










 Custom services
Custom services Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
El aerogenerador que más se utiliza en la actualidad es el Generador de Inducción Doblemente Alimentado (DFIG, por sus siglas en inglés). La máquina DFIG es una máquina de inducción que posee un rotor bobinado con su circuito de rotor conectado a la red a través de un sistema de convertidores de electrónica de potencia, mientras que el estator es conectado directamente a la red. Por sus características constructivas y por los elementos que la componen, como el caso de los convertidores, se han venido realizando estudios por la alta capacidad para la operación de este tipo de máquinas en condiciones de isla.
La condición de isla ocurre cuando un sistema de generación distribuida (en este caso un parque eólico) queda aislado de la red principal. Pueden ocurrir dos situaciones de isla: la intencional y la no intencional. La formación de islas de forma no intencional puede ser bastante peligrosa, sin embargo si se hace de manera intencional, puede ser posible la alimentación de pequeñas cargas que quedaron aisladas de la red principal.
El desafío para las DFIG durante la operación de isla es la pérdida de referencia de frecuencia de la red eléctrica principal que causa un desbalance en la potencia generada por la turbina eólica. Existen publicaciones sobre la integración de generadores independientes de turbina eólica para la operación en isla de parques eólicos [1-3] pero su funcionamiento depende de una fuente de frecuencia primaria en la isla, como los generadores síncronos que son utilizados por las DFIG como referencia de frecuencia. Si se produce un error en la fuente de frecuencia primaria, toda la isla se enfrentará a una situación de colapso. En [2] se presentan dos propuestas: la primera, el PLL (del inglés Phase-Locked Loop) que ya es un bloque funcional de control P-Q desacoplado, rastrea el promedio de las frecuencias de las señales en su punto de conexión; la segunda, cada DFIG individual en el seguimiento del promedio de las frecuencias de las otras DFIG en el parque eólico converge a una sola frecuencia común.
Los estándares como el IEEE 15472003 [2], asignan un período máximo de 2 segundos para la detección del funcionamiento en isla y la desconexión de la unidad de generación para garantizar la seguridad del personal y prevenir el cierre fuera de fase. Esta no es una opción económicamente viable ya que el sistema DFIG con el control apropiado puede continuar suministrando energía a las cargas locales y por lo tanto operar como una microred aislada. Sin embargo, la operación en isla disminuye el intervalo de tiempo dentro de los relés de detección de isla (IDR, por sus siglas en inglés) que deben operar para activar los controladores asociados. El tiempo máximo dentro del cual el relé debe dispararse para detectar una isla, ha sido actualizado a 500 ms .
Los IDR, propuestos o implementados, pueden clasificarse ampliamente como métodos pasivos, activos y basados en la comunicación. El relé de velocidad de cambio de frecuencia (ROCOF) es un método pasivo y, por lo tanto, tiene limitaciones características para estos relés, es decir, tiene una zona de no detección (NDZ) cerca de cero en la desigualdad de generación de carga. Si el relé se vuelve demasiado sensible al cambiar su configuración para superar el NDZ, puede identificar falsamente la variación de carga o falla en los alimentadores adyacentes como un caso de formación de isla. En los últimos años, se ha llevado a cabo un trabajo de investigación para la formación de islas alimentadas por DFIG para mejorar la característica operativa de ROCOF. Las limitaciones de sonido se han superado hasta cierto punto al agregar otros estados del sistema como función de interbloqueo, introducir perturbaciones activas a través de los convertidores de DFIG o perturbar el relé cerca de su NDZ. [4-6],
Materiales y métodos
La operación en isla es un modo de operación significativo de la turbina eólica y este puede ampliar el rango de aplicación de la misma . Este modo de operación puede mejorar la capacidad de servicio y reducir el costo del suministro de energía en algunas regiones remotas o islas. Por otro lado, las pérdidas económicas causadas por el fallo de la red eléctrica en algunas zonas que carecen de un suministro de energía de emergencia, pueden ser reducidas cuando las cargas locales importantes son alimentadas por la turbina eólica.
En [7], se proponen estrategias de control coordinadas de las turbinas eólicas y los sistemas de almacenamiento de energía para estabilizar la red eléctrica en isla.
