
Diseño de un Sensor de Flujo Vehicular basado en Lazo Inductivo
Design of a Traffic Flow Sensor based on Inductive Loop
Ing. Ernesto Alpízar Arteaga1, Ing. Arnaldo del Risco Sánchez2
1Centro de investigaciones en Microelectrónica» (CIME), Instituto Superior Politécnico José A. Echeverría (ISPJAE). Kilómetro 8 de la antigua carretera de Vento, email: alpizar@electrica.cujae.edu.cu
2Departamento de Matemática, Facultad de Ingeniería Industrial, Instituto Superior Politécnico José A. Echeverría (ISPJAE), Ciudad Habana, Cuba, email: adrisco@ind.cujae.edu.cu
RESUMEN
Se presenta el diseño de un sensor de Flujo Vehicular de Lazo Inductivo en su variante de detección basada en frecuencímetro, se describe el proceso de diseño fundamentado en la explicación de cada una de sus componentes desde el transductor hasta el algoritmo de detección, para la simulación se utiliza el programa MATLAB 9 y para la comprobación se presentan resultados obtenidos al utilizar la propuesta de sensor en la vía.
Palabras claves: flujo vehicular, lazo inductivo.
ABSTRACT
The design of a sensor of Traffic Flow based on Inductive Loop is presented in its detection variant based on frequency meter, the design process is described based in the explanation of each one of its components from the transducer until the detection algorithm, for the simulation the program MATLAB 9 is used and for the confirmation results are presented obtained when using the sensor proposal in the road.
Key words: traffic flow, inductive loop.
]]> INTRODUCCION
En la actualidad tanto en nuestro país como en el mundo, debido al desarrollo de las comunicaciones, el comercio y la industria, el número de vehículos y la necesidad de transportarse crece rápidamente. Sin embargo, la construcción de nuevas carreteras ya no es una opción viable debido a los altos costos económicos y ambientales, así como las restricciones por las limitaciones geográficas [1].
El control del tráfico vehicular, ya sea en las vías urbanas como en las carreteras, constituye una de las actividades principales para el ordenamiento del tráfico con diversas finalidades que benefician a los residentes de grandes comunidades. La implementación de estos sistemas de control comienza a ser utilizados, principalmente, como medida preventiva en la reducción de accidentes viales [2].
Tradicionalmente, la teoría del flujo de tráfico, o del flujo vehicular, ha sido ampliamente investigada, la cual consiste básicamente en disminuir el tiempo de viaje de los conductores con un índice de accidentalidad lo menor posible [1].
A través del análisis de los elementos del flujo vehicular (F.V.) se pueden comprender las características y el comportamiento del tránsito, requisitos básicos para el planeamiento, organización, proyecto, operación de viales en general (calles, carreteras y obras complementarias) y el control de las mismas.
Uno de los resultados más importantes del análisis del F.V. es el desarrollo de modelos que relacionan sus diferentes variables como: volumen, velocidad, la densidad, el intervalo y el espaciamiento. Lo que constituye un aspecto muy importante en las alternativas de diseño del control de tráfico vehicular [1].
Un sistema de detección de vehículos se define como «un sistema para la indicación de la presencia o el paso de vehículos»1, este provee datos para sistemas de control de flujo vehicular, supervisión de autopistas, gestión del tráfico, sistemas de recolección de datos y sistemas de información al viajero. Los sensores de flujo vehicular pueden ser clasificados según su instalación en dos grupos, sensores instalados en la vía o sensores instalados fuera de la vía.
De los sensores instalados en la vía se tiene:
Detector por Lazo Inductivo
]]> MagnetómetrosDetector por Fibra Óptica
De los sensores instalados fuera de la vía se tiene:
Procesamiento de Imágenes por Cámaras
Radar de Microondas
Radar Laser
Infrarrojos Pasivos
Ultrasónicos
Acústico Pasivo
El uso de los sensores de flujo vehicular maximiza la eficiencia y capacidad de las redes de transporte lo cual es una alternativa para evitar la construcción de nuevas vías al utilizarse en un Sistema Inteligente de Transporte el cual se encarga de disminuir el tiempo de viaje y las congestiones, mejora la seguridad y reduce la emisión de gases al medio ambiente.
