Identificación de un vehículo aéreo no tripulado
Identification of an unmanned aerial vehicle
Dr. Boris L. Martínez-Jiménez, MSc. Luis M. Pineda-Bombino, Ing. Miguel E. Martínez-Carmenate, MSc. Diamir De-Ávila-Rodríguez, Dr.Luis Hernández-Santana
Dpto. de Automática y Sistemas Computacionales, Facultad de Ingeniería Eléctrica, Universidad Central «Marta Abreu» de Las Villas, Santa Clara. Villa Clara. Cuba. Teléfono: (53) (42) 281055, boris@uclv.edu.cu , luis_mariano@uclv.edu.cu , diamir@uclv.edu.cu , luishs@uclv.edu.cu
]]>
RESUMEN
El desarrollo de los vehículos aéreos ha influido considerablemente en la vida del hombre. Una tendencia actual es la investigación y desarrollo de vehículos aéreos no tripulados (Unmanned Aerial Vehicles, UAV), pues estos brindan grandes ventajas en disímiles tareas como el acceso a lugares remotos, reconocimiento, supervisión y vigilancia. Durante la confección de un autopiloto para estos vehículos, la obtención del modelo matemático es una tarea primordial, pues se requiere representar fielmente la dinámica del UAV para realizar un control eficiente sobre el mismo. Aunque se realizan muchos trabajos relacionados con el modelado analítico de los aviones no tripulados, la identificación del modelo a partir de datos es un método muy utilizado debido a que es muy difícil tener en consideración todas las interacciones y fenómenos físicos presentes en estos sistemas. En este trabajo se presenta diferentes modelos dinámicos de un avión autónomo de pequeño porte obtenidos aplicando varias técnicas de modelado e identificación de sistemas. En específico, se obtienen cuatro modelos con diferentes características: un modelo analítico, un modelo obtenido mediante una técnica de identificación clásica, un modelo nuero-borroso y un modelo borroso evolutivo. Finalmente, se expresan los resultados de los distintos modelos así como consideraciones sobre las utilidades de los mismos.
Palabras Clave: vehículo aéreo no tripulado, modelado dinámico, sistemas adaptables, sistemas borrosos.
ABSTRACT
The aerial vehicles development has significantly influenced in human life. The research and development of Unmanned Aerial Vehicles (UAVs) is a current trend, due to they offer great advantages in dissimilar tasks such as remote access, reconnaissance, surveillance and monitoring. During autopilot construction for these vehicles, to obtain a mathematical model is a primary task, because it is required to accurately represent the UAV's dynamics to perform an efficient control over it. Although many works related to analytical modeling of unmanned aircraft are doing, model identification from data is a widely used method because it is very difficult to take into account all interactions and physical phenomena present in these systems. In this paper, dynamic models of a small-sized autonomous plane obtained by applying various techniques of modeling and system identification are presented. Specifically, four models with different features are obtained: an analytical model, a model obtained by classical identification technique, a nuero-fuzzy model and an evolving fuzzy model. Finally, comparison results among obtained models are expressed as well as profit considerations about them.
Key words: unmanned aerial Vehicle (UAV), dynamic modeling, adaptive systems, fuzzy systems.
INTRODUCCIÓN
]]>El vertiginoso desarrollo de los vehículos aéreos ha condicionado la vida del hombre en los últimos años. La masificación de este medio de transporte o entretenimiento, arma de combate y plataforma de investigación, ha sido crucial en el desarrollo histórico y científico de la sociedad 1. Una de las tendencias de desarrollo más reciente considera las investigaciones sobre los vehículos aéreos no tripulados (Unmanned Aerial Vehicles, UAV). Estos gozan en la actualidad de gran popularidad y aceptación a nivel mundial debido a las ventajas que brindan para el cumplimiento de misiones en lugares de difícil acceso, de reconocimiento, supervisión y vigilancia. Los UAV pueden usarse desde importantes aplicaciones civiles como son las de rescate y salvamento, estudio de ecosistemas, supervisión de líneas eléctricas, oleoductos, hasta aplicaciones en el campo militar, ya sea para tareas de supervisión y espionaje o como portadores de armas de combate.