Por otra parte, en [4-7], con la introducción de la estrategia de control de las variaciones producidas, el DFIG puede responder a los cambios de frecuencia y tensión de la red eléctrica aislada y mantener su tensión y frecuencia en niveles estables, por lo que el DFIG puede seguir suministrando energía a la carga en caso que ocurra una desconexión de la red principal. Mediante la aplicación de las estrategias de control propuestas en [8-11], el DFIG tiene la capacidad de funcionar en el modo isla.
Sin embargo, estas estrategias sólo hacen que el DFIG sea esencialmente similar a una fuente de corriente, de modo que una fuente de alimentación grande es necesaria para mantener la tensión de la red eléctrica en isla.
Además, en [11], se presenta una estrategia llamada control de orientación indirecta al flujo del estator (indirect stator-flux orientation) (ISFO, por sus siglas en inglés) que es conveniente para el DFIG. Esto permite que el generador de inducción doblemente alimentado con características de fuente de tensión pueda controlar independientemente la frecuencia y la amplitud de su tensión de estator.
Aunque el DFIG puede obtener la capacidad de suministrar energía a la carga independientemente de la aplicación de la estrategia de control de ISFO. Funcionando en el modo isla, el ajuste frecuente de la velocidad de rotación y del ángulo pitch puede producir fatiga mecánica en el DFIG y afectar seriamente su vida de servicio.
Otro inconveniente para la operación en isla, es que este tipo de sistemas a veces presentan problemas en dos áreas diferentes: sobregeneración o subgeneración.
Según [11], el DFIG con sistema de almacenamiento puede ser considerado como dos fuentes de energía: una es el DFIG con el convertidor en el lado del rotor y otra es el almacenamiento en el lado de carga.El control del convertidor lado del rotor permitirá capturar la máxima potencia del viento, mediante el control del torque de la máquina de acuerdo a las características del rastreo de potencia de la turbina eólica. La combinación del generador de inducción y el convertidor lado del rotor es capaz de controlar la potencia activa y reactiva independientemente. Por otro lado, el convertidor de lado de la carga con almacenamiento se comporta como un inversor basado en generación distribuida. En el caso de la operación en isla, el sistema de almacenamiento puede proveer estabilidad al sistema y podrá regular la frecuencia y la tensión del sistema. De acuerdo a la desviación de la frecuencia y la tensión del sistema debido a la demanda de la carga activa y reactiva en orden de mantener el balance de energía y también a la frecuencia y la tensión cerca de sus valores nominales.
En una situación de sobregeneración, el controlador sustrae energía hasta el sistema de almacenamiento, hasta el límite máximo de carga. En una situación de subgeneración, cuando la para generar la energía requerida y contrarrestar la demanda, el controlador del sistema aplica la política de desprendimiento de carga.
Métodos de detección de islas (MDIs)
Los MDIs puede ser clasificados principalmente en dos grupos: local y remoto. Los MDIs de comunicación o remotos están basados en la comunicación entre la red principal y la generación distribuida [12-14]. Los MDIs remotos siguen el esquema de la señal de aviso y el esquema de potencia de línea señalado,etc. Los MDIs locales están basados en los parámetros del sistema como tensión, frecuencia, entre otras en el lado de la GD.
Los MDIs locales están divididos en métodos activos, pasivos y híbridos. Los MDIs pasivos supervisan continuamente la tensión, la frecuencia, el ángulo de fase y la distorsión armónica etc. al final de la GD para identificar los fenómenos de isla. En el método activo se introduce una perturbación externa al sistema que rastrea los cambios en los parámetros que se definan. Los métodos híbridos son la combinación de ambos.
Bajo/sobre tensión
Todos los inversores que interactúan con la red necesitan de un circuito para detectar los cambios de tensión durante la interrupción de la red principal. Para esto, el circuito mantiene un nivel de umbral evitando falsas desconexiones.
Baja/sobre frecuencia
Cuando una microred no está conectada a la red principal, la frecuencia de la potencia que está siendo suministrada al circuito cambia, este cambio se utiliza para detectar los fenómenos de isla.
Detección del salto de tensión de fase (PJD)
Si la salida de una unidad GD está balanceada con las cargas locales, generalmente los cambios de tensión y frecuencia no son suficientes para la detección de la isla. El método PJD puede identificar un cambio en la diferencia de fase (desfasaje) entre la tensión y la corriente durante la interrupción de la red principal.
