
ARTÍCULO ORIGINAL
Controlador ILOS para el seguimiento de caminos en línea recta de un vehículo autónomo subacuático
ILOS controller to follow straight paths for Autonomous Underwater Vehicle
Msc. Yunier Valeriano-Medina, Ing. Anailys Hernández-Julián, Dr. C. Luis Hernández Santana ]]>
Universidad Central de Las Villas (UCLV). Villa Clara, Cuba.
RESUMEN
Los vehículos autónomos subacuáticos representan un tema de gran interés para la comunidad científica a nivel mundial. El sistema de guiado es vital para el desarrollo de maniobras sin intervención humana. En este trabajo se diseña un controlador tipo PI para el seguimiento de caminos rectos por parte del HRC-AUV (vehículo utilizado en esta investigación), reduciéndose el error de seguimiento perpendicular al camino debido al efecto de las perturbaciones marinas. El ajuste de las ganancias del controlador se realiza en base a la geometría del camino y a las características del vehículo. La validez de la propuesta se demuestra mediante simulación, con lo cual se demuestra que el desempeño del controlador ILOS es superior al de la estrategia que actualmente se encuentra implementada en el vehículo.
Palabras claves: AUV, guiado, controlador ILOS, distancia hacia el próximo punto
ABSTRACT
Autonomous underwater vehicles (AUV) represents a topic of great interest to the scientific community worldwide. The guidance system is vital for the development of tasks without human intervention. In this research is designed a type PI controller for tracking paths straight from the HRC-AUV (vehicle used in this research), reducing the tracking error perpendicular to the path despite the effect of sea disturbances. The adjustment of gains of the controller is made based on the geometry of the way forward and the characteristics of the vehicle. The validity of the proposal is found through simulation, which is confirmed that the controller ILOS performance exceeds that of the strategy is implemented at present in the vehicle. ]]>
Key words: AUV, guidance, controller ILOS, lookahead
INTRODUCCIÓN
Un vehículo autónomo es aquel que posee la capacidad de manejarse asimismo, con lo cual puede comportarse de manera independiente durante el cumplimiento de misiones sin intervención humana. Esta característica está asociada a vehículos o sistemas que tienen acceso a la información relacionada con su posición y el medio que los rodea, así como la capacidad de manejar sus actuadores para poder llevar a cabo las diferentes tareas que le son orientadas 1. Para la ejecución de las misiones de manera autónoma, se requiere: planificación de la misión, un sistema de guiado, un sistema de navegación y otro de control. En el marco de esta investigación se aborda el diseño de un sistema de guiado para un vehículo autónomo subacuático (AUV, Autonomous Underwater Vehicle).
Los AUV pertenecen a la familia de vehículos no tripulados (UUV, Unmanned Underwater Vehicle) y se definen como submarinos que portan consigo una fuente de energía y unidades de cómputo, donde se ejecutan softwares y soluciones de control que le permiten al vehículo cumplir misiones sin intervención humana 2, 3.
En Cuba, el Grupo de Automatización Robótica y Percepción (GARP) de la Universidad Central Marta Abreu y el Centro de Investigación y Desarrollo Naval (CIDNAV) trabajan de manera conjunta en el desarrollo de un prototipo de AUV, el cual se dio a conocer con el nombre de HRC-AUV 4, 5, 6. Este proyecto se desarrolla con fines científicos para su posterior aplicación en la exploración del ambiente marino, así como en el reconocimiento de las costas cubanas. Esta investigación tiene diferentes líneas de trabajo, entre las cuales destacan, el desarrollo de los sistemas de navegación, control y guiado.
El guiado de vehículos marinos se define como la acción o el sistema que continuamente calcula la posición, velocidad y aceleración deseada de la embarcación, las cuales son utilizadas por el sistema de control. Estos datos provienen usualmente de un operador humano y del sistema de navegación. Los componentes básicos que presentan los sistemas de guiado son: los sensores de movimiento, los datos referentes al medio externo donde se desarrolla la misión (velocidad y dirección del viento, altura de las olas, velocidad y dirección de las corrientes) y una computadora. La computadora es la encargada de captar y procesar los datos para luego realimentar los resultados hacia el sistema de control de movimiento. En muchos casos se utilizan técnicas avanzadas de optimización, para obtener la trayectoria más adecuada para ser seguida por el vehículo, en ello se pueden considerar diferentes aspectos tales como el ahorro de combustible, la evasión de colisiones, la sincronización, entre otras 1.