Por lo anteriormente planteado es que muchas instituciones, centros de investigación y varias universidades en todo el mundo realizan proyectos e investigaciones para el desarrollo de pequeños aviones autónomos 2 3 4 5 6. En Cuba su desarrollo aún es escaso, pero instituciones como GEOCUBA, quien elabora mapas de relieve; CEMPALAB, investigadora de agricultura de precisión; y CEDAI, han mostrado interés en las ventajas que los pequeños aviones no tripulados pueden brindar. Por tal razón, el Grupo de Automática Robótica y Percepción (GARP) de la UCLV, tiene como proyecto el desarrollo de un autopiloto para un avión de pequeño porte 7 8.
Los UAV pueden estar controlados por una estación a bordo que realiza toda la toma de decisiones de forma automática o por operadores que con el uso de un radio control pueden realizar acciones de forma manual como son el despegue y el aterrizaje. La estructura del sistema propuesta por el grupo de investigación GARP es el resultado de un estudio bibliográfico previo de los principales desarrollos en el campo a nivel mundial, y a un conocimiento de los principales componentes que los conforman, tales como los sensores, actuadores y elementos de comunicación, y a un desarrollo previo en arquitecturas con dSPIC como sistema de cómputo.
La obtención del modelo matemático es una de las tareas más importantes y exigentes para la creación de un autopiloto, pues si éste no representa fielmente a la dinámica de la planta entonces el control sobre ella se realizará de forma deficiente. Existen dos formas de obtener el modelo dinámico, analíticamente o experimentalmente. El modelado analítico o matemático se realiza mediante un proceso basado en las ecuaciones no lineales de fuerza y torques que actúan en el avión. Generalmente, dichas ecuaciones son linealizadas empleando la serie de Taylor.
Por otro lado, en la identificación experimental se emplean datos recolectados en experimentos reales para sintetizar los modelos matemáticos. En los UAV este método es muy utilizado debido a las complejidades inherentes a estas plantas y a que es muy difícil tomar en consideración todas las interacciones y fenómenos físicos presentes. Las soluciones más frecuentes emplean métodos clásicos de identificación 3 7 9, aunque recientemente se aprecia la tendencia del empleo de técnicas de identificación no lineales. Dentro de los métodos de identificación no lineales, el modelado borroso ofrece una forma estructurada de formulación del conocimiento, capaz de proporcionarlo a partir de datos o de incorporarlo a partir de expertos. Otra propiedad importante de los modelos borrosos es su capacidad de representar sistemas no lineales continuos. Por tanto, se deriva que es provechosa su aplicación a plantas no lineales y difíciles de modelar como es el sistema que nos ocupa 10 11 12.
Con la ayuda del MatLab, en esta investigación, se obtienen modelos matemáticos de un avión de pequeño porte empleando métodos de modelado analítico, métodos de identificación de sistemas lineales y métodos de modelado con sistemas inteligentes, específicamente, empleando sistemas borrosos dinámicos. Dichos modelos resultantes son verificados y comparados entre sí.
El trabajo se organiza de la siguiente forma. En la sección 2 se describe los métodos empleados tanto en el modelado analítico como en la identificación de sistemas. En la sección 3 se analizan las características y los resultados de estimación de cada modelo y en la sección 4 se presentan las conclusiones.
METODOLOGÍA
]]> MODELADO ANALÍTICO
La obtención de un modelo matemático que describa lo más fielmente posible la dinámica de la planta a controlar es fundamental para la calidad y exactitud de cualquier sistema de control. En los aviones adquiere especial importancia debido a lo compleja que resulta la dinámica de los mismos y la necesidad de su conocimiento detallado para sintetizar una estrategia de control adecuada.
La dinámica de un avión de pequeño porte se divide en movimiento longitudinal y movimiento lateral. Estos movimientos se asumen desacoplados reduciendo considerablemente la complejidad del modelo 3 13. La obtención del mismo se realiza mediante un proceso de modelado basado en las ecuaciones no lineales de fuerza y torques que actúan en el avión, linealizadas a través de la serie de Taylor 7. Este proceso se dificulta en extremo en esta investigación por la falta de costosos medios apropiados para obtener todos los parámetros influyentes en el modelo analítico.