]]>DISEÑO DEL SENSOR BASADO EN LAZO INDUCTIVO
Un Sensor de Flujo Vehicular de Lazo Inductivo se basa en el fenómeno físico de la Inducción Electromagnética, se compone de una o mas vueltas de un cable aislado insertado en el pavimento. Cuando un vehículo lo atraviesa o se detiene encima de este, se inducen corrientes en el vehículo y disminuye la inductancia del lazo, esto trae como consecuencia el desbalance del circuito del cual este inductor es parte. Su principal ventaja viene dada por la gran experiencia acumulada en el trabajo con él, es insensible a inclemencias del tiempo y ofrece una buena exactitud para el conteo de vehículos [3]. El objetivo es medir de alguna manera la diferencia de inductancia que aparece cuando un vehículo cruza el lazo, para cumplirlo se propone un oscilador tipo LC en donde al variar la inductancia se modifica la frecuencia de oscilación, el período de la oscilación es medido por un microcontrolador el cual posee un algoritmo para la detección de los vehículos basado en la diferencia de período.
El Sensor basado en Lazo Inductivo dispone de tres componentes fundamentales: el lazo o inductor, el oscilador y el frecuencímetro. Su funcionamiento vine dado, en que al ser parte el inductor de un circuito oscilador, cualquier cambio en la inductancia de este genera un cambio en la frecuencia de oscilación la cual es medida y utilizada como criterio para detectar el cruce de un vehículo por encima del inductor. En la figura 1 se muestra el diagrama en bloques general del Detector basado en Lazo Inductivo.
DISEÑO DEL INDUCTOR
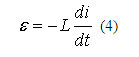
Al variar la corriente por un conductor el flujo magnético ![]() varía también y aparece una fuerza electromotriz (f.e.m.) inducida que se opone a esta variación, este fenómeno se conoce como autoinducción al cual se le asocia una constante
varía también y aparece una fuerza electromotriz (f.e.m.) inducida que se opone a esta variación, este fenómeno se conoce como autoinducción al cual se le asocia una constante ![]() , llamada inductancia. La ley de Faraday-Henry plantea que:
, llamada inductancia. La ley de Faraday-Henry plantea que:
 conociendo que el flujo magnético depende del campo magnético que atraviesa la superficie del inductor y se expresa como
conociendo que el flujo magnético depende del campo magnético que atraviesa la superficie del inductor y se expresa como
 se tiene que:
se tiene que:
 al extraer los términos constantes se obtiene la expresión
al extraer los términos constantes se obtiene la expresión
La ecuación 4 describe el fenómeno expuesto anteriormente, donde L depende del área de la región, de la permeabilidad magnética del vacío (µ0), de la permeabilidad magnética del medio (µr), de la longitud del inductor (l) y del número total de espiras (N) y del área del inductor (A). Para el cálculo de la inductancia del lazo se utiliza la siguiente expresión ![]() donde P es el perímetro del lazo. Se debe destacar que el diseño del inductor no es un punto crítico en el sistema, pues la unidad detectora admite valores de frecuencia en reposo variables en un rango entre 20 y 100 kHz, es posible diseñar el inductor teniendo en cuenta el valor aproximado de su inductancia y luego medir el valor exacto utilizando un instrumento de medición o ver la frecuencia que genera este en el oscilador. Además de la inductancia del lazo se debe tener en cuenta la inductancia del cable que conecta el oscilador con el lazo, esta inductancia adicional disminuye la sensibilidad del lazo.
donde P es el perímetro del lazo. Se debe destacar que el diseño del inductor no es un punto crítico en el sistema, pues la unidad detectora admite valores de frecuencia en reposo variables en un rango entre 20 y 100 kHz, es posible diseñar el inductor teniendo en cuenta el valor aproximado de su inductancia y luego medir el valor exacto utilizando un instrumento de medición o ver la frecuencia que genera este en el oscilador. Además de la inductancia del lazo se debe tener en cuenta la inductancia del cable que conecta el oscilador con el lazo, esta inductancia adicional disminuye la sensibilidad del lazo.