Hasta el momento en el HRC-AUV se ha implementado una variante de guiado que solo permite el seguimiento de puntos y que no tiene en cuenta los valores de la posición instantánea del vehículo. En la práctica, este diseño logra cumplir con las misiones asignadas, sin embargo, presenta errores considerables en aquellos tramos de la trayectoria donde es más fuerte la influencia de las corrientes marinas 5. La utilización de una estrategia de guiado basada en un controlador ILOS permite el seguimiento de caminos en línea recta y reduce el error de seguimiento que provocan las corrientes marinas. En este trabajo se diseña y evalúa mediante simulación el desempeño de un controlador ILOS en el HRC-AUV para el seguimiento de caminos rectos. Para lograr la mayor exactitud posible en las simulaciones, se utiliza el modelo dinámico de seis grados de libertad (6 GDL) del HRC-AUV. Este modelo incluye además representaciones del oleaje y las corrientes marinas 5. ]]>
Este artículo sigue la siguiente estructura. La estructura del modelo dinámico de 6 GDL se expone en la Sección II. La Sección III describe el algoritmo de guiado utilizado. En la Sección IV, se presenta el diseño del controlador I-LOS para el seguimiento de caminos. Los resultados del ajuste se presentan en la Sección V. Finalmente, las conclusiones son presentadas en la Sección VI.
MODELO DINÁMICO DEL HRC-AUV
Para analizar el movimiento de los vehículos marinos en los seis grados de libertad (6 GDL), es conveniente contar con dos sistemas de coordenadas, véase figura 1. El sistema coordenado móvil es convenientemente fijado en el vehículo, cuyos ejes xB, yB y zB coinciden con los ejes de inercia. El origen del sistema del submarino (OB) puede ser situado en el Centro de Gravedad (CG) o en el Centro de Flotabilidad (CB) del vehículo, aprovechando el plano principal de simetría. En el caso del HRC-AUV, OB se hace coincidir con CB.
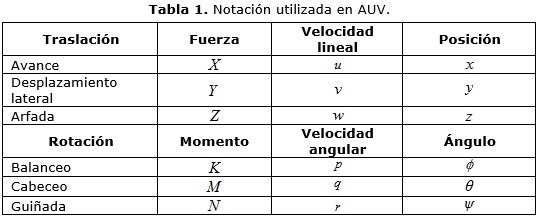
Las maniobras de las embarcaciones marinas abarcan el movimiento en los seis grados de libertad 7. Las tres primeras coordenadas, y sus derivadas en el tiempo, se emplean para describir la posición y el movimiento lineal del vehículo a lo largo de los ejes x, y y z, mientras que las tres coordenadas restantes, se utilizan en la representación de la orientación y el movimiento rotatorio. La tabla 1 resume la nomenclatura estándar empleada para describir el movimiento de submarinos 8.
]]>
El comportamiento dinámico de un AUV se describe mediante las leyes de Newton. Para obtener las ecuaciones de movimiento es necesario asumir que el vehículo es un cuerpo rígido y el sistema de referencia fijado en tierra es inercial. A partir de lo cual se plantea la ecuación (1) 7. 
donde MRB designa a la matriz de masa del cuerpo rígido, MA representa a la matriz de inercia añadida, CRB(v) es la matriz de Coriolis del cuerpo rígido, CA(v) es la matriz hidrodinámica de coeficientes de Coriolis, D(v) agrupa los términos de amortiguamiento, g(η) es el vector de fuerzas gravitacionales y de flotabilidad, y τ =[ τX, τY, τZ, τK, τM, τN]T es el vector de fuerzas y momentos provocados por las entradas de control 7. La estructura de cada una de estas matrices y vectores para el vehículo HRC-AUV han sido determinadas por GARP en investigaciones anteriores 5.
Representación lineal del subsistema lateral
Para el diseño de los controladores de rumbo y profundidad es necesario contar con modelos más simplificados. Una solución consiste en dividir la dinámica en tres subsistemas con poca interacción entre ellos. Esta descomposición está dada por la simetría del vehículo y se encuentra reportada en la literatura 9, 10. Los tres subsistemas y sus variables de estado están dados por:
· Subsistema lateral, utilizado para las maniobras de dirección del vehículo. Variables de estado: v, r y ψ.
· Subsistema longitudinal, útil en maniobras de emersión-inmersión del vehículo. Variables de estado: w, q, θ y z.
· Subsistema horizontal, utilizado para el diseño del sistema de navegación. Variables de estado: u, v y r.
Para el caso de esta investigación resulta de especial interés la dinámica del subsistema lateral, cuya representación matemática mediante función de transferencia se conoce como modelo de Nomoto y es ampliamente empleada en el diseño de controladores de rumbo 7. El modelo en espacio-estado que representa la dinámica del subsistema lateral para el HRC-AUV está dado por 5:
 ]]>
]]>
A partir de esta expresión, es posible obtener el modelo de Nomoto expresado mediante la función de transferencia entre el ángulo de guiñada del vehículo y el ángulo del timón horizontal como:

Los valores numéricos de la ecuación (3) han sido determinados mediante identificación experimental 5. Esta función de transferencia se utiliza para ajustar el controlador de rumbo del HRC-AUV, el cual se encarga de mantener el rumbo del vehículo en valores cercanos a los determinados por el algoritmo de guiado.
Modelo simplificado de las corrientes marinas
Las principales perturbaciones a considerar en el caso de los vehículos marinos son el oleaje y las corrientes marinas. Si se incorporan los efectos que las mismas provocan durante la navegación del vehículo, se puede reescribir la ecuación (1) como 7:

donde (τolas) representa las fuerzas y momentos provocados por las olas mientras que vr simboliza la velocidad relativa de las corrientes.
El efecto de las corrientes marinas constituye la principal afectación en el seguimiento de trayectoria para un vehículo marino. Este efecto se añade al modelo no lineal de 6 GDL del vehículo mediante el término vr (velocidad relativa), ecuación (4). La velocidad relativa se define como:
 ]]>
]]>

Para obtener las componentes de velocidad de las corrientes referidas a OB, se hace necesario aplicar las transformaciones de coordenadas mediante los ángulos de Euler, obteniéndose 7:

Aplicando identidades trigonométricas en la expresión anterior, se obtienen las ecuaciones de las velocidades de las corrientes referidas a OB.


ALGORITMO DE GUIADO BASADO EN LA DISTANCIA LOOKAHEAD
]]>
Si se considera un camino en línea recta definido esencialmente por dos puntos a través de los cuales el vehículo debe pasar, estos puntos pueden ser definidos como pk=[yk, xk]T ∈ ℜ2 y pk+1=[yk+1 , xk+1]T ∈ ℜ2, respectivamente. Considerando a pk como origen de la referencia al camino, cuyo eje x ha sido rotado un ángulo positivo αk = αtan2(yk+1 yk, xk+1, xk) relativo al eje x del sistema de referencia inercial del vehículo. Por tanto, las coordenadas cinemáticas del vehículo respecto al camino pueden ser calculadas de la forma:
siendo R(αk) la matriz que permite rotar la posición del vehículo al sistema de referencia ubicado en el camino:

y ξ(t)=[s(t), e(t)]T tal que s(t) es el error de seguimiento a lo largo del camino y e(t) el error de seguimiento perpendicular al camino, tal como se define en la figura 2.
Para el caso de seguimiento de caminos, donde interesan solo las restricciones espaciales, el objetivo de la ley de guiado se centra en minimizar el valor de e(t); ello significa la convergencia del vehículo al camino. Considerando las ecuaciones (10) y (11) se tiene entonces que:

y el objetivo de control asociado al seguimiento de caminos en línea recta se transforma en: ]]>

La ley de dirección basada en la distancia lookahead, se utiliza con el propósito de conducir al vehículo hacia el camino en dirección al vector LOS y al mismo tiempo, lograr la convergencia a cero de e(t)7. El vector LOS (r), figura 2, se orienta desde la embarcación hasta el punto Pint, que está situado en una línea tangencial al camino, a una distancia lookahead (Δ) de la proyección de la posición del vehículo sobre el camino 1. Esta ley propone determinar la dirección que debe seguir el vehículo a partir de la suma de dos ángulos:

donde Xp= αk, siendo Xp el ángulo tangente al camino y Xr(e) un ángulo de corrección, el cual asegura que la velocidad del vehículo esté en dirección al punto del camino hacia el cual la embarcación se dirige.