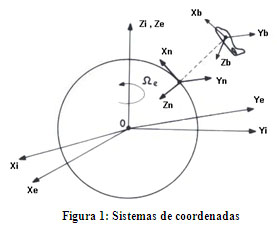
Para obtener el modelo de un avión se usan cinco sistemas de coordenadas (Figura. 1), un análisis detallado de estos sistemas de coordenadas lo podemos encontrar en 13.
Dichos sistemas son:
· Referencia tierra Xe Ye Ze.
· Sistema de coordenadas inercial Xi Yi Zi.
]]> · Sistemas de Coordenadas de Navegación Xn Yn Zn.· Sistemas de ejes del cuerpo Xb Yb Zb.
· Sistema de Estabilidad Xs Ys Zs.
Un conocimiento profundo acerca de los ángulos de movimiento del avión también es necesario. La definición de ángulos utilizada aquí coincide con lo planteado en el artículo «Autonomous Model Airplane» 3.
El ángulo de ataque ![]() es un importante parámetro de estabilidad en el plano vertical, y define el ángulo entre el vector de velocidad crucero
es un importante parámetro de estabilidad en el plano vertical, y define el ángulo entre el vector de velocidad crucero ![]() y el eje de estabilidad
y el eje de estabilidad ![]() , que coincide con
, que coincide con ![]() . El ángulo de cabeceo
. El ángulo de cabeceo ![]() es usado para describir la orientación del avión respecto al plano horizontal, su definición es el que está entre el plano horizontal y el vector velocidad
es usado para describir la orientación del avión respecto al plano horizontal, su definición es el que está entre el plano horizontal y el vector velocidad ![]() .
.
Los ángulos de deriva ![]() y guiñado
y guiñado ![]() son dos importantes ángulos de estabilidad en el plano horizontal. El ángulo de deriva se define como el ángulo entre la velocidad delantera y el plano simétrico del avión. El ángulo de guiñado se define como el ángulo entre el plano de referencia y el plano simétrico del avión. El plano de referencia coincide con el sistema de coordenadas de navegación y coincide con el plano simétrico del avión a vuelo en estado estable (es decir, sin ningún tipo de disturbio). Mientras tanto, el ángulo de alabeo se define como el cambio en el ángulo de rotación en el eje longitudinal.
son dos importantes ángulos de estabilidad en el plano horizontal. El ángulo de deriva se define como el ángulo entre la velocidad delantera y el plano simétrico del avión. El ángulo de guiñado se define como el ángulo entre el plano de referencia y el plano simétrico del avión. El plano de referencia coincide con el sistema de coordenadas de navegación y coincide con el plano simétrico del avión a vuelo en estado estable (es decir, sin ningún tipo de disturbio). Mientras tanto, el ángulo de alabeo se define como el cambio en el ángulo de rotación en el eje longitudinal.
El modelo del avión tiene seis grados de libertad divididos en las ecuaciones de fuerza y los momentos angulares. En el modelado se emplean otras dos aproximaciones: el avión es simétrico en el plano y el sistema de ejes del cuerpo tienen su origen en el centro de gravedad del avión, y su orientación hacia el frente del avión.
La ecuación de fuerza se deriva de la segunda Ley de Newton y usando el teorema de transportación se obtiene la siguiente ecuación: (1)
]]> La acción de los torques externos en el avión en el marco coordenado del cuerpo se puede expresar en el marco coordenado de navegación como:
![]()
La linealización de las ecuaciones se realiza con el uso de las series de Taylor y se expanden estas ecuaciones. Las fuerzas y los torques se linealizan separados, lo que permite buscar un valor deseado (set point) definitivo para el vuelo estable. Este valor deseado se obtiene haciendo todas las variables iguales a cero, excepto![]() , que es la velocidad inicial y es estable 7.
, que es la velocidad inicial y es estable 7.