Rango de cambio de la frecuencia (ROCOF)
El ROCOF es también usado como un método de detección de isla. El rango de cambio de la frecuencia es expresado como se represneta en la ecuación (1):
donde f es la frecuencia del sistema, t el tiempo, ∆P es la variación de la potencia (P_m-P_e), G es la capacidad del sitema, y H la constante de inercia del sistema. Si el valor de ROCOF es más alto que un cierto valor, el sistema de generación en estudio será desconectado de la red [15,16].
El rango del cambio de la frecuencia es calculado usando una ventana de medición de unos pocos ciclos de la forma de onda de la tensión. La señal resultante es filtrada por la función de transferencia de primer orden 1/(TaS+1), que representa un filtro de paso bajo usado para eliminar la transiente de alta frecuencia, donde Ta representa la constante de tiempo del filtro y la ventana de medición adoptada. Si el valor del rango de cambio de la frecuencia es más alto que el valor umbral β, una señal de aviso es enviada al interruptor del circuito del generador. K es el rango del cambio de la frecuencia medido después del proceso de filtración.
Detección de Armónicos(THD)
Durante la isla, la distorsión armónica total (THD, por sus siglas en inglés) en los terminales de la GD aumenta, y esta puede ser medida para detectar el fenómeno de isla.
En el método activo, pequeñas señales de perturbaciones son intencionalmente introducidas en los terminales de la GD para detectar la isla, midiendo el efecto de las perturbaciones en la tensión, la frecuencia, y las impedancias.
Los cambios en la carga para la GD debido a la pérdida de la fuente de alimentación principal, causan variaciones en los armónicos de la corriente. De este modo, se propone la THD de la corriente como una de las corrientes en los parámetros de monitoreo. La distorsión armónica total de la corriente en el tiempo es definida como se muestra en la ecuación (2)
Donde:
I 1 |
Valor efectivo o rms de la componente fundamental de la señal. |
I h |
Valor rms de la componente h th de la señal. |
H |
Número de armónicos. |
Durante cada ciclo con la prueba de N, el promedio de THD será obtenido por la ecuación (3):
Durante la operación normal, la diferencia entre THD t y THD avgt es pequeña y varía alrededor de pequeños valores, pero cuando las turbinas eólicas son desconectadas de la red de distribución es esperado que la diferencia será lo bastante alta (mayor del 10 %) como para distinguir la red en isla.
Por lo tanto, es definido un parámetro normalizado basado en la diferencia de THD t y THD avgt . Este parámetro se muestra en la ecuación (4):
donde THD avgt es el valor de referencia de THD para el estado estable y condiciones normales de carga.
Si el
El algoritmo comienza probando las corrientes de las tres fases y calcula su THD. Cuando la red eléctrica de distribución trabaja en una condición balanceada es suficiente la prueba de una sola fase, si esto no ocurre, es necesaria la prueba de las tres corrientes de fase.
Método de inyección de corrientes de secuencia negativa
Este método puede descubrir un incidente de isla dentro de casi 60 ms. (3.5 ciclos).
Medición de la impedancia (IM)
En este método, se aplica de manera forzada una pequeña corriente al circuito para medir la impedancia total del circuito que es alimentado por el inversor. Normalmente no habrá ningún cambio de la tensión medido, pero durante la desconexión, es obvio que ocurra un cambio de la tensión.
Medición de la impedancia a una frecuencia específica o salto de amplitud armónica
Similar a la medición de la impedancia, aquí también el inversor inyecta armónicos al sistema a una frecuencia específica y espera a la señal que viene de la red.
Cambio de frecuencia en modo de resbalamiento (SMS)
En este método, la fase de salida del inversor se hace ligeramente y de forma forzada mal alineada con la señal de la red. La red ajustará automáticamente esta señal en su circuito interno. En ausencia de la red, inmediatamente el sistema cambiará lejos de la frecuencia asignada, causando la desconexión del inversor.
Afectación de la frecuencia
En este método se inyecta una leve señal fuera de frecuencia a la red, pero "la para" volviendo atrás en el fin de cada ciclo, en una fase cuándo la señal de tensión pasa por el cero.
Desequilibrio de tensión y punto ajustado (set point) de frecuencia
En este método, caídas cortas de ambos métodos son eliminadas cuando estos son aplicados simultáneamente. Cuando el desequilibrio de tensión (VU, por sus siglas en inglés) es mucho más sensible para reaccionar con la perturbación que el THD, este método puede distinguir eficazmente entre la isla y el cambio de las condiciones de carga.