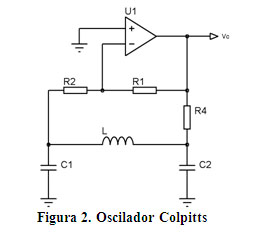
DISEÑO DEL OSCILADOR
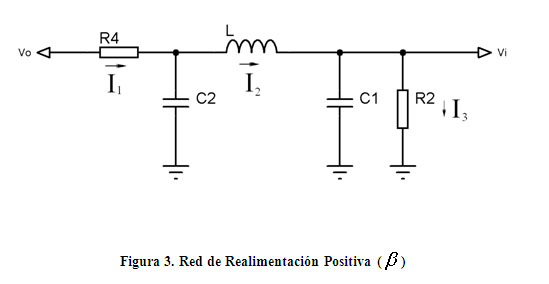
]]>Según el principio de funcionamiento del Sensor Basado en Lazo Inductivo se necesita un oscilador que su frecuencia de oscilación sea función de la inductancia, es decir tipo LC, en la figura 2 se observa el oscilador propuesto tipo Colpitts y la figura 3 muestra su red de realimentación positiva.
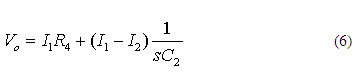
De la red de realimentación positiva se extraen las ecuaciones (6) (7) (8) (9).
]]>

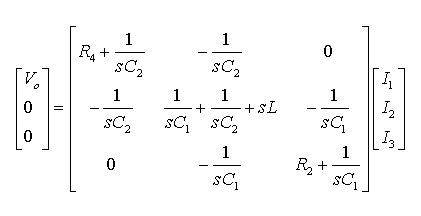
En forma matricial:
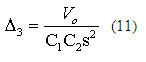
Utilizando el método de Cramer le damos solución al sistema de ecuaciones para hallar![]()

tilizando el determinante, expresión (10), y el determinante característico de I3, ecuación (11), se obtiene ![]()
![]()
Al sustituir la variable ![]() por
por ![]() e igualando la parte imaginaria de la función de transferencia
e igualando la parte imaginaria de la función de transferencia ![]() a cero, obtenemos la ecuación de la frecuencia de oscilación.
a cero, obtenemos la ecuación de la frecuencia de oscilación.
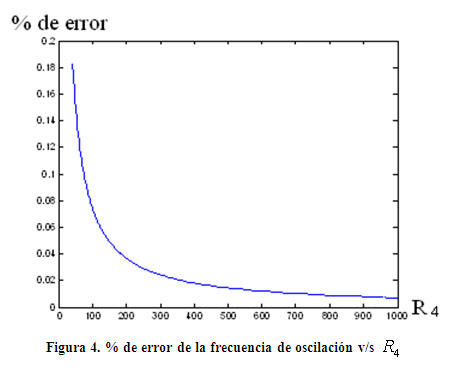
Como se observa en la gráfica de la figura 4, generada en MATLAB, la cual es el por ciento de error de la aproximación, al utilizar un valor de ![]() grande los valores obtenidos mediante la expresión (13) se aproximan a los valores derivados de la expresión (14), como conclusión parcial se puede observar que el valor de
grande los valores obtenidos mediante la expresión (13) se aproximan a los valores derivados de la expresión (14), como conclusión parcial se puede observar que el valor de ![]() es utilizado para mejorar la exactitud de la aproximación.
es utilizado para mejorar la exactitud de la aproximación.
Para la condición de oscilación se sustituye ![]() por
por ![]() , se multiplica la red
, se multiplica la red ![]() por la ganancia del amplificador
por la ganancia del amplificador  y se iguala la parte real a 1.
y se iguala la parte real a 1.
]]> resolviendo (15)
Esto significa que para mantener las oscilaciones, el valor absoluto de la ganancia debe cumplir que  (16) para que las oscilaciones no se amortigüen.