Para el modelado y control, los movimientos longitudinal y lateral se asumen desacoplados, lo cual reduce considerablemente la complejidad del modelo 3 13.
El modelo longitudinal del avión en espacio de estado se representa de la siguiente forma:(3)
En la ecuación anterior, el vector de los estados longitudinales ![]() y el vector de entrada
y el vector de entrada ![]() se definen como:
se definen como:

donde es la velocidad frontal ![]() , es el ángulo de ataque,
, es el ángulo de ataque, ![]() es la velocidad angular de cabeceo,
es la velocidad angular de cabeceo, ![]() es el ángulo de cabeceo,
es el ángulo de cabeceo, ![]() es la deflexión en el elevador y
es la deflexión en el elevador y ![]() es la señal de control en el motor.
es la señal de control en el motor.
De manera similar se representa el modelo lateral del avión en espacio de estado:
![]()
Aquí, el vector de estado ![]() y el vector de entrada
y el vector de entrada ![]() se definen de la siguiente forma:
se definen de la siguiente forma:

donde ![]() es el ángulo de deriva,
es el ángulo de deriva, ![]() el ángulo de alabeo,
el ángulo de alabeo, ![]() es la velocidad angular en el alabeo,
es la velocidad angular en el alabeo, ![]() es el ángulo de guiñado,
es el ángulo de guiñado, ![]() es la velocidad angular en el guiñado,
es la velocidad angular en el guiñado, ![]() es la deflexión en el alerón y
es la deflexión en el alerón y ![]() es la deflexión en el timón.
es la deflexión en el timón.
IDENTIFICACIÓN EXPERIMENTAL
Para la identificación de sistemas se utilizan datos experimentales de entrada-salida tomados de la propia planta para obtener una representación matemática de la dinámica del sistema. Este método es muy utilizado porque es directo, basado en datos reales y permite la validación y el refinamiento del modelo durante el proceso de modelado 8 9 14.
Para realizar la identificación se lleva a cabo el experimento en pleno vuelo. Dicho experimento se diseña para excitar los controles del avión de forma natural, aunque el diseño descansa en un conocimiento previo de la dinámica del avión. Durante el experimento se transmite al avión una señal de mando aleatoria registrándose los cambios provocados. Para que la identificación del sistema sea exitosa es necesario que las entradas al sistema durante la recogida de datos exciten en el sistema las frecuencias deseadas. Esto se puede alcanzar provocando pequeños cambios de altura y de giros en el avión durante el vuelo.
Los datos resultantes se almacenan en tierra y se procesan para ser utilizados para la identificación. Para hacer esto posible es necesario que el hardware esté probado y que el avión esté equipado con todo el hardware necesario. El programa para la recolección de los datos también tiene que ser probado e instalado.
Como parte de esta investigación se realizó un experimento como el descrito anteriormente. El hardware utilizado posee un microprocesador DSPIC30F4013 y el elemento de medición a bordo del avión es una Unidad de Medida Inercial (IMU), utilizando específicamente una MTI 8.
MODELOS LINEALES
]]> Para el modelado de los movimientos longitudinal y lateral del UAV se asume que estos están desacoplados, como se mencionó anteriormente. En el modelo longitudinal, las salidas a tener en cuenta son la variación del ángulo de cabeceo (pitch) y su razón de cambio (pitch rate), y la entrada es la variación del elevador. En el caso del modelo lateral se consideran dos entradas: variaciones en el timón de cola y variaciones en los alerones. Las salidas de interés aquí son los ángulos de alabeo (roll) y guiñada (yaw).
MODELADO BORROSO TAKAGI-SUGENO
El sistema borroso utilizado es el conocido sistema de inferencia TakagiSugeno. Dicho sistema está compuesto por ![]() reglas borrosas de la siguiente forma:
reglas borrosas de la siguiente forma:
![]()
donde ![]() ,
, ![]() son las variables de entrada definidas en los universos de iscurso
son las variables de entrada definidas en los universos de iscurso ![]() son los conjuntos borrosos definidos por sus funciones de pertenencia
son los conjuntos borrosos definidos por sus funciones de pertenencia ![]() . En la parte del consecuente,
. En la parte del consecuente, ![]() es la salida de la regla
es la salida de la regla ![]() y
y ![]() son escalares.
son escalares.