Técnica basada en el cambio de tensión y potencia activa
Aquí un promedio del rango de cambio de tensión (método pasivo) y del cambio de la potencia activa (método activo) es combinado para conseguir un método mejorado para la detección de islas.
Inyección de fluctuación de tensión
Este método es una combinación del rango de cambio de la frecuencia (ROCOF), del rango de cambio de tensión (ROCOV), y del factor de corrección de detección de isla (CF) para identificar la condición en isla.
Técnicas basadas en la transformada de pequeñas ondas (WTT)
Este método usa las señales de tensión transiente o la componente de secuencia negativa de la señal de tensión o los cambios espectrales de la componente de frecuencia más alta producida en el PCC durante el transcurso de los fenómenos de isla. Este método proporciona una zona de no detección (NDZ, por sus siglas en inglés) casi cero.
Discusión de resultados
Los modelos que se presentan a continuación implementados en el Simulink del Matlab son dos métodos de detección de islas, un relé ROCOF (método pasivo), y un algoritmo que mide la distorsión armónica total de la corriente de fase del generador (método activo).
El método para la detección de islas basado en el relé ROCOF que analiza el cambio de la frecuencia en el sistema es uno de los métodos más utilizados en la actualidad para la detección de islas debido a su sencillez y a su rápida conmutación. Aunque presenta una desventaja que es su zona de no detección cerca de cero; esta no es un gran inconveniente para la detección de la isla.
Por otra parte, el método activo basado en un algoritmo que detecta la distorsión armónica total de las corrientes de fase del generador de la turbina eólica es bastante preciso aunque también posee una desventaja, ya que para detectar el cambio de los armónicos, inserta una señal leve que puede causar perturbaciones y afectar la calidad de la energía, aunque se sigue considerando un método bastante preciso para la detección de islas.
En el caso del método que utiliza el THD, es sólo muestreada una fase puesto que la carga se asume como balanceada para simplificar el análisis. En caso que la carga no sea balanceada, se deben muestrear las tres corrientes de fase del generador.
La señal de entrada es la frecuencia del sistema que es muestreada constantemente por el PLL. Esta señal es derivada en el tiempo, luego el filtro de paso bajo elimina la transiente de alta frecuencia y este valor (señal K) es comparado con el valor umbral del relé ROCOF (β), de 1 Hz/s, cuando se utiliza sin entrelazarlo a ningún otro método. Si el valor muestreado sobrepasa el valor umbral del relé, es enviada una señal de aviso y la isla es detectada.
La figura 1, muestra el esquema de detección de isla, utilizado en la simulación, con su diagrama de bloques.

En la simulación, el fenómeno de isla ocurre en T=5s, cuando se observa un cambio en la frecuencia del sistema. La figura 2, muestra como el bloque PLL, muestrea el cambio de frecuencia.
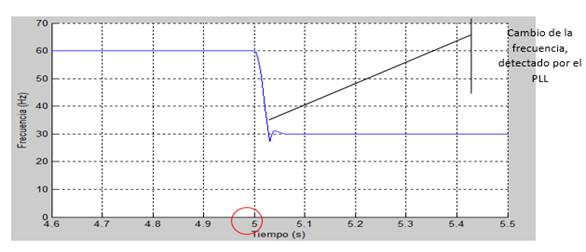
En la figura 2, se puede observar como en T=5s, el valor de la frecuencia cae, producido por el fenómeno de isla. Esta caída de la frecuencia es detectada por el relé ROCOF, el cual envía una señal al interruptor del circuito del generador, como se muestra en la figura 3.

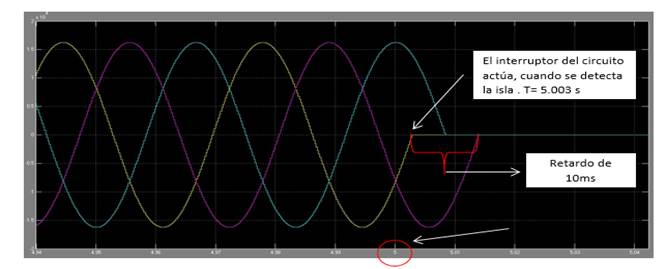
Al recibir la señal, el interruptor del circuito del generador se abre, como se muestra en la figura 4, por lo tanto, la isla se ha detectado con precisión
Simulación del MDI basado en el algoritmo de cálculo del THD de la corrientes de fase del generador.