(16) para que las oscilaciones no se amortigüen.
Un aspecto importante del diseño es su sensibilidad, la que se define como el menor valor ![]() que puede detectar la unidad electrónica. Este valor depende de la geometría del vehículo que lo cruce, pues mientras más se asemejen las dimensiones del lazo y del auto, mayor serán las corrientes que se inducen en este. Igual efecto tiene la distancia del vehículo al lazo pues, a menor distancia mayor será el flujo magnético que lo cruza.
que puede detectar la unidad electrónica. Este valor depende de la geometría del vehículo que lo cruce, pues mientras más se asemejen las dimensiones del lazo y del auto, mayor serán las corrientes que se inducen en este. Igual efecto tiene la distancia del vehículo al lazo pues, a menor distancia mayor será el flujo magnético que lo cruza.
Basado en la variación de la inductancia se halla la variación de frecuencia del siguiente modo:
![]()
 , este valor se puede aproximar utilizando diferenciales.
, este valor se puede aproximar utilizando diferenciales.
]]>

DISEÑO DEL DETECTOR
El Detector se implementa en un microcontrolador de la familia PIC18F4550 y su algoritmo de detección se muestra en la figura 5, este se basa en ir almacenando los valores de diferencia de frecuencia y compararlo con cierto umbral para tomar decisiones de vehículo entrando, vehículo adentro o vehículo saliendo.
SIMULACIÓN
La simulación del oscilador se realiza en MATLAB 9 y tiene como objetivo comprobar los resultados teóricos planteados anteriormente, se utiliza el siguiente juego de valores:
]]> Lazo Inductivo: 89 µHC1=160 nF
C2=137 nF
R4=R2=2 k&!
El primer paso para comenzar la simulación es calcular el valor de R1 que cumpla la condición de oscilación de la ecuación 16 se obtiene que  y su valor es de 4.0483 kΩ.
y su valor es de 4.0483 kΩ.
Se obtiene la expresión de la red β como sigue:  y la ganancia del amplificador básico A=-2.0241.
y la ganancia del amplificador básico A=-2.0241.
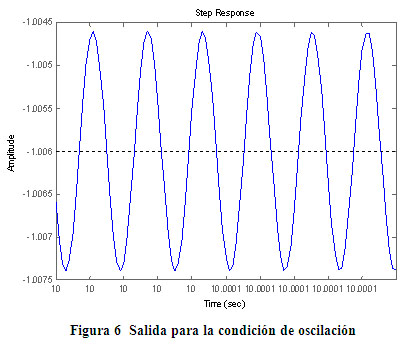
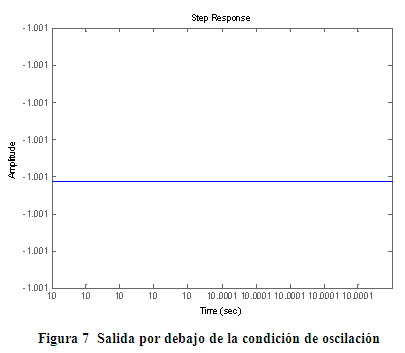
Para simular el circuito se realiza la realimentación positiva entre la funciones de transferencia A y β. Luego se obtiene su respuesta temporal a un paso escalón. En la figura 6 se muestra la salida del oscilador para R1= 4.0483 kΩ, comprobándose la condición de oscilación. La figura 7 muestra la simulación para una resistencia un 1% por debajo del valor límite para la oscilación en donde se observa que al estar por debajo de la condición de oscilación el circuito deja de oscilar. La figura 8 muestra la simulación para una resistencia un 1% por encima de la condición de oscilación, en donde se observa que el circuito continúa oscilando con una amplitud muy grande (infinito), se debe tener en cuenta que este valor de infinito es teórico pues en la práctica el amplificador satura la salida. En las figuras 7 y figura 8 se comprueba la frecuencia de oscilación la cual coincide con el valor de la expresión 14.