La salida del sistema, es el promedio ponderado de la salida de cada regla como se indica a continuación:
]]>
donde ![]() es el nivel de impacto de la regla
es el nivel de impacto de la regla ![]() .
.
Finalmente, todas las funciones de pertenencia utilizadas son del tipo gaussianas:
donde: ![]() es el centro de la clase en la dimensión
es el centro de la clase en la dimensión ![]() y
y ![]() es proporcional al radio de atracción de dicha clase.
es proporcional al radio de atracción de dicha clase.
ANFIS
]]> La arquitectura ANFIS (Adaptive Neural Fuzzy Inference Systems) 15 es un ejemplo de sistema neuro-borroso ampliamente utilizado para ajustar los parámetros de un sistema borroso a partir de datos de entrada-salida. Funcionalmente equivalente a un sistema borroso donde el proceso de inferencia se implementa como una red neuronal que ajusta por medio del gradiente descendente los parámetros del antecedente y mediante algoritmos de mínimos cuadrados los parámetros del consecuente de cada regla.
ANFIS es un sistema neuro-borroso que combina las ventajas de ambos sistemas. Como un sistema borroso, no requiere un gran conjunto de datos y proporciona transparencia, suavidad y representación del conocimiento previo. Como una red neuronal, proporciona adaptabilidad paramétrica. Además, se ha demostrado que esta arquitectura es un aproximador universal 16
EFIS
En este proceso de identificación se emplea un modelo borroso evolutivo 17 18 propuesto en 19, el cual proporciona adaptación en línea del modelo con reducción del costo computacional. El algoritmo de aprendizaje consta de dos pasos. El primero es la identificación de la base de reglas, donde se divide el espacio de los datos utilizando el método de agrupamiento en línea EACM 19 y se proyectan las clases para obtener el antecedente de las reglas. El segundo paso consiste en la identificación de los parámetros del consecuente utilizando algoritmos de mínimos cuadrados.
En la identificación en línea, continuamente arriban nuevos datos y las clases deberán cambiar de acuerdo a estos nuevos datos. Si el dato no pertenece a una clase existente, una nueva es creada. Si el nuevo dato está muy cercano a una clase existente, dicha clase es actualizada. Una nueva regla es generada solo si hay información significativa presente en los datos. Para esto se considera el peso de la clase (Wi), el cual está dado por la cantidad de datos que pertenecen a la misma. El procedimiento empleado verifica si el valor del peso es apreciable (Wi > å) antes de generar una nueva regla. Una vez realizada la identificación de la estructura, los resultados del agrupamiento en línea son utilizados para ajustar los centros y anchos de las funciones de pertenencia según (9).
Para crear y actualizar las funciones lineales de los consecuentes, se utilizan estimadores de mínimos cuadrados. Para ello se forma una matriz de composición X', conformada a partir de los niveles de impacto normalizados y del conjunto de m datos iniciales del proceso:
La expresión
es utilizada para obtener la matriz inicial de los parámetros del consecuente a = [a0T a2T … aKT]T .
Nótese que (10) se puede reescribir como:
Para la actualización de la matriz de parámetros a, se utiliza un estimador de mínimos cuadrados recursivos (RLS) con un factor de olvido. Sea ![]() el k-ésimo vector fila de
el k-ésimo vector fila de ![]() y y(k) el k-ésimo elemento del vector de salida Y, entonces a puede calcularse iterativamente por:
y y(k) el k-ésimo elemento del vector de salida Y, entonces a puede calcularse iterativamente por:
donde ![]() es un factor de olvido constante, con valores típicos entre 0.8 y 1, introducido para posibilitar un mejor seguimiento a sistemas variantes en el tiempo. Los valores iniciales, P(0) y a(0), son calculados utilizando (11).
es un factor de olvido constante, con valores típicos entre 0.8 y 1, introducido para posibilitar un mejor seguimiento a sistemas variantes en el tiempo. Los valores iniciales, P(0) y a(0), son calculados utilizando (11).