La figura 5, muestra el esquema utilizado para la detección de la distorsión armónica total. En esta simulación, se toman la generación y la carga como balanceada, por lo que no es necesario, el cálculo de THD para las corrientes de cada fase. En este caso se muestrea sólo la corriente Ia de fase.
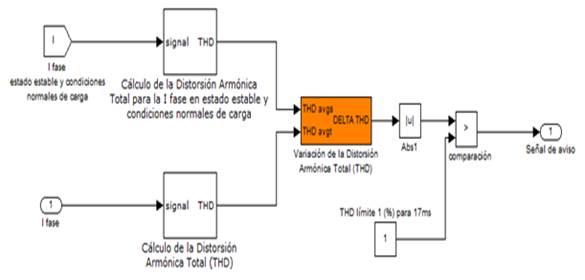
Como se puede apreciar en la figura 5, se calcula el THD de la corriente de fase en estado estable y condiciones normales de carga, que se toma como valor de referencia. Luego se calcula la variación del THD que es comparada con su valor umbral o límite, que según [16], tiene que ser mayor que 1% para 17 ms. Cuando la condición se cumpla, es enviada una señal al interruptor del circuito y la isla es detectada.
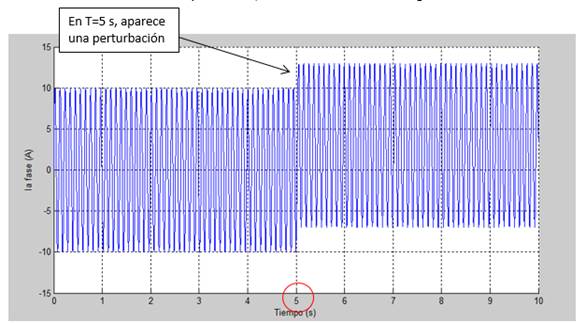
La condición de isla ocurre en T=5 s esto provoca una perturbación en el valor de la señal de la corriente la cual es detectada por el MDI, como se muestra en la figura 6.
El MDI, después de detectada la condición de isla, envía una señal al interruptor del circuito y este se abre. Por lo que se confirma la detección de la isla, como se muestra en la figura 7.

Como se puede apreciar en la figura 8, que muestra una gráfica ampliada de la I a de fase del generador, muestra como este sale de servicio en T=5.027 s, con sólo 27 ms de retardo con respecto al tiempo en el que es detectada la isla T=5 s.

Después de analizar las simulaciones de ambos métodos, se llega a la conclusión que el método que conmuta más rápido (13 ms, en total) es el que mide la variación de la frecuencia (ROCOF). Aunque el método que mide el THD de la corriente de fase del generador conmuta bastante rápido (27 ms), este tiene una desventaja clara, la perturbación mostrada como fenómeno de isla también puede ser provocada por el arranque de grandes grupos de motores conectados a la red, y otros fenómenos que pueden causar una mala operación de este método de detección. Por ello, una combinación de estos dos métodos ayudaría a que la detección fuera más efectiva.
La selección como el método más adecuado es la que utiliza el relé ROCOF. Sus bondades como su rápido poder de detección y el bloque GDSC_PLL utilizado ayudan a reducir la mala operación del método y mantiene la detección de isla dentro de los códigos de red actuales, 2s para la detección de la isla, y 500 ms para el disparo del relé.
Conclusiones
De acuerdo a las características de funcionamiento del DFIG, puede ser utilizado en modo de operación normal, así como en funcionamiento en isla.
Entre los diferentes métodos de control para la detección del funcionamiento en isla del DFIG se escogió el MDI basado en el relé ROCOF, como el método más adecuado para la implementación de la detección de los fenómenos de isla, debido a su sencillez y facilidad de implementación.
El método implementado en la simulación se probó en un escenario donde la frecuencia del sistema disminuía, consiguiendo que la detección de la isla fuera 3 ms aproximadamente y un retardo de 10 ms, para la completa desconexión del generador, muy por debajo de la norma de la IEEE que indica que la isla debe detectarse antes de los 2s, y que los relés de detección deben dispararse antes de los 500 ms.