La distancia Δ es un parámetro que puede considerarse de manera constante o variable. La selección de la distancia lookahead constituye un tema de investigación abierto, que ha sido abordado por diferentes autores 1. Para el caso particular de esta investigación el valor de Δ será considerado constante.
Si el camino a seguir está conformado por n segmentos en línea recta conectados por n+1 puntos del camino, es necesario emplear una estrategia para saber cuándo un punto del camino ha sido vencido por el vehículo y de esta forma cambiar el objetivo de la misma hacia el siguiente punto. Para ello se establece un criterio que involucra solo al error de seguimiento a lo largo del camino s(t). Teniendo en cuenta que la distancia total entre los puntos pk y pk+1, se define como sk+1, es posible considerar que un punto del trayecto ha sido vencido cuando:

donde Rk+1 es el radio de aceptación, el cual se establece igual a dos veces la longitud del vehículo 7.
]]>
CONTROLADOR PARA EL SEGUIMIENTO DE TRAYECTORIAS
El objetivo del control de seguimiento de trayectoria, consiste en determinar un valor de ángulo de rumbo deseado, que le permita al vehículo ir venciendo los puntos del camino que sean definidos. Esto implica que:

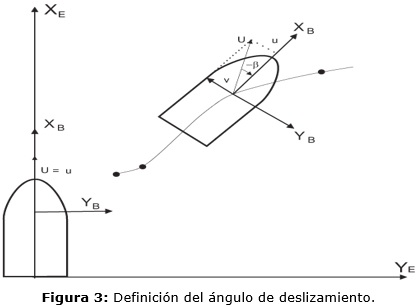
donde β es el ángulo de deslizamiento, formado entre xB y el módulo del vector velocidad del vehículo en el plano horizontal (U), asumiendo que gira sobre el eje zB, su sentido es positivo, por la convención de la regla de la mano derecha, tal como se define en la figura 3.
El ángulo de deslizamiento en condiciones de operación ideales para la embarcación, donde no hay influencia de perturbaciones medioambientales sobre el vehículo, se puede considerar β≈0, esta aproximación no es válida, cuando aparece una componente de velocidad en el eje y, esto ocurre cuando se tienen caminos que no están conformados por líneas rectas o cuando el vehículo realiza giros.
En condiciones ideales el ángulo de deslizamiento se calcula como:
 ]]>
]]>

quedando en función de los valores relativos de estas velocidades, vr está definido en la ecuación (5) y Ur se calcula como Ur =√(ur2 + vr2).
Para disminuir la influencia de las corrientes marinas durante el seguimiento de caminos se pueden utilizar dos métodos:
· Utilizar de un controlador proporcional en el algoritmo de guiado junto con la compensación del ángulo de deslizamiento, el cual se determina a partir de la medición de la velocidad relativa del vehículo.
· Utilizar un controlador con acción integral en el algoritmo de guiado y considerar el ángulo de deslizamiento lateral como una perturbación pequeña de poca variación, es decir βr≈0.
En el caso del vehículo HRC-AUV no se cuenta con mediciones directas y exactas de las velocidades del vehículo, entonces puede considerarse βr≈0 y utilizar en el algoritmo de guiado una ley de control tipo PI. Este controlador se conoce como ILOS 1, 7, 11.
La ley de control ILOS basada en la distancia lookahead queda definida de la siguiente manera:

donde, de acuerdo con la ecuación (15) kp=1/Δ y la ganancia integral debe ser mayor que cero (ki >0). ]]>
La ganancia proporcional puede llegar a saturarse, debido a que Xr(e) ε (-π/2, π/2). Es por ello que desde el punto de vista de control también resulta factible considerar el parámetro Δ constante, ya que con esto se facilita un buen desempeño del controlador. Un pequeño valor de la distancia Δ implica un cambio de forma brusca en el guiado, por lo que se hace necesario buscar un valor de Δ adecuado para cada vehículo. La distancia lookahead debe tener un valor proporcional al largo del vehículo. Algunos autores plantean que el doble de dicha longitud 1, 7, 11, mientras que otros expresan que pude ser n veces su valor 12.El término integral puede ser de gran utilidad en vehículos del tipo AUV, en los que se controla con un solo actuador varios grados de libertad, posibilitando que los mismos sigan caminos en línea recta bajo la influencia de las corrientes marinas. Hay que tener en cuenta que con la inclusión de la acción integral es conveniente el uso de un método anti wind up que permita mantener el valor de salida del regulador en los límites concebidos para el ángulo Xr(e). Algunos investigadores proponen la implementación de un regulador PI que disminuya el efecto wind up 1, 11. La estructura matemática de este controlador se obtiene a partir de redefinir la ecuación (20) como:

donde kint =kkp, siendo k un parámetro de diseño y y•int queda definido como:

Con el objetivo de eliminar el efecto wind up y teniendo en cuenta que las mediciones de velocidad que se tienen en la práctica no son fiables, se selecciona esta variante de ILOS como el controlador a ajustar para que el HRC-AUV logre un desempeño adecuado en el seguimiento de caminos rectos.
RESULTADOS DE LA IMPLEMENTACIÓN DEL CONTROLADOR ILOS
El ajuste del controlador ILOS se realiza en base a la selección de dos parámetros, acorde a lo establecido en las ecuaciones (21) y (22): ]]>
· Δ cuyo valor se selecciona en un rango comprendido entre dos y seis veces la longitud del vehículo.· k cuyo valor debe ser mayor que cero.
Los valores kp =0.025 y k=0.1 son los que se utilizan para el controlador ILOS que se diseña en esta investigación para el vehículo HRC-AUV. Teniendo en cuenta las características y condiciones de maniobrabilidad del vehículo fue seleccionado un valor de Δ=40 (cuatro veces el valor de la longitud del vehículo), a partir del cual fueron calculadas las ganancias del controlador.
La simulación se realiza en Simulink/Matlab utilizando el modelo dinámico del HRC-AUV definido en la ecuación (4). Los parámetros y datos necesarios para la implementación del modelo pueden consultarse en 5. Por su parte, como controlador de rumbo se implementa un P-D cuyos valores de ganancias son: kp =1.5 y kd=1.
Evaluación del controlador ILOS ante cambios en la velocidad de las corrientes
Para evaluar la efectividad del ajuste, se realizan pruebas de simulación variando la velocidad de las corrientes a la que se encuentra sometido el vehículo. El objetivo que se persigue con estas pruebas radica en demostrar, que el controlador ILOS ajustado, es capaz de reducir el error e(t) ante distintos valores de velocidad de las corrientes. Las simulaciones se realizaron utilizando los siguientes datos: velocidad de giro del motor 1000 rpm, 0.01 s de período de muestreo. El efecto del oleaje se simula utilizando el espectro de JOSWAP 5, para un valor de frecuencia fundamental w0 =6.0 rad/s y con un coeficiente de intensidad de las olas σ =0.5. Las corrientes marinas se simulan acorde a lo planteado en la ecuación (8) y (9), tomando como valores de amplitud de las mismas: VCA =0.1m/s, VCA =0.5m/s y VCA =1m/s, manteniendo el ángulo de dirección constante en βC =240 °.