El procedimiento recursivo para la actualización en línea de modelos borrosos TS evolutivos utilizado en este trabajo, se expresa en los siguientes pasos:
]]>ALGORITMO DE APRENDIZAJE
1. Inicializar el modelo borroso. Para ello:
(a) Tomar los primeros m datos del conjunto de datos
(b) Aplicar método de agrupamiento EACM.
(c) Obtener una regla borrosa por cada clase con información significativa; creando el antecedente de cada regla con (9) y utilizar (11) para obtener los valores iniciales de P y a.
2. Tomar el próximo dato
3. Actualizar recursivamente los centros de agrupamiento utilizando el algoritmo EACM
4. Posible modificación de la base de reglas. Una nueva regla borrosa es creada si hay información significativa presente en la nueva clase creada por EACM, para ello:
]]> SI el peso de la clase no es despreciable (Wj>å),ENTONCES una nueva regla es creada.
5. Actualizar los antecedentes mediante (9)
6. Calcular recursivamente los parámetros de los consecuentes mediante (12)
7. Predecir la salida del próximo instante de tiempo mediante el modelo borroso TS
La ejecución del algoritmo continúa en el próximo instante de tiempo desde el paso 2.
MODELOS DEL UAV
MODELO ANALÍTICO EN ESPACIO DE ESTADO
]]> En el trabajo «Modelo matemático de un avión autónomo» 7, apoyado en el libro «Performance, Stability, Dynamics and Control of Airplanes» 13, se desarrolla un programa con el cual se calculan, para este tipo de aviones, los parámetros del modelo. Con dichos resultados y basados en trabajos realizados para aviones similares 3 20, se obtienen las representaciones del modelo longitudinal y el modelo lateral de la siguiente forma:
MODELOS EXPERIMENTALES
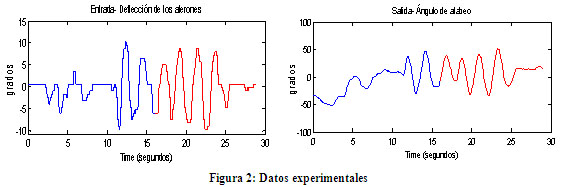
Cada uno de los tres modelos experimentales es desarrollado a partir de datos reales de vuelo, específicamente, se realiza al modelado del ángulo de alabeo (roll angle) sin pérdida de generalidad. Este ángulo presenta baja sensibilidad a cambios en el timón de cola, por lo que esta entrada no será considerada 8. (Fig. 2)
]]>El conjunto de datos está formado por 724 pares con la deflexión en el alerón como variable de entrada y la desviación en el ángulo de alabeo como variable de salida. Los primeros 400 pares se emplean en la identificación y el resto en la validación.
Durante el proceso de identificación, se realiza un pre-procesamiento y filtrado de los datos con el cual se elimina la media aritmética de éstos, así como datos erróneos producidos por errores en el canal de medición.
MODELO LINEAL
Para la identificación se utilizan las herramientas de Identificación de Sistemas que brinda MatLab (System Identification Toolbox). Se realizaron pruebas con los distintos tipos de modelos ofrecidos y con diferentes estructuras. Los mejores resultados se obtienen con la funcion n4sid, la cual estima un modelo en espacio de estado empleando un método de sub-espacio. El modelo resultante es:
![]()
donde:
]]>
MODELO NEURO-BORROSO FUERA DE LÍNEA
Para obtener este modelo (M.ANFIS) se emplean las funciones del Fuzzy Systems Toolbox del Matlab. Se emplea agrupamiento substractivo para crear el modelo inicial y se entrena el sistema durante 50 épocas.
La estructura del modelo no lineal es la siguiente:
![]()
En este caso se obtiene un modelo de 16 reglas, con un total de 92 parámetros, de los cuales 80 son parámetros lineales y 12 parámetros no lineales.