]]>
COMPROBACIÓN PRÁCTICA
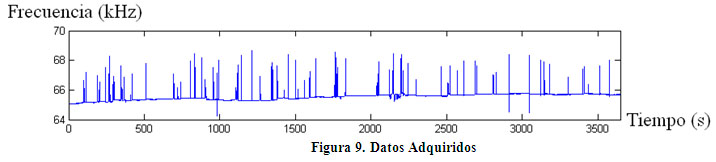
Para comprobar el diseño se implementó un experimento en la entrada principal de la CUJAE, para verificar que se detectaran los vehículos que por allí transitaran; utilizando un lazo inductivo de 89 µH, capacitores en el oscilador de 160nF y 137nF. En la figura 9 se muestra la gráfica de frecuencia en el tiempo del sensor implementado, en donde los picos que se observan se deben al cruce de un vehículo por encima del lazo.
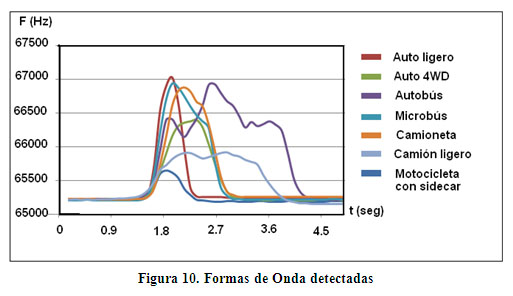
Para este experimento se obtuvieron las formas de onda mostradas en la figura 10 para algunos vehículos que cruzaron el lazo durante el experimento.
]]>Se simuló en MATLAB un algoritmo de detección, basado en la búsqueda de los valores máximos utilizando las derivadas de primer y segundo orden de la frecuencia con respecto al tiempo. Cuando la derivada se hace cero hay un punto de extremo local, la condición suficiente la impone la segunda derivada, pues si su valor es negativo en el punto la gráfica es cóncava y por lo tanto es un máximo. En la figura 11 se muestra una porción de las gráficas.
La subgráfica 1 (en rojo) muestra la variación con respecto al tiempo de la frecuencia. Nótese que la primera distorsión presenta un cruce por cero lo que equivale a un extremo, en el caso de la segunda distorsión muestra seis cruces por cero lo que equivale a seis extremos de los cuales según la subgráfica 2(en verde) cuatro son máximos y dos son mínimos. En este momento se puede determinar el máximo absoluto, hallando el mayor de los extremos locales, el cual se corresponde con el vehículo que cruza el lazo.
CONCLUSIONES
Se ha diseñado un inductor en forma de bobina cuadrada utilizando una expresión aproximada la cual ofrece una buena exactitud para el diseño del sistema de detección.
Se hallaron las expresiones que rigen el comportamiento del oscilador con el objetivo de caracterizar su frecuencia de oscilación y su amplitud, encontrándose las condiciones para el cual este circuito se mantiene entregando una salida sinodal.
Se presentó un algoritmo de detección basado en la diferencia de frecuencia para ser implementado en un microcontrolador de la familia PIC 18.
En la simulación se comprobaron las ecuaciones que rigen el comportamiento del oscilador, para distintos valores de la condición de oscilación, y se diseñó un algoritmo de detección en MATLAB.
]]> Se comprobó experimentalmente el diseño propuesto al ubicar el sensor basado en lazo inductivo en la vía.
REFERENCIAS
1. Llamas V. Paul, Luis F. Galván, «Estado del Arte. Sistema Inteligente para el Control de Tráfico Vehicular», Seminario de Investigación, Facultad de Telemática, Universidad de Colima, Méjico; 2010.
2. Enciso Gustavo A., «Diseño de Sistema de Control Adaptativo y justo del Tráfico Vehicular en Encrucijadas mediante la utilización de Autómatas Programables», Departamento de Mecánica, Facultad Ingeniería UNNE, Argentina, 2001.
3. «Traffic Detector Handbook», Third Edition Volume I, US Department of Transportation, octubre 2006.
4. «PIC18F2455/2550/4455/4550 Data Sheet»; Microchip Technology Inc; 2007.
Recibido: Noviembre 2011
Aprobado: Febrero 2012
]]>


{kind=link}