El resultado de las pruebas realizadas se observa en la figura 4, y muestra que para los valores más elevados de la velocidad de las corrientes e(t) incrementa su valor, pero la acción integral en todos los casos logra que se estabilice en cero.
]]>
Evaluación del controlador ILOS durante el seguimiento de distintas trayectorias
A continuación se presentan los resultados obtenidos mediante simulación con el controlador ILOS utilizando los datos de dos experimentos realizados con el HRC-AUV en el mar. En todos los casos se utiliza como criterio de punto vencido el definido en la ecuación (16), considerando que el radio de aceptación es de 20m (dos veces la longitud del vehículo). La evaluación del desempeño se realiza en función del error de seguimiento perpendicular al camino.
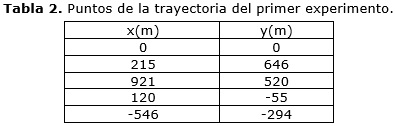
Los datos del primer experimento utilizados en la simulación son: velocidad de giro del motor 500 rpm, 0.01 s de período de muestreo, las corrientes marinas se simularon con una velocidad de VCA =0.18m/s y una dirección de βC =240 °, frecuencia fundamental de las olas w0 =6.0 rad/s y coeficiente de intensidad de las mismas σ =0.5. Los puntos que describen la trayectoria utilizada en la simulación se presentan en la tabla 2.
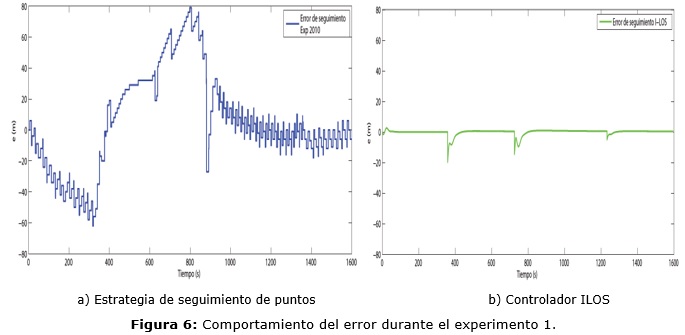
En la figura 5 se presenta la trayectoria deseada en color rojo, la trayectoria real seguida por el vehículo durante el experimento en color azul y la trayectoria simulada con el controlador ILOS cuya curva se muestra en color verde. La trayectoria real seguida por el vehículo se obtuvo a partir de los datos obtenidos con el GPS. La misma constituye el resultado de la estrategia de seguimiento de puntos que actualmente se encuentra implementada en el hardware de bajo nivel a bordo del HRC-AUV. Como se percibe, el sistema de guiado con el controlador ILOS sigue la trayectoria de forma mucho más precisa, lo cual se evidencia de manera contundente al observar la figura 6, donde se muestra el comportamiento de e(t). El error de seguimiento perpendicular al camino disminuye considerablemente cuando se utiliza un controlador con acción integral.
Con el propósito de demostrar la mejoría en el desempeño del sistema de guiado del HRC-AUV, que asegura el controlador ILOS, se procede a realizar un análisis estadístico utilizando el test de Kolmogorov-Smirnov. La evaluación estadística se efectúa entre la trayectoria en el plano x-y obtenida con el controlador ILOS que se propone en esta investigación, respecto a la trayectoria deseada. Este test permite evaluar muestras bivariadas, estableciendo como hipótesis que ambas muestras pertenecen a un mismo conjunto de distribución estadística para un intervalo de confianza (α=0.05) 13. Los resultados obtenidos se aprecian en la tabla 3, donde la hipótesis establecida se cumple (H=0) con un valor de probabilidad (pValue=0.3403). De esta manera queda corroborado que el controlador ILOS diseñado para el HRC-AUV asegura un adecuado desempeño en el seguimiento de caminos rectos. ]]>