]]> MODELO BORROSO EN LÍNEA
En este caso se realiza la identificación con un proceso diferente al ser el modelado en línea. Para ello, los primeros 150 datos (m = 150) son empleados para obtener el modelo borroso inicial y el resto para el aprendizaje en línea. El modelo borroso evolutivo (M.eFIS) es obtenido con el algoritmo de identificación en línea expuesto en el acápite e.FIS. La estructura seleccionada del modelo es similar a la de M.ANFIS. Los demás parámetros del algoritmo tienen los siguientes valores: å = 50, Rthr = 0.16, Sthr = 0.08 y ë = 0.9. En este modelo se inicia con una regla y el número de reglas finales es de cinco. El número total de parámetros es 45, divididos en 25 parámetros lineales y 20 parámetros no lineales.
ANÁLISIS DE RESULTADOS
Para evaluar el comportamiento de los modelos cuantitativamente se emplea el índice FIT, el cual se calcula como:
![]()
donde: ![]() es el vector de los datos de validación y
es el vector de los datos de validación y ![]() es el vector de las salidas del modelo.
es el vector de las salidas del modelo.
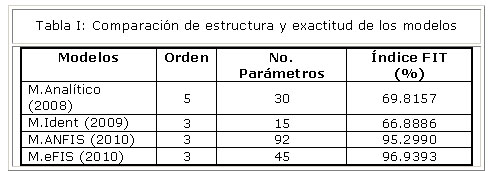
Se aprecia que el modelo borroso evolutivo (M.eFIS) presenta el mejor índice de cuantitativo, con un orden reducido, pero el número de parámetros no es el mejor. A esto habría que agregar que la implementación en hardware de bajo costo sería la más compleja. Este modelo, junto a M.ANFIS, sería útil para realizar estudios del sistema mediante simulación y cuando se necesiten mejoras en las prestaciones de control pues con ambos mejoran significativamente la exactitud de la estimación. En el caso de que se requiera adaptación en línea del modelo, M.eFIS sería el indicado.
En el caso del modelo identificado por técnicas clásicas (M.Ident) es el más sencillo estructuralmente y fácil de obtener aunque es el de peor índices de estimación. Además, si se compara con el modelo analítico (M.Analítico) también hay pérdida de interpretabilidad de los estados. Sin embargo, el tiempo de modelado, la complejidad del proceso de modelado y la cantidad de conocimientos requeridos para obtener el modelo analítico es mucho mayor. Ambos modelos son útiles en la sintonía de estrategias de control clásicas para estos sistemas y deben emplearse en los primeros estudios.
CONCLUSIONES
]]> Los aviones de pequeño porte no tripulados son muy utilizados actualmente en todo el mundo debido a sus aplicaciones y bajos costos, constituyendo un importante campo de investigación en constante desarrollo.
En este trabajo se estudiaron los resultados de cuatro modelos para un UAV, los cuales han permite ganar experiencias y mejorar el comportamiento de los modelos a medida que se ha desarrollado la investigación.
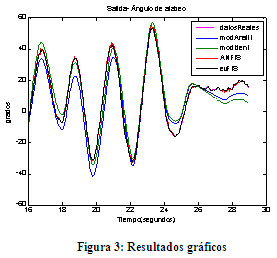
Los resultados experimentales muestran un mejor funcionamiento de los modelos no lineales desde el punto de vista de aproximación numérica, aunque son los de mayor complejidad. En el caso de los modelos lineales son más sencillos y fáciles de emplear en estrategias de control futuras.
Estas características hacen que todos sean potencialmente útiles para su aplicación en el diseño de autopilotos de UAV y lograr su control en tiempo real. No obstante, el desarrollo aquí presentado requiere futuras investigaciones y la implementación en más problemas reales de control y navegación de vehículos aéreos no tripulados.
REFERENCIAS
1. Abusleme, A.C.: «Control difuso de vehículo volador no tripulado», Tesis de Maestría, Stanford, 2000.
2. Ortiz, J.: «Development of a Low Cost Autopilot System for Unmanned Aerial Vehicles», Tesis de M.Sc., Virginia Commonwealth University, 2008.
