation. Book: Rehabilitation Robotics. Tech Education and Publishing; 2007.
Recibido: 10 de octubre de 2015.
Aprobado: 10 de noviembre de 2015.
]]> Mauricio Plaza Torres. Universidad Militar Nueva Granada. Bogotá, Colombia.