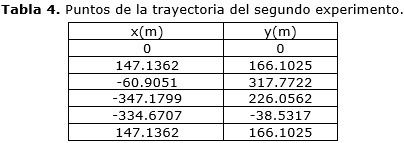
Los puntos que definen a la trayectoria correspondiente al segundo experimento se presentan en la tabla 4.
La trayectoria abarca un recorrido de 0.98 km, mucho menor que la seguida durante el primer experimento. La velocidad de giro del motor ahora es de 1000 rpm, la amplitud de las corrientes utilizada fue de VCA =0.05m/s, con un ángulo de dirección de βC =45 °. Los valores relacionados con el oleaje y el período de muestreo se mantuvieron iguales que en el experimento anterior.
En la figura 7 se presentan los resultados obtenidos al graficar la trayectoria deseada en color rojo, la real seguida por el vehículo con la estrategia de seguimiento de puntos en color azul y la simulada con el controlador ILOS en color verde. El controlador ILOS nuevamente asegura un mejor seguimiento de la trayectoria deseada. Esto queda mejor demostrado al observar en la figura 8 el comportamiento del error perpendicular al camino durante el seguimiento de la trayectoria.
Los resultados de este experimento no son tan buenos en comparación con los del anterior, lo cual está dado por dos factores fundamentales: el vehículo aumentó su velocidad y la trayectoria es mucho menor que la recorrida en la primera trayectoria, por lo que las oscilaciones alrededor del camino deseado se hacen mucho más grandes. Estos elementos hacen que al vehículo le cueste mucho esfuerzo estabilizar su posición cerca de la trayectoria antes de que se considere a un punto como vencido.
CONCLUSIONES ]]>
Como resultado final arrojado por esta investigación, se diseña un controlador ILOS para el seguimiento de caminos en línea recta por parte del HRC-AUV, que reduce el error de seguimiento perpendicular al camino a pesar del efecto de las corrientes marinas, lo cual queda demostrado mediante simulación. El ajuste del controlador se realiza teniendo en cuenta la geometría del camino y las características del vehículo. La estructura matemática definida para el controlador ILOS es de fácil implementación y tiene en cuenta el efecto wind-up que se produce cuando se incluye una acción integral. El cálculo de las ganancias del controlador depende en lo fundamental de la selección del valor de la distancia lookahead, la cual se considera constante y dependiente de la longitud del vehículo. El controlador ILOS para el HRC-AUV que se propone en esta investigación logra resultados superiores respecto a la estrategia que en estos momentos se encuentra implementada en el vehículo.
REFERENCIAS
1. Lekkas, Anastasios M. «Guidance and path-planning systems for autonomous», Tesis doctoral. The Norwegian Institute of Technology, Noruega, 2014.
2. Fjellstad, Ola-Erik: «Control of unmanned underwater vehicle in six degrees of freedom a quaternion feedback approach», Tesis doctoral. The Norwegian Institute of Technology, Noruega, 1994.
3. Antonelli, Gianluca; Fossen, Thor I.; Yoerger, Dana R. «Underwater Robotics». En: Springer Handbook of Robotics. Springer-Verlag, 2008. pp. 987-1007.
4. Garcia-Garcia, Delvis., et al. «Wave filtering for heading control of an AUV based on passive observer». Indian Journal of Geo-Marine Sciences. 2012, vol. 41, núm. 6, pp. 540-549.
5. Valeriano-Medina, Yunier., et al. «Dynamic model for an autonomous underwater vehicle based on experimental data». Mathematical and Computer Modelling of Dynamical Systems : Methods, Tools and Applications in Engineering and Related Sciences. 2013, vol. 19, núm. 2, pp. 175-200.
6. Martinez, Alain., et al. «Arquitectura de hardware y software para AUV, resultados experimentales». Revista Iberoamericana de Automática e Informática industrial. 2013, vol. 10, núm. 3, pp. 333-343.
7. Fossen, Thor. I. Handbook of Marine Craft Hydrodynamics and Motion Control. Ed. Wiley & Sons, Estados Unidos, 2011.
8. SNAME: «Nomenclature for treating the motion of a submerged body through a fluid», Reporte Técnico. SNAME, Estados Unidos, 1950.
9. Jalving, Bjørn.; Storkensen, Nils. «The control system of an autonomous underwater». Modeling, Identification and Control. 1995, vol. 15, núm. 2, pp. 107-117.
10. Isiyel, Kadir. «Autopilot design and guidance control of ULISAR UUV (unmanned underwater vehicle)», Tesis de maestría. Middle East Technical University, Turquía, 2003.
11. Børhaug, Even; Pavlov, Alexey; Pettersen, Kristin Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents. En Decision and Control, 2008. CDC 2008. 47th IEEE Conference on. IEEE, 2008. p. 4984-4991.
12. Healey, Anthony. J. Guidance laws, obstacle avoidance and artificial potential functions. IEE CONTROL ENGINEERING SERIES, 2006, vol. 69, p. 43.
13. Peascock, John. A. «Two-dimensional goodness-of-fit testing in astronomy». Monthly Notices Royal Astronomy. 1983, vol. 202, pp. 615-627.
Recibido: 20 de abril de 2014
Aprobado: 17 de enero de 2015
Yunier Valeriano Medina, Universidad Central de Las Villas (UCLV), Cuba. Correos electrónicos: yunierv@uclv.edu.cu; anailyshj@uclv.cu; luishs@uclv.edu.cu
]]>




{kind=link}
{kind=link}