3. Sorensen, B.V. y otros: «Autonomous Model Airplane», Inst of Electronic Syst - Department of Control Engineering, Aalborg University, 2005.
4. Kumon, M. y otros: «Autopilot system for Kiteplane»: IEEE/ASME Transactions on Mechatronics, Vol. 11, No. 5, pp. 615--624, 2006.
5. Chao, H., Y. CAO y Y. Chen: «Autopilots for small fixed wing unmanned air vehicles: a survey», presentado al IEEE conference on Mechatronics and Automation (IEEE ICMA 2006), Luoyang, China, 2006.
6. Bertuccelli, L.F., H.-L. Choi y P.L. Cho: «Real-Time Multi-UAV Task Assignment in Dynamic and Uncertain Environments», presentado al AIAA Guidance, Navigation, and Control Conference, Chicago, Illinois, 2009.
7. Pineda, L.: «Modelo matemático de un avión autónomo», Tesis de Grado, UCLV, Santa Clara, 2008.
8. Martínez, M.: «Desarrollo de sistemas de control para autopiloto de avión de pequeño porte», Tesis de Grado, UCLV, Santa Clara 2009
9. Ljung, L.: «System Identification: Theory for the User». 2nd ed, Prentice-Hall, Inc., 672, New Jersey, USA, 1999.
10. Kurnaz, S., O. Cetin Y O. Kaynak: «Fuzzy Logic Based Approach to Design of Flight Control and Navigation Tasks for Autonomous Unmanned Aerial Vehicles»: J Intell Robot Syst, Vol. 54, No. 1-3, pp. 229--244, 2009.
11. Salman, S.A., S.G. Anavatti Y J.Y. Choi: «Indirect Adaptive Fuzzy Control of Unmanned Aerial Vehicle», presentado al 17th IFAC World Congress (IFAC'08), Seoul, Korea, 2008.
12. Salman, S.A., V.R. Puttige Y S.G. Anavatti: «Real-Time Validation and Comparison of Fuzzy Identification and State-Space Identification for a UAV Platform», presentado al IEEE International CCA 2006, Munich, Germany, 2006.
]]>13. Pamadi, B.N.: «Performance, stability, dynamics, and control of airplanes». Second ed, ed. V. Reston, American Institute of Aeronautics and Astronautics, Reston, VA, 2004.
14. Adiprawita, W., A.S. Ahmad Y J. Semibiring: «Automated Flight Test and System Identification for Rotary Wing Small Aerial Platform using Frequency Responses Analysis», presentado al International Conference on Intelligent Unmanned System (ICIUS 2007), Bali, Indonesia, 2007.
15. Jang, J.-S.R.: «Anfis: Adaptive-network-based fuzzy inference systems»: IEEE Transactions on Systems, Man and Cybernetics, Vol. 23, No. 3, pp. 665-685, 1993.
16. Jang, J.-S.R., C.T. Sun Y E. Mizutani: «Neuro-fuzzy and soft computIng», Prentice Hall, New Jersey, USA, 1997.
17. Angelov, P.: «An approach for fuzzy rule-base adaptation using on-line clustering»: International Journal of Approximate Reasoning, Vol. 35, No., pp. 275-289, 2004.
]]>18. Angelov, P. Y N. Kasabov: «Evolving Intelligent Systems, eIS»: IEEE SMC eNewsLetter, Vol., No., pp. 1-13, 2006.
19. Martínez, B., F. Herrera, J. Fernández Y E. Marichal: «An Incremental Clustering Method and Its Application in Online Fuzzy Modeling», en Granular Computing: At the Junction of Rough Sets and Fuzzy Sets, R. Bello, y otros Eds, Springer Berlin / Heidelberg, pp. 163-178, 2008
20. Graversen, T., K. Krogh, A. Chávez, R. Ruipérez Y S.V. Vedstesen: «Autonomous aircraft», Inst of Electronic Syst - Department of Control Engineering, Aalborg University, 2001.
Recibido: Diciembre 2011
Aprobado: Febrero 2012
]]>
